
A Guided Wave Sensor Based on the Inverse Magnetostrictive Effect for Distinguishing Symmetric from Asymmetric Features in Pipes



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
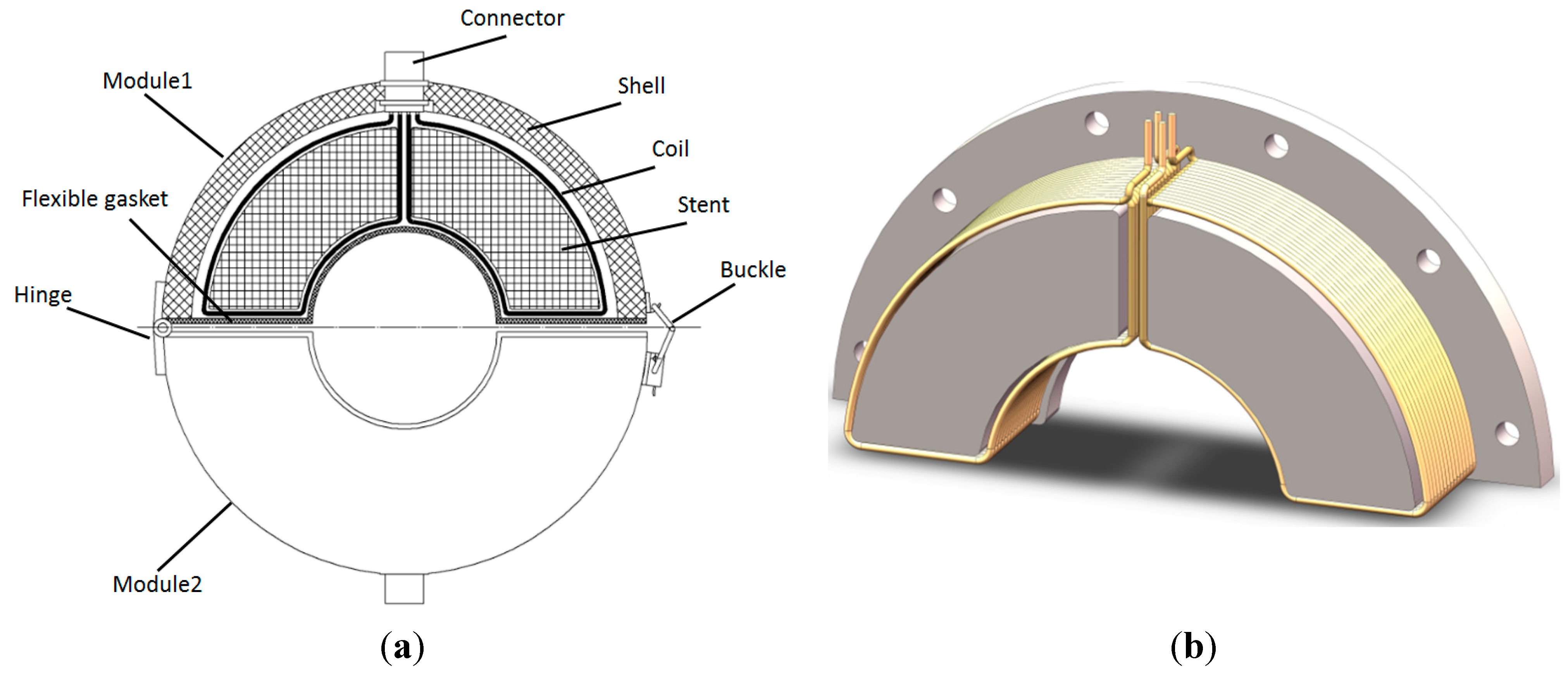
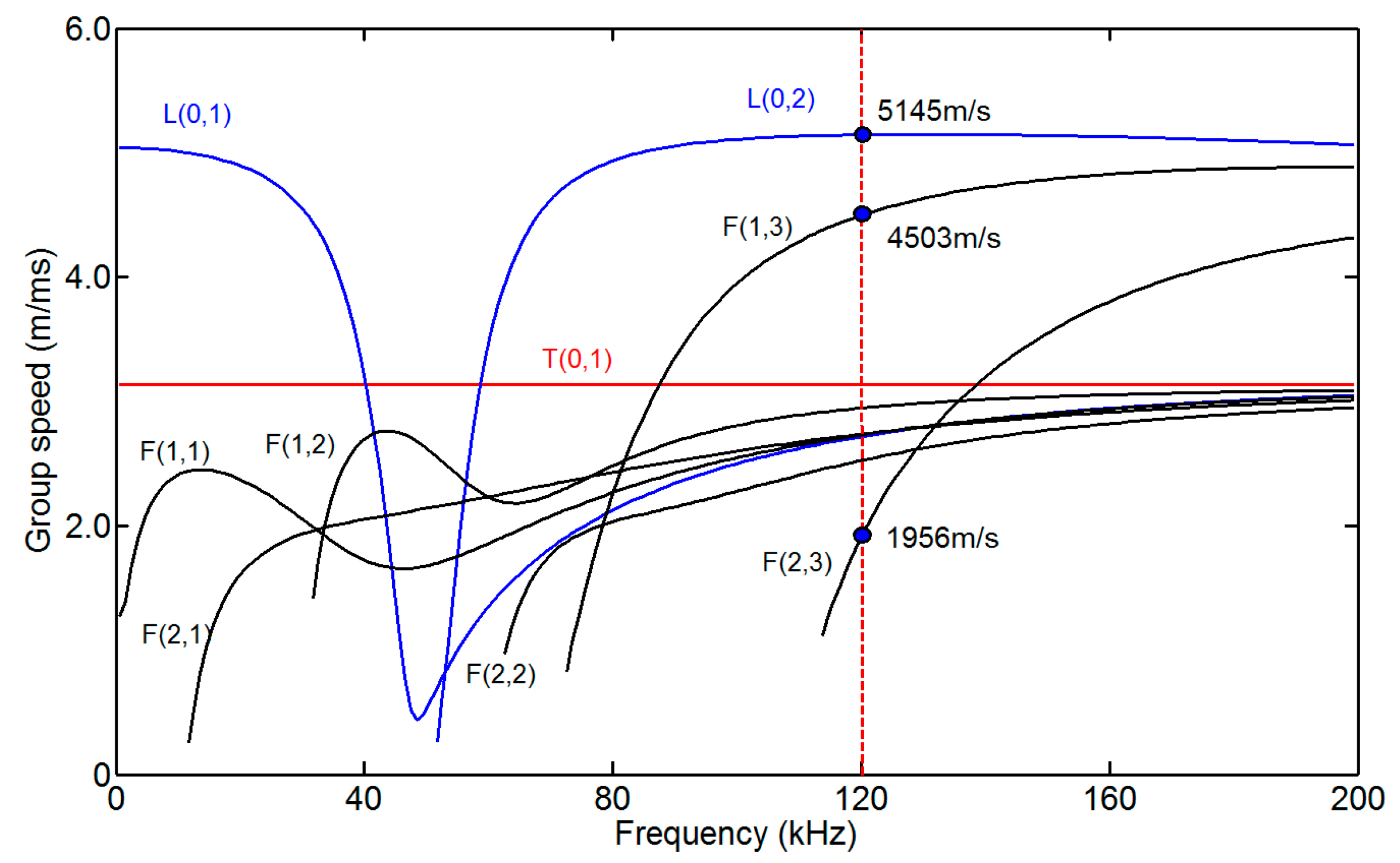
