
Modeling Sensor Reliability in Fault Diagnosis Based on Evidence Theory

Abstract
:1. Introduction
2. Preliminaries
2.1. Dempster–Shafer Evidence Theory
2.2. Weighted Average Combination Method [39]
2.3. Deng Entropy
2.4. Fan and Zuo’s Method
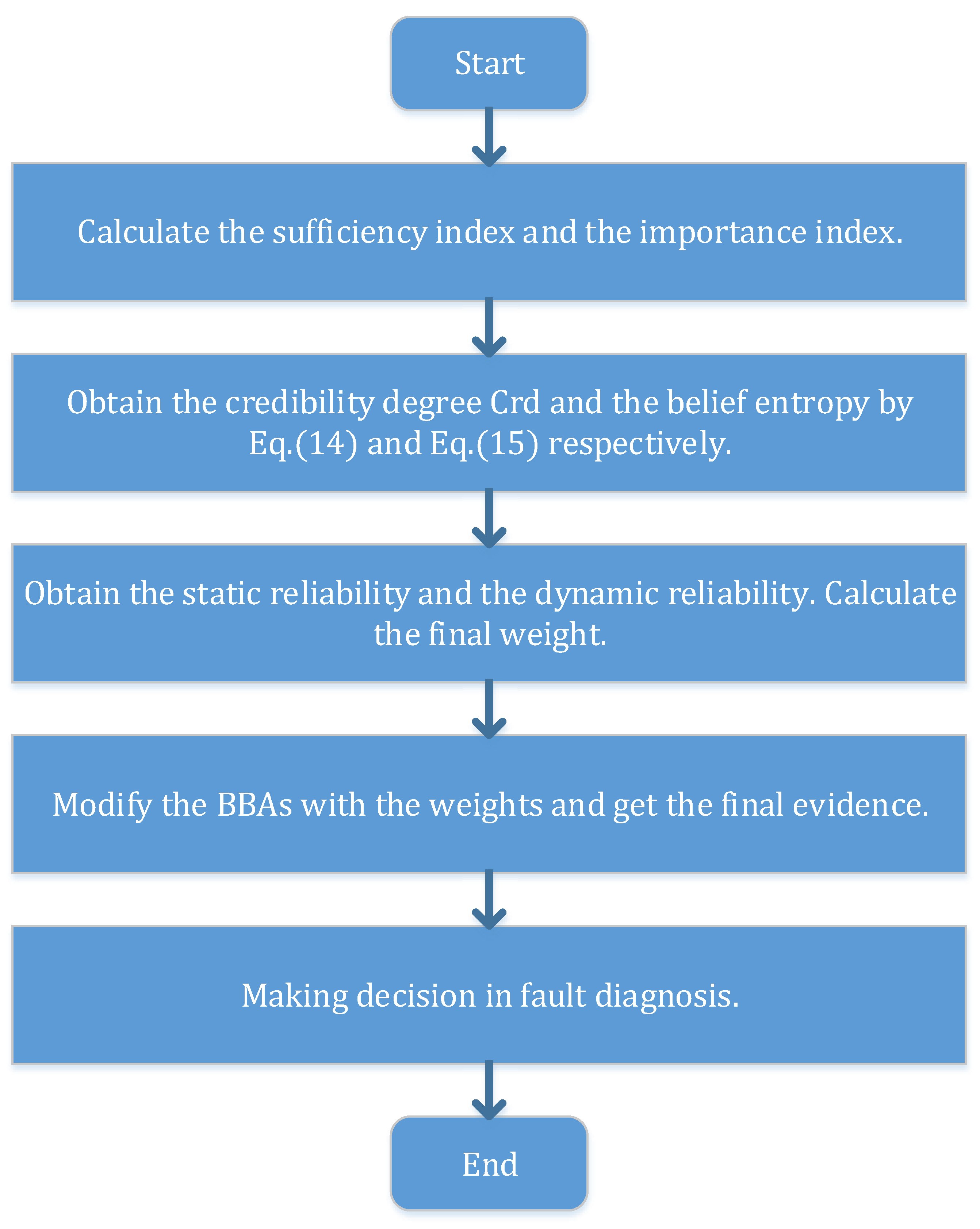
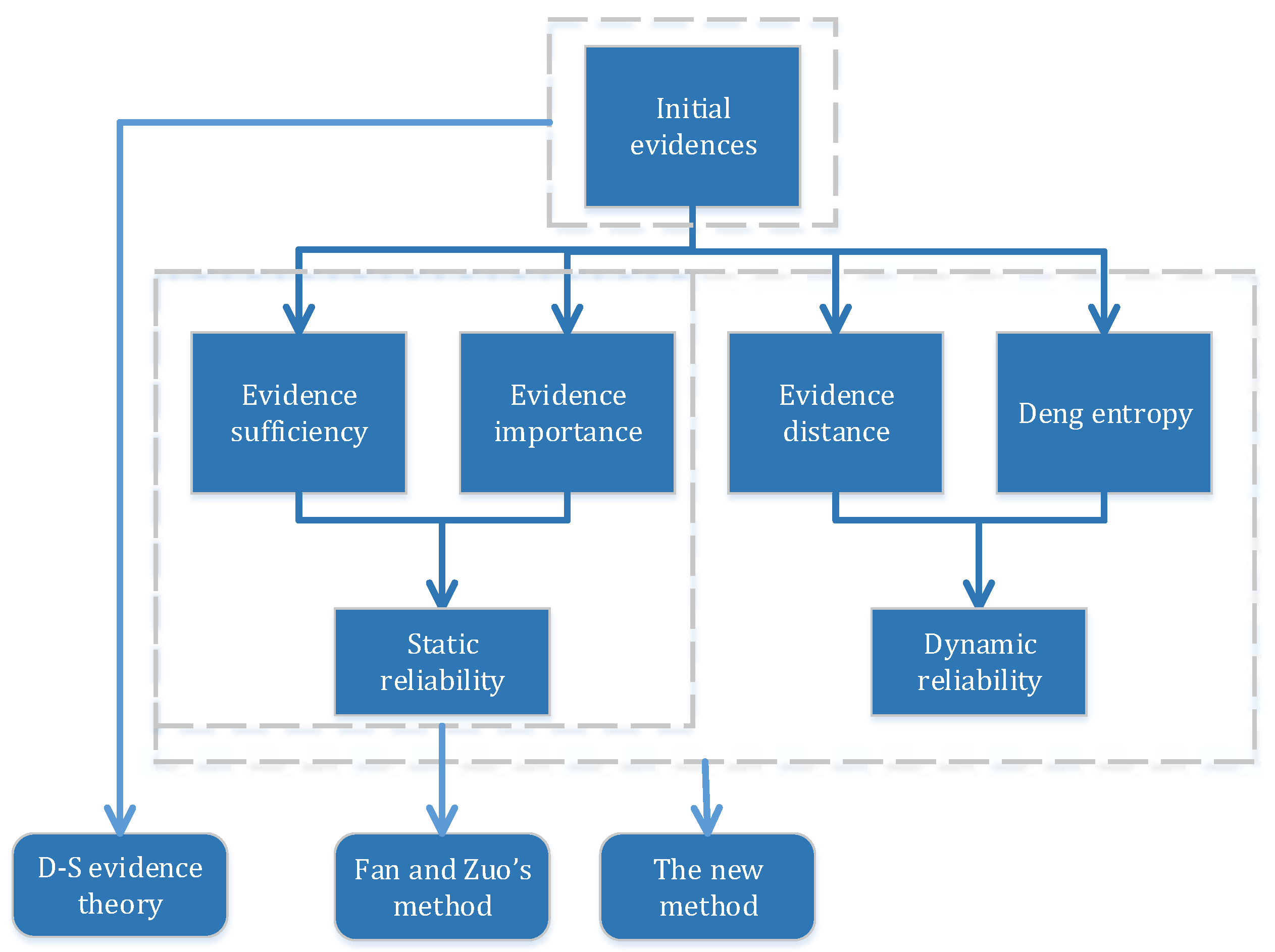
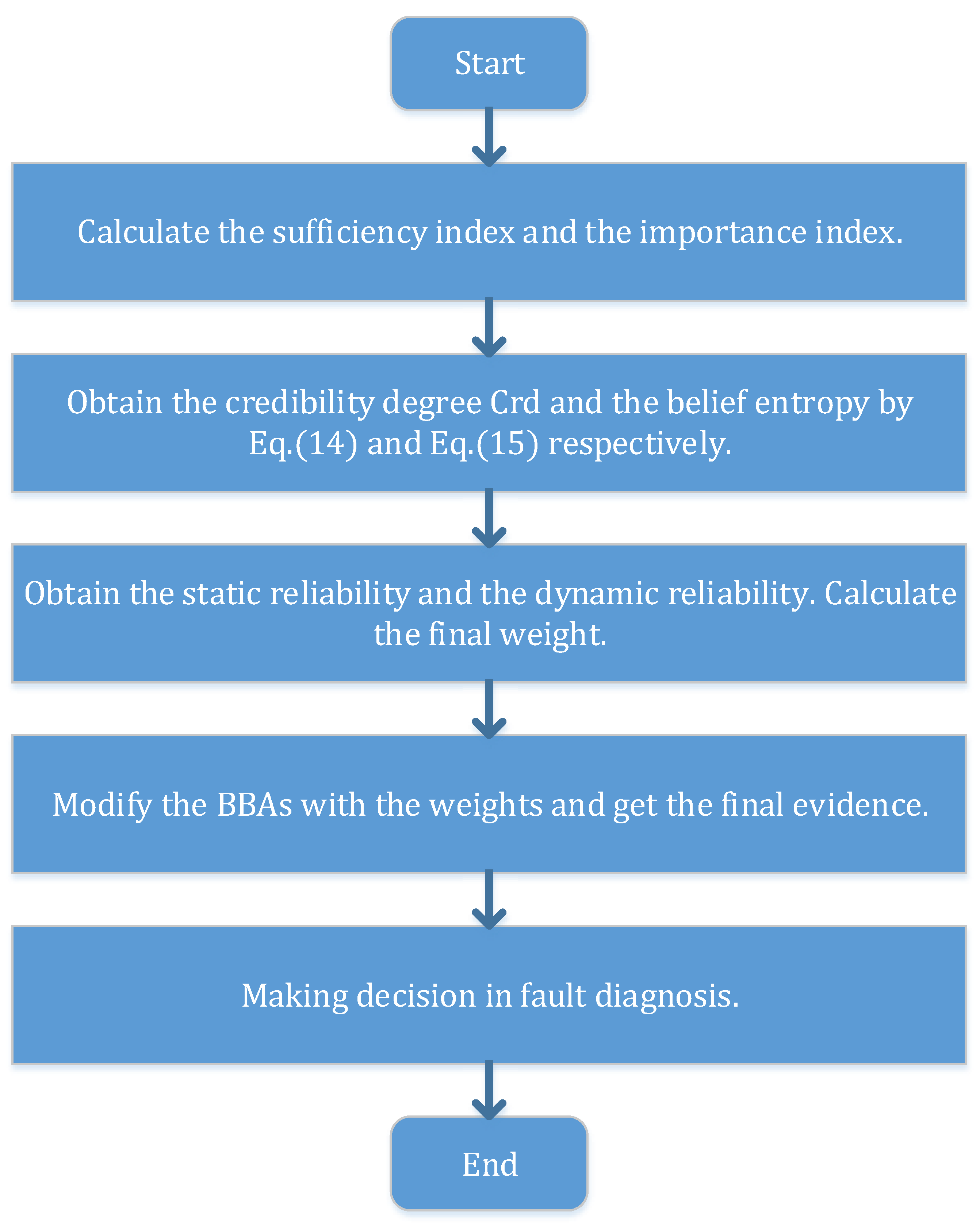
3. The Proposed Method
3.1. Static Reliability
3.2. Dynamic Reliability
3.3. Comprehensive Reliability of Sensor
4. Application

{kind=link}
{kind=link}
| θ | ||||
|---|---|---|---|---|
| 0.6 | 0.1 | 0.1 | 0.2 | |
| 0.05 | 0.8 | 0.05 | 0.1 | |
| 0.7 | 0.1 | 0.1 | 0.1 |
| θ | ||||
|---|---|---|---|---|
| D-S evidence theory | 0.4519 | 0.5048 | 0.0336 | 0.0096 |
| Fan and Zuo’s method [43] | 0.8119 | 0.1096 | 0.0526 | 0.0259 |
| The proposed method | 0.8948 | 0.0739 | 0.0241 | 0.0072 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xu, L.; Krzyzak, A.; Suen, C.Y. Methods of combining multiple classifiers and their applications to handwriting recognition. IEEE Trans. Syst. Man Cybern. 1992, 22, 418–435. [Google Scholar] [CrossRef]
- Lu, X.; Wang, Y.; Jain, A.K. Combining classifiers for face recognition. In Proceedings of the 2003 International Conference on Multimedia and Expo, Baltimore, MD, USA, 6–9 July 2003; Volume 3, pp. 13–16.
