
Performance Evaluation of Smartphone Inertial Sensors Measurement for Range of Motion

 ,
,
Abstract
:1. Introduction
2. Related Works
3. Materials and Method
3.1. Material
3.1.1. Smartphones
3.1.2. Xsens
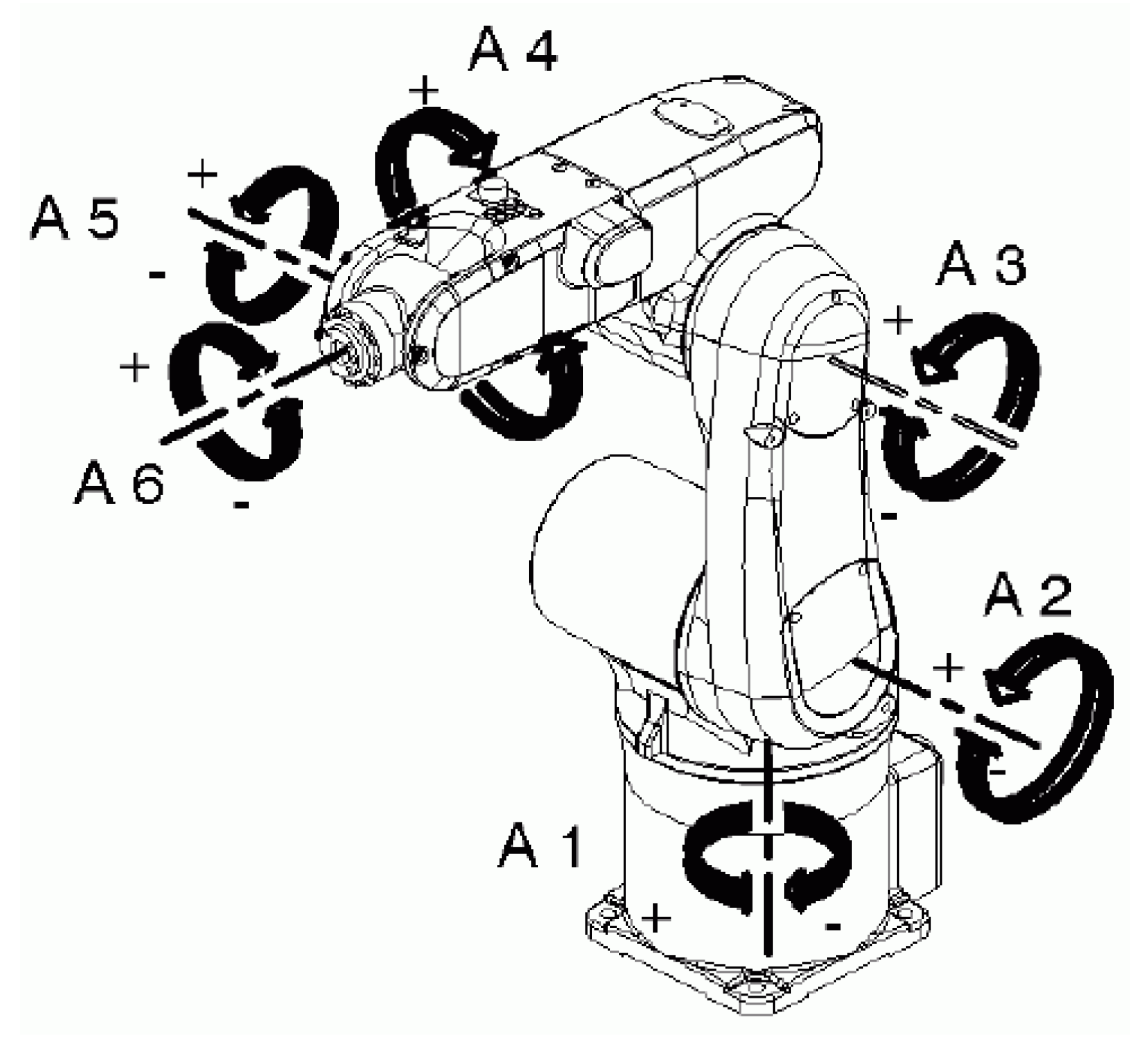
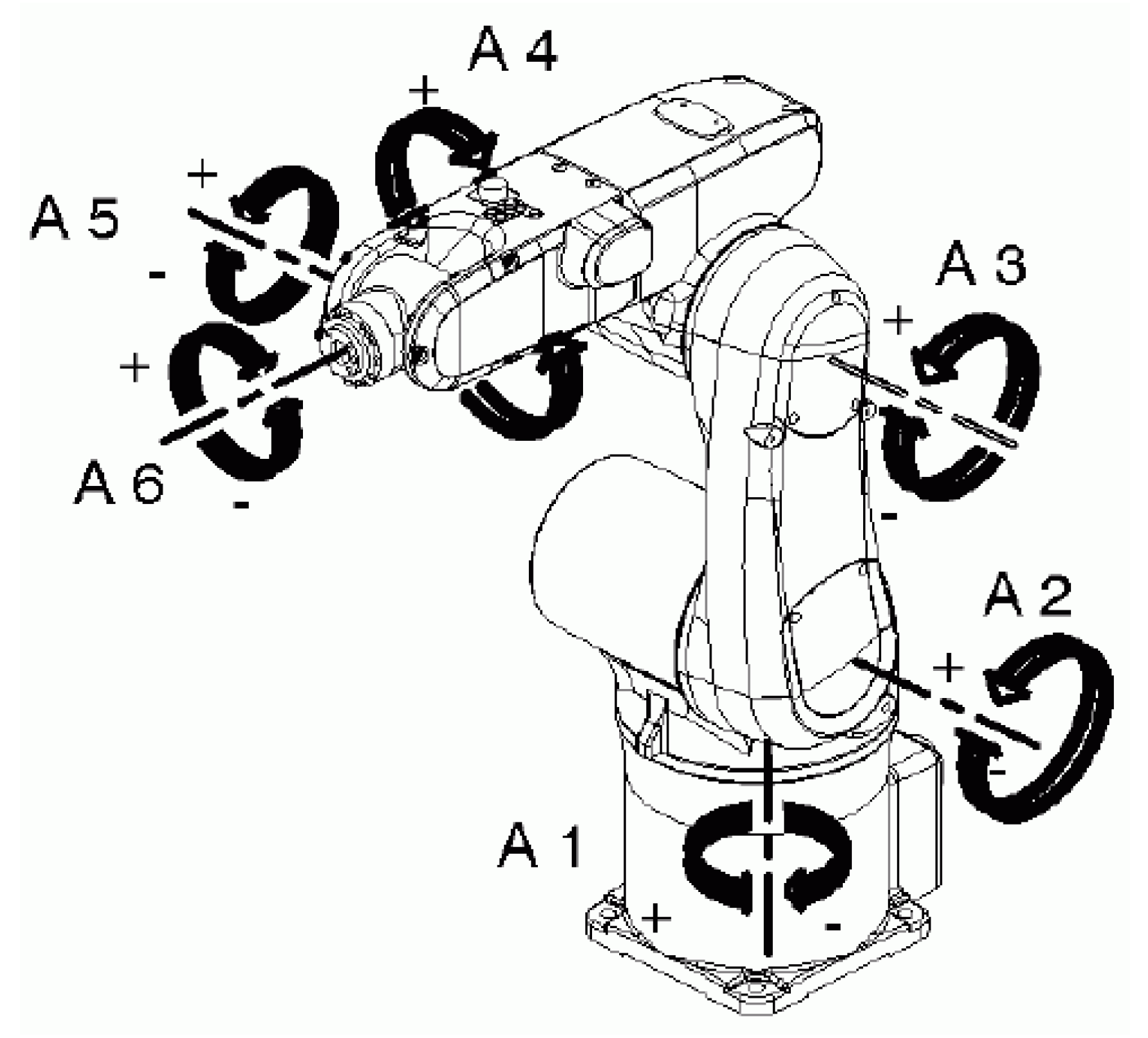
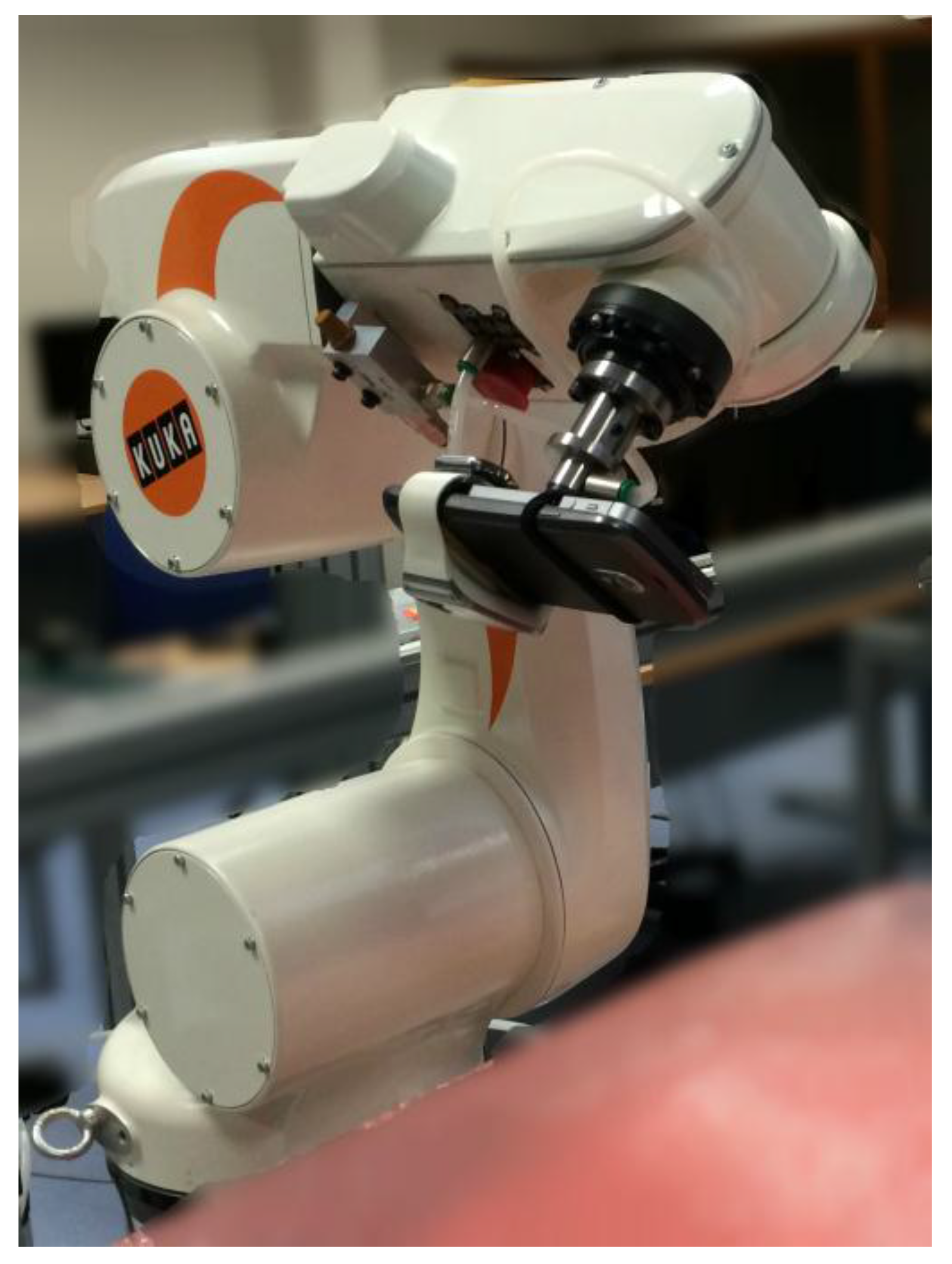
