
Closed-Loop Control of Chemical Injection Rate for a Direct Nozzle Injection System

Abstract
:1. Introduction
2. Materials and Methods
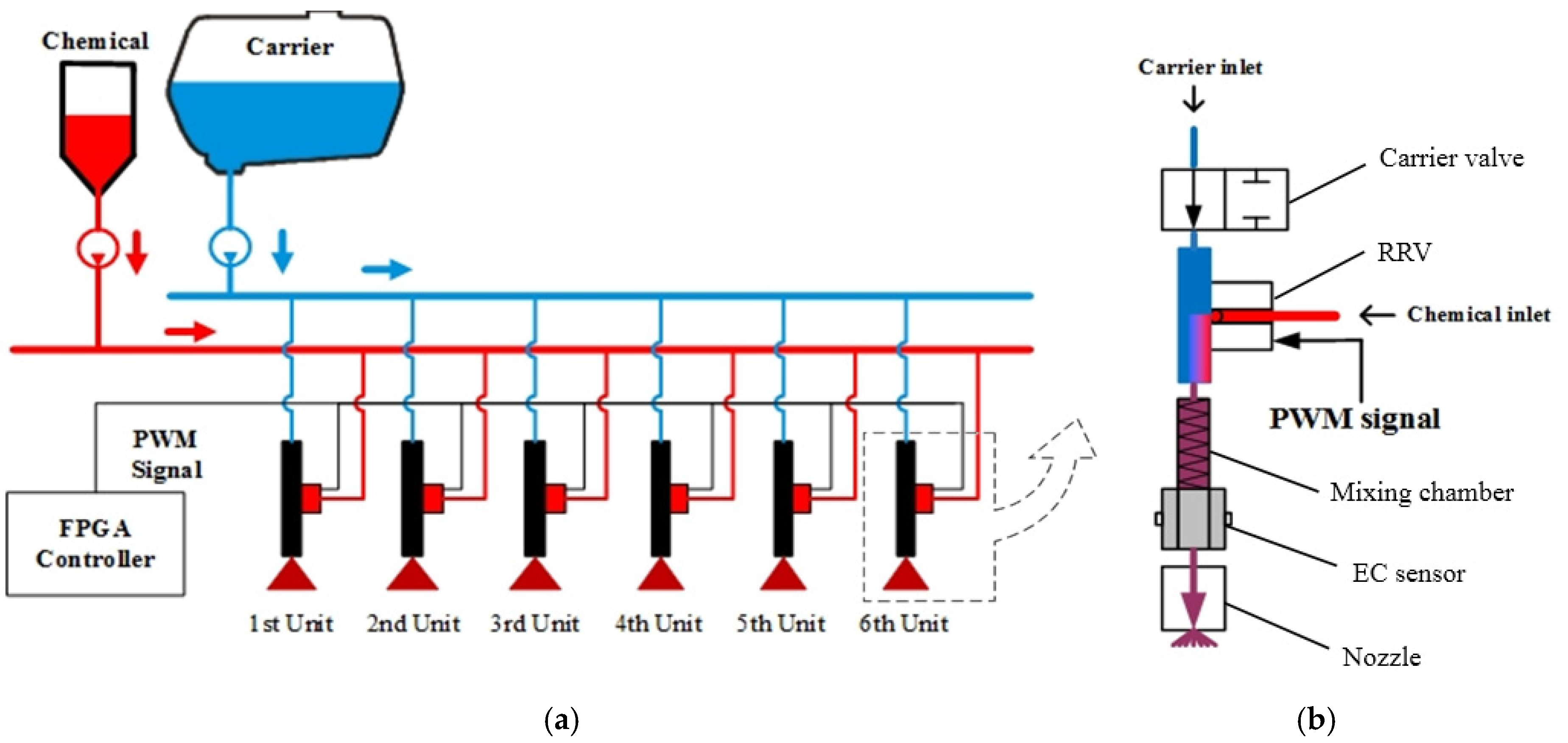
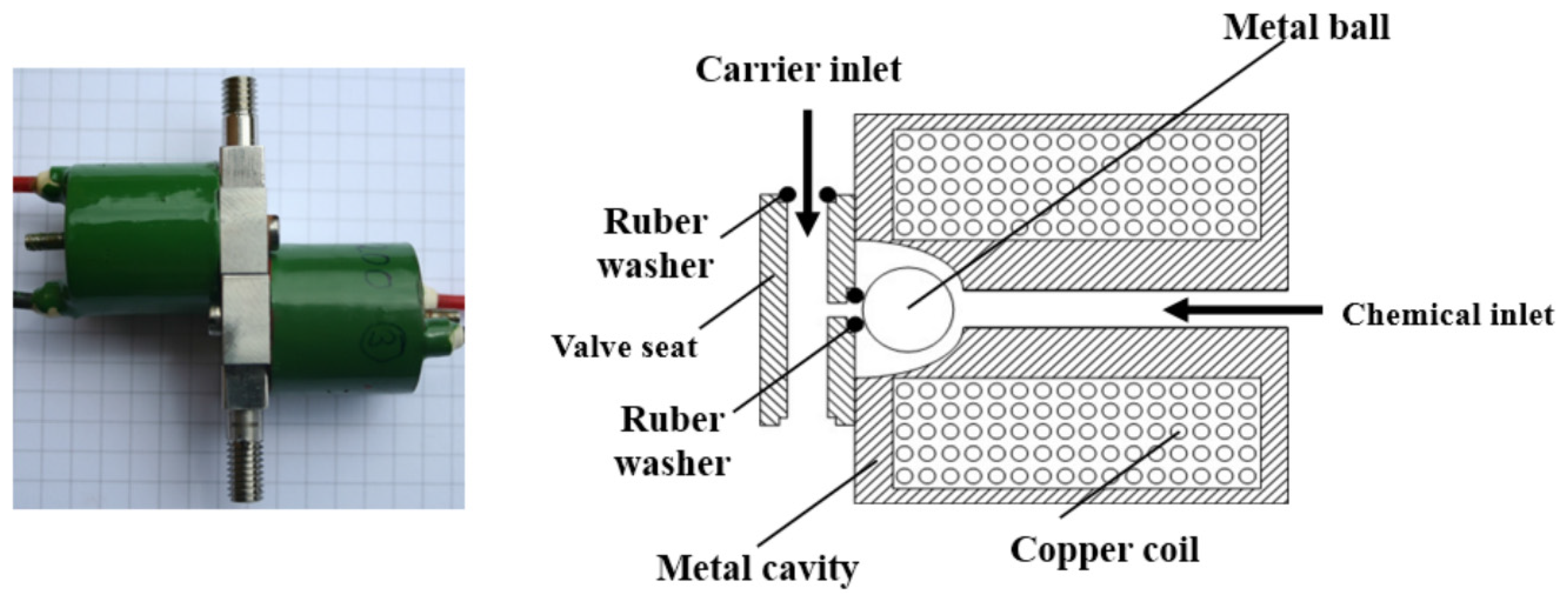
2.1. Description of RRV

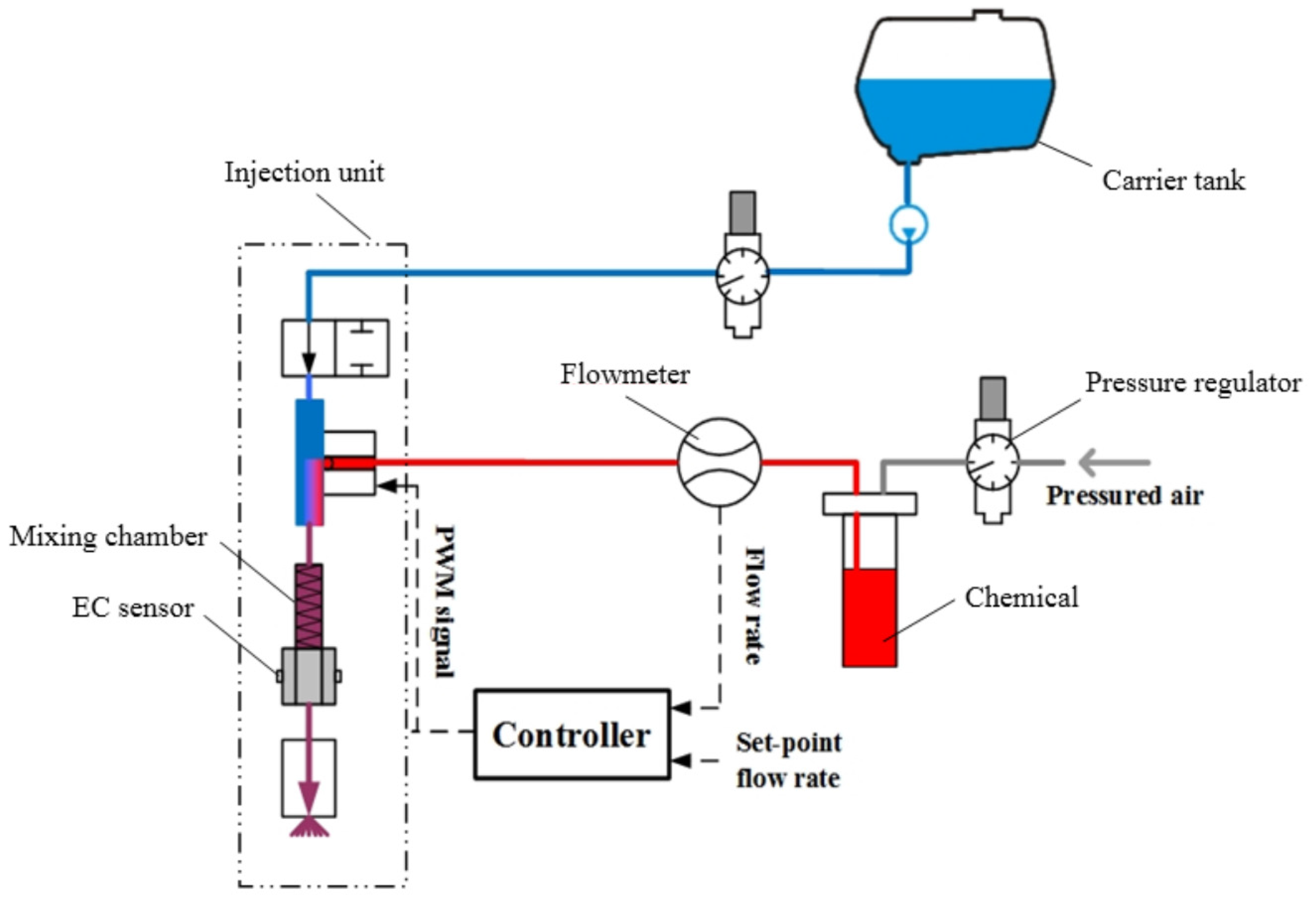
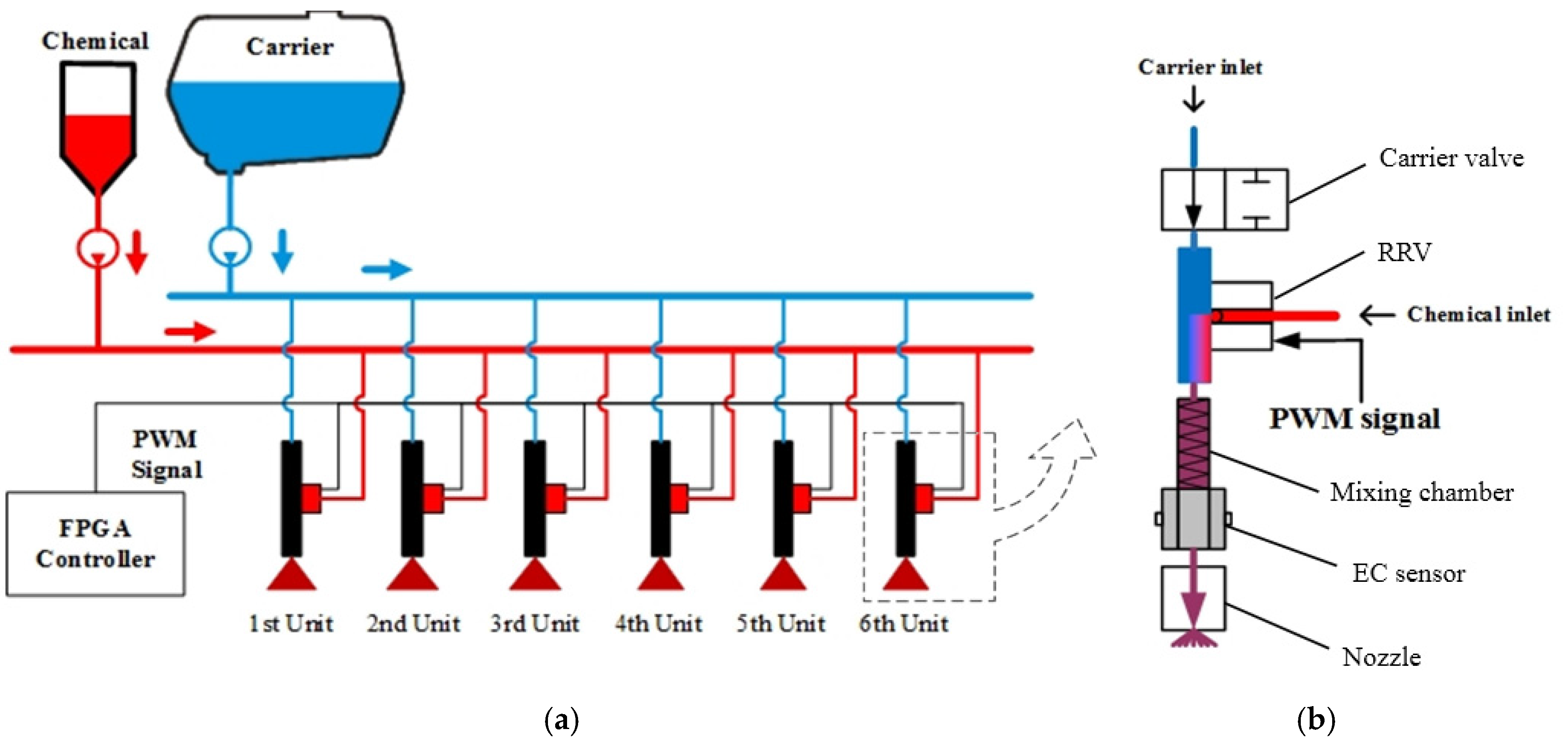
2.2. Experiment Setup