2. Operating Principle of the Sensor

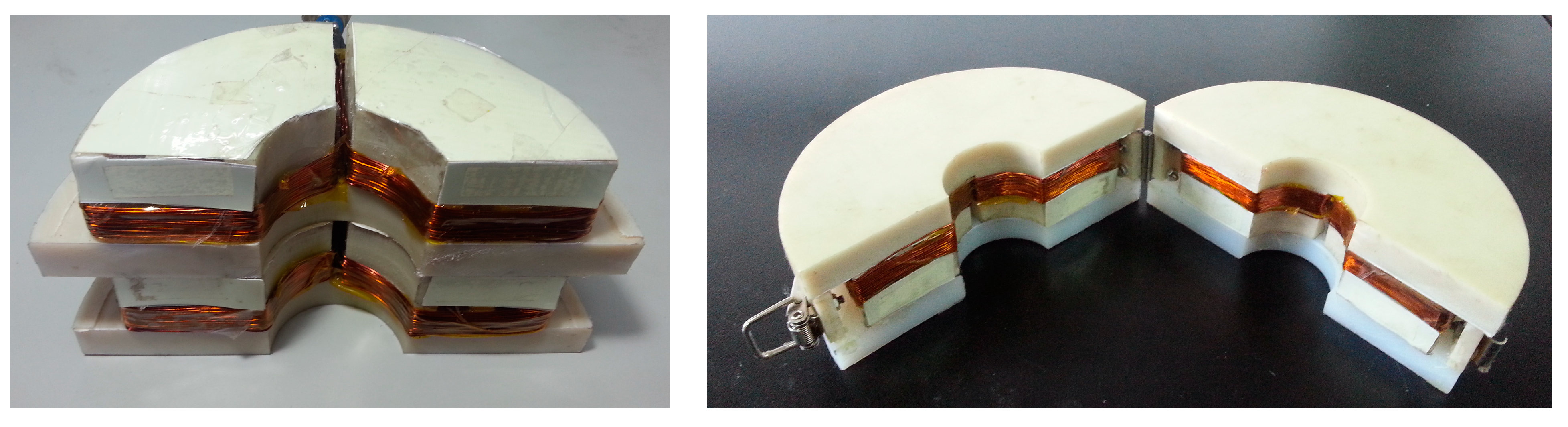
3. Prototype Sensor
4. Experimental Verification