3.1.3. Robot
3.2. Angle Estimation
3.3. Filters Implementation Algorithms
3.3.1. Mahony Filter
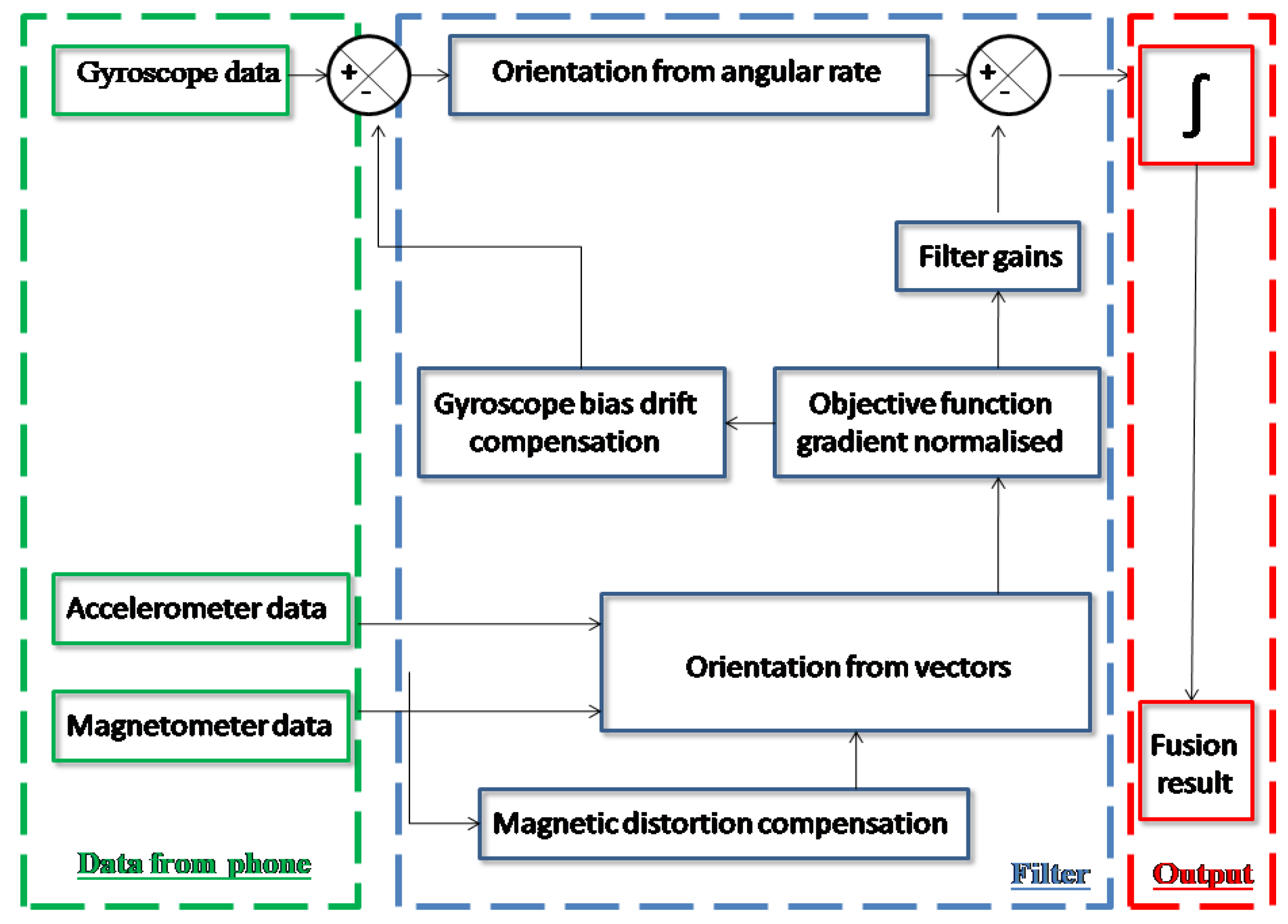
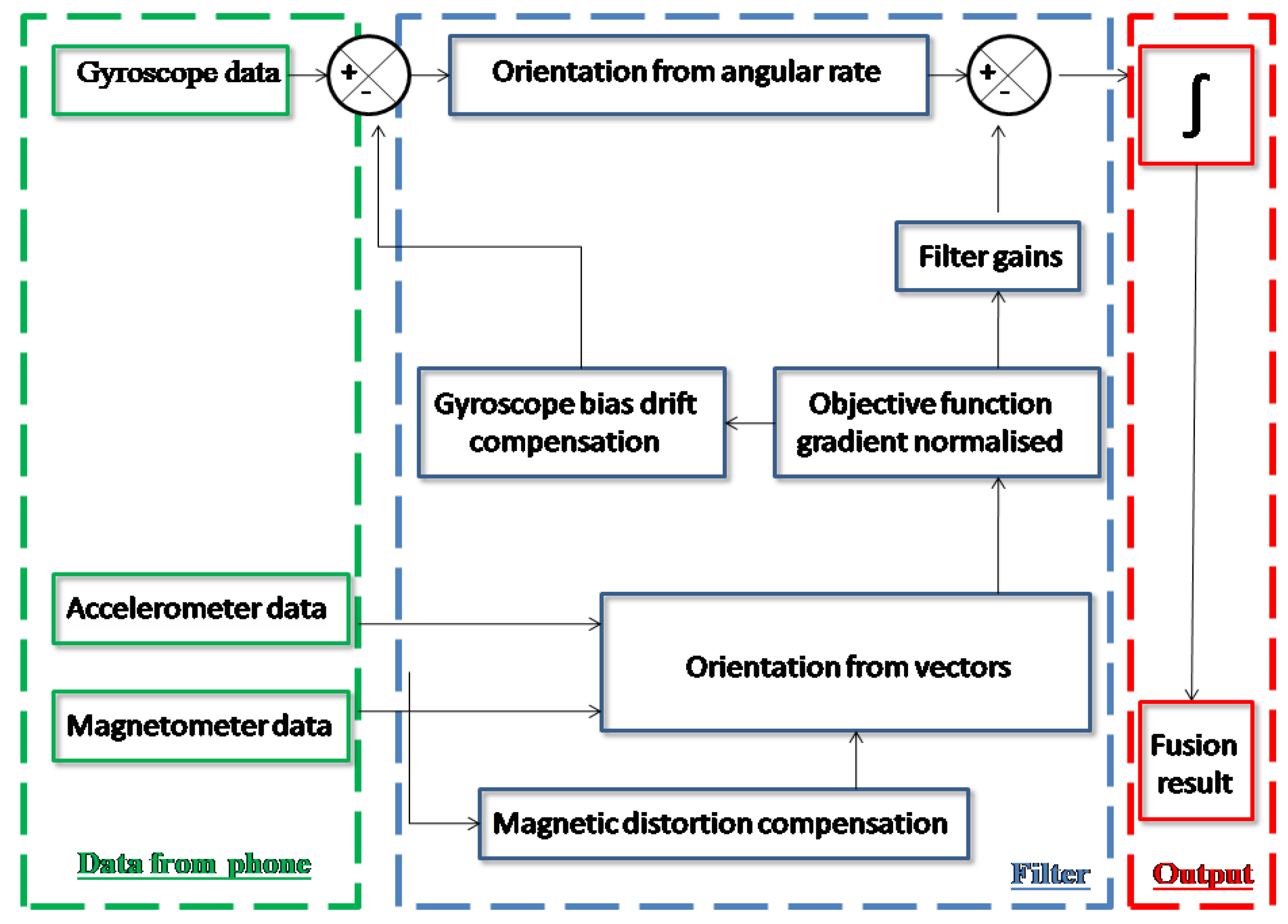
3.3.2. Madgwick Filter
3.4. Method
3.4.1. Global Methodology
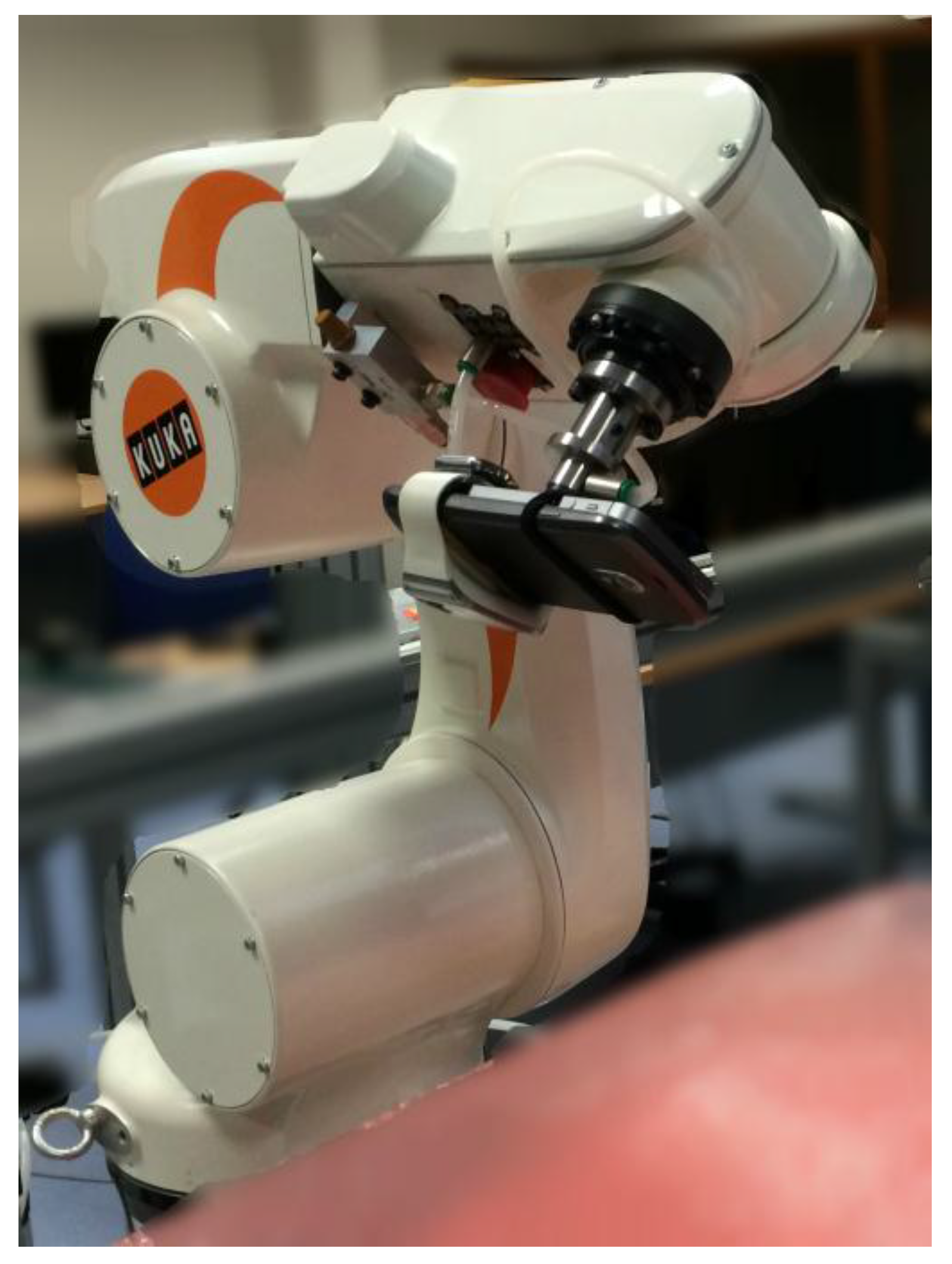
3.4.2. Protocol 1: Effect of the Position on Kuka Robotic Arm and Repeatability
3.4.3. Protocol 2: Devices Performance Compared to Gold Standard
- The static state measure consists in replicating measurements of angles from 0 to 180°, with a step of 5° and a stop of ten seconds at each position. This protocol was carried out 6 times for each axis.
