
Comparison of sEMG-Based Feature Extraction and Motion Classification Methods for Upper-Limb Movement


Abstract
:1. Introduction
2. Methods
2.1. The WPT-Based RMS Feature Extraction Method
2.2. WPT Based Weight Peaks Feature Extraction Method
2.3. Detrended Fluctuation Analysis
2.4. Muscular Model Based Feature Extraction Method

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Extraction Method | ||||
|---|---|---|---|---|
| Feature Numbers | RMS | WP | DFA | MM |
| 40 | ≈900 | 10 | 1000 | |
2.5. Classification Method
3. Experimental Results
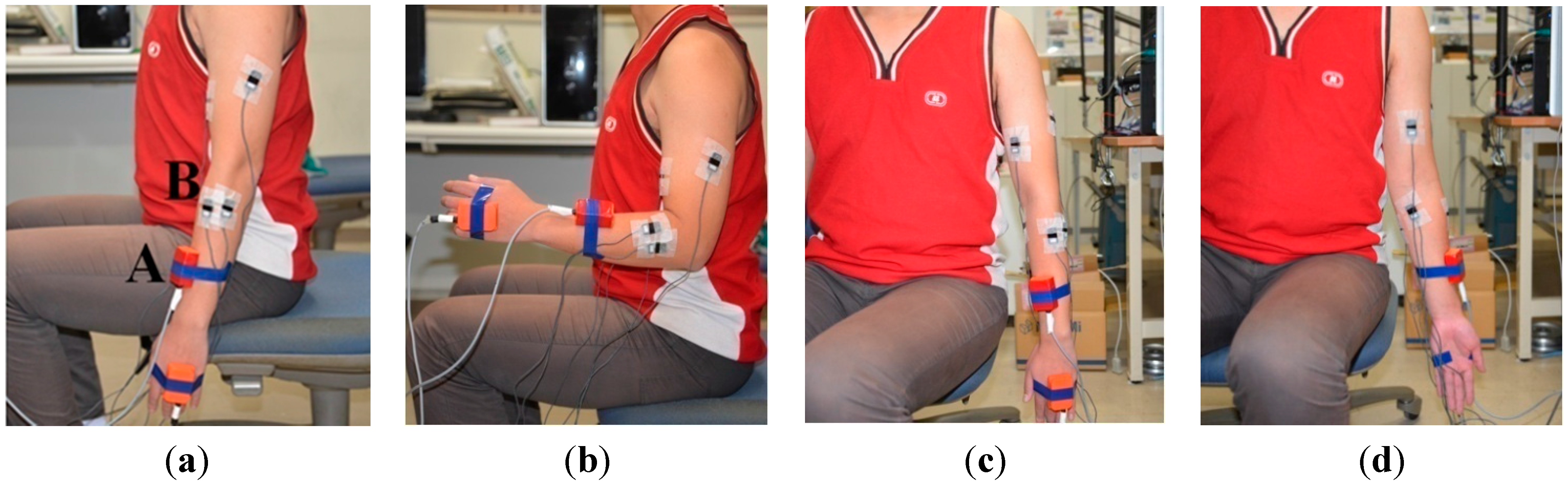
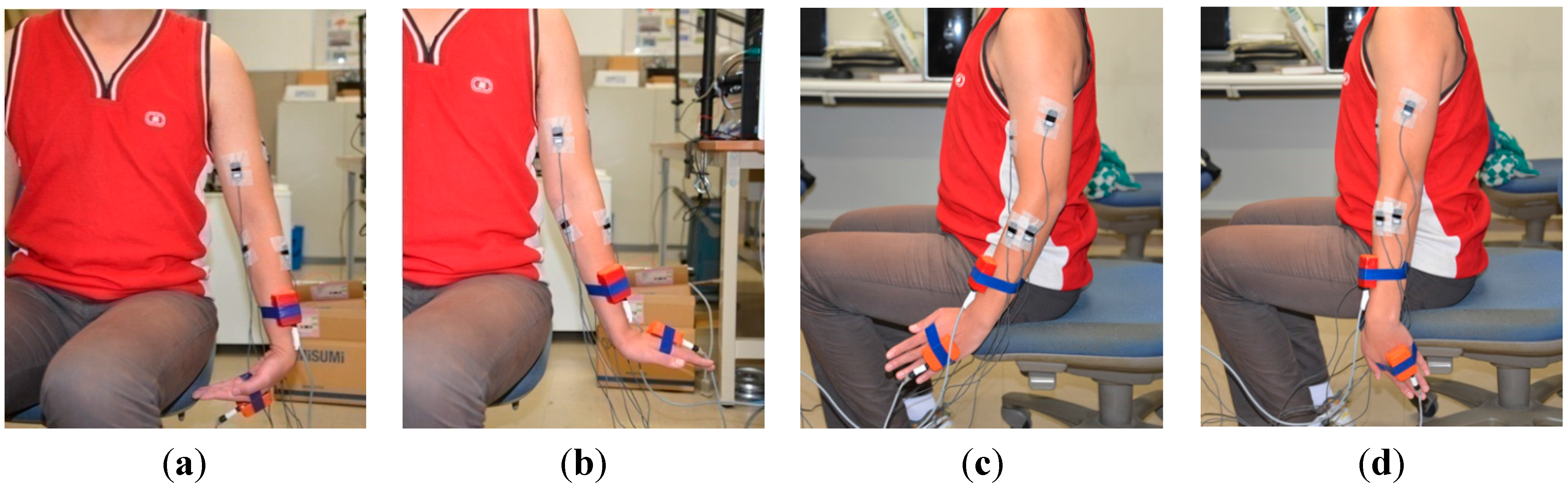
3.1. Experimental Setup
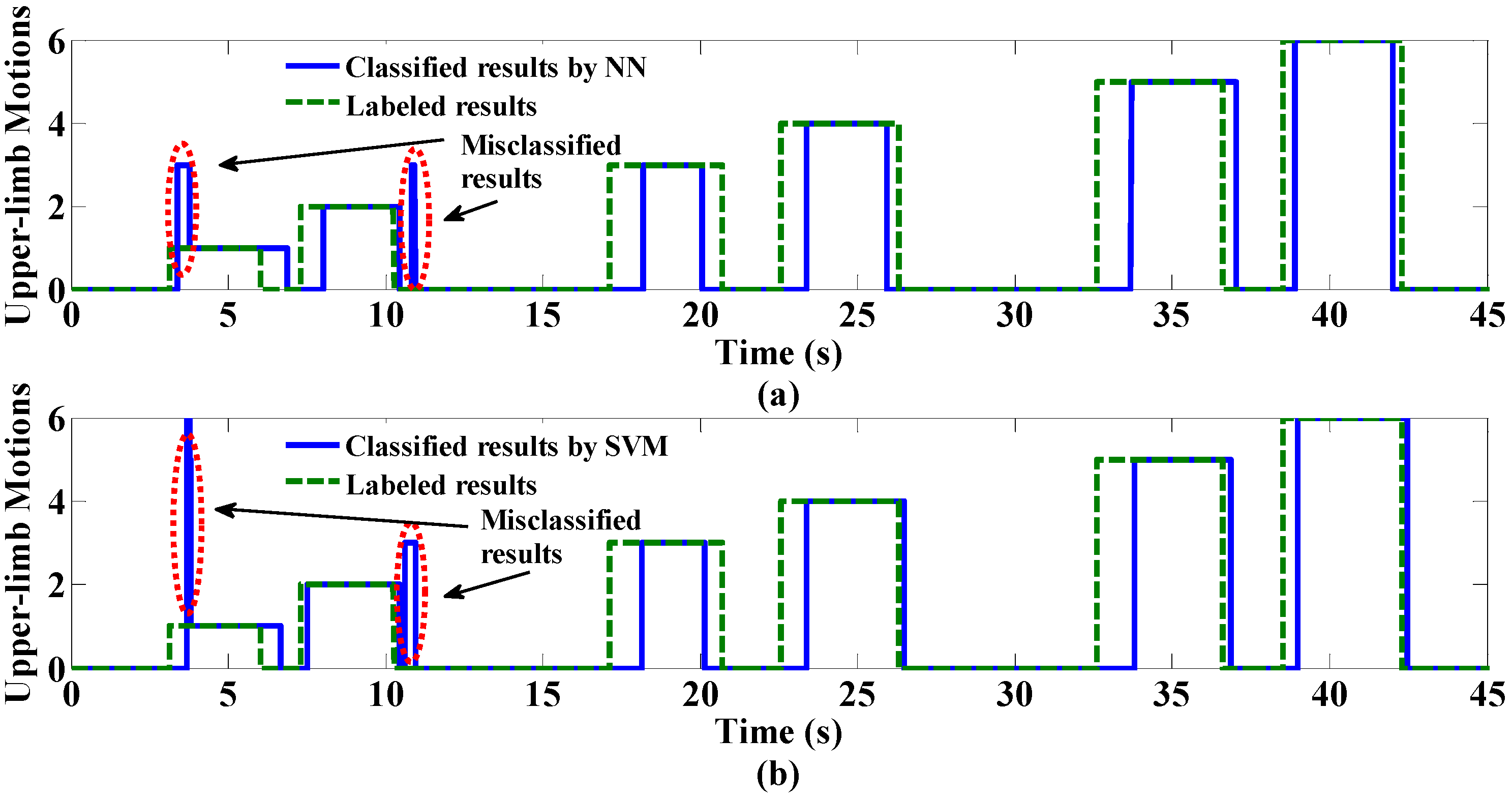
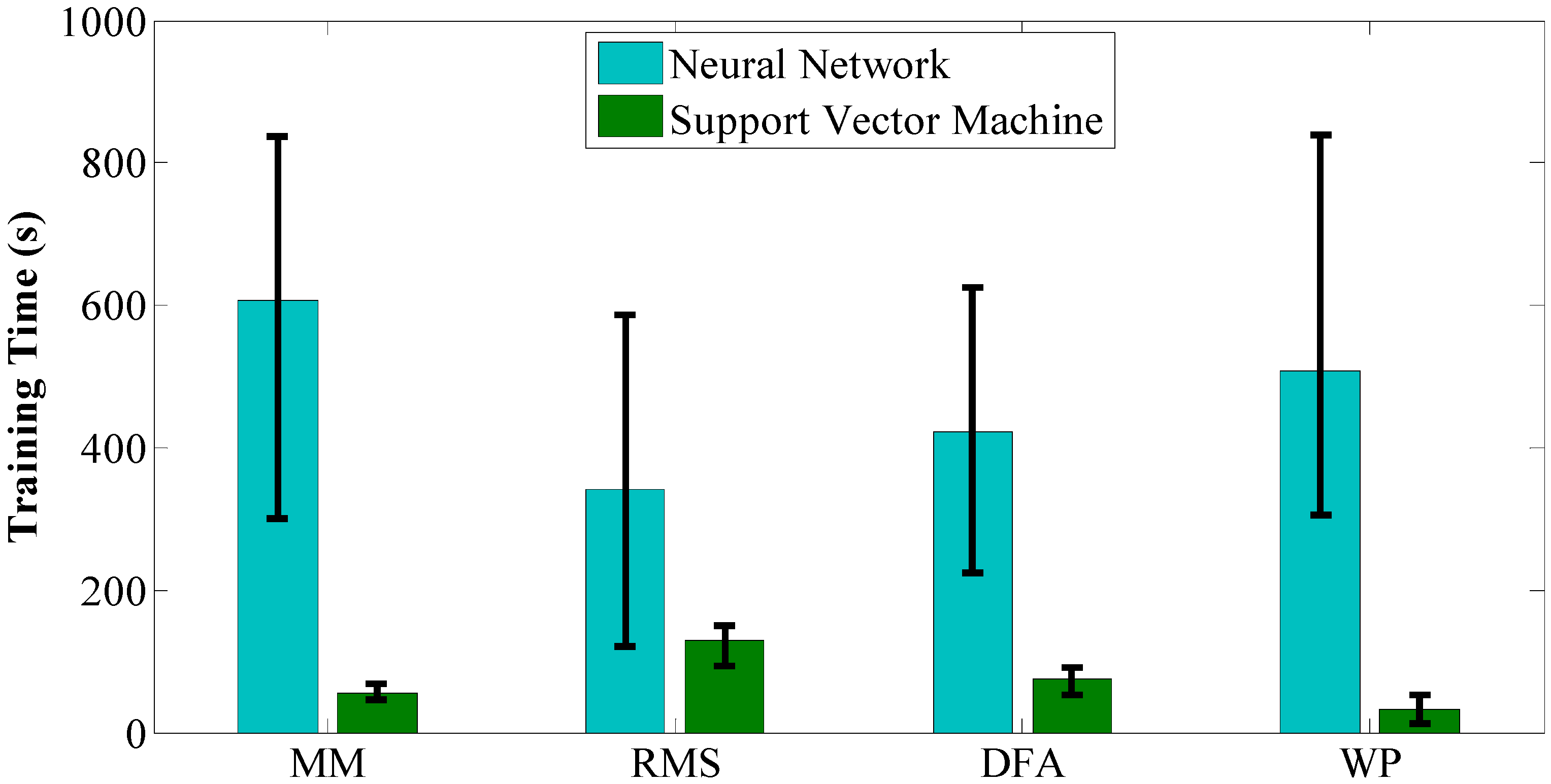
3.2. Experimental Results
| Subject (NN/SVM) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Features | A | B | C | D | E | F | G | Average |
