
Extrinsic Calibration of Camera Networks Using a Sphere

 ,
,
Abstract
:1. Introduction
- Spheres have consistent appearance when observed from an arbitrary direction. Therefore the center of the sphere can be used as a feature point, rather than specific points on the calibration object. This means use of spheres can improve locating image features which will benefit classical point-like features-based method. While the sphere center is not visible directly, it can be estimated from an image, and correspondences between camera views can be found even if the cameras observe different sides of the sphere. In principle this is even possible for partially occluded spheres (but we will not treat that case in this paper).
- As the sphere is a large and easy recognizable object, finding corresponding spheres in various views is quite easy, even in images of low resolution. As the sphere is luminescent, simple intensity thresholding suffices to locate the spheres in the images.
- Assuming the sphere size is known, it is possible to estimate the distance to a specific camera, solely based on the observed image, i.e., without using information from other cameras. This means we can avoid using epipolar geometry to determine these distances, which are needed in the optimization method.
2. Related Work
3. Preliminaries
4. Estimating the Sphere Centers in a Local Camera Coordinate System
4.1. Projection of a Sphere on the Camera Plane
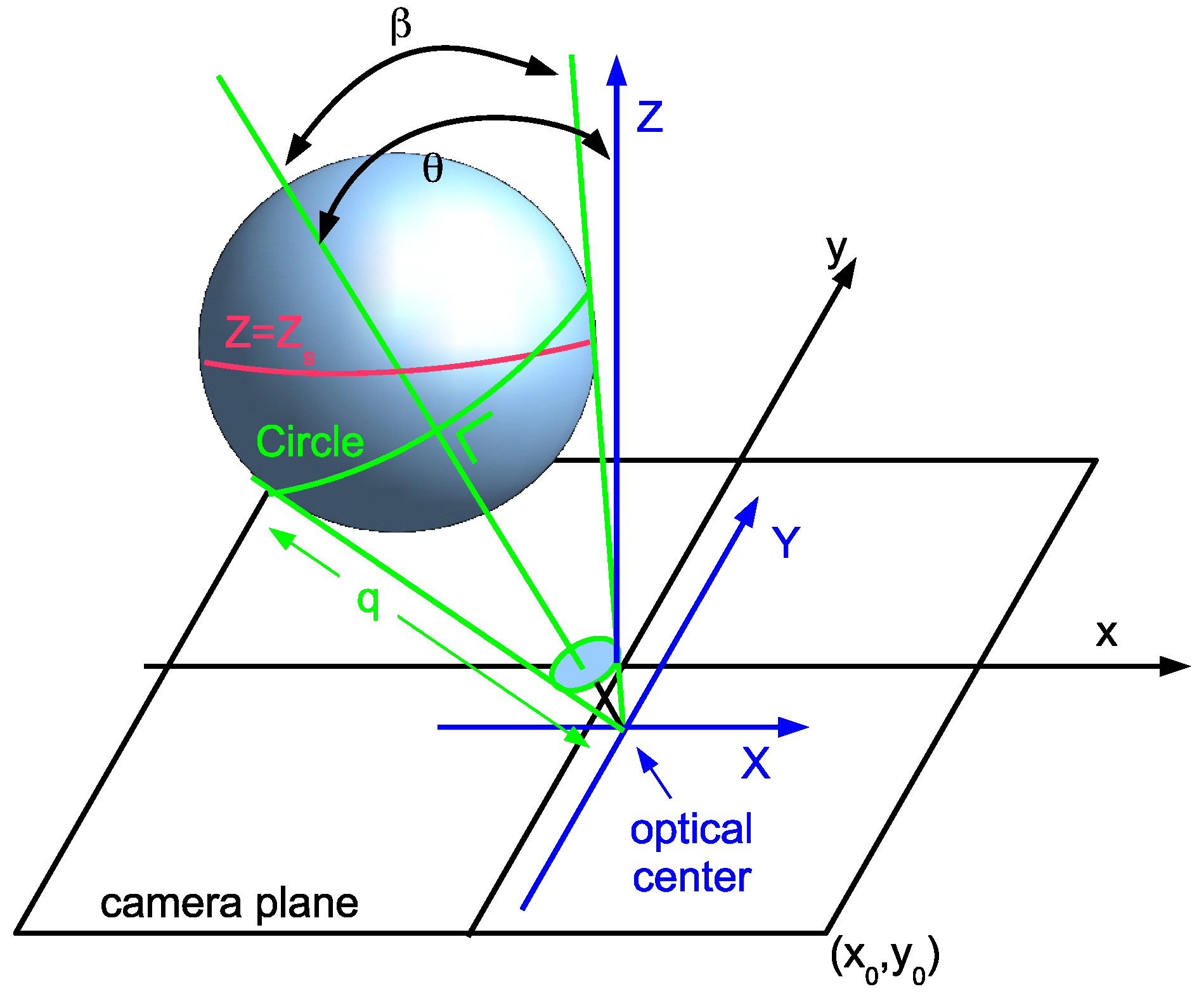
4.2. Estimation of the Sphere Position from an Image
- Segment the ellipse (projection of the sphere) within the image. This yields a binary image which resembles only an ellipse. In this process, we do not need to estimate the exact parameter of the ellipse, as we only need to estimate the the center and area of the projected sphere. In our experiments, we propose to use a lighted sphere, and slightly darkened the room, simple thresholding suffices to segment the ellipse blobs from the background.