2.3. Uniformity Test of 6 RRVs in One Boom Section
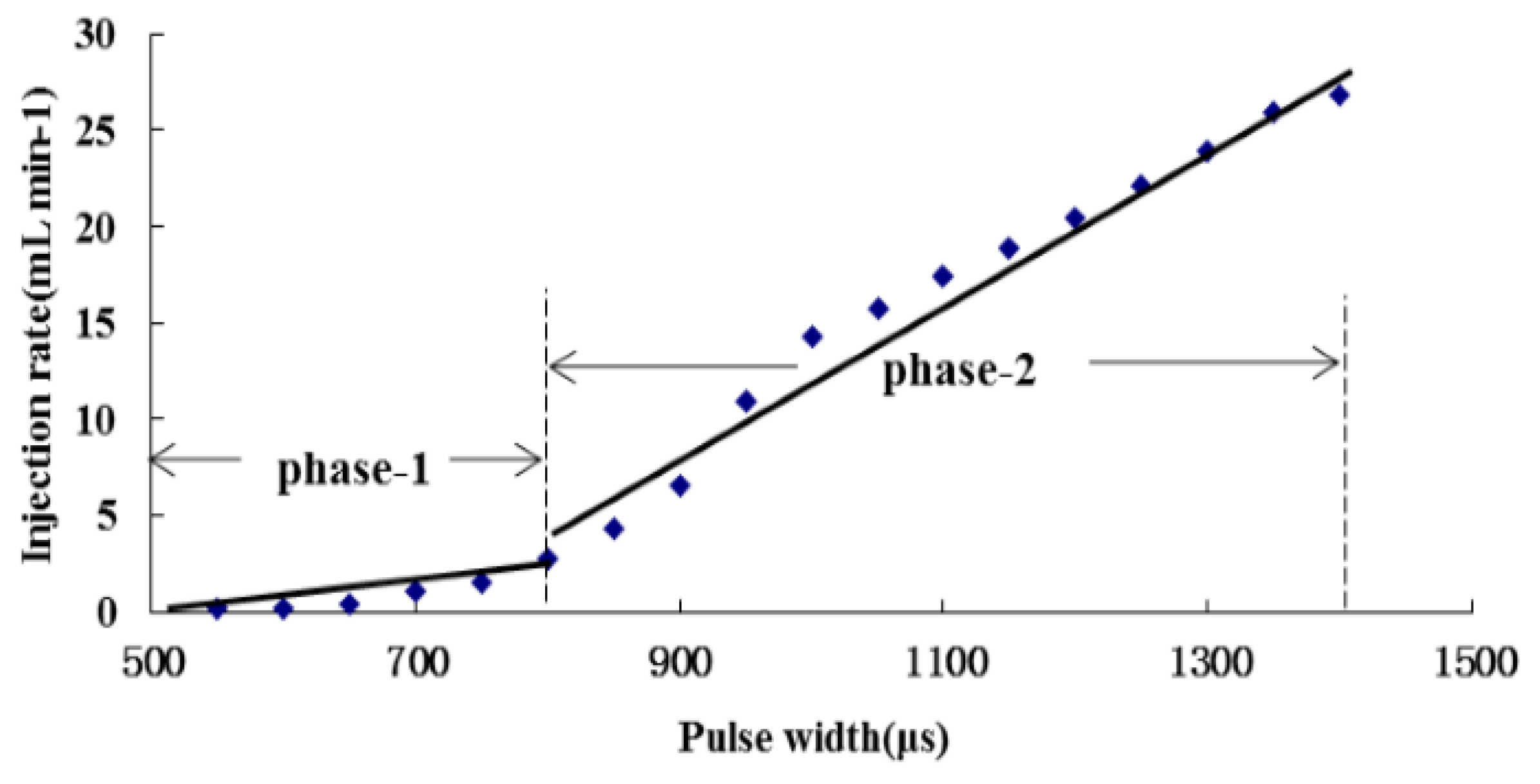
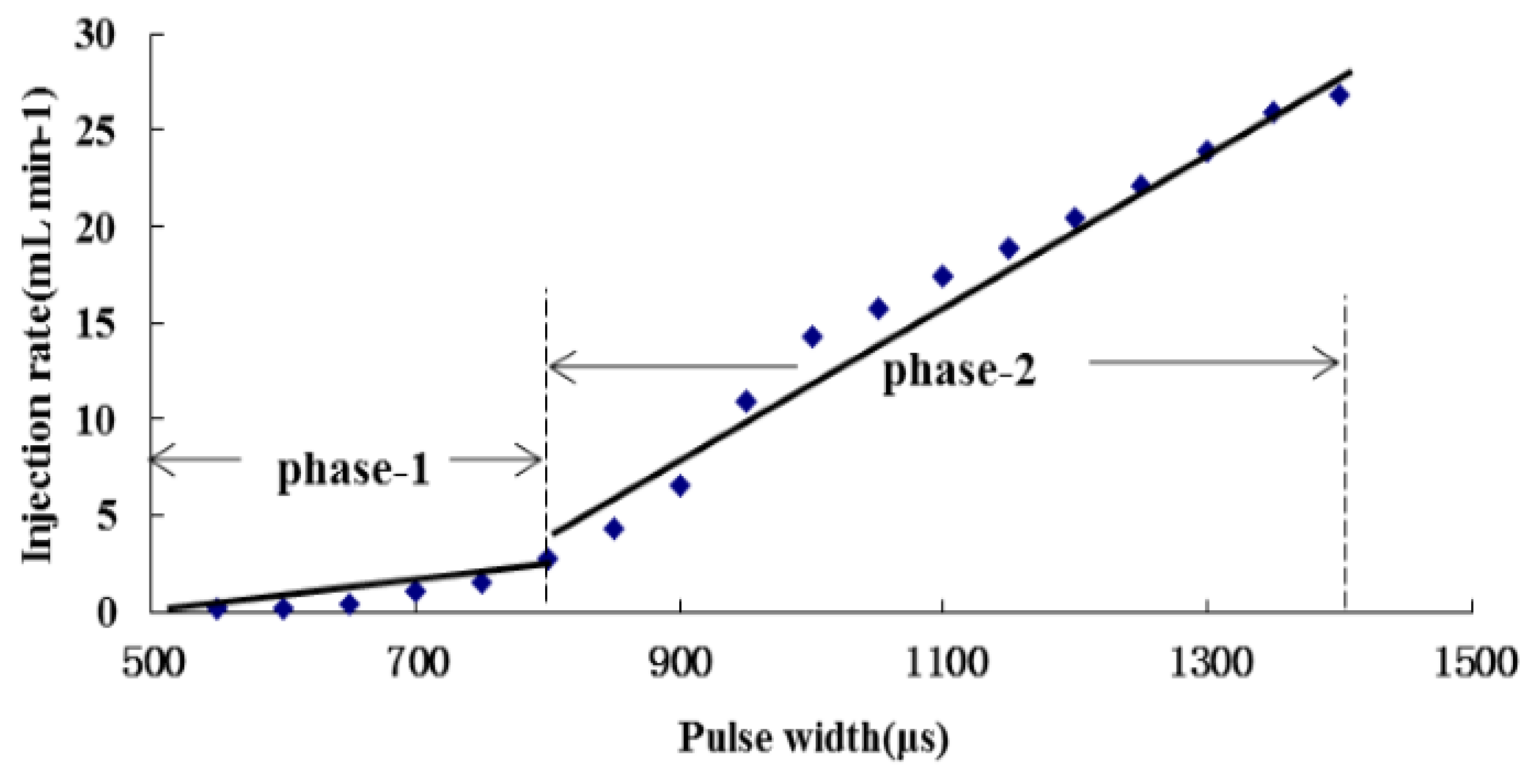
2.4. Calculating the Range of Chemical Injection Rate
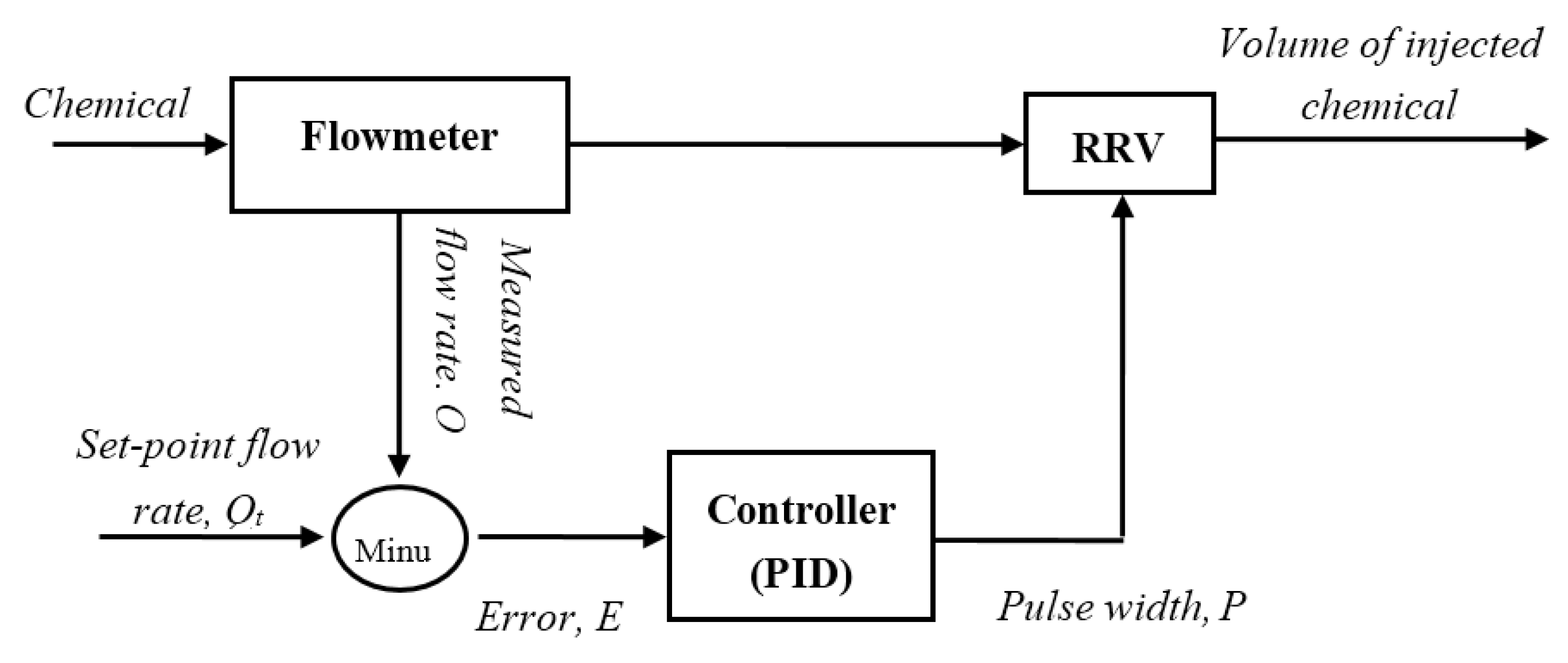
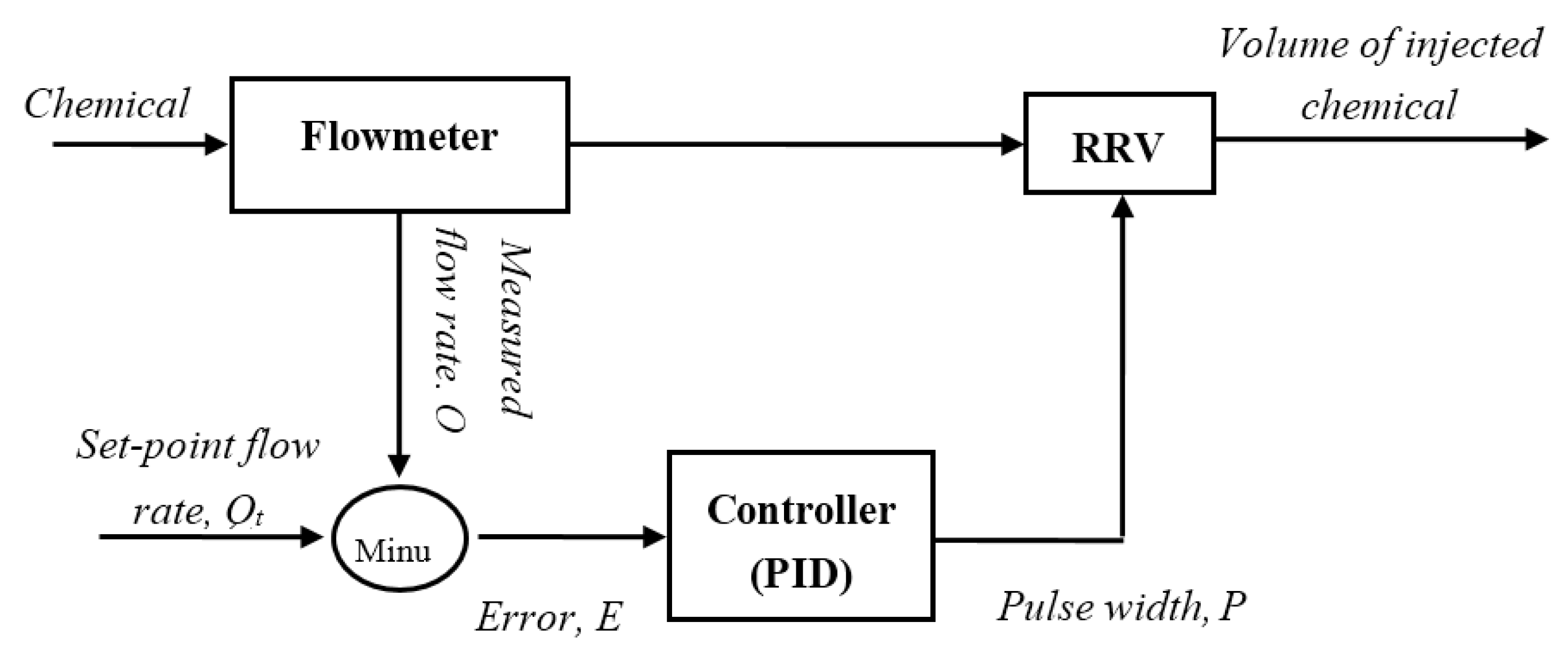
2.5. Closed-Loop Control
2.6. Experimental Procedures