| RMS | 75.2/74.2 | 70.7/66.8 | 82.2/80.5 | 81.2/78.9 | 76.1/71.5 | 70.1/69.7 | 73.3/70.1 | 75.5/73.1 |
| RMSF | 87.0/82.0 | 84.1/83.5 | 90.6/89.5 | 89.6/86.8 | 86.5/85.4 | 82.1/80.2 | 85.1/81.2 | 86.4/84.0 |
| WP | 98.4/97.6 | 97.2/94.1 | 97.7/94.5 | 98.9/96.8 | 97.5/95.2 | 97.5/94.5 | 96.5/92.5 | 97.7/95.0 |
| MM | 98.8/98.0 | 95.7/90.9 | 94.1/91.8 | 91.4/88.3 | 93.1/90.14 | 95.3/93.4 | 97.3/95.4 | 95.1/92.6 |
| Subject (NN/SVM) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Features | A | B | C | D | E | F | G | Average |
| RMS | 70.2/74.1 | 68.7/68.8 | 80.1/81.5 | 77.1/78.0 | 72.1/73.5 | 70.0/71.1 | 69.1/71.2 | 72.5/74.0 |
| DFA | 79.3/83.0 | 80.1/84.3 | 82.3/87.1 | 81.1/85.3 | 79.1/81.3 | 75.1/81.1 | 77.7/80.2 | 79.2/83.2 |
| WP | 93.4/95.6 | 92.2/93.1 | 93.1/94.1 | 91.1/93.2 | 91.3/94.5 | 91.5/94.7 | 90.5/93.1 | 90.1/92.0 |