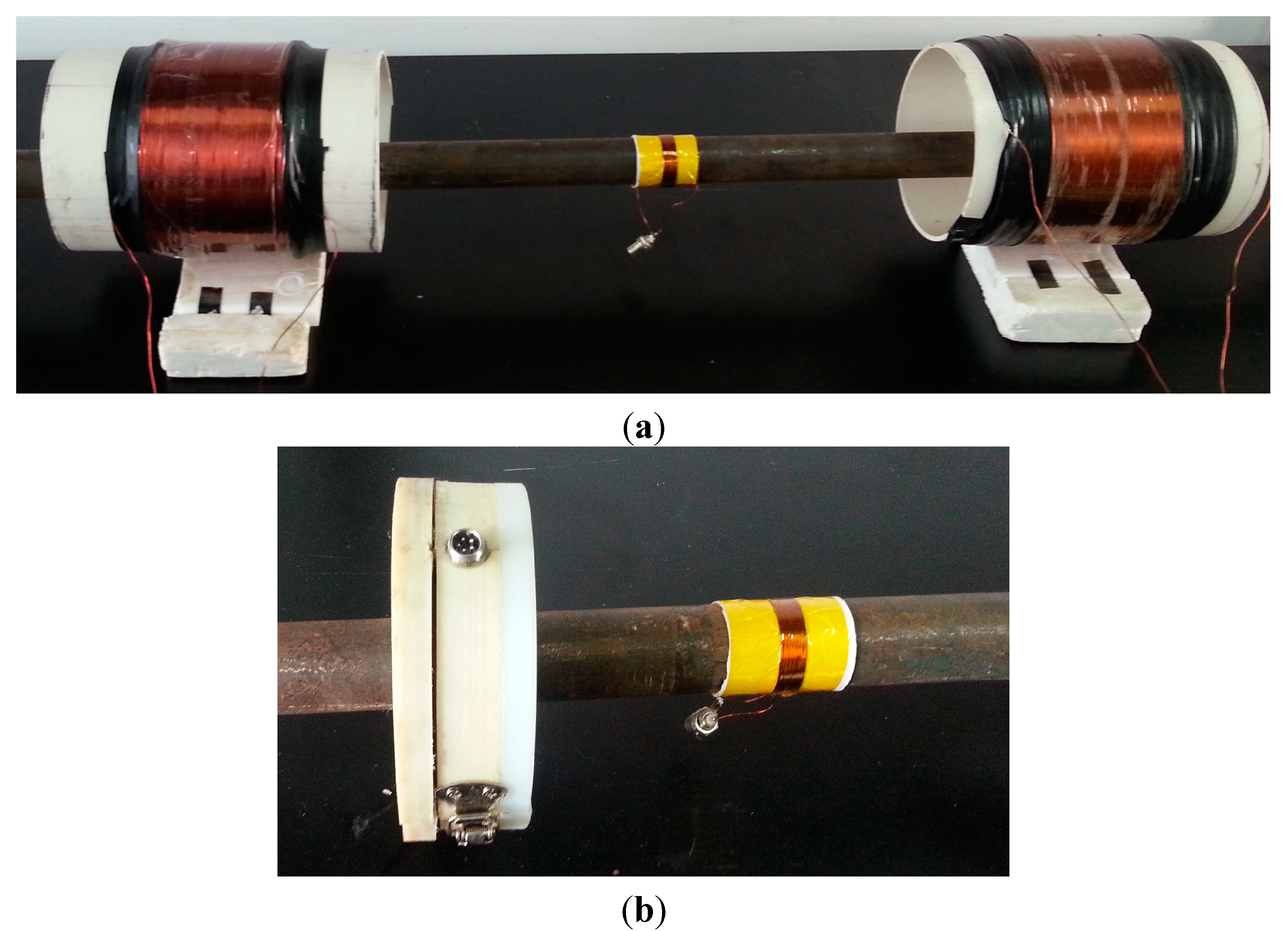
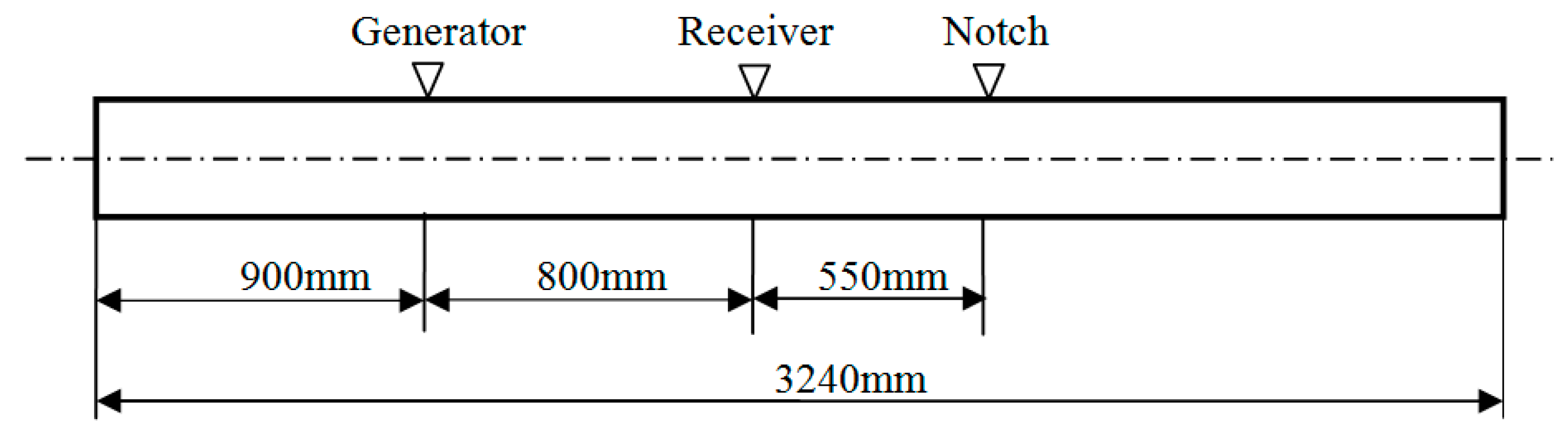
4.1. Experimental Setup

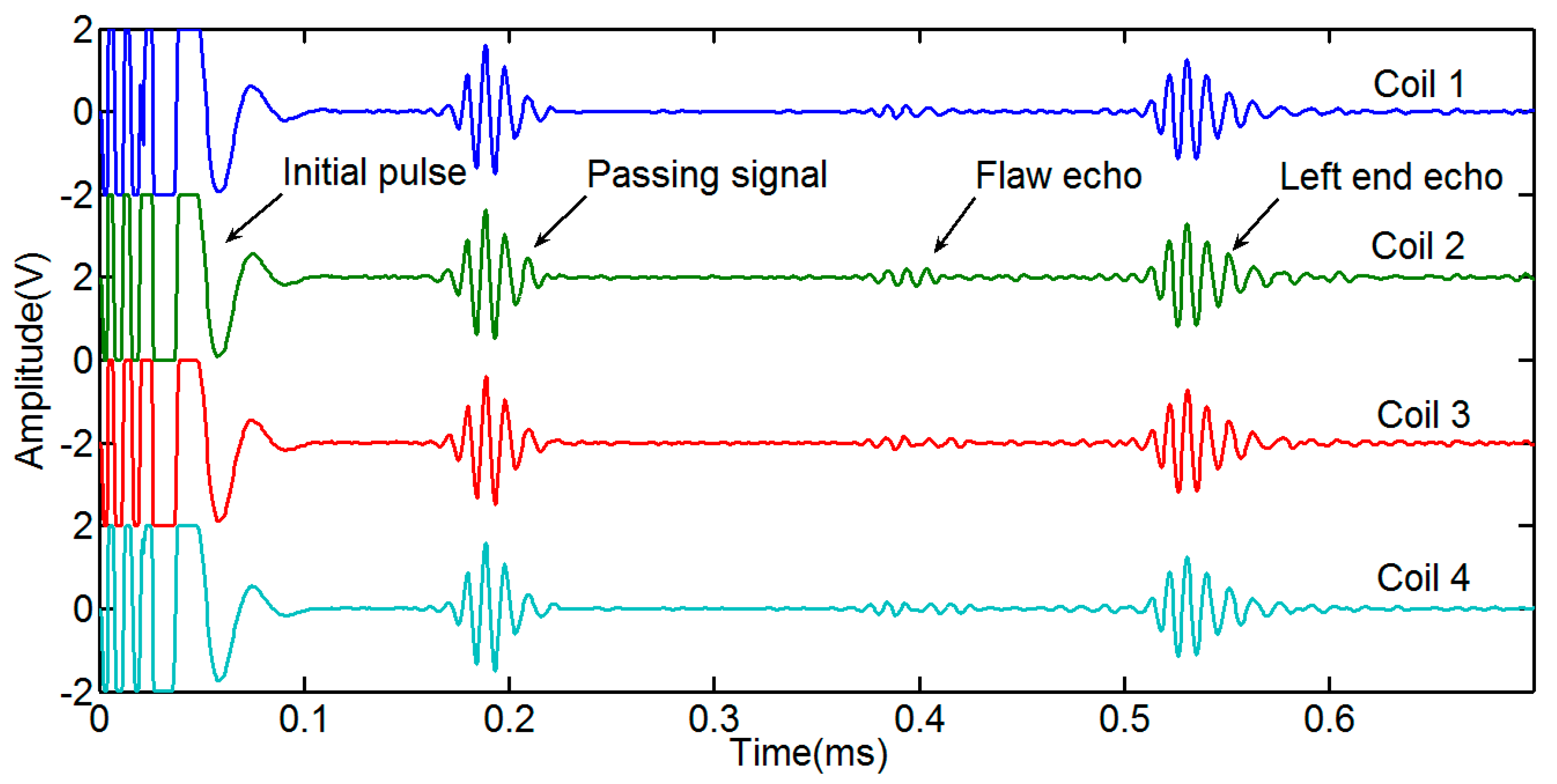