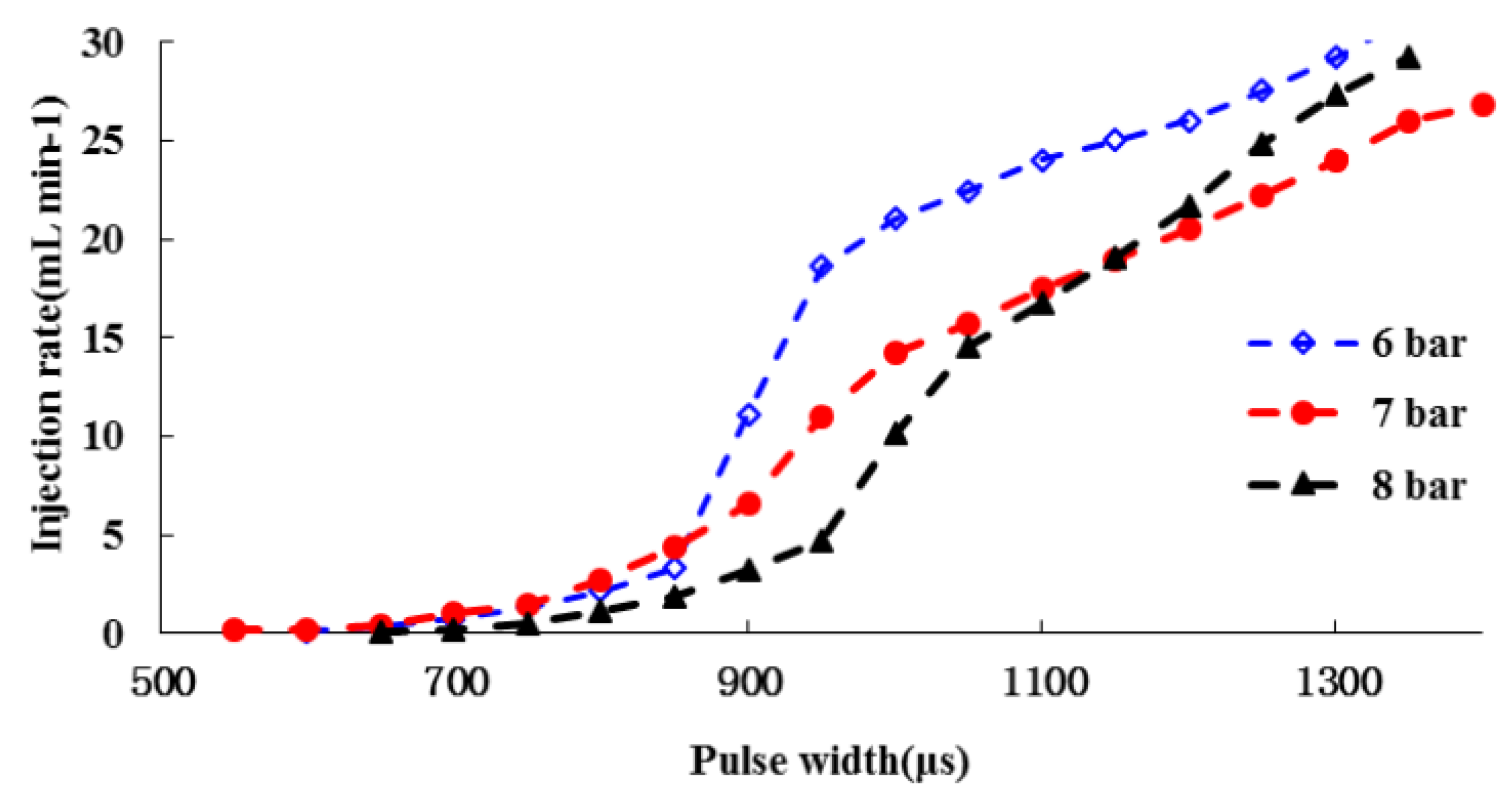
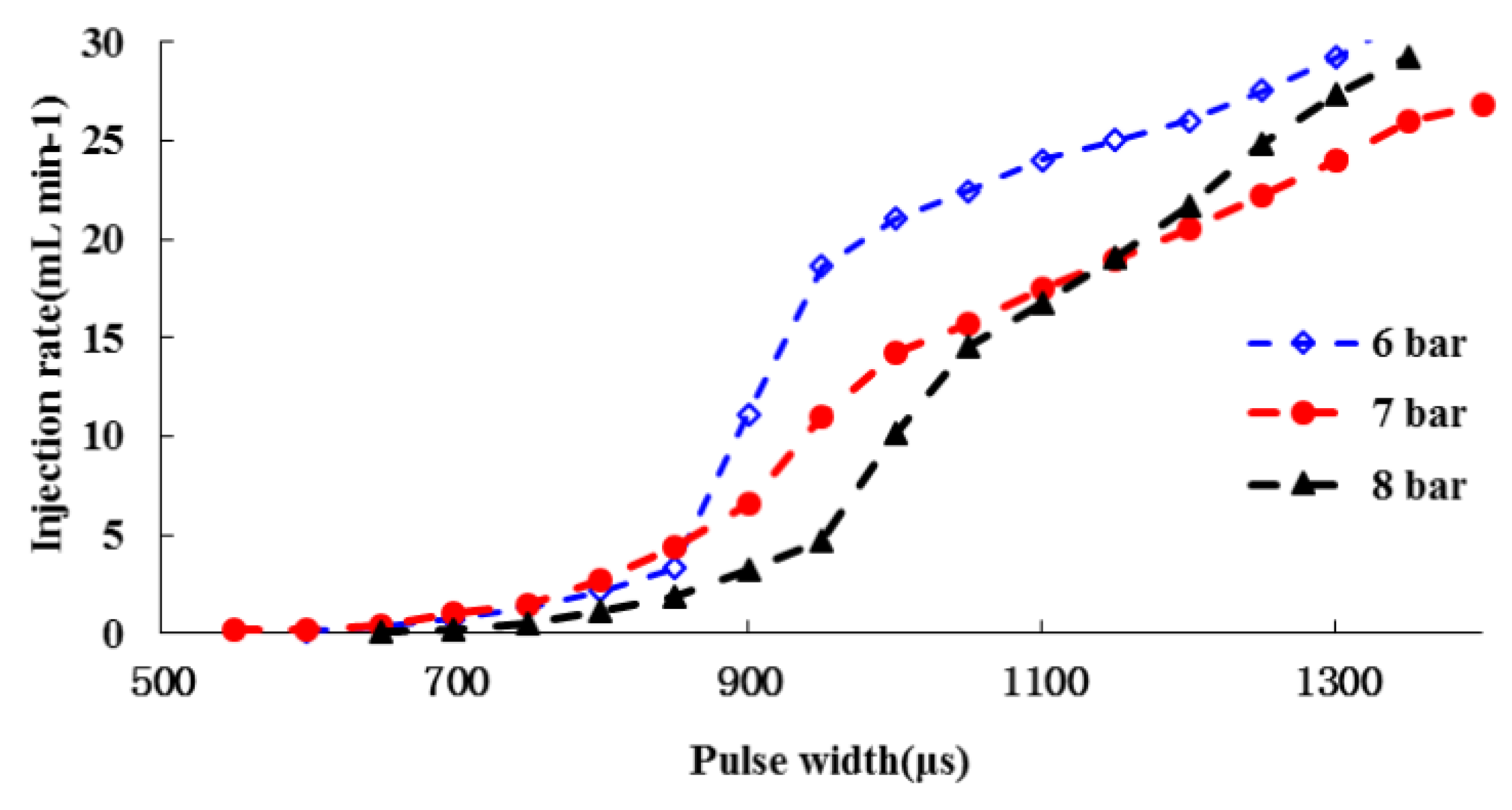
- The RRV was tested, and the relationship between the input pulse width P and the output chemical injection rate was investigated; in this experiment, the water pressure was set at 3 bar, and the air pressure for pushing the chemical was adjusted to 6, 7 and 8 bar to obtain the