- Since we assume that the center of the sphere projects to the center of the ellipse, from the binary image we estimate the pixel coordinates and of the center of gravity of the binary blob which represents the ellipse in the segmented image. After that we can get , and . We have . From Δ we can compute .
- Compute the area A of the (filled) projected ellipse: , where N is the number of pixels in the binary blob representing the segmented ellipse. This area also equals . So .
- From , and compute and .
5. Multi-Camera Calibration
5.1. Extrinsic Calibration based on Rank-4 Factorization
- Let be the SVD decomposition of ; extract , the first 4 columns of the matrix U.
- At this point, we define , and . Combining A, D and Equation (18), we know that must equal , from which we can compute A.
- Finally we compute .
5.2. Extrinsic Calibration based on Orthogonal Procrustes
- are not coplanar. In this case, the rotation solution is unique, is the desired solution.
- are coplanar but not collinear. There is a unique rotation as well as a unique reflection. In this case, we just need to check the value of : if , if , where is obtained by changing the sign of the last column of matrix .
- are collinear. There will be no unique solution for R(k).
5.3. Refinement through Gradient Descent
5.4. Alignment with a World Coordinate System
6. Performance Measures
- δrw. The triangulation error is a measurement of how the calibration matrices influence the accuracy of multi-camera triangulation. Let be the ground truth position of the ith test sample, and its position estimated using triangulation [25] based on estimated extrinsic parameters and image positions of the sample. This is also the classical method for 3D reconstruction, it represents how well we can measure the 3D world with estimated extrinsic parameters. The estimated 3D positions will differ from the true positions not only because of measurement errors but also due to any inaccuracies in the calibration matrices and the process of triangulation. The triangulation error δrw pools all of these errors. As such it is not an absolute measure of calibration accuracy. However, as we use the same image feature points and the same triangulation method to compare various calibration methods, δrw is a good quality measure for the extrinsic calibration. The error is expressed in in physical units (e.g., centimeter) and is defined as
- . The projection error is a measurement of how the calibration matrices influence the accuracy of projections of 3D points on image planes. Let be the observed pixel coordinates of the ith sample in the jth camera’s image, while is the estimated position through projection. When image feature points are projected from 3D points (with known position), the estimated 2D image positions will differ from the true positions not only because of measurement errors, but also due to any inaccuracy in the calibration matrices. The projection error takes all these errors into account. So it is not an absolute measurement of the calibration accuracy. However, since the same image feature points are used to compare different calibration methods, is another good quality measurement for the extrinsic calibration. The error is expressed in and is defined as
- . The reprojection error is a measurement of self-consistency of the calibration matrices. Different from the projection error, the 3D points are firstly obtained from triangulation based on estimated extrinsic parameters and image points. Then, image feature points are projected from these 3D points. The estimated 2D image positions will differ from the true positions not only because of measurement errors, but also due to any inaccuracy in the calibration matrices and the process of triangulation. The reprojection error takes all these errors into account. So it is not an absolute measurement of the calibration accuracy. However, since the same image feature points are used to compare different calibration methods, is another good quality measure for the extrinsic calibration. The error is expressed in and is defined as
7. Experiments and Results
7.1. Dataset for Evaluation
- Put the sphere in the common overlapping area at minimum 3 distinct non-collinear locations and let each camera capture an image at each location. The spheres are distributed evenly over working volume of the multi-camera system.