| MM | 94.8/97.0 | 91.1/93.0 | 92.1/95.8 | 93.3/90.3 | 89.1/92.1 | 89.3/92.4 | 92.3/96.4 | 92.1/94.3 |
| Subject (WP + SVM) | |||||||
|---|---|---|---|---|---|---|---|
| Motion | A | B | C | D | E | F | G |
| P/S | 91.3/97.8 | 98.7/94.4 | 96.6/97.1 | 94.1/97.3 | 93.2/95.5 | 96.4/92.1 | 98.3/90.1 |
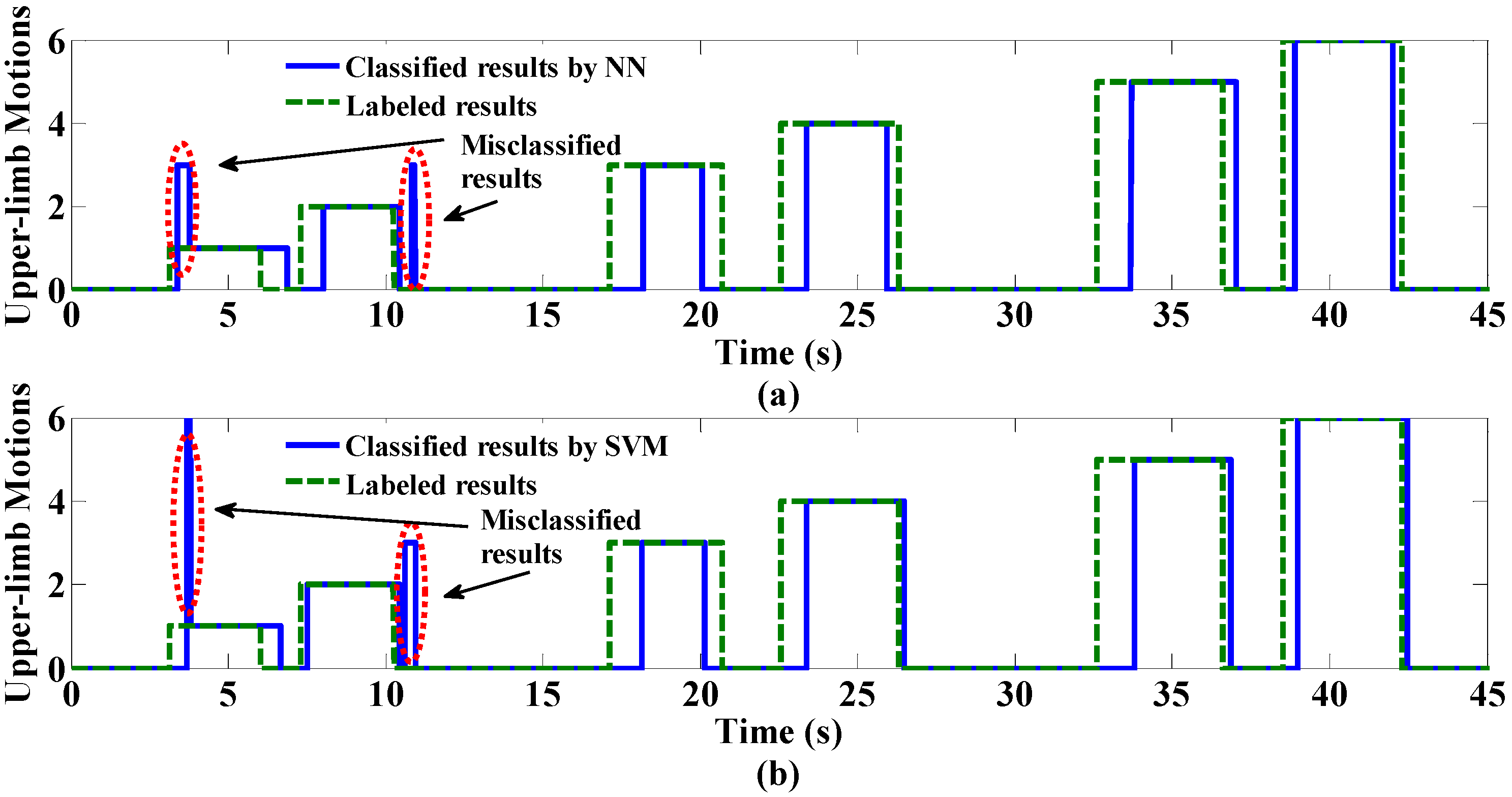
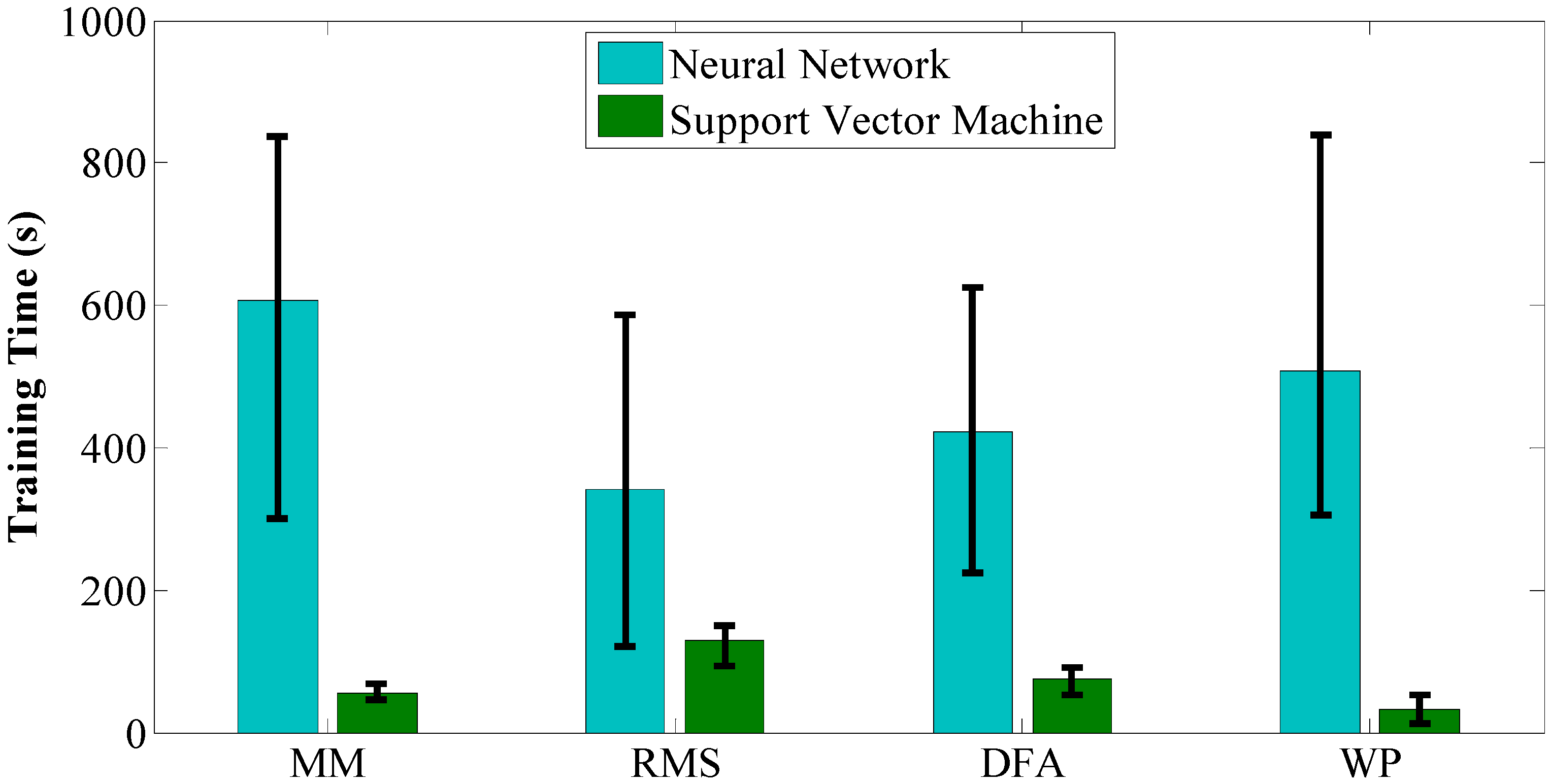

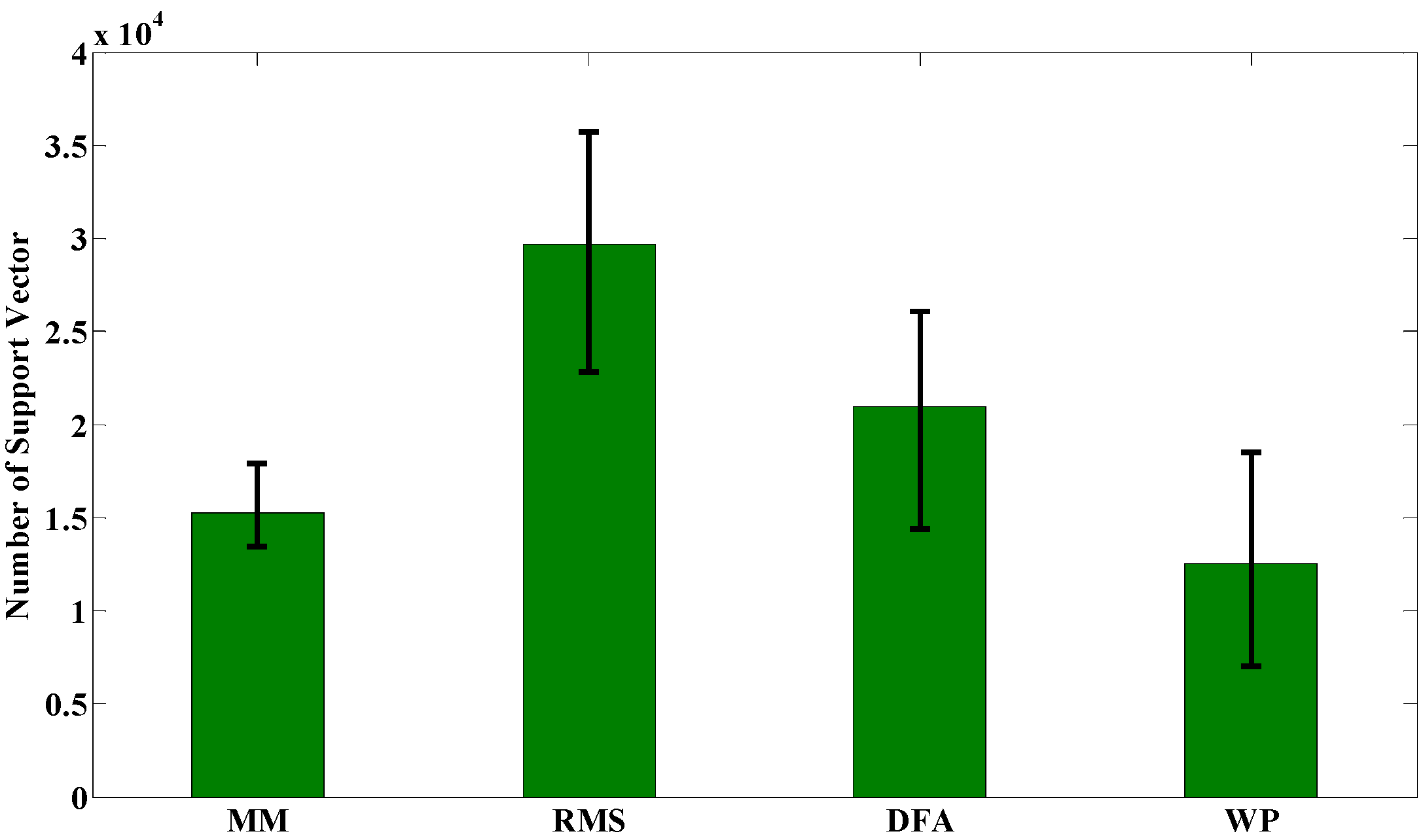
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fukuda, O.; Tsuji, T.; Otsuka, A. A Human-Assisting Manipulator Teleoperated by EMG Signals and Arm Motions. IEEE Trans. Robot. Autom. 2003, 19, 210–222. [Google Scholar] [CrossRef]
- Liarokapis, M.V.; Artemiadis, P.K.; Katsiaris, P.T.; Kyriakopoulos, K.J.; Manolakos, E.S. Learning Human Reach-to-Grasp Strategies: Towards EMG-Based Control of Robotic Arm-Hand Systems. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2287–2292.