- The dynamic state measure consists in replicating measurements from 0 to 180°, with a step of 45° at rates of 20% and 50% of the maximum speed of the robot and with stop of ten seconds at each position. This protocol was also carried out 6 times for each axis and each speed.
3.5. Analysis
4. Results
4.1. Protocol 1: Effect of the Position on Kuka Robotic Arm and Repeatability

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| iPhone 5S Alone | iPhone 5S with Galaxy Nexus | iPhone 5S (Opposite Direction) | iPhone 5S (Centered on Sensors) | |
|---|---|---|---|---|
| Trial 1 | 0.04 (0.004 | 0–0.23) | 0.09 (0.011 | 0.02–0.32) | 0.07 (0.009 | 0–0.34) | 0.06 (0.010 | 0–0.43) |
| Trial 2 | 0.04 (0.004 | 0–0.21) | 0.08 (0.012 | 0–0.32) | 0.07 (0.009 | 0–0.33) | 0.06 (0.010 | 0–0.41) |
| Trial 3 | 0.04 (0.004 | 0–0.26) | 0.08 (0.009 | 0–0.28) | 0.07 (0.008 | 0–0.35) | 0.06 (0.010 | 0–0.38) |
| Trial 4 | 0.04 (0.004 | 0–0.26) | 0.07 (0.009 | 0–0.28) | 0.07 (0.007 | 0–0.30) | 0.06 (0.010 | 0–0.40) |
| Trial 5 | 0.04 (0.005 | 0–0.27) | 0.07 (0.009 | 0–0.26) | 0.07 (0.008 | 0–0.31) | 0.07 (0.010 | 0–0.42) |
| Trial 6 | 0.05 (0.006 | 0–0.27) | 0.07 (0.008 | 0–0.26) | 0.06 (0.008 | 0–0.37) | 0.06 (0.011 | 0–0.44) |
| iPhone 5S alone | iPhone 5S with Galaxy Nexus | iPhone 5S (Opposite Direction) | iPhone 5S Centered on Sensors | |
|---|---|---|---|---|
| Trial 1 | 0.05 (0.006 | 0–0.29) | 0.09 (0.011 | 0–0.28) | 0.05 (0.005 | 0–0.25) | 0.12 (0.011 | 0–0.31) |
| Trial 2 | 0.05 (0.005 | 0–0.27) | 0.08 (0.010 | 0–0.28) | 0.05 (0.005 | 0–0.24) | 0.11 (0.010 | 0–0.32) |
| Trial 3 | 0.05 (0.005 | 0–0.27) | 0.08 (0.011 | 0–0.31) | 0.05 (0.005 | 0–0.26) | 0.11 (0.009 | 0–0.31) |
| Trial 4 | 0.05 (0.006 | 0–0.28) | 0.08 (0.011 | 0–0.30) | 0.04 (0.005 | 0–0.27) | 0.11 (0.010 | 0–0.28) |