- Estimate the center of mass and the area of the binary blobs. Then, compute the estimated sphere position w.r.t. the camera coordinate system based on the equations in Section 4.
- Compute the extrinsic calibration matrices according to the equations in Section 5.

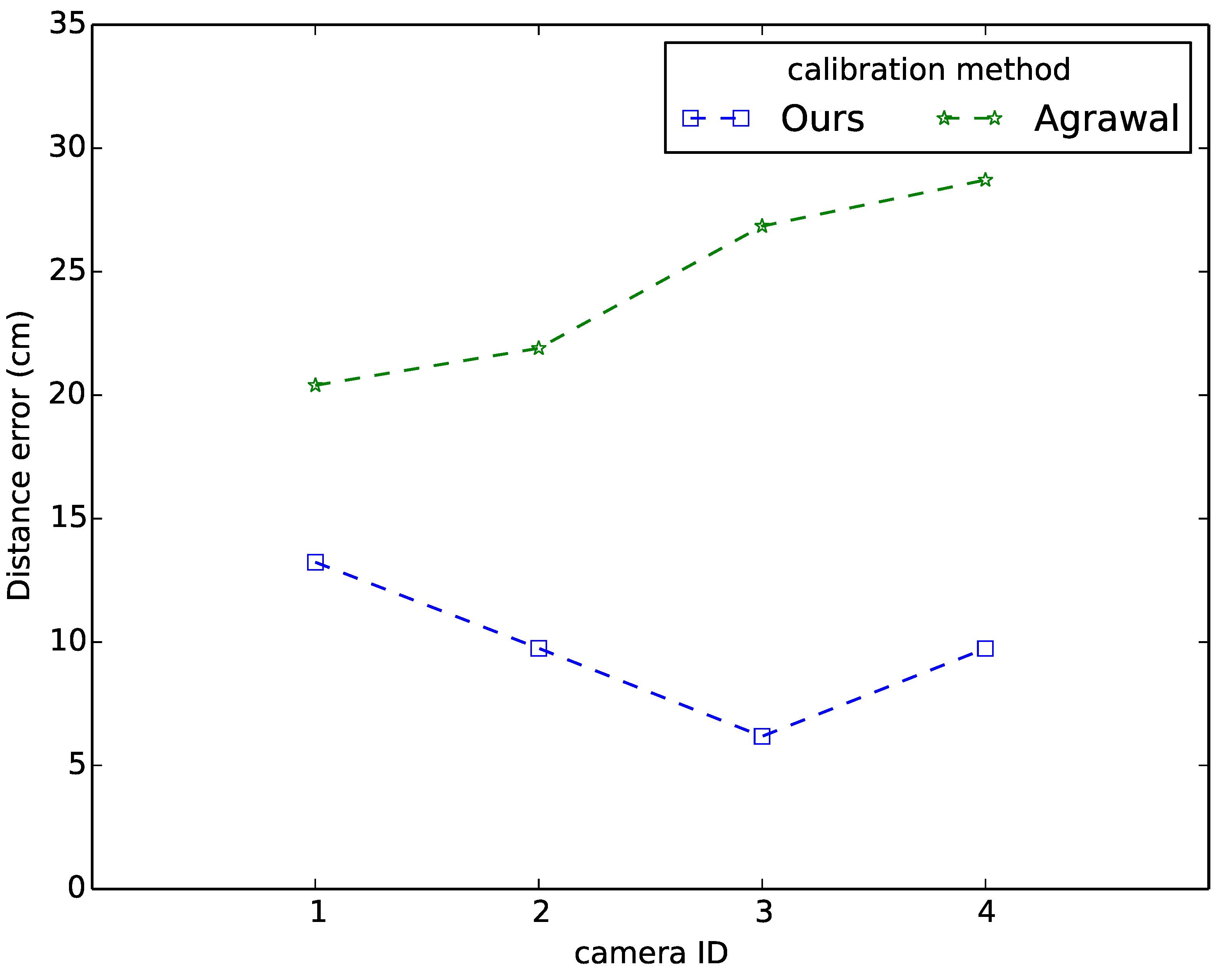
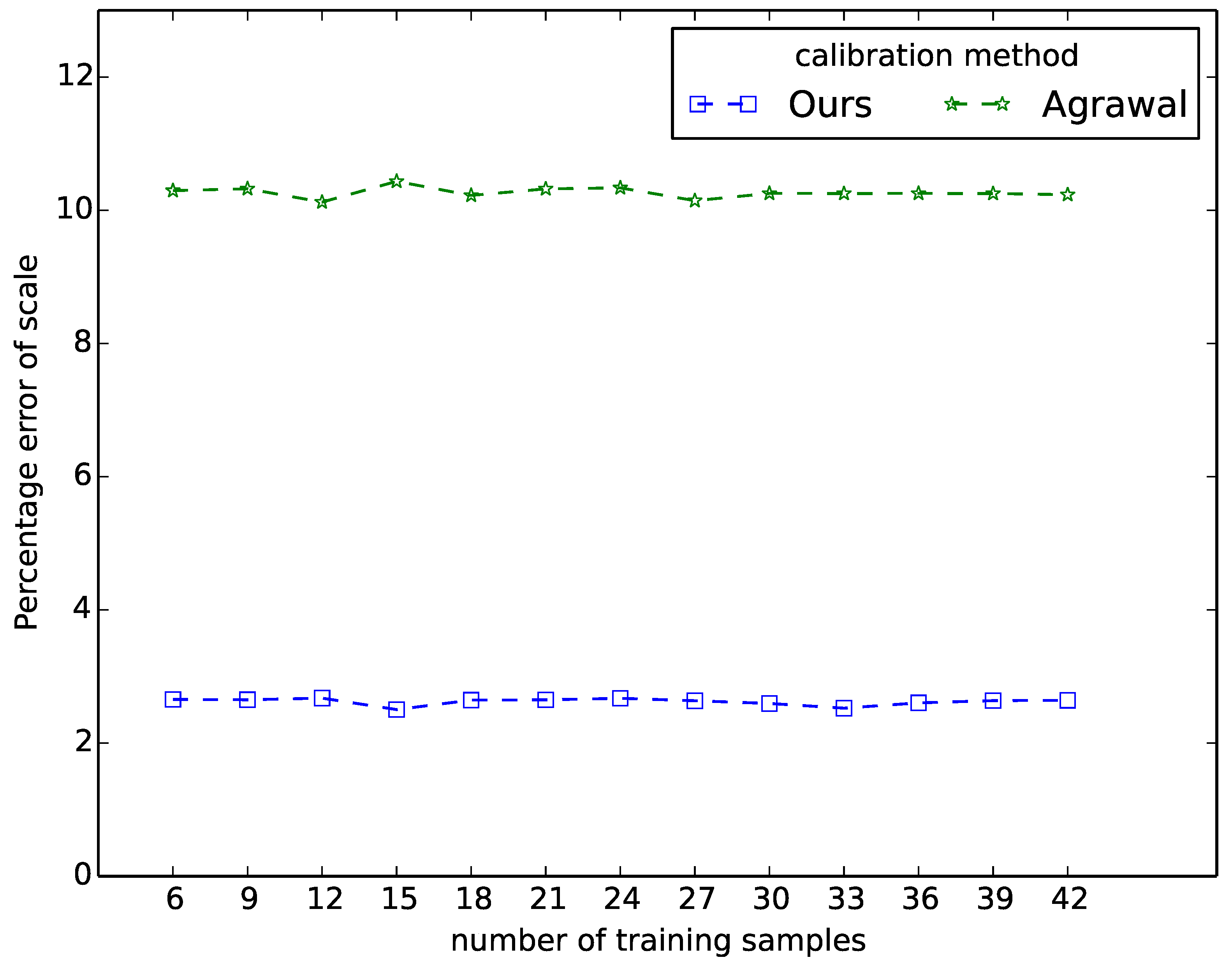
7.2. Comparison with Conics-based Sphere Calibration

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (pixel) | δrw (cm) | (pixel) | ||||
|---|---|---|---|---|---|---|
| Ours | Agrawal | Ours | Agrawal | Ours | Agrawal | |
| 06 | 6.2/3.6 | 12.3/3.0 | 5.1/2.3 | 8.5/2.2 | 4.2/3.4 | 9.8/2.5 |
| 09 | 5.3/1.1 | 11.6/2.0 | 4.6/0.6 | 8.3/1.6 | 3.4/1.0 | 9.2/1.5 |
| 12 | 5.2/0.8 | 10.9/1.5 | 4.6/0.4 | 8.1/1.3 | 3.2/0.6 | 8.6/1.0 |
| 15 | 5.0/0.5 | 11.0/1.3 | 4.5/0.3 | 8.3/1.2 | 3.0/0.4 | 8.5/0.9 |
| 18 | 5.0/0.6 | 10.7/1.0 | 4.5/0.3 | 8.1/0.9 | 3.0/0.4 | 8.4/0.6 |
| 21 | 4.9/0.4 | 10.7/1.0 | 4.5/0.2 | 8.1/0.9 | 2.9/0.3 | 8.3/0.7 |
| 24 | 4.9/0.3 | 10.6/0.8 | 4.5/0.2 | 8.1/0.8 | 2.8/0.2 | 8.2/0.5 |
| 27 | 4.8/0.3 | 10.3/0.6 | 4.4/0.2 | 7.9/0.6 | 2.7/0.2 | 8.1/0.4 |
| 30 | 4.8/0.2 | 10.4/0.5 | 4.5/0.1 | 8.0/0.5 | 2.7/0.1 | 8.1/0.3 |
| 33 | 4.8/0.2 | 10.4/0.5 | 4.4/0.1 | 8.0/0.5 | 2.7/0.1 | 8.1/0.3 |
| 36 | 4.8/0.1 | 10.4/0.4 | 4.4/0.1 | 8.0/0.4 | 2.7/0.1 | 8.1/0.3 |
| 39 | 4.8/0.1 | 10.3/0.3 | 4.4/0.1 | 8.0/0.3 | 2.6/0.1 | 8.0/0.2 |