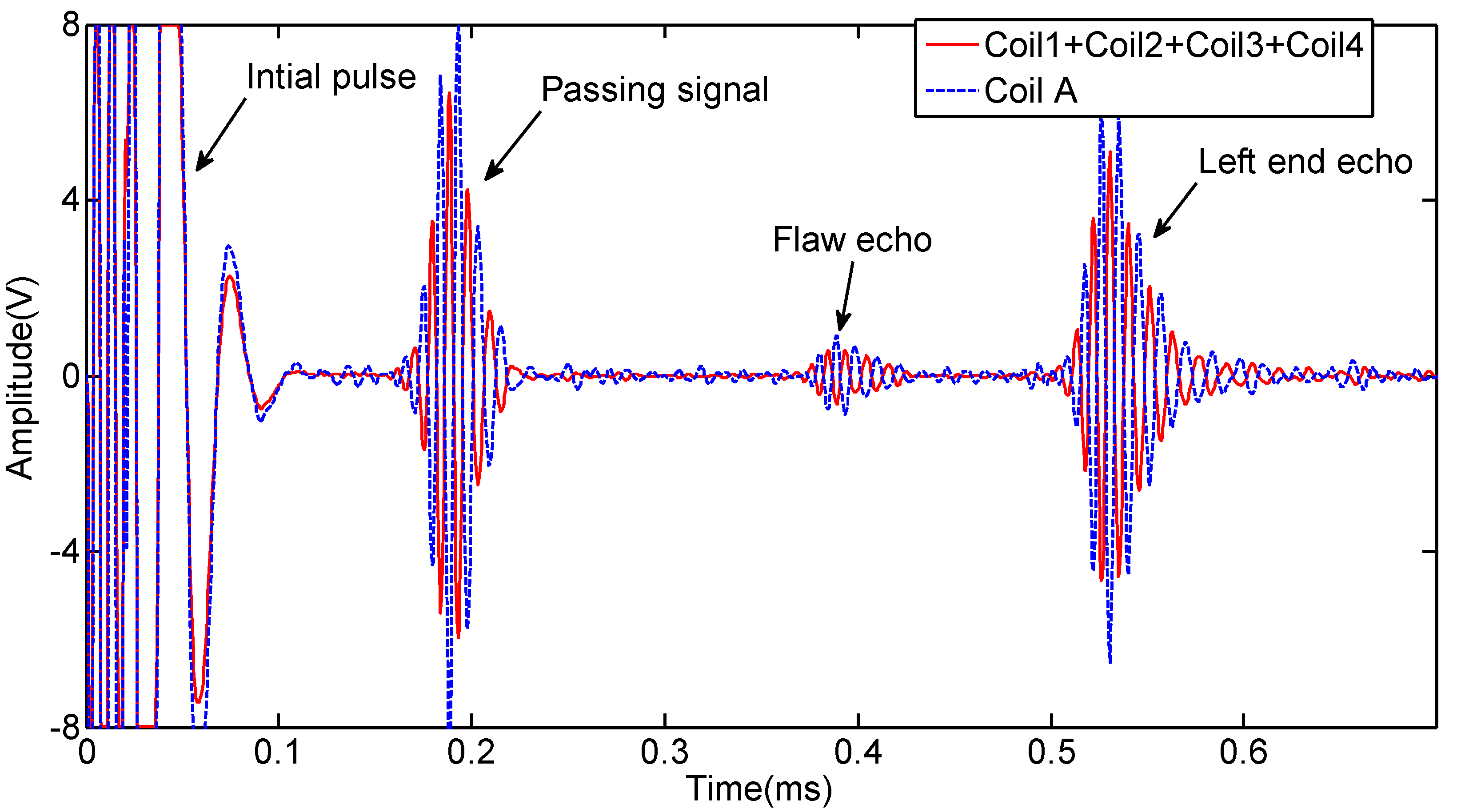
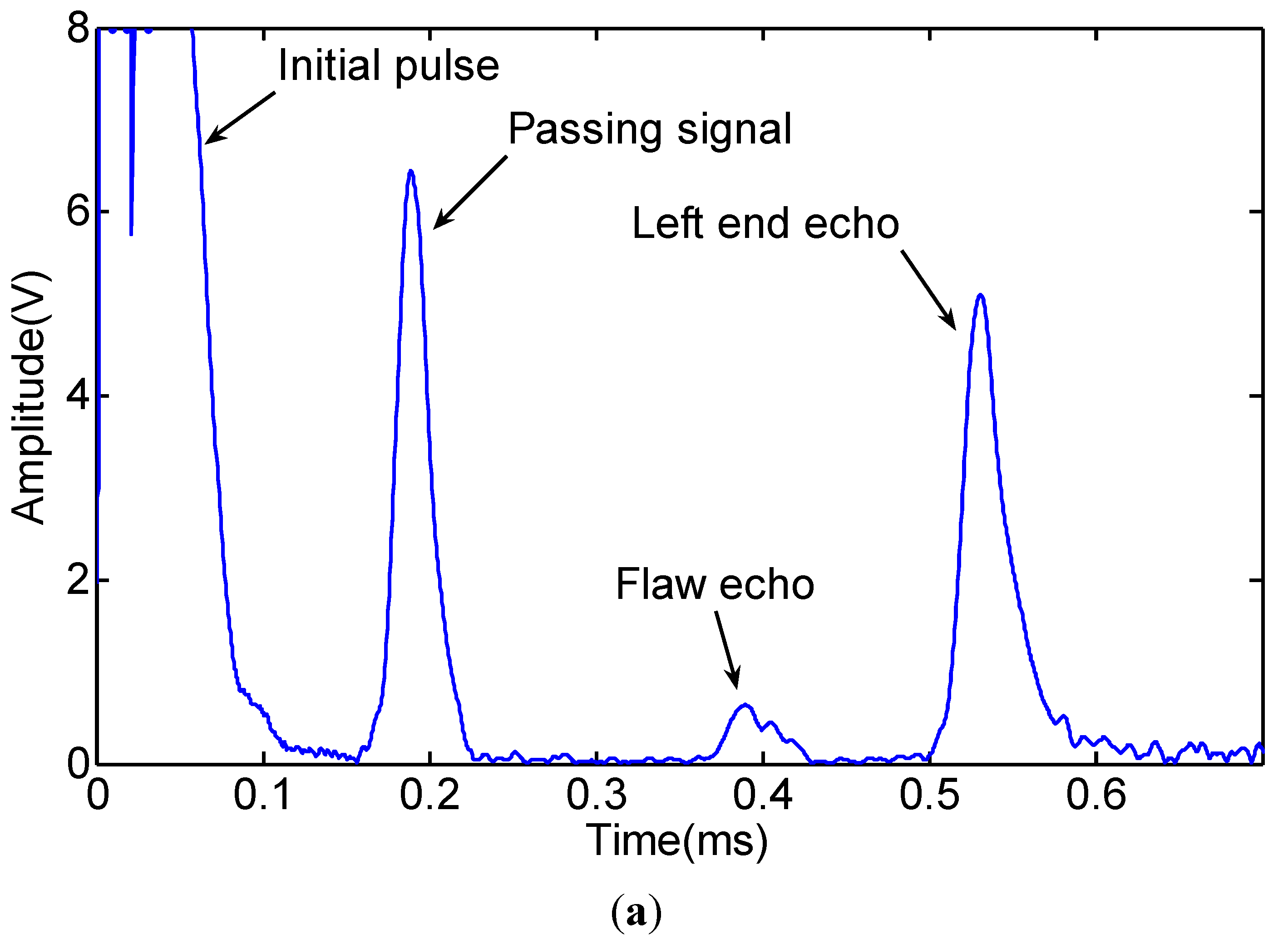
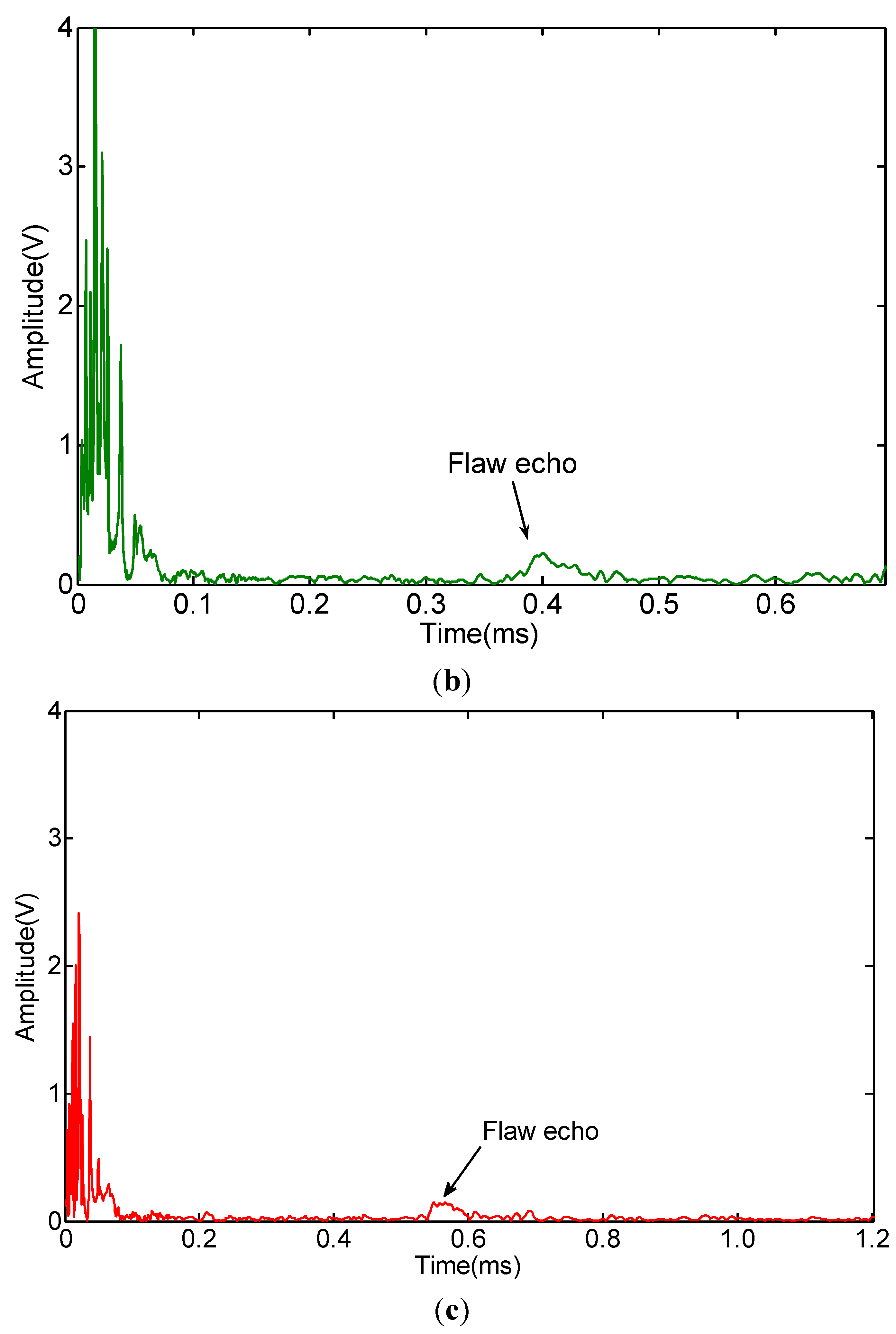
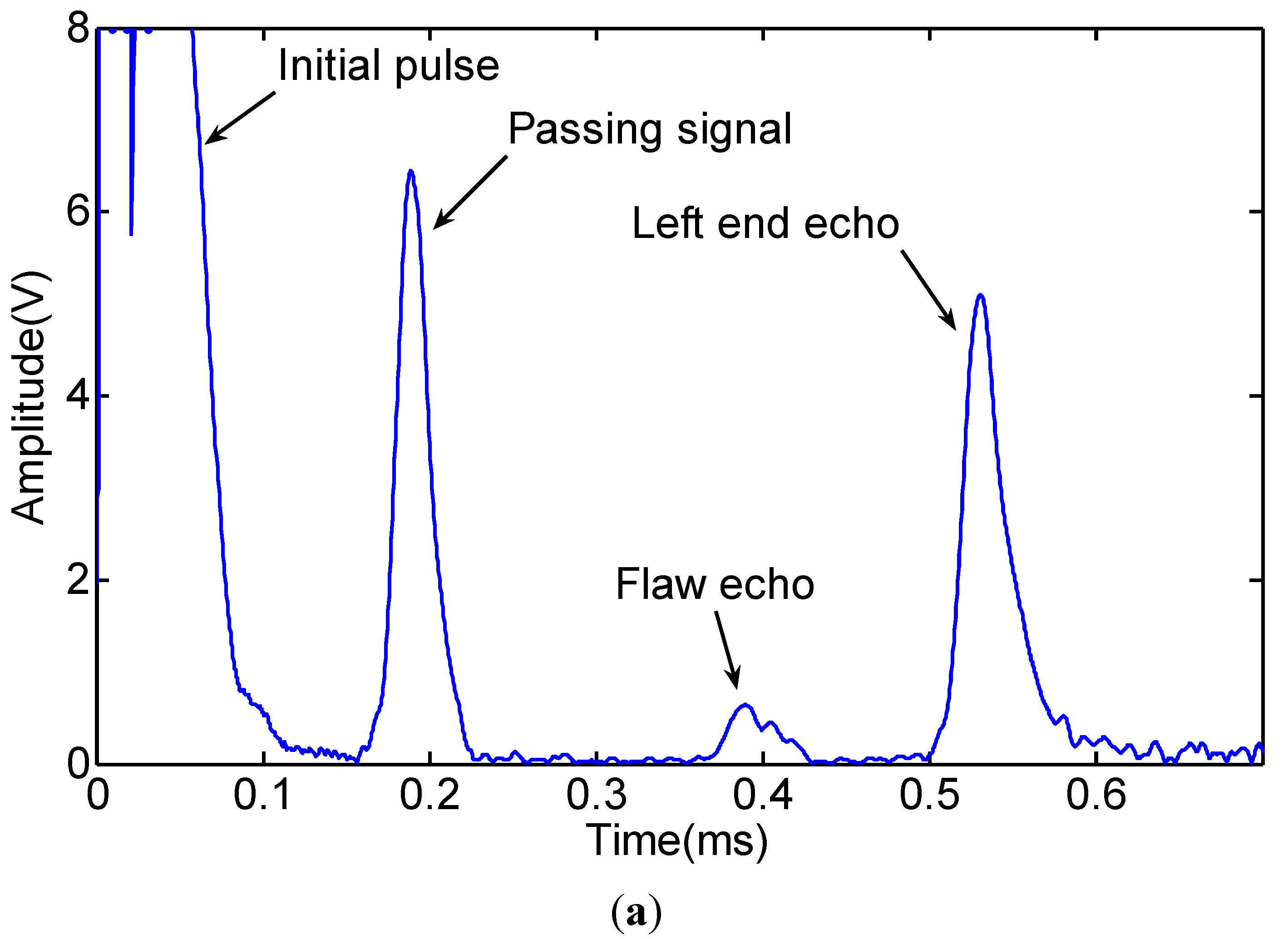