input-output characteristics of the RRV under three pressure differences and hence to compare the optimal operating conditions for the RRV.
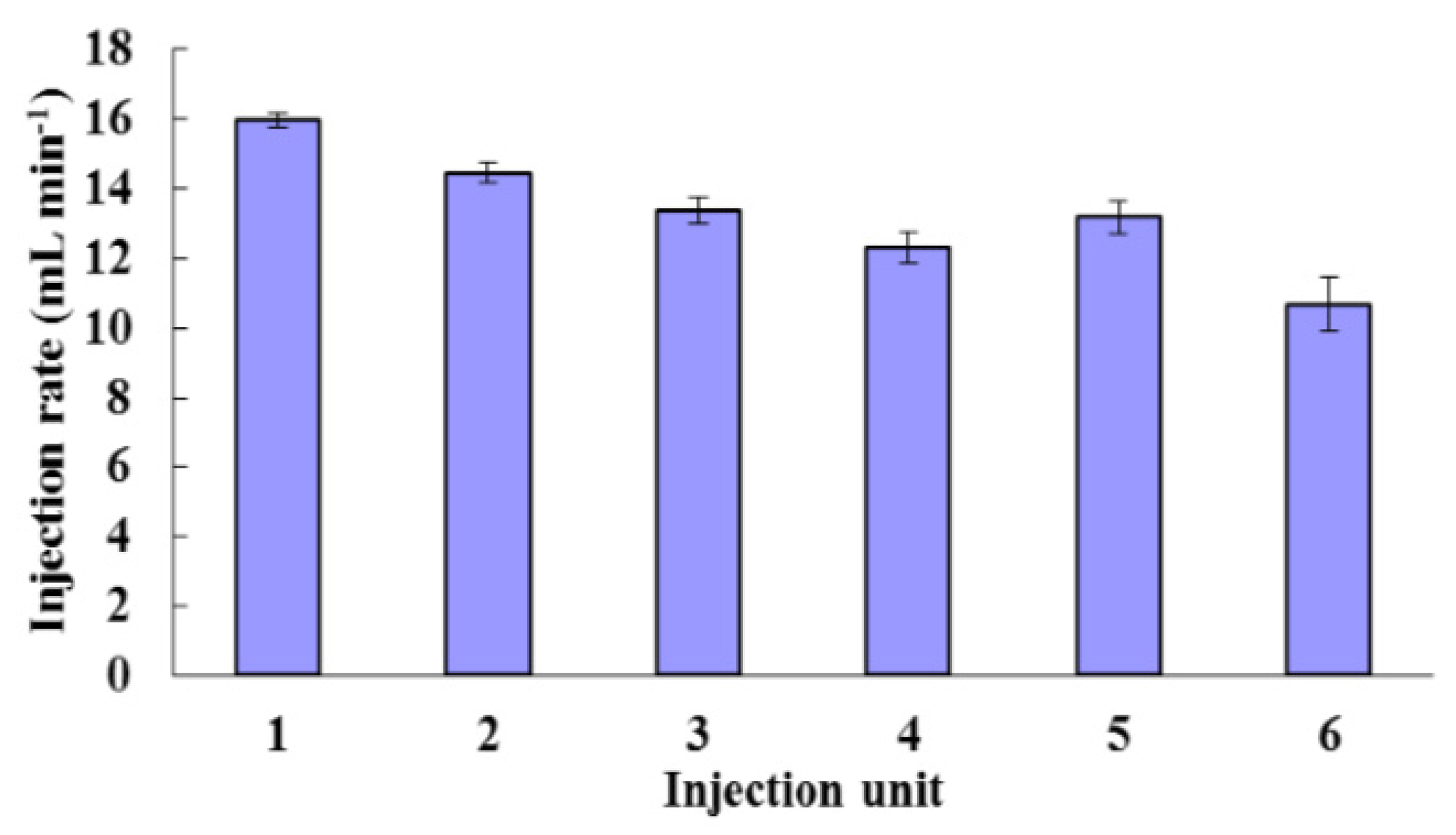
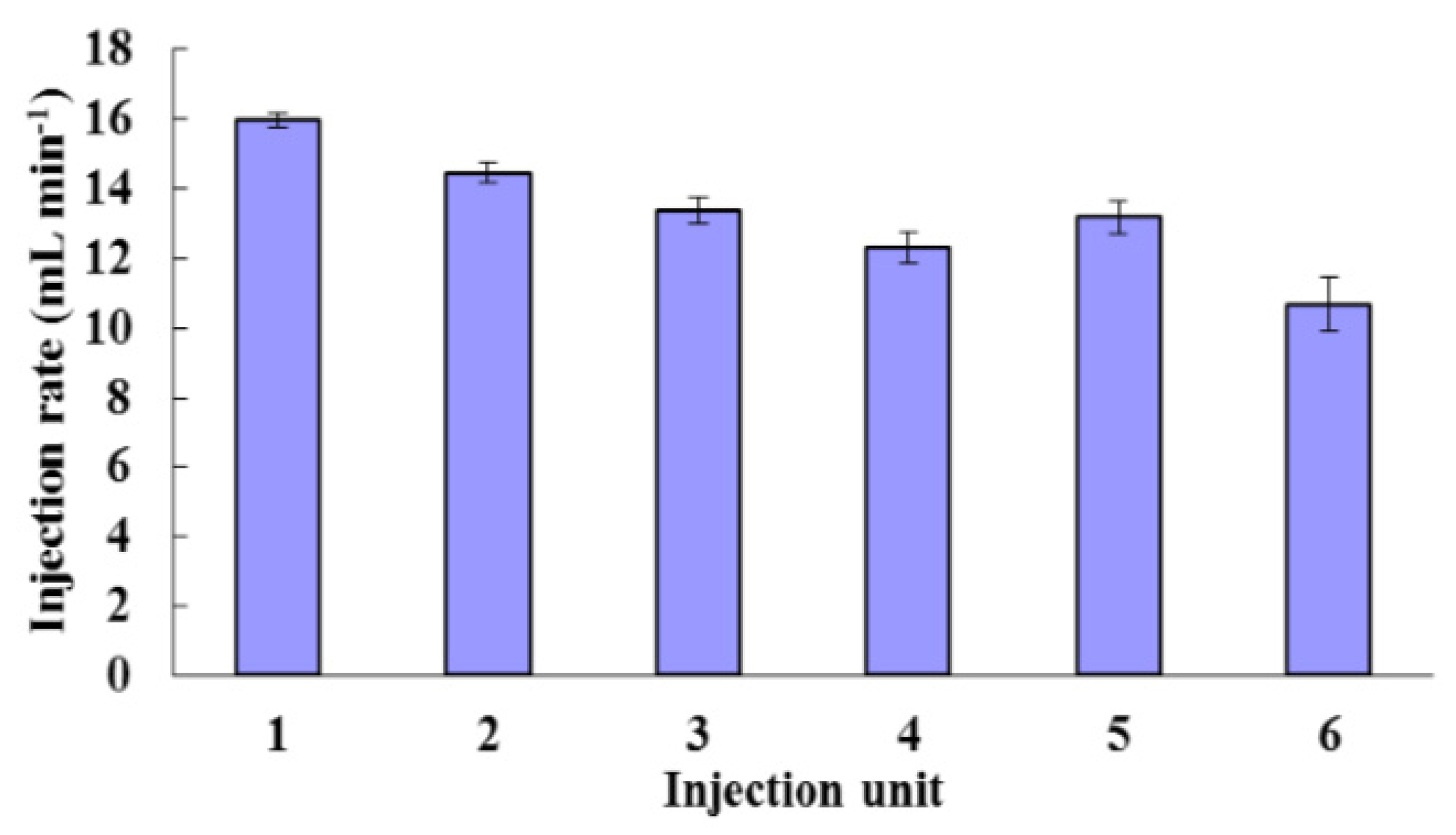
- The uniformity of six RRVs controlled by the same PWM signal (pulse width was 1000 μs) within one boom section was tested.