- García, F.; Jiménez, F.; Anaya, J.J.; Armingol, J.M.; Naranjo, J.E.; de la Escalera, A. Distributed pedestrian detection alerts based on data fusion with accurate localization. Sensors 2013, 13, 11687–11708. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Liu, P.; Sun, Y.; Wen, C. Fault diagnosis based on the updating strategy of interval-valued belief structures. Chin. J. Electron. 2014, 23, 753–760. [Google Scholar]
- Walley, P.; de Cooman, G. A Behavioural Model For Linguistic Uncertainty. Inf. Sci. 2001, 134, 1–37. [Google Scholar] [CrossRef]
- Deng, Y.; Liu, Y.; Zhou, D. An Improved Genetic Algorithm with Initial Population Strategy for Symmetric TSP. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Jones, R.W.; Lowe, A.; Harrison, M. A framework for intelligent medical diagnosis using the theory of evidence. Knowl. Based Syst. 2002, 15, 77–84. [Google Scholar] [CrossRef]
- Jiang, W.; Yang, Y.; Luo, Y.; Qin, X. Determining Basic Probability Assignment Based on the Improved Similarity Measures of Generalized Fuzzy Numbers. Int. J. Comput. Commun. Control 2015, 10, 333–347. [Google Scholar] [CrossRef]
- Liu, H.C.; Liu, L.; Lin, Q.L. Fuzzy failure mode and effects analysis using fuzzy evidential reasoning and belief rule-based methodology. IEEE Trans. Reliab. 2013, 62, 23–36. [Google Scholar] [CrossRef]
- Jiang, W.; Luo, Y.; Qin, X.; Zhan, J. An improved method to rank generalized fuzzy numbers with different left heights and right heights. J. Intell. Fuzzy Syst. 2015, 28, 2343–2355. [Google Scholar] [CrossRef]
- Deng, Y. A Threat Assessment Model under Uncertain Environment. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Mardani, A.; Jusoh, A.; Zavadskas, E.K. Fuzzy multiple criteria decision-making techniques and applications—Two decades review from 1994 to 2014. Expert Syst. Appl. 2015, 42, 4126–4148. [Google Scholar] [CrossRef]
- Cai, B.; Liu, Y.; Liu, Z.; Tian, X.; Zhang, Y.; Ji, R. Application of Bayesian Networks in Quantitative Risk Assessment of Subsea Blowout Preventer Operations. Risk Anal. 2013, 33, 1293–1311. [Google Scholar] [CrossRef] [PubMed]
- Deng, X.; Hu, Y.; Deng, Y.; Mahadevan, S. Supplier selection using AHP methodology extended by D numbers. Expert Syst. Appl. 2014, 41, 156–167. [Google Scholar] [CrossRef]
- Dempster, A.P. Upper and lower probabilities induced by a multivalued mapping. In Classic Works of the Dempster-Shafer Theory of Belief Functions; Yager, R.R., Liu, L., Eds.; Springer: Berlin, Germany, 1966; Volume 38, pp. 57–72. [Google Scholar]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976; Volume 1. [Google Scholar]
- Al-Ani, A.; Deriche, M. A new technique for combining multiple classifiers using the Dempster-Shafer theory of evidence. J. Artif. Intell. Res. 2002, 17, 333–361. [Google Scholar]
- Zhao, Z.S.; Zhang, L.; Zhao, M.; Hou, Z.G.; Zhang, C.S. Gabor face recognition by multi-channel classifier fusion of supervised kernel manifold learning. Neurocomputing 2012, 97, 398–404. [Google Scholar] [CrossRef]
- Moosavian, A.; Khazaee, M.; Najafi, G.; Kettner, M.; Mamat, R. Spark plug fault recognition based on sensor fusion and classifier combination using Dempster–Shafer evidence theory. Appl. Acoust. 2015, 93, 120–129. [Google Scholar] [CrossRef]
- Han, D.Q.; Han, C.Z.; Yang, Y. Multi-class SVM classifiers fusion based on evidence combination. In Proceedings of the International Conference on Wavelet Analysis and Pattern Recognition, Beijing, China, 2–4 November 2007; Volume 2, pp. 579–584.