| Trial 5 | 0.05 (0.006 | 0–0.28) | 0.08 (0.011 | 0–0.30) | 0.05 (0.005 | 0–0.29) | 0.11 (0.010 | 0.01–0.29) |
| Trial 6 | 0.05 (0.006 | 0–0.28) | 0.08 (0.012 | 0–0.33) | 0.04 (0.005 | 0–0.28) | 0.11 (0.009 | 0–0.26) |
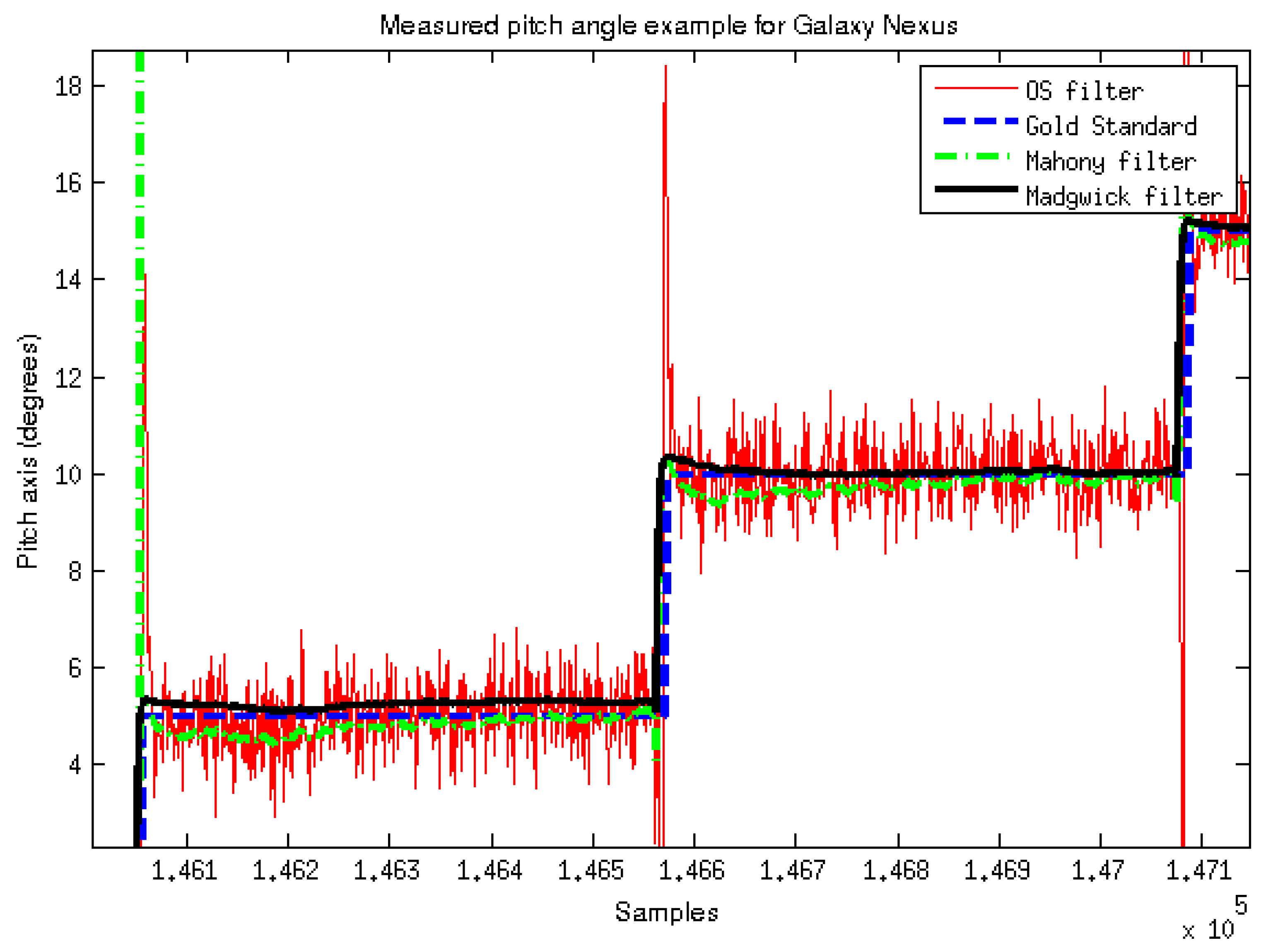
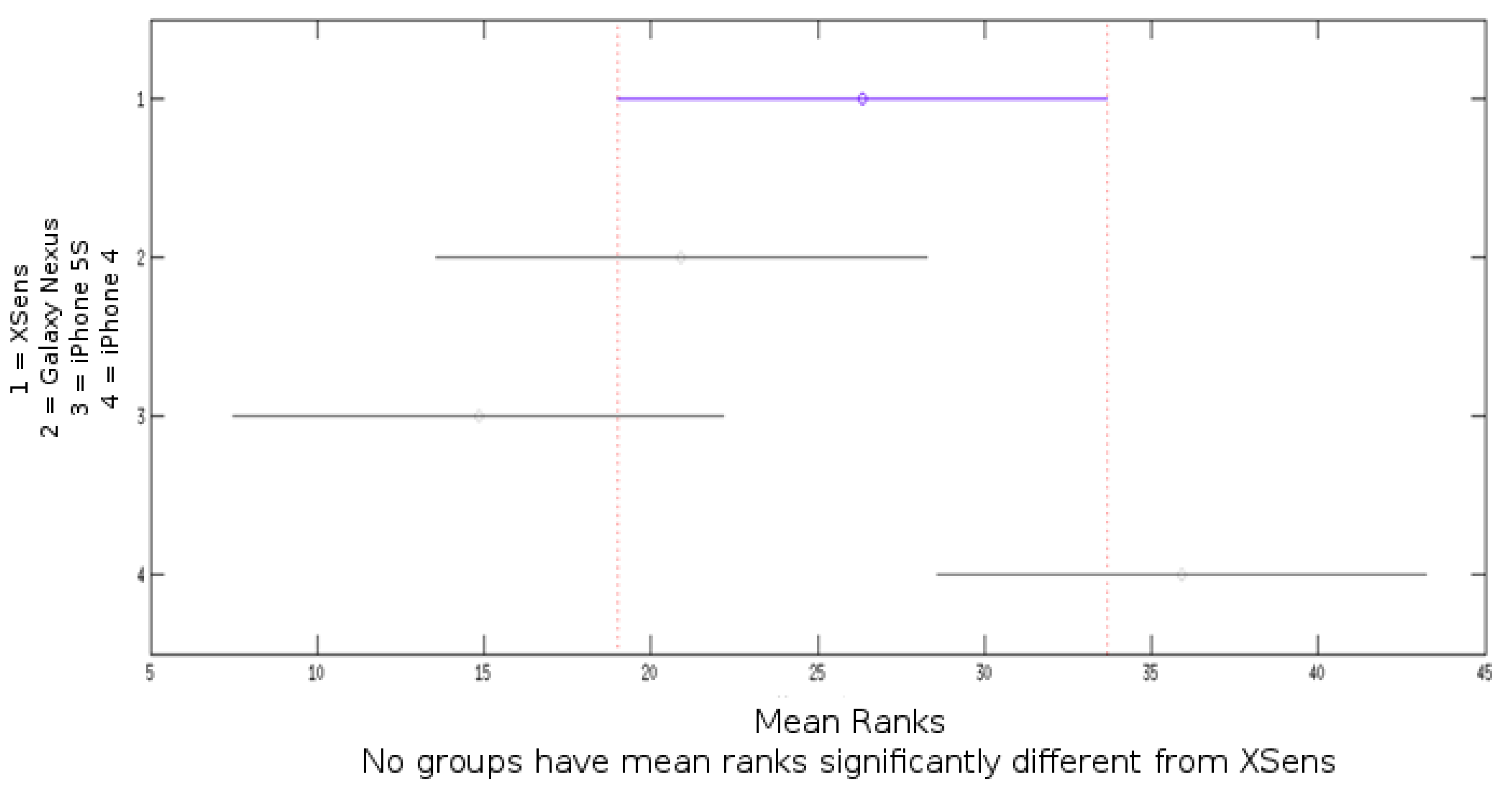
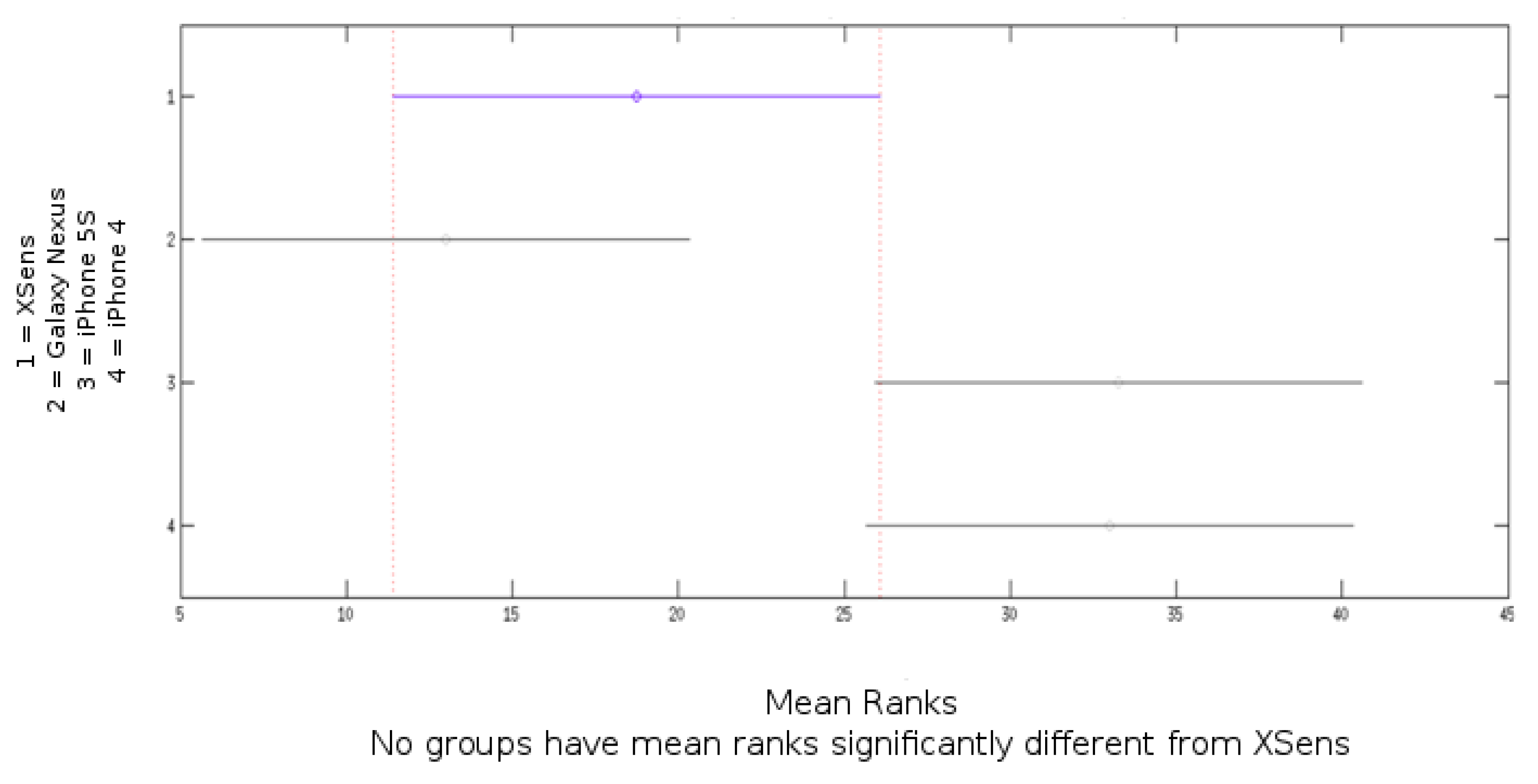
4.2. Protocol 2: Devices Performance Compared to Gold Standard
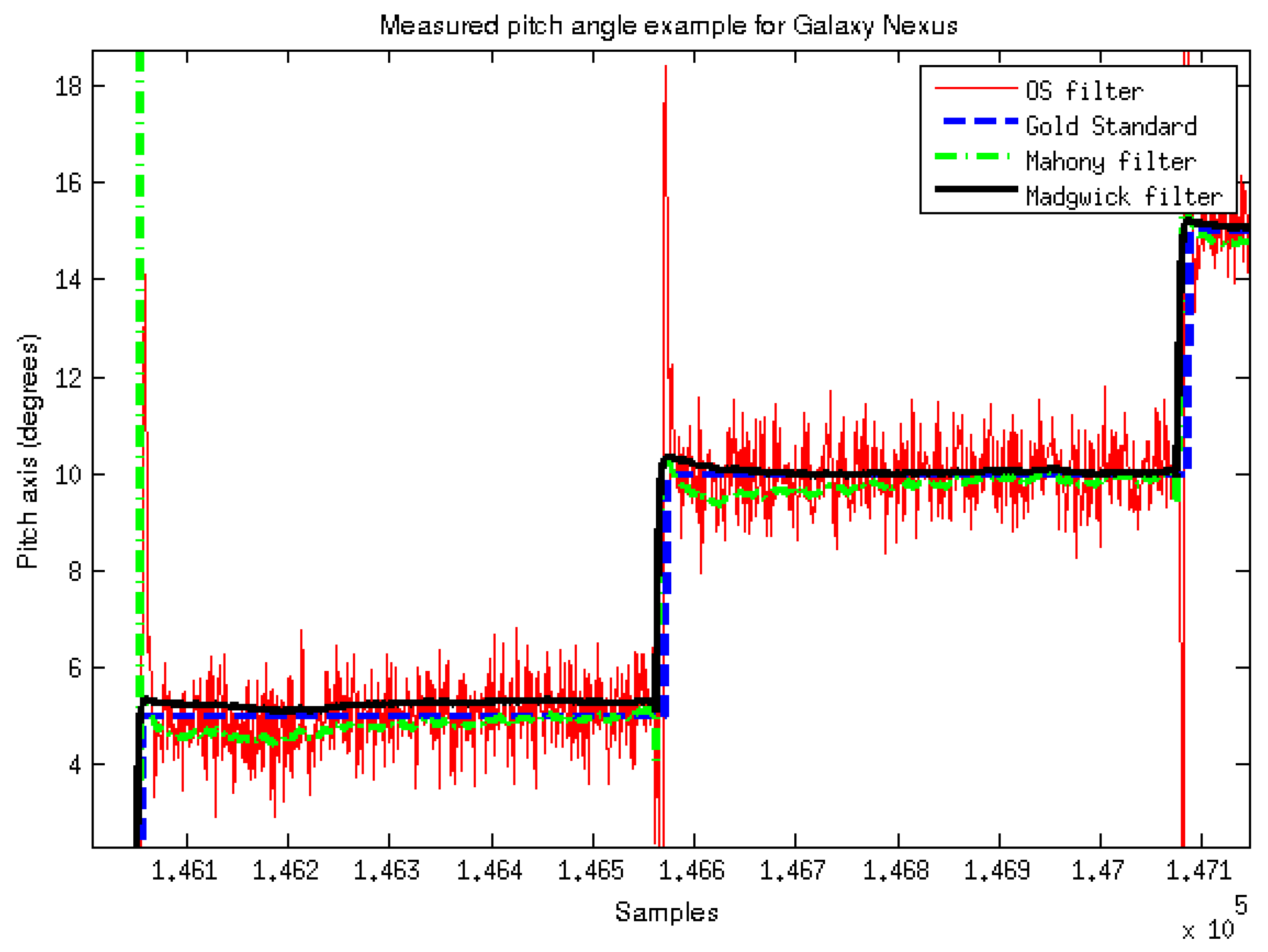
4.2.1. Static Protocol
| Roll | Pitch | ||||
|---|---|---|---|---|---|
| RMS | Variance | RMS | Variance | ||
| Nexus | Manufacturer filter | 0.16 (0.05–0.42) | 0.36 (0.33–0.39) | 0.21 (0.07–0.35) | 0.42 (0.38–0.47) |
| Madgwick | 0.19 (0.07–0.42) | 0 (0–0) | 0.21 (0.06–0.62) | 0.01 (0.01–0.01) | |
| Mahony | 0.16 (0.05–0.38) | 0 (0–0) | 0.25 (0.05–0.50) | 0.01 (0.01–0.01) | |
| iPhone 5S | Manufacturer filter | 0.15 (0.02–0.48) | 0 (0–0) | 0.13 (0.02–0.24) | 0 (0–0.01) |
| Madgwick | 0.14 (0.03–0.47) | 0.01 (0–0.01) | 0.29 (0.05–0.55) | 0 (0–0.02) | |
| Mahony | 0.13 (0–0.50) | 0.02 (0–0.09) | 0.17 (0.03–0.29) | 0 (0.01–0.01) | |
| iPhone 4 | Manufacturer filter | 0.07 (0.01–0.18) | 0.02 (0–0.17) | 0.08 (0.01–0.16) | 0.36 (0–1.12) |
| Madgwick | 0.10 (0.01–0.17) | 0.55 (0–1.57) | 0.13 (0.02–0.63) | 0.08 (0–0.39) | |
| Mahony | 0.12 (0.01–0.61) | 0.09 (0–0.42) | 0.09 (0.01–0.16) | 0.56 (0–1.58) | |
| Xsens | Manufacturer filter | 0.22 (0.08–0.36) | 0 (0–0.01) | 0.22 (0.11–0.28) | 0 (0–0.01) |
| Madgwick | 0.57 (0.02–3.44) | 0.05 (0–0.62) | 0.16 (0.05–0.29) | 0 (0–0.03) | |
| Mahony | 0.68 (0.02–5.45) | 0.08 (0–1.26) | 0.10 (0.03–0.18) | 0 (0–0.02) | |
4.2.2. Dynamic Protocol
| 20% | 50% | ||||
|---|---|---|---|---|---|
| RMS | Variance | RMS | Variance | ||
| Nexus | Manufacturer filter | 1.55 (0.64–3.51) | 0.34 (0.31–0.38) | 1.57 (0.81–3.43) | 2.15 (0.59–4.37) |
| Madgwick | 3.36 (0.39–7.95) | 0.02 (0–0.06) | 2.84 (0.58–6.23) | 0.90 (0.12–2.65) | |