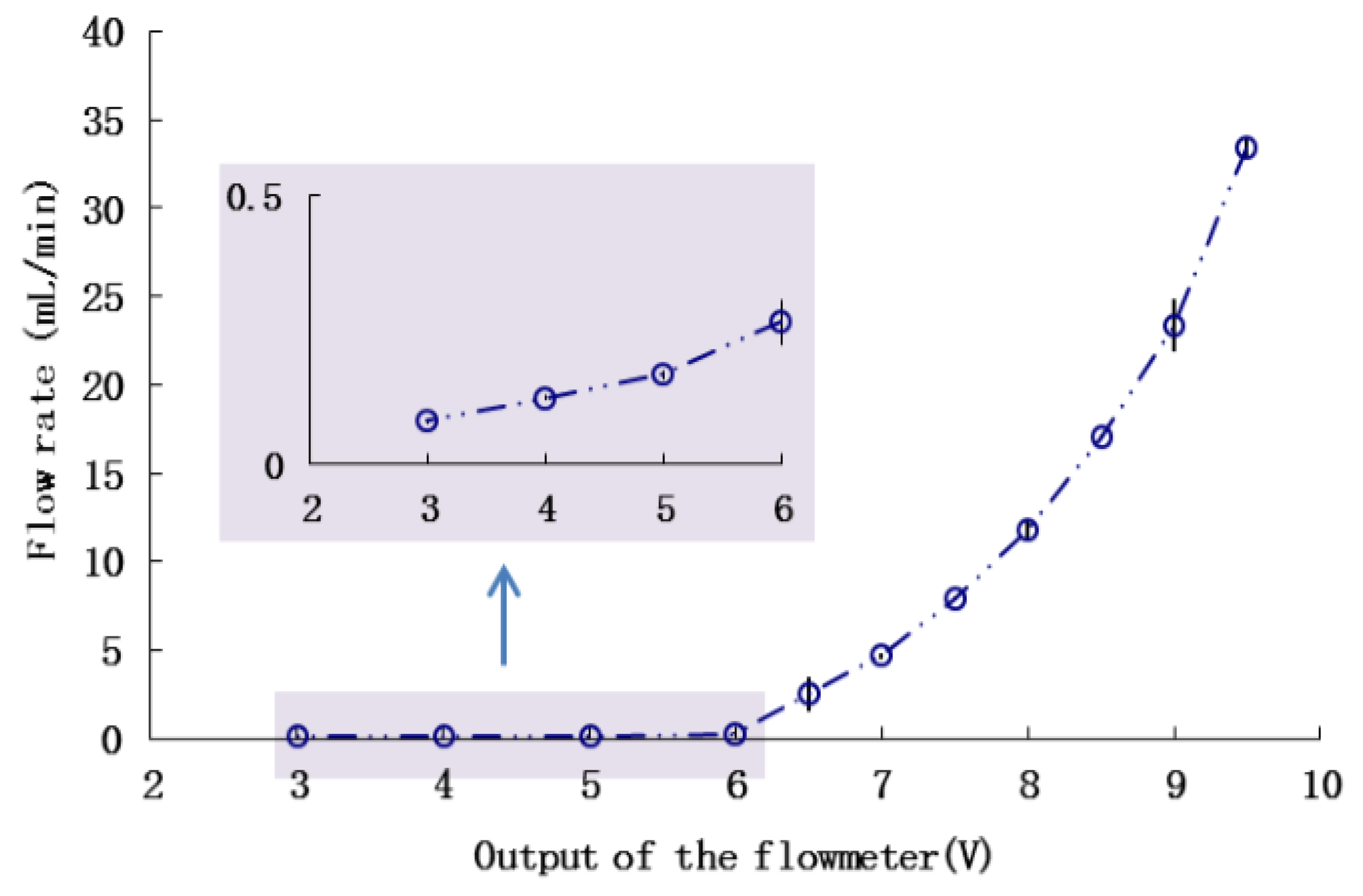
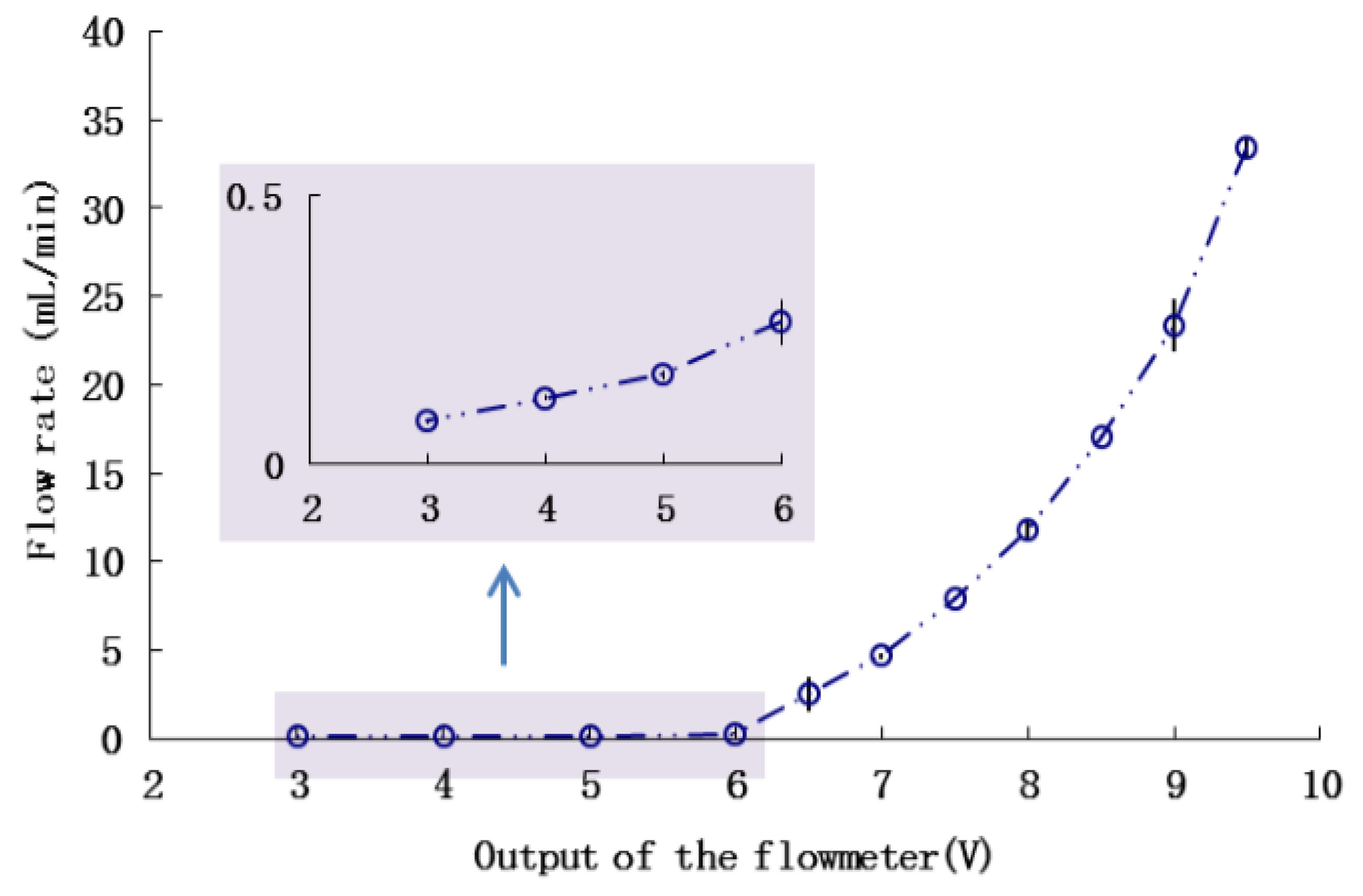
- The flowmeter was calibrated. The amount of injected chemical in 3 min was weighed three times, an the average value per minute was calculated as the injection rate.