| 42 | 4.7/0.1 | 10.3/0.2 | 4.4/0.1 | 8.0/0.2 | 2.6/0.1 | 8.0/0.1 |
7.3. Comparison with Epipolar Geometry Based Calibration
| Rank-4 | Orthogonal Procrustes | Refinement | Svoboda | |
|---|---|---|---|---|
| 03 | N/A | 6.4/1.8 | 5.3/1.4 | N/A |
| 04 | 7.9/5.4 | 5.8/1.4 | 3.5/0.7 | N/A |
| 05 | 6.5/2.3 | 5.5/1.4 | 3.2/0.3 | N/A |
| 06 | 6.4/2.3 | 5.5/1.5 | 3.2/0.2 | N/A |
| 07 | 6.3/1.8 | 5.6/1.4 | 3.1/0.1 | N/A |
| 08 | 6.0/1.6 | 5.3/1.3 | 3.1/0.1 | 4.1/2.0 |
| 09 | 6.2/1.8 | 5.4/1.3 | 3.1/0.1 | 3.6/0.6 |
| 12 | 6.4/1.7 | 5.2/0.7 | 3.1/0.0 | 3.3/0.3 |
| 15 | 6.2/1.3 | 5.1/0.6 | 3.1/0.0 | 3.3/0.2 |
| 18 | 6.2/1.0 | 5.0/0.5 | 3.1/0.0 | 3.3/0.1 |
| 21 | 6.0/0.8 | 4.9/0.3 | 3.1/0.0 | 3.2/0.1 |
| 24 | 6.0/0.7 | 4.9/0.3 | 3.1/0.0 | 3.2/0.1 |
| 27 | 6.0/0.5 | 4.8/0.2 | 3.1/0.0 | 3.2/0.1 |
| 30 | 6.0/0.5 | 4.8/0.2 | 3.1/0.0 | 3.2/0.1 |
| Rank-4 | Orthogonal Procrustes | Refinement | Svoboda | |
|---|---|---|---|---|
| 03 | N/A | 4.8/0.8 | 4.5/0.7 | N/A |
| 04 | 5.5/1.6 | 4.7/0.7 | 3.5/0.4 | N/A |
| 05 | 5.1/0.9 | 4.5/0.6 | 3.4/0.2 | N/A |
| 06 | 5.2/1.1 | 4.6/0.7 | 3.4/0.1 | N/A |
| 07 | 5.2/1.0 | 4.7/0.7 | 3.3/0.1 | N/A |
| 08 | 5.0/0.8 | 4.5/0.6 | 3.3/0.0 | 4.2/1.6 |
| 09 | 5.2/0.9 | 4.6/0.7 | 3.3/0.1 | 3.8/0.6 |
| 12 | 5.3/0.9 | 4.5/0.4 | 3.3/0.0 | 3.6/0.3 |
| 15 | 5.3/0.7 | 4.5/0.4 | 3.3/0.0 | 3.6/0.2 |
| 18 | 5.3/0.6 | 4.5/0.3 | 3.3/0.0 | 3.5/0.1 |
| 21 | 5.2/0.5 | 4.5/0.2 | 3.3/0.0 | 3.5/0.1 |
| 24 | 5.2/0.4 | 4.5/0.2 | 3.3/0.0 | 3.5/0.1 |