| Mahony | 3.56 (0.69–8.24) | 0.03 (0–0.08) | 3.44 (0.67–7.73) | 0.99 (0.13–3.21) | |
| iPhone 5S | Manufacturer filter | 0.75 (0.32–1.33) | 0 (0–0) | 0.78 (0.32–1.29) | 0 (0–0.02) |
| Madgwick | 8.05 (3.09–15.96) | 0.73 (0.02–2.11) | 8.70 (2.77–17.27) | 0.99 (0.04–2.75) | |
| Mahony | 2.42 (0.29–4.54) | 3.60 (0–14.11) | 4.16 (0.71–7.57) | 6.09 (0.02–23.94) | |
| iPhone 4 | Manufacturer filter | 3.57 (0.55–11.03) | 0.55 (0.02–1.27) | 3.52 (0.66–10.80) | 0.48 (0.02–1.06) |
| Madgwick | 6.99 (0.91–17.92) | 1.89 (0–7.56) | 8.16 (0.95–20.35) | 1.05 (0.01–3.66) | |
| Mahony | 7.02 (0.95–17.97) | 2.94 (0–11.74) | 8.76 (1.02–21.35) | 3.99 (0.01–15.90) | |
| Xsens | Manufacturer filter | 2.21 (0.84–4.29) | 0 (0–0) | 2.55 (0.84–4.99) | 0.01 (0–0.03) |
| Madgwick | 10.39 (1.05–21.04) | 1.28 (0–4.78) | 10.51 (0.62–21.99) | 2.24 (0–6.48) | |
| Mahony | 3.93 (1.40–8.00) | 7.49 (0–29.96) | 6.94 (1.33–14.20) | 26.79 (0–107.16) | |
| 20% | 50% | ||||
|---|---|---|---|---|---|
| RMS | Variance | RMS | Variance | ||
| Nexus | Manufacturer filter | 2.29 (1.25–3.77) | 3.74 (1.01–6.93) | 2.00 (0.71–3.48) | 1.42 (0.64–3.10) |
| Madgwick | 2.88 (1.61–4.78) | 2.66 (0.79–5.41) | 2.65 (0.77–4.15) | 1.68 (0.03–3.53) | |
| Mahony | 5.64 (0.66–15.25) | 3.06 (2.03–5.19) | 2.97 (1.07–5.17) | 2.02 (0.09–3.02) | |
| iPhone 5S | Manufacturer filter | 1.94 (0.85–7.41) | 0 (0–0) | 1.94 (0.91–4.01) | 0 (0–0) |
| Madgwick | 3.36 (0.34–7.41) | 0.33 (0–0.91) | 3.45 (0.25–7.26) | 0.27 (0.04–0.76) | |
| Mahony | 1.17 (0.14–3.18) | 0.03 (0–0.06) | 1.15 (0.48–2.69) | 0.29 (0.01–0.71) | |
| iPhone 4 | Manufacturer filter | 1.40 (0.37–2.20) | 1.73 (0.07–2.33) | 1.33 (0.32–2.18) | 1.78 (0.07–2.45) |
| Madgwick | 1.97 (1.30–2.32) | 0.02 (0–0.03) | 1.93 (1.40–2.28) | 0.11 (0.06–0.31) | |
| Mahony | 1.12 (0.21–2.07) | 0 (0–0.01) | 1.05 (0.32–1.90) | 0.07 (0–0.21) | |