- Le, C.A.; Huynh, V.N.; Shimazu, A.; Nakamori, Y. Combining classifiers for word sense disambiguation based on Dempster–Shafer theory and OWA operators. Data Knowl. Eng. 2007, 63, 381–396. [Google Scholar] [CrossRef]
- Wang, X.; Huang, J.Z.; Wang, X.; Huang, J.Z. Editorial: Uncertainty in learning from big data. Fuzzy Sets Syst. 2015, 258, 1–4. [Google Scholar] [CrossRef]
- Deng, Y.; Mahadevan, S.; Zhou, D. Vulnerability assessment of physical protection systems: A bio-inspired approach. Int. J. Unconv. Comput. 2015, 11, 227–243. [Google Scholar]
- Molina, C.; Yoma, N.B.; Wuth, J.; Vivanco, H. ASR based pronunciation evaluation with automatically generated competing vocabulary and classifier fusion. Speech Commun. 2009, 51, 485–498. [Google Scholar] [CrossRef]
- Zhang, X. Interactive patent classification based on multi-classifier fusion and active learning. Neurocomputing 2014, 127, 200–205. [Google Scholar] [CrossRef]
- Rikhtegar, N.; Mansouri, N.; Oroumieh, A.A.; Yazdani-Chamzini, A.; Zavadskas, E.K.; Kildiené, S. Environmental impact assessment based on group decision-making methods in mining projects. Econ. Res. 2014, 27, 378–392. [Google Scholar] [CrossRef]
- Cai, B.; Liu, Y.; Fan, Q.; Zhang, Y.; Liu, Z.; Yu, S.; Ji, R. Multi-source information fusion based fault diagnosis of ground-source heat pump using Bayesian network. Appl. Energy 2014, 114, 1–9. [Google Scholar] [CrossRef]
- Deng, X.; Hu, Y.; Deng, Y.; Mahadevan, S. Environmental impact assessment based on D numbers. Expert Syst. Appl. 2014, 41, 635–643. [Google Scholar] [CrossRef]
- Liu, H.C.; You, J.X.; Fan, X.J.; Lin, Q.L. Failure mode and effects analysis using D numbers and grey relational projection method. Expert Syst. Appl. 2014, 41, 4670–4679. [Google Scholar] [CrossRef]
- Deng, Y. Generalized evidence theory. Appl. Intell. 2015, 43, 530–543. [Google Scholar] [CrossRef]
- Zadeh, L.A. A simple view of the Dempster-Shafer theory of evidence and its implication for the rule of combination. AI Mag. 1986, 7. [Google Scholar] [CrossRef]
- Haenni, R. Are alternatives to Dempster’s rule of combination real alternatives?: Comments on About the belief function combination and the conflict management problem—-Lefevre et al. Inf. Fusion 2002, 3, 237–239. [Google Scholar] [CrossRef]
- Yager, R.R. On the Dempster-Shafer framework and new combination rules. Inf. Sci. 1987, 41, 93–137. [Google Scholar] [CrossRef]
- Smets, P. The combination of evidence in the transferable belief model. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 447–458. [Google Scholar] [CrossRef]
- Fu, C.; Yang, S. Conjunctive combination of belief functions from dependent sources using positive and negative weight functions. Expert Syst. Appl. 2014, 41, 1964–1972. [Google Scholar] [CrossRef]
- Dubois, D.; Prade, H. Representation and combination of uncertainty with belief functions and possibility measures. Comput. Intell. 1988, 4, 244–264. [Google Scholar] [CrossRef]
- Smets, P. Belief functions: The disjunctive rule of combination and the generalized Bayesian theorem. Int. J. Approx. Reason. 1993, 9, 1–35. [Google Scholar] [CrossRef]
- Murphy, C.K. Combining belief functions when evidence conflicts. Decis. Support Syst. 2000, 29, 1–9. [Google Scholar] [CrossRef]
- Deng, Y.; Shi, W.K.; Zhu, Z.F.; Liu, Q. Combining belief functions based on distance of evidence. Decis. Support Syst. 2004, 38, 489–493. [Google Scholar]
- Han, D.; Han, C.; Yang, Y. Multiple classifiers fusion based on weighted evidence combination. In Proceedings of the 2007 IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 2138–2143.