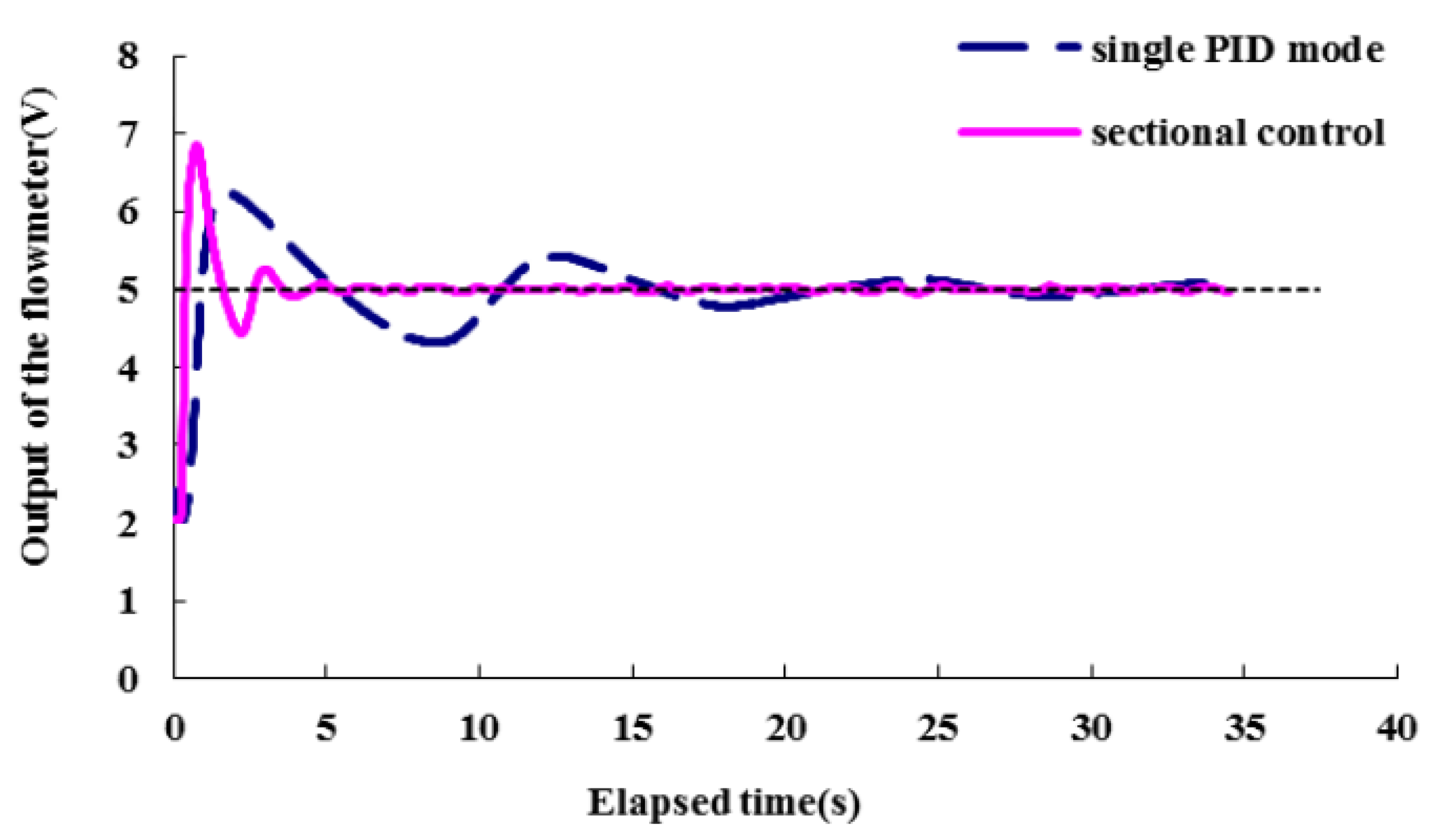
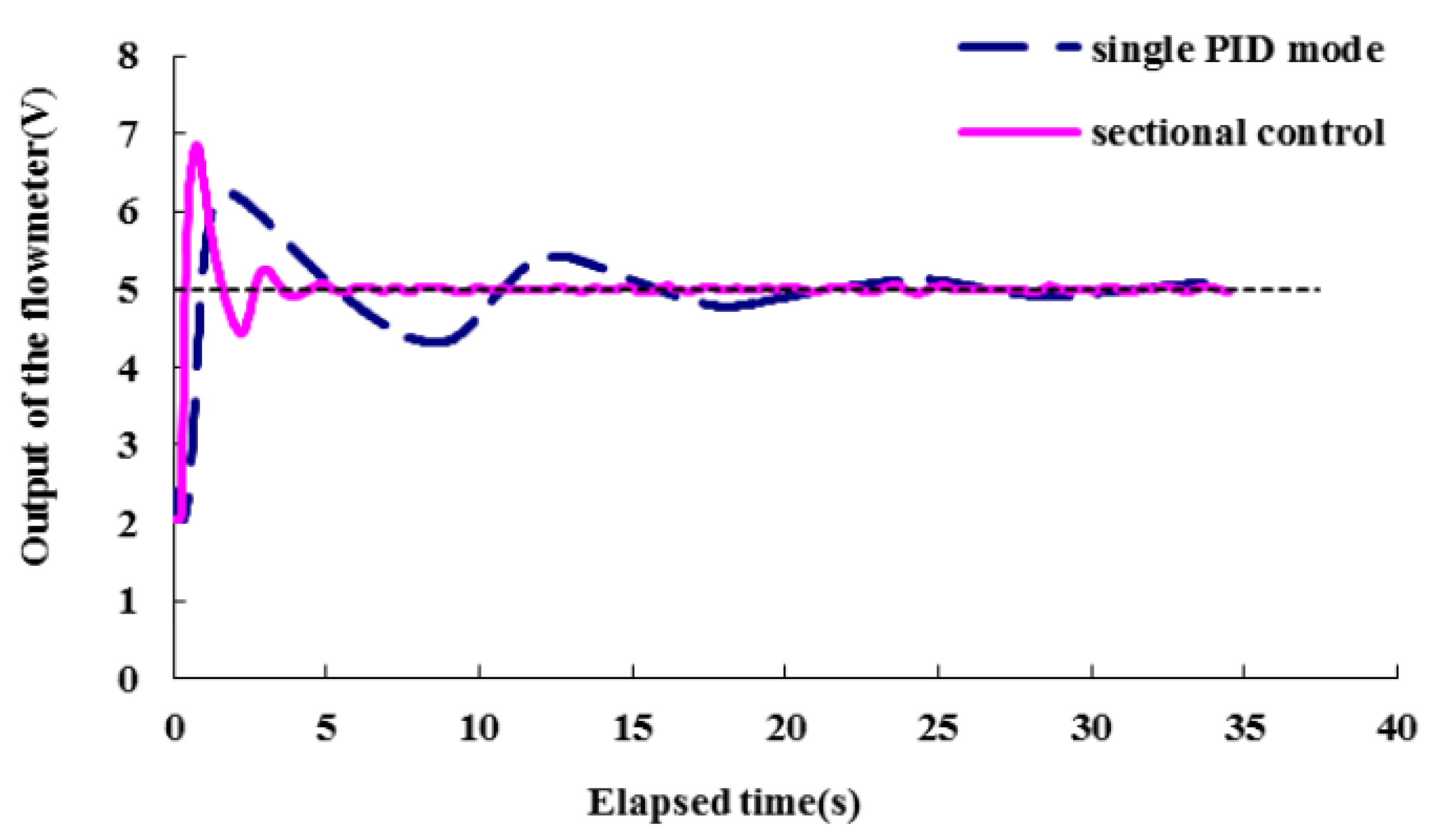
- A single PID module was applied in the control system at first. Subsequently a two-phase PID control strategy was used that managed to improve the control effect in accordance with the input-output characteristic of the RRV.
3. Results and Discussion
3.1. Tests of the RRV
3.2. Uniformity Test of Six RRVs within One Boom Section
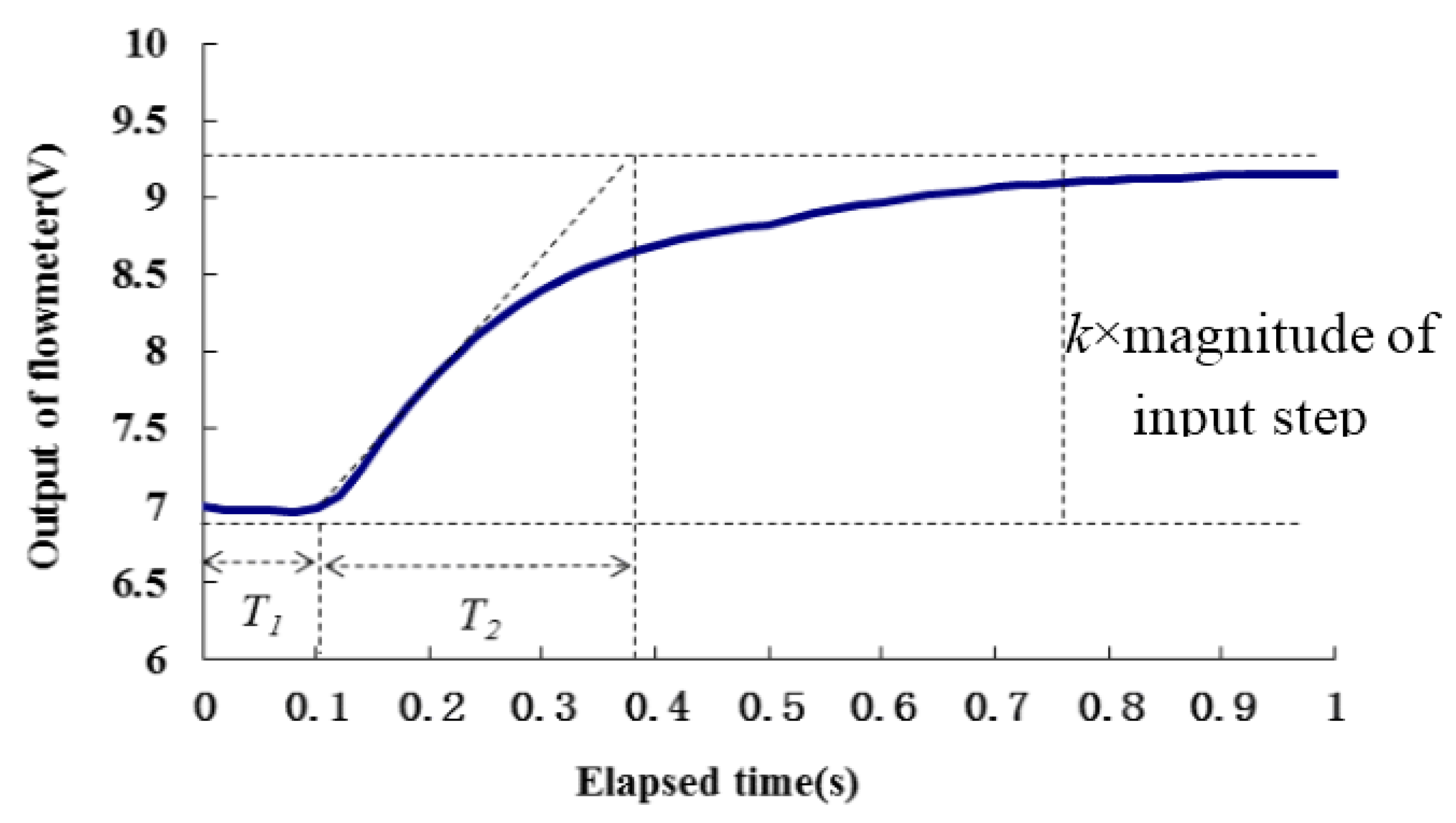
3.3. Calibration of the Thermodynamic Flowmeter
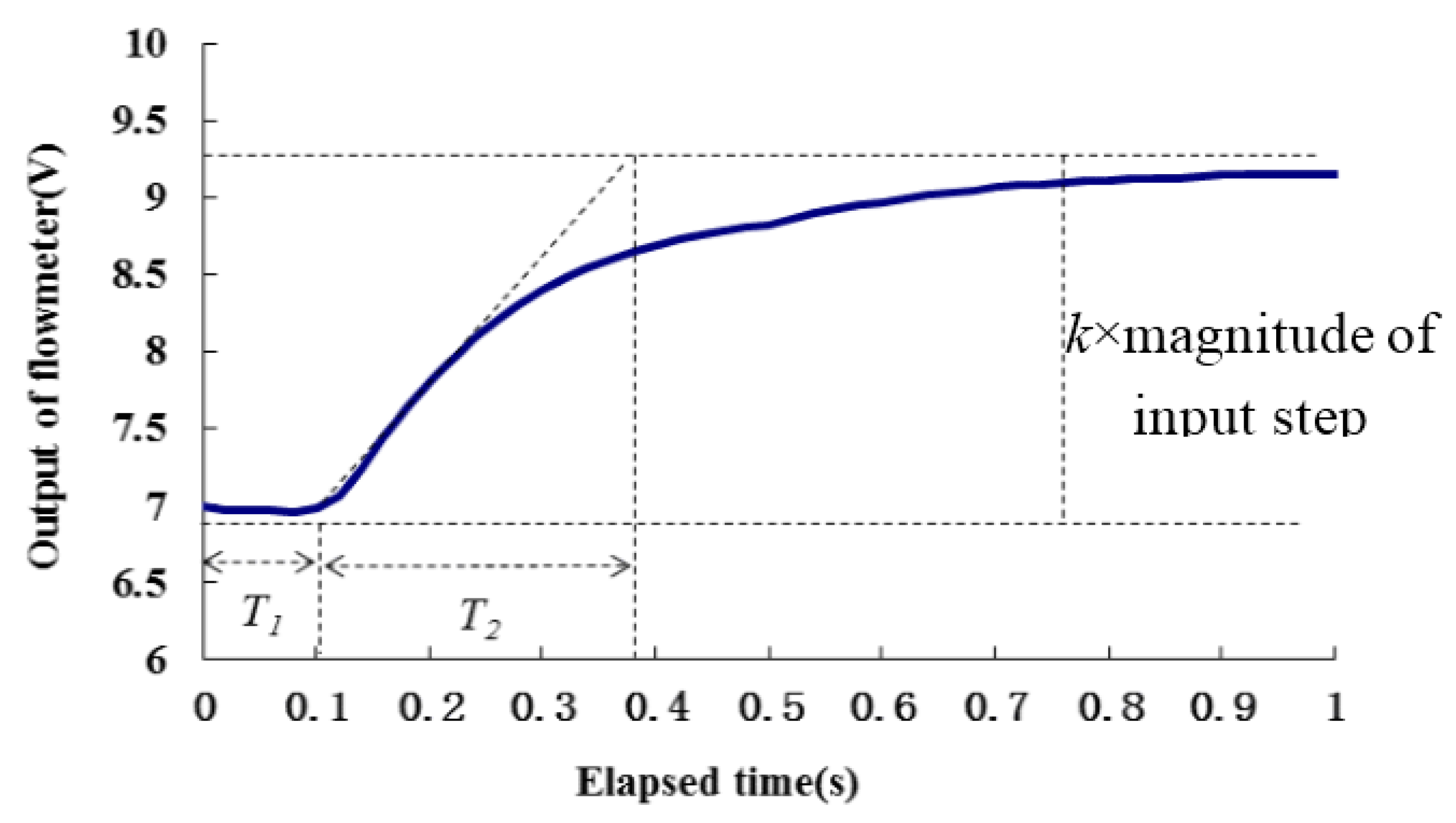
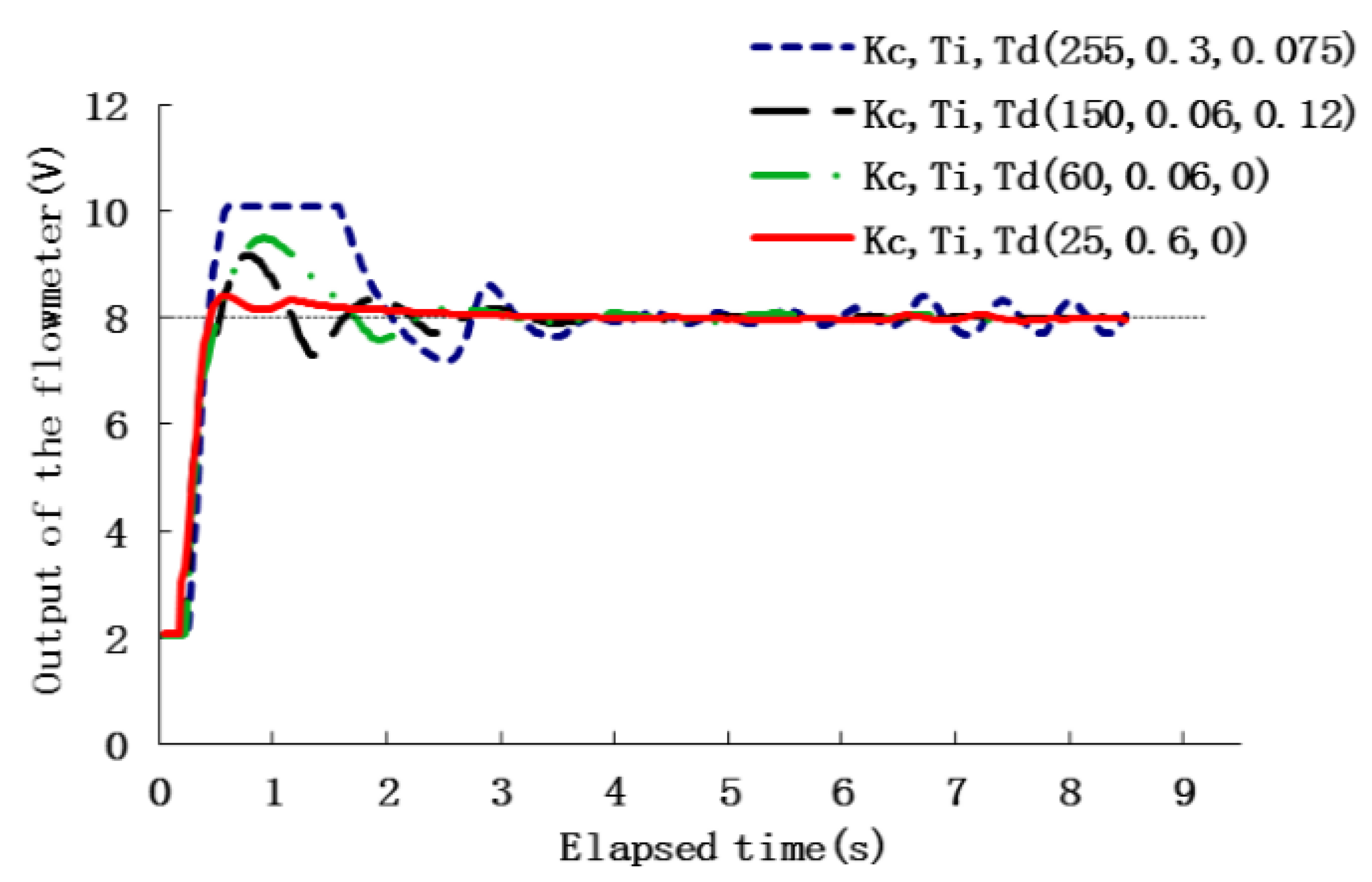
3.4. Tuning the PID Parameters
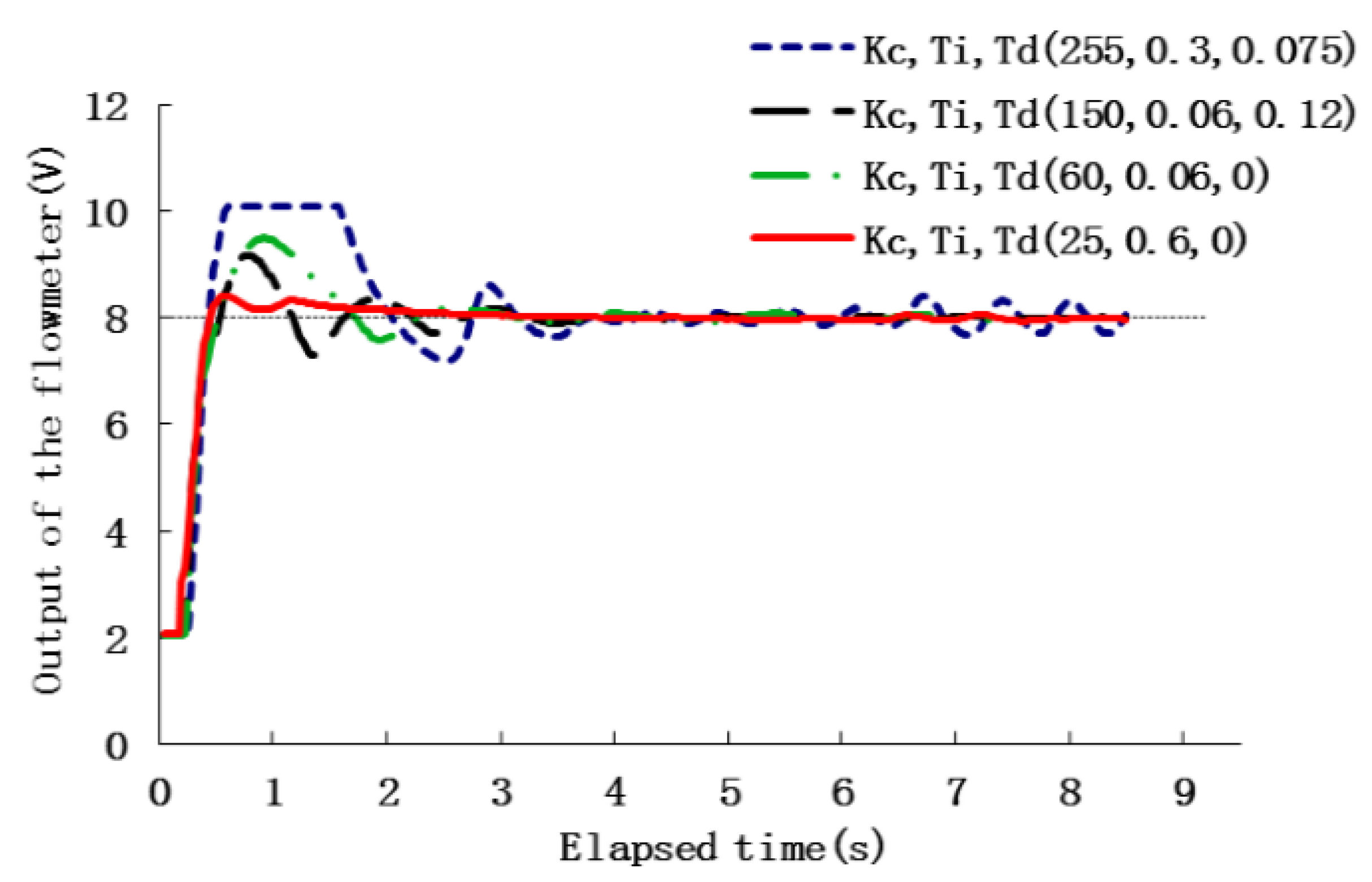
3.5. Two-Phase Control

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set-Point Voltage of Flowmeter (V) | Equivalent Flow Rate (mL/min) | Settling Time (s) | Steady-State Error (mL/min) | Maximum Overshoot (%) | Rise Time (s) | Phase NO. |
|---|---|---|---|---|---|---|
| 4 | 0.129 | 3.09 | 0.011 | 24.65 | 0.42 | 1 |
| 5 | 0.174 | 3.17 | 0.016 | 36.88 | 0.40 | 1 |
| 6 | 0.277 | 2.58 | 0.037 | 20.77 | 0.42 | 1 |
| 6.5 | 2.611 | 3.32 | 0.073 | 30.98 | 0.44 | 1 |
| 7 | 4.647 | 1.31 | 0.059 | 6.48 | 0.38 | 2 |
| 8 | 11.809 | 0.98 | 0.054 | 4.13 | 0.38 | 2 |
| 9 | 23.367 | 1.26 | 0.063 | 5.36 | 0.36 | 2 |
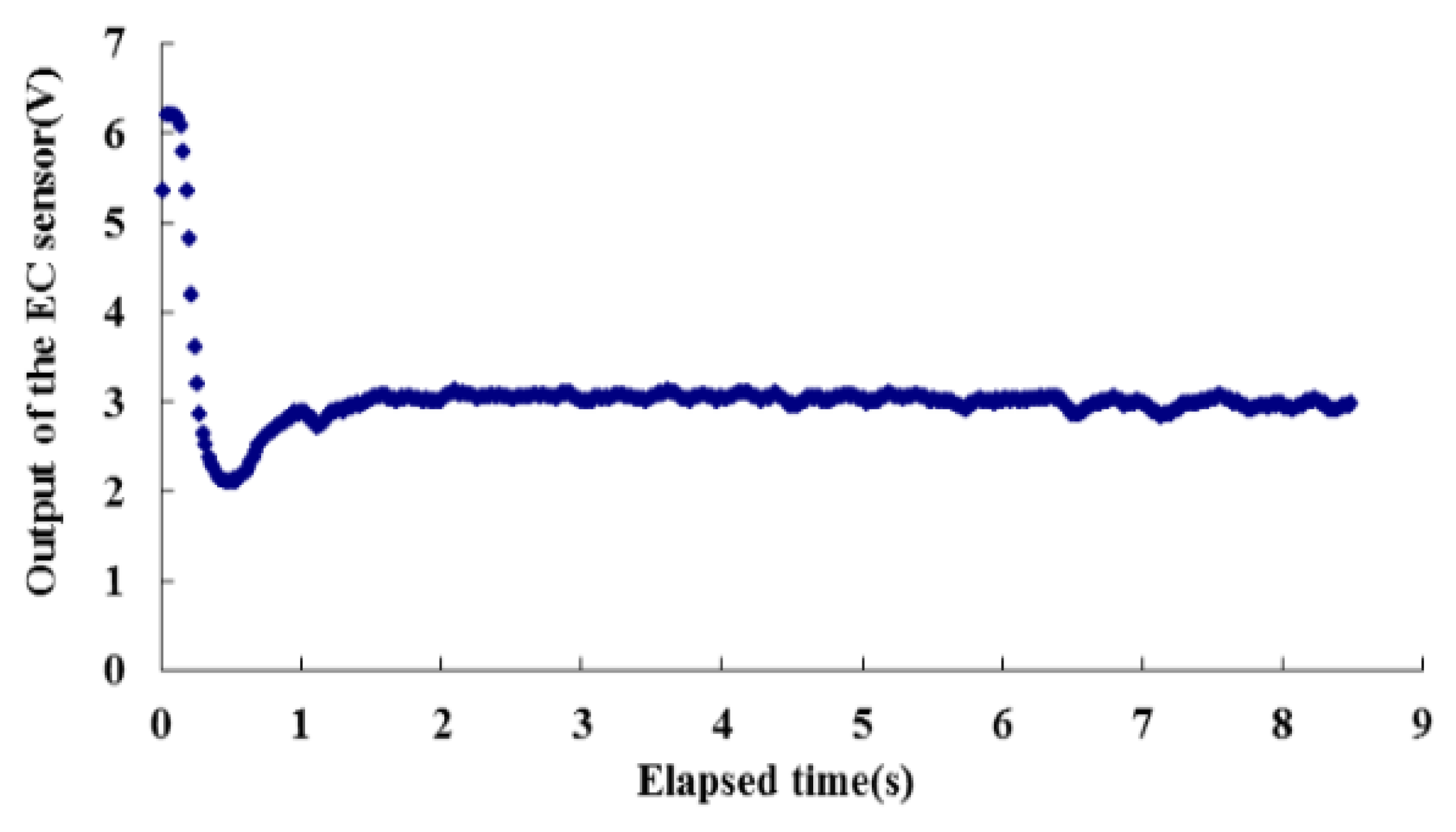
3.6. EC Measuring Method to Evaluate the Effect of the Closed-Loop Control

4. Conclusions
- The RRV used in the DNIS could inject chemical with flow rates ranging from 0.1 mL/min to more than 30 mL/min, which covers most spraying operations in the field.