| Xsens | Manufacturer filter | 0.87 (0.30–1.21) | 0.02 (0–0.05) | 0.94 (0.30–1.23) | 0.04 (0–0.14) |
| Madgwick | 2.55 (1.02–4.10) | 0.31 (0–1.20) | 2.42 (0.65–4.19) | 0.29 (0.01–0.95) | |
| Mahony | 1.24 (0.19–2.94) | 0.06 (0–0.11) | 1.43 (0.25–3.22) | 0.72 (0–2.24) | |
5. Discussion
5.1. Protocol 1: Effect of the Position on Kuka Robotic Arm and Repeatability
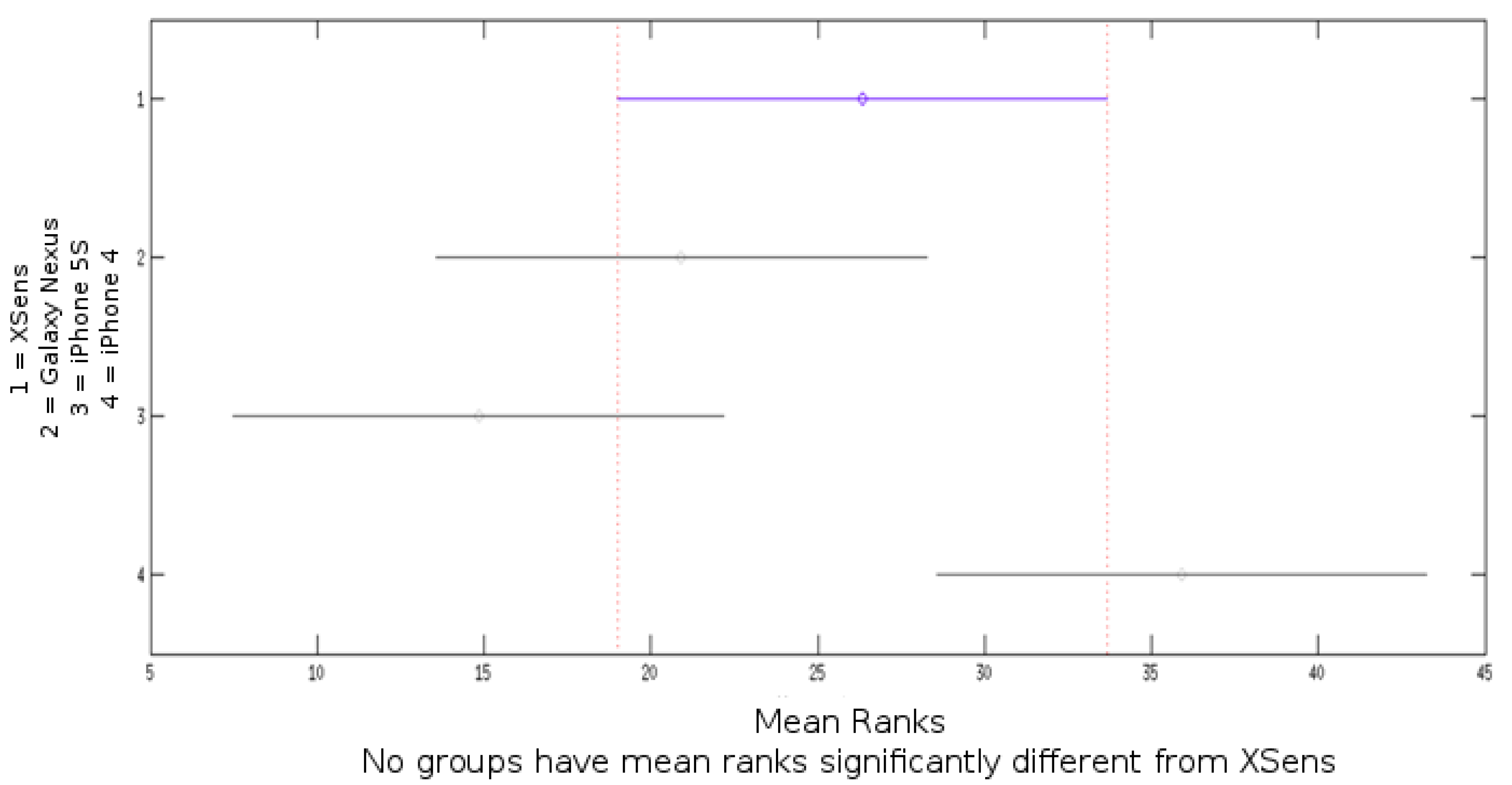
5.2. Protocol 2: Devices Performance Compared to Gold Standard and Xsens
5.2.1. RMS and Variance
5.2.2. Context
5.2.3. Impact of Velocity and Filter Effect
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- GfK. Available online: http://www.gfk.com/news-and-events/press-room/press-releases/pages/ global-smartphone-sales-exceed-1-2b-units-in-2014.aspx (accessed on 1 July 2015).
- Kosse, N.M.; Caljouw, S.; Vervoort, D.; Vuillerme, N.; Lamoth, C.J. Validity and Reliability of Gait and Postural Control Analysis Using the Tri-axial Accelerometer of the iPod Touch. Ann. Biomed. Eng. 2014, 43, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Milani, P.; Coccetta, C.A.; Rabini, A.; Sciarra, T.; Massazza, G.; Ferriero, G. Mobile Smartphone Applications for Body Position Measurement in Rehabilitation: A Focus on Goniometric Tools. PM&R 2014, 6, 1038–1043. [Google Scholar]
- Campbell, A.; Choudhury, T. From smart to cognitive phones. IEEE Pervasive Comput. 2012, 11, 7–11. [Google Scholar] [CrossRef]
- Cook, D.J.; Das, S.K. Pervasive computing at scale: Transforming the state of the art. Pervasive Mob. Comput. 2012, 8, 22–35. [Google Scholar] [CrossRef]
- Anguita, D.; Ghio, A.; Oneto, L.; Parra, X.; Reyes-Ortiz, J.L. A public domain dataset for human activity recognition using smartphones. In Proceedings of the European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN), Bruges, Belgium, 24–26 April 2013.