| 27 | 5.3/0.4 | 4.5/0.2 | 3.3/0.0 | 3.5/0.1 |
| 30 | 5.3/0.3 | 4.5/0.2 | 3.3/0.0 | 3.4/0.1 |
| Rank-4 | Orthogonal Procrustes | Refinement | Svoboda | |
|---|---|---|---|---|
| 03 | N/A | 4.5/1.7 | 3.3/1.6 | N/A |
| 04 | 6.1/5.5 | 3.9/1.3 | 1.2/0.8 | N/A |
| 05 | 4.8/2.5 | 3.6/1.3 | 0.7/0.4 | N/A |
| 06 | 4.6/2.3 | 3.6/1.4 | 0.7/0.3 | N/A |
| 07 | 4.3/1.8 | 3.6/1.3 | 0.6/0.2 | N/A |
| 08 | 4.0/1.6 | 3.3/1.3 | 0.5/0.2 | 0.8/1.1 |
| 09 | 4.3/1.7 | 3.4/1.1 | 0.5/0.2 | 0.5/0.2 |
| 12 | 4.4/1.5 | 3.2/0.6 | 0.5/0.1 | 0.4/0.1 |
| 15 | 4.1/1.1 | 3.0/0.5 | 0.5/0.1 | 0.4/0.1 |
| 18 | 4.1/0.8 | 3.0/0.4 | 0.5/0.1 | 0.4/0.1 |
| 21 | 3.9/0.6 | 2.8/0.2 | 0.5/0.1 | 0.4/0.1 |
| 24 | 3.9/0.5 | 2.8/0.2 | 0.4/0.1 | 0.3/0.0 |
| 27 | 3.9/0.4 | 2.8/0.2 | 0.4/0.1 | 0.3/0.0 |
| 30 | 3.8/0.3 | 2.7/0.1 | 0.4/0.0 | 0.3/0.0 |
| (pixel) | δrw (cm) | (pixel) | |
|---|---|---|---|
| mean | 3.2 | 3.5 | 0.4 |
| std | 2.4 | 1.6 | 0.4 |
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sturm, P.; Triggs, B. A Factorization Based Algorithm for Multi-Image Projective Structure and Motion. In Proceedings of European Conference on Computer Vision, Cambridge, UK,, 14–18 April 1996; Volume II, pp. 709–720.
- Arun, K.; Huang, T.; Blostein, S. Least-squares fitting of two 3-D point sets. IEEE Trans. Pattern. Anal. Mach. Intell. 1987, 9, 698–700. [Google Scholar] [CrossRef] [PubMed]