- Chen, X.; Wang, Z.J. Pattern Recognition of Number Gestures Based on a Wireless Surface EMG System. Biomed. Signal Process. Control. 2013, 8, 184–192. [Google Scholar] [CrossRef]
- Pang, M.; Guo, S.; Song, Z. Study on the sEMG Driven Upper Limb Exoskeleton Rehabilitation Device in Bilateral Rehabilitation. J. Robot. Mechatron. 2012, 24, 585–594. [Google Scholar]
- Pang, M.; Guo, S.; Song, Z.; Zhang, S. A Surface EMG Signals-Based Real-time Continuous Recognition for the Upper Limb Multi-motion. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 1984–1989.
- Ju, Z.; Ouyang, G.; Wilamowska-Korsak, M.; Liu, H. Surface EMG Based Hand Manipulation Identification via Nonlinear Feature Extraction and Classification. IEEE Sens. J. 2013, 13, 3302–3311. [Google Scholar] [CrossRef]
- Artemiadis, P.K.; Kyriakopoulos, K.J. A Switching Regime Model for the EMG-Based Control of a Robot Arm. IEEE Trans. Syst. Man Cybern. B Cybern. 2010, 41, 53–63. [Google Scholar] [CrossRef]
- Balbinot, A.; Favieiro, G. A Neuro-Fuzzy System for Characterization of Arm Movements. Sensors 2013, 13, 2613–2630. [Google Scholar] [CrossRef] [PubMed]
- Alkan, A.; Günay, M. Identification of EMG Signals Using Discriminant Analysis and SVM Classifier. Expert Syst. Appl. 2012, 39, 44–47. [Google Scholar] [CrossRef]
- Young, A.J.; Smith, L.H.; Rouse, E.J.; Hargrove, L.J. Classification of Simultaneous Movements Using Surface EMG Pattern Recognition. IEEE Trans. Biomed. Eng. 2013, 60, 1250–1258. [Google Scholar] [CrossRef] [PubMed]
- Shibanoki, T.; Shima, K.; Tsuji, T.; Otsuka, A.; Chin, T. A Quasi-Optimal Channel Selection Method for Bioelectric Signal Classification Using a Partial Kullback-Leibler Information Measure. IEEE Trans. Biomed. Eng. 2013, 60, 853–861. [Google Scholar] [CrossRef] [PubMed]
- Naik, G.R.; Kumar, D.K. Subtle Electromyographic Pattern Recognition for Finger Movements: A Pilot Study Using BSS Techniques. J. Mech. Med. Biol. 2012, 12, 1–19. [Google Scholar] [CrossRef]
- Naik, G.R.; Kumar, D.K. Identification of Hand and Finger Movements Using Multi Run ICA of Surface Electromyogram. J. Med. Syst. 2012, 36, 841–851. [Google Scholar] [CrossRef] [PubMed]
- Naik, G.R.; Nguyen, H.T. Non Negative Matrix Factorisation for the Identification of EMG Finger Movements: Evaluation Using Matrix Analysis. IEEE J. Biomed. Health Inf. 2015, 19, 478–485. [Google Scholar] [CrossRef]
- Naik, G.R.; Nguyen, H.T.; Palaniswami, M. Signal Processing Evaluation of Myoelectric Sensor Placement in Low-Level Gestures: Sensitivity Analysis Using Independent Component Analysis. Expert Syst. 2014, 31, 91–99. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, X.; Li, Y.; Lantz, V.; Wang, K.; Yang, J. A Framework for Hand Gesture Recognition Based on Accelerometer and EMG Sensors. IEEE Trans. Syst. Man Cybern. A Syst. Hum. 2011, 41, 1064–1076. [Google Scholar] [CrossRef]
- Tang, X.; Liu, Y.; Lv, C.; Sun, D. Hand Motion Classification Using a Multi-Channel Surface Electromyography Sensor. Sensors 2012, 12, 1130–1147. [Google Scholar] [CrossRef]
- Rafiee, J.; Rafiee, M.A.; Yavari, F.; Schoen, M.P. Feature Extraction of Forearm EMG Signals for Prosthetics. Expert Syst. Appl. 2011, 38, 4058–4067. [Google Scholar] [CrossRef]
- Huxley, A.F. Muscle Structure and Theories of Contraction. Prog. Biophys. Biophys. Chem. 1957, 7, 255–318. [Google Scholar] [PubMed]
- Huxley, A.F.; Simmons, R.M. Proposed Mechanism of Force Generation in Striated Muscle. Nature 1971, 233, 533–538. [Google Scholar] [CrossRef] [PubMed]
- Hill, A.V. The Heat of Shortening and the Dynamic Constants of Muscle. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1938, 126, 136–195. [Google Scholar] [CrossRef]
- Cavallaro, E.; Rosen, J.; Perry, J.C.; Burns, S.; Hannaford, B. Hill-Based Model as a Myoprocessor for a Neural Controlled Powered Exoskeleton Arm-Parameters Optimization. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 4525–4530.