- The thermodynamic flowmeter met the requirement of measuring wide range of flow rate, and it was independent of chemical viscosity. However, it was affected by the thermal conductivty of the liquid medium, so calibration for different chemicals was necessary before application.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gerhards, R.; Oebel, H. Practical experiences with a system for site-specific weed control in arable crops using real-time image analysis and GPS-controlled patch spraying. Weed Res. 2006, 46, 185–193. [Google Scholar] [CrossRef]
- Lutman, P.J.W.; Miller, P.C.H. Spatially Variable Herbicide Application Technology; Opportunities for Herbicide Minimisation and Protection of Beneficial Weeds; Home-Grown Cereals Authority: London, UK, 2007. [Google Scholar]
- Mohammadzamani, D.; Rashidi, M. Generating a Digital Management Map for Variable Rate Herbicide Application Usingthe Global Positioning System. Am.-Eurasian J. Sustain. Agric. 2009, 3, 101–106. [Google Scholar]
- Miller, P.C.H.; Butler Ellis, M.C. Effects of formulation on spray nozzle performance for applications from ground-based boom sprayers. Crop Protect. 2000, 19, 609–615. [Google Scholar] [CrossRef]
- Deng, W.; He, X.; Ding, W. Droplet size and spray pattern characteristics of PWM-based continuously variable spray. Int. J. Agric. Biol. Eng. 2009, 2, 8–18. [Google Scholar]
- GopalaPlillai, S.; Tian, L.; Zheng, J. Evaluation of a flow control system for site-specific herbicide applications. Trans. ASAE 1999, 42, 863–870. [Google Scholar] [CrossRef]
- Han, S.; Hendrickson, L.L.; Ni, B.; Zhang, Q. Modification and testing of a commercial sprayer with PWM solenoid s for precision spraying. Appl. Eng. Agric. 2001, 17, 591–594. [Google Scholar]
- Gebhardt, M.R.; Kliethermes, A.R.; Goering, C.E. Metering concentrated pesticides. Trans. ASAE 1984, 27, 18–23. [Google Scholar] [CrossRef]
- Frost, A.R. A pesticide injection metering system for use on agricultural spraying machines. J. Agric. Eng. Res. 1990, 46, 55–70. [Google Scholar] [CrossRef]