- Bouguet, J.Y. Camera Calibration Toolbox for Matlab. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/ (accessed on 19 February 2015).
- Agrawal, M.; Davis, L.S. Camera calibration using spheres: A semi-definite programming approach. In Proceedings of IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 782–789.
- Svoboda, T.; Martinec, D.; Pajdla, T. A convenient multi-cameraself-calibration for virtual environments. PRESENCE Teleop. Virt. Environ. 2005, 14, 407–422. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2 ed.; Cambridge University Press: New York, NY, USA, 2003. [Google Scholar]
- Pollefeys, M.; Koch, R.; Van Gool, L. Self-calibration and metric reconstruction in spite of varying and unknown internal camera parameters. In Proceedings of International Conference on Computer Vision, Bombay, India, 4–7 January 1998; pp. 90–95.
- Triggs, B.; McLauchlan, P.; Hartley, R.; Fitzgibbon, A. Bundle Adjustment-A Modern Synthesis. In Vision Algorithms: Theory and Practice; Triggs, B., Zisserman, A., Szeliski, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2000; Volume 1883, Lecture Notes in Computer Science; pp. 298–372. [Google Scholar]
- Tsai, R.Y. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE Trans. Robot. Autom. 1987, 3, 323–344. [Google Scholar] [CrossRef]
- Faugeras, O.D.; Toscani, G. The calibration problem for stereo. In Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 22–26 June 1986; pp. 15–20.