- Pang, M.; Guo, S.; Ishihara, H.; Hirata, H. Electromyography-Based Quantitative Representation Method for Upper-Limb Elbow Joint Angle in Sagittal Plane. J. Med. Biol. Eng. 2015, in press. [Google Scholar]
- Manal, K.; Buchanan, T.S. A One-Parameter Neural Activation to Muscle Activation Model: Estimating Isometric Joint Moments from Electromyograms. J. Biomech. 2003, 36, 1197–1202. [Google Scholar] [CrossRef] [PubMed]
- Song, Z.; Guo, S.; Pang, M.; Zhang, S. Study on Recognition of Upper Limb Motion Pattern Using Surface EMG Signals for Bilateral Rehabilitation. In Proceedings of the 23rd 2012 International Symposium on Micro-Nano Mechatronics and Human Science, Nagoya, Japan, 4–7 November 2012; pp. 425–430.
- Peng, C.K.; Havlin, S.; Stanley, H.E.; Goldberger, A.L. Quantification of Scaling Exponents and Crossover Phenomena in Nonstationary Heartbeat Time Series. Chaos 1995, 5, 82–87. [Google Scholar] [CrossRef] [PubMed]
- Buchanan, T.S.; Lloyd, D.G.; Manal, K.; Besier, T.F. Neuromusculoskeletal Modeling: Estimation of Muscle Forces and Joint Moments and Movements from Measurements of Neural Command. J. Appl. Biomech. 2004, 20, 367–395. [Google Scholar] [PubMed]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar]
- Platt, J.C. Fast Training of Support Vector Machines Using Sequential Minimal Optimization. In Advances in Kernel Methods-Support Vector Learning; Scholkopf, B., Burges, C.J.C., Smola, A.J., Eds.; The MIT Press: Cambridge, MA, USA, 1998; pp. 185–208. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006; pp. 325–356. [Google Scholar]
- SENIAM Project. Available online: http://www.seniam.org/ (accessed on 8 December 2014).
- Lew, H.L.; Tsai, S.J. Johnson’s Practical Electromyography, 4th ed.; Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2007; pp. 156–180. [Google Scholar]
- Chang, C.C.; Lin, C.J. LIBSVM: A Library for Support Vector Machines. ACM Trans. Intell. Syst. Technol. 2011, 2. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, S.; Pang, M.; Gao, B.; Hirata, H.; Ishihara, H. Comparison of sEMG-Based Feature Extraction and Motion Classification Methods for Upper-Limb Movement. Sensors 2015, 15, 9022-9038. https://doi.org/10.3390/s150409022
Guo S, Pang M, Gao B, Hirata H, Ishihara H. Comparison of sEMG-Based Feature Extraction and Motion Classification Methods for Upper-Limb Movement. Sensors. 2015; 15(4):9022-9038. https://doi.org/10.3390/s150409022
Chicago/Turabian StyleGuo, Shuxiang, Muye Pang, Baofeng Gao, Hideyuki Hirata, and Hidenori Ishihara. 2015. "Comparison of sEMG-Based Feature Extraction and Motion Classification Methods for Upper-Limb Movement" Sensors 15, no. 4: 9022-9038. https://doi.org/10.3390/s150409022
APA StyleGuo, S., Pang, M., Gao, B., Hirata, H., & Ishihara, H. (2015). Comparison of sEMG-Based Feature Extraction and Motion Classification Methods for Upper-Limb Movement. Sensors, 15(4), 9022-9038. https://doi.org/10.3390/s150409022