- Lammers, P.S.; Vondricka, J. Precision Crop Protection—The Challenge and Use of Heterogeneity; Springer: Dordrecht, The Netherlands, 2010. [Google Scholar]
- Vondricka, J. Study on the Process of Direct Nozzle Injection for Real-Time Site-Specific Pesticide Application. Ph.D. Thesis, University of Bonn, Bonn, Germany, 2008. [Google Scholar]
- Vondricka, J.; Lammers, P.S. Measurement of mixture homogeneity in direct injection systems. Trans. ASABE 2009, 52, 61–66. [Google Scholar] [CrossRef]
- Doerpmund, M.; Cai, X.; Walgenbach, M.; Vondricka, J.; Shuzle Lammers, P. Assessing the cleanability of a direct nozzle injection system. Biosyst. Eng. 2011, 110, 49–56. [Google Scholar] [CrossRef]
- Doerpmund, M.; Cai, X.; Walgenbach, M.; Vondricka, J.; Shuzle Lammers, P. The challenge of cleaning direct-injection systems for pesticide application. Trans. ASABE 2012, 55, 1643–1650. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, X.; Walgenbach, M.; Doerpmond, M.; Schulze Lammers, P.; Sun, Y. Closed-Loop Control of Chemical Injection Rate for a Direct Nozzle Injection System. Sensors 2016, 16, 127. https://doi.org/10.3390/s16010127
Cai X, Walgenbach M, Doerpmond M, Schulze Lammers P, Sun Y. Closed-Loop Control of Chemical Injection Rate for a Direct Nozzle Injection System. Sensors. 2016; 16(1):127. https://doi.org/10.3390/s16010127
Chicago/Turabian StyleCai, Xiang, Martin Walgenbach, Malte Doerpmond, Peter Schulze Lammers, and Yurui Sun. 2016. "Closed-Loop Control of Chemical Injection Rate for a Direct Nozzle Injection System" Sensors 16, no. 1: 127. https://doi.org/10.3390/s16010127
APA StyleCai, X., Walgenbach, M., Doerpmond, M., Schulze Lammers, P., & Sun, Y. (2016). Closed-Loop Control of Chemical Injection Rate for a Direct Nozzle Injection System. Sensors, 16(1), 127. https://doi.org/10.3390/s16010127