- Hall, E.L.; Tio, J.; McPherson, C.; Sadjadi, F. Measuring curved surfaces for robot vision. Computer 1982, 15, 42–54. [Google Scholar] [CrossRef]
- Weng, J.; Cohen, P.; Herniou, M. Camera calibration with distortion models and accuracy evaluation. IEEE Trans. Pattern. Anal. Mach. Intell. 1992, 14, 965–980. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern. Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Ueshiba, T.; Tomita, F. Plane-based calibration algorithm for multi-camera systems via factorization of homography matrices. In Proceedings of IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 966–973.
- Aslan, C.T.; Bernardin, K.; Stiefelhagen, R. Automatic calibration of camera networks based on local motion features. In Proceedings of Workshop on Multi-camera and Multi-modal Sensor Fusion Algorithms and Applications, Marseille, France, 18 October 2008.
- Sinha, S.N.; Pollefeys, M.; McMillan, L. Camera network calibration from dynamic silhouettes. In Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004; Volume 1, pp. 195–202.
- Penna, M. Camera calibration: A quick and easy way to determine the scale factor. IEEE Trans. Pattern. Anal. Mach. Intell. 1991, 13, 1240–1245. [Google Scholar] [CrossRef]
- Eklundh, J.O. Camera calibration from spheres images. In European Conference on Computer Vision, 2–6 May 1994; Springer: Berlin/Heidelberg, Germany; Volume 800, Lecture Notes in Computer Science. pp. 447–454.
- Teramoto, H.; Xu, G. Camera calibration by a single image of balls: From conics to the absolute conic. In Proceedings of The Fifth Asian Conference on Computer Vision, Melbourne, Australia, 21–21 January 2002.
- Ying, X.; Zha, H. Geometric interpretations of the relation between the Image of the absolute conic and sphere images. IEEE Trans. Pattern. Anal. Mach. Intell. 2006, 28, 2031–2036. [Google Scholar] [CrossRef] [PubMed]
- Ying, X.; Zha, H. Linear approaches to camera calibration from sphere images or active intrinsic calibration using vanishing points. In Proceedings of IEEE International Conference on Computer Vision, Beijing, China, 17–20 October 2005; Volume 1, pp. 596–603.
- Zhang, H.; Wong, K.Y.; Zhang, G. Camera calibration from images of spheres. IEEE Trans. Pattern. Anal. Mach. Intell. 2007, 29, 499–502. [Google Scholar] [CrossRef] [PubMed]
- Eggert, D.W.; Lorusso, A.; Fisher, R.B. Estimating 3-D rigid body transformations: A comparison of fourmajor algorithms. Mach. Vision Appl. 1997, 9, 272–290. [Google Scholar] [CrossRef]
- Schönemann, P. A generalized solution of the orthogonal procrustes problem. Psychometrika 1966, 31, 1–10. [Google Scholar] [CrossRef]
- Hartley, R.; Sturm, P. Triangulation. In Computer Analysis of Images and Patterns; Hlaváč, V., Šára, R., Eds.; Springer: Berlin/Heidelberg, Germany, 1995; Volume 970, Lecture Notes in Computer Science; pp. 190–197. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, J.; Deboeverie, F.; Slembrouck, M.; Van Haerenborgh, D.; Van Cauwelaert, D.; Veelaert, P.; Philips, W. Extrinsic Calibration of Camera Networks Using a Sphere. Sensors 2015, 15, 18985-19005. https://doi.org/10.3390/s150818985
Guan J, Deboeverie F, Slembrouck M, Van Haerenborgh D, Van Cauwelaert D, Veelaert P, Philips W. Extrinsic Calibration of Camera Networks Using a Sphere. Sensors. 2015; 15(8):18985-19005. https://doi.org/10.3390/s150818985
Chicago/Turabian StyleGuan, Junzhi, Francis Deboeverie, Maarten Slembrouck, Dirk Van Haerenborgh, Dimitri Van Cauwelaert, Peter Veelaert, and Wilfried Philips. 2015. "Extrinsic Calibration of Camera Networks Using a Sphere" Sensors 15, no. 8: 18985-19005. https://doi.org/10.3390/s150818985
APA StyleGuan, J., Deboeverie, F., Slembrouck, M., Van Haerenborgh, D., Van Cauwelaert, D., Veelaert, P., & Philips, W. (2015). Extrinsic Calibration of Camera Networks Using a Sphere. Sensors, 15(8), 18985-19005. https://doi.org/10.3390/s150818985