- Fu, C.; Chin, K.S. Robust evidential reasoning approach with unknown attribute weights. Knowl. Based Syst. 2014, 59, 9–20. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, T.; Chen, D.; Zhang, W. Novel Algorithm for Identifying and Fusing Conflicting Data in Wireless Sensor Networks. Sensors 2014, 14, 9562–9581. [Google Scholar] [CrossRef] [PubMed]
- Fan, X.; Zuo, M.J. Fault Diagnosis of Machines Based on D-S Evidence Theory. Part 1: D-S Evidence Theory and Its Improvement. Pattern Recognit. Lett. 2006, 27, 366–376. [Google Scholar] [CrossRef]
- Guo, H.; Shi, W.; Deng, Y. Evaluating sensor reliability in classification problems based on evidence theory. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2006, 36, 970–981. [Google Scholar] [CrossRef]
- Cai, B.; Liu, Y.; Ma, Y.; Liu, Z.; Zhou, Y.; Sun, J. Real-time reliability evaluation methodology based on dynamic Bayesian networks: A case study of a subsea pipe ram BOP system. ISA Trans. 2015, 58, 595–604. [Google Scholar] [CrossRef] [PubMed]
- Cai, B.; Liu, Y.; Fan, Q.; Zhang, Y.; Yu, S.; Liu, Z.; Dong, X. Performance evaluation of subsea BOP control systems using dynamic Bayesian networks with imperfect repair and preventive maintenance. Eng. Appl. Artif. Intell. 2013, 26, 2661–2672. [Google Scholar] [CrossRef]
- Cai, B.; Liu, Y.; Zhang, Y.; Fan, Q.; Liu, Z.; Tian, X. A dynamic Bayesian networks modeling of human factors on offshore blowouts. J. Loss Prev. Process Ind. 2013, 26, 639–649. [Google Scholar] [CrossRef]
- Rogova, G.L.; Nimier, V. Reliability in information fusion: Literature survey. In Proceedings of the Seventh International Conference on Information Fusion, Stockholm, Sweden, 28 June–1 July 2004; Volume 2, pp. 1158–1165.
- Liu, W. Analyzing the degree of conflict among belief functions. Artif. Intell. 2006, 170, 909–924. [Google Scholar] [CrossRef]
- Jousselme, A.L.; Grenier, D.; Bossé, É. A new distance between two bodies of evidence. Inf. Fusion 2001, 2, 91–101. [Google Scholar] [CrossRef]
- Deng, Y. Deng Entropy: A Generalized Shannon Entropy to Measure Uncertainty. Available online: http://vixra.org/abs/1502.0222 (accessed on 16 January 2016).
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, K.; Xiao, F.; Fei, L.; Kang, B.; Deng, Y. Modeling Sensor Reliability in Fault Diagnosis Based on Evidence Theory. Sensors 2016, 16, 113. https://doi.org/10.3390/s16010113
Yuan K, Xiao F, Fei L, Kang B, Deng Y. Modeling Sensor Reliability in Fault Diagnosis Based on Evidence Theory. Sensors. 2016; 16(1):113. https://doi.org/10.3390/s16010113
Chicago/Turabian StyleYuan, Kaijuan, Fuyuan Xiao, Liguo Fei, Bingyi Kang, and Yong Deng. 2016. "Modeling Sensor Reliability in Fault Diagnosis Based on Evidence Theory" Sensors 16, no. 1: 113. https://doi.org/10.3390/s16010113
APA StyleYuan, K., Xiao, F., Fei, L., Kang, B., & Deng, Y. (2016). Modeling Sensor Reliability in Fault Diagnosis Based on Evidence Theory. Sensors, 16(1), 113. https://doi.org/10.3390/s16010113