- Habib, M.A.; Mohktar, M.S.; Kamaruzzaman, S.B.; Lim, K.S.; Pin, T.M.; Ibrahim, F. Smartphone-based solutions for fall detection and prevention: Challenges and open issues. Sensors 2014, 14, 7181–7208. [Google Scholar] [CrossRef] [PubMed]
- Abbate, S.; Avvenuti, M.; Bonatesta, F.; Cola, G.; Corsini, P.; Vecchio, A. A smartphone-based fall detection system. Pervasive Mob. Comput. 2012, 8, 883–899. [Google Scholar] [CrossRef]
- Williamson, R.; Andrews, B.J. Detecting absolute human knee angle and angular velocity using accelerometers and rate gyroscopes. Med. Biol. Eng. Comput. 2001, 39, 294–302. [Google Scholar] [CrossRef] [PubMed]
- Mitchell, K.; Gutierrez, S.B.; Sutton, S.; Morton, S.; Morgenthaler, A. Reliability and validity of goniometric iPhone applications for the assessment of active shoulder external rotation. Physiother. Theor. Pract. 2014, 30, 521–525. [Google Scholar] [CrossRef] [PubMed]
- Jenny, J.Y. Measurement of the knee flexion angle with a smartphone-application is precise and accurate. J. arthroplast. 2013, 28, 784–787. [Google Scholar] [CrossRef] [PubMed]
- Vohralik, S.L.; Bowen, A.R.; Burns, J.; Hiller, C.E.; Nightingale, E.J. Reliability and Validity of a Smartphone App to Measure Joint Range. Am. J. Phys. Med. Rehabil. 2015, 94, 325–330. [Google Scholar] [CrossRef] [PubMed]
- Madgwick, S. An Efficient Orientation Filter for Inertial and Inertial/Magnetic Sensor Arrays; Technical Report; Report x-io and University of Bristol: Bristol, UK, 30 April 2010. [Google Scholar]
- Cutti, A.G.; Giovanardi, A.; Rocchi, L.; Davalli, A.; Sacchetti, R. Ambulatory measurement of shoulder and elbow kinematics through inertial and magnetic sensors. Med. Boil. Eng Comput. 2008, 46, 169–178. [Google Scholar] [CrossRef] [PubMed]
- Chung, W.M.; Yeung, S.; Chan, W.W.; Lee, R. Validity of VICON Motion Analysis System for Upper Limb Kinematic MeasuremeNT–A Comparison Study with Inertial Tracking Xsens System. Hong Kong Physiother. J. 2011, 29. [Google Scholar] [CrossRef]
- Hamacher, D.; Bertram, D.; Fölsch, C.; Schega, L. Evaluation of a visual feedback system in gait retraining: A pilot study. Gait Posture 2012, 36, 182–186. [Google Scholar] [CrossRef] [PubMed]
- Saber-Sheikh, K.; Bryant, E.C.; Glazzard, C.; Hamel, A.; Lee, R.Y. Feasibility of using inertial sensors to assess human movement. Man. Ther. 2010, 15, 122–125. [Google Scholar] [CrossRef] [PubMed]
- Kuka-Robotics. Available online: http://www.kuka-robotics.com/res/sps/e6c77545-9030-49b1-93f5-4d17c92173aa_Spez_KR_5_sixx_CR_en.pdf (accessed on 1 July 2015).
- Euston, M.; Coote, P.; Mahony, R.; Kim, J.; Hamel, T. A complementary filter for attitude estimation of a fixed-wing UAV. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, 22–26 September 2008.
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; Technical Report 95-041; University of North Carolina: Chapel Hill, NC, USA, 24 July 2006. [Google Scholar]
- Mahony, S.; Hamel, T.; Pflimlin, J.-M. Nonlinear complementary filters on the special orthogonal group. Auto. Control IEEE Transac. 2008, 53, 1203–1218. [Google Scholar] [CrossRef]
- Sessa, S.; Zecca, M.; Lin, Z.; Bartolomeo, L.; Ishii, H.; Takanishi, A. A methodology for the performance evaluation of inertial measurement units. J. Intel. Robot. Syst. 2013, 71, 143–157. [Google Scholar] [CrossRef]
- Lebel, K.; Boissy, P.; Hamel, M.; Duval, C. Inertial Measures of Motion for Clinical Biomechanics: Comparative Assessment of Accuracy under Controlled Conditions-Effect of Velocity. PloS One 2013, 8. [Google Scholar] [CrossRef] [PubMed]
- Leardini, A.; Lullini, G.; Giannini, S.; Berti, L.; Ortolani, M.; Caravaggi, P. Validation of the angular measurements of a new inertial-measurement-unit based rehabilitation system: comparison with state-of-the-art gait analysis. J. Neuroeng. Rehabil. 2014, 11, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Milanese, S.; Gordon, S.; Buettner, P.; Flavell, C.; Ruston, S.; Coe, D.; O’Sullivan, W.; McCormack, S. Reliability and concurrent validity of knee angle measurement: Smart phone App versus Universal Goniometer used by experienced and novice clinicians. Man. Ther. 2014, 19, 569–574. [Google Scholar] [CrossRef] [PubMed]
- Gajdosik, R.L.; Bohannon, R.W. Clinical measurement of range of motion review of goniometry emphasizing reliability and validity. Phys. Ther. 1987, 67, 1867–1872. [Google Scholar] [PubMed]
- Brosseau, L.; Tousignant, M.; Budd, J.; Chartier, N.; Duciaume, L.; Plamondon, S.; O’Sullivan, J.P.; O’Donoghue, S.; Balmer, S. Intratester and intertester reliability and criterion validity of the parallelogram and universal goniometers for active knee flexion in healthy subjects. Physiother. Res. Int. 1997, 2, 150–166. [Google Scholar] [CrossRef] [PubMed]
- Wu, G.; Van Der Helm, F.C.; Veeger, H.E.J.; Makhsous, M.; Van Roy, P.; Anglin, C.; Nagels, J.; Karduna, A.R.; McQuade, K.; Wang, X.; et al. ISB recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion—Part II: Shoulder, elbow, wrist and hand. J. Biomech. 2005, 38, 981–992. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mourcou, Q.; Fleury, A.; Franco, C.; Klopcic, F.; Vuillerme, N. Performance Evaluation of Smartphone Inertial Sensors Measurement for Range of Motion. Sensors 2015, 15, 23168-23187. https://doi.org/10.3390/s150923168
Mourcou Q, Fleury A, Franco C, Klopcic F, Vuillerme N. Performance Evaluation of Smartphone Inertial Sensors Measurement for Range of Motion. Sensors. 2015; 15(9):23168-23187. https://doi.org/10.3390/s150923168
Chicago/Turabian StyleMourcou, Quentin, Anthony Fleury, Céline Franco, Frédéric Klopcic, and Nicolas Vuillerme. 2015. "Performance Evaluation of Smartphone Inertial Sensors Measurement for Range of Motion" Sensors 15, no. 9: 23168-23187. https://doi.org/10.3390/s150923168
APA StyleMourcou, Q., Fleury, A., Franco, C., Klopcic, F., & Vuillerme, N. (2015). Performance Evaluation of Smartphone Inertial Sensors Measurement for Range of Motion. Sensors, 15(9), 23168-23187. https://doi.org/10.3390/s150923168