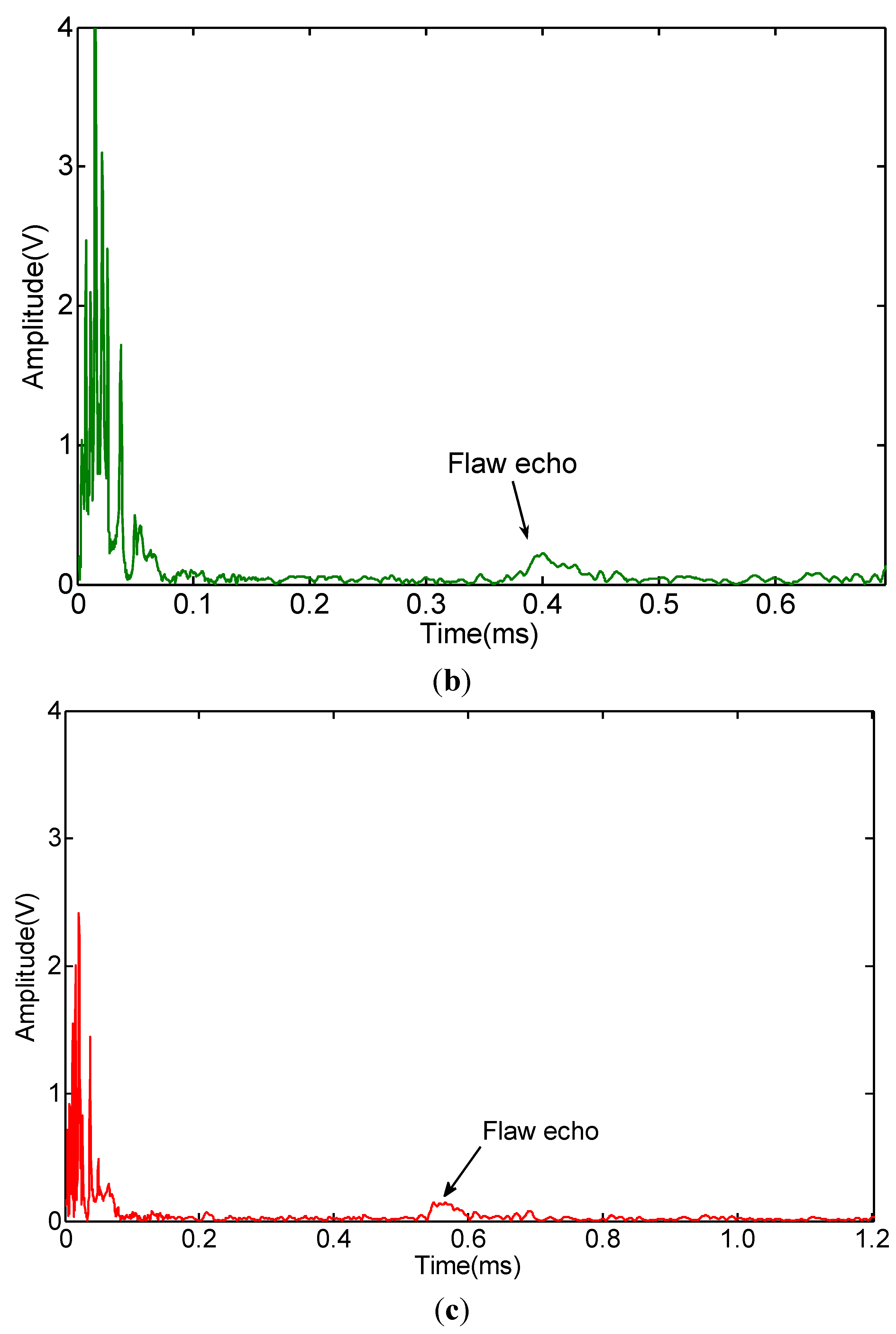
4.2. Experimental Results


5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rose, J.L. A baseline and vision of ultrasonic guided wave inspection potential. J. Press. Vessel Technol. Trans. ASME 2002, 124, 273–282. [Google Scholar] [CrossRef]
- Cawley, P.; Lowe, M.J.S.; Alleyne, D.N.; Pavlakovic, B.; Wilcox, P. Practical long range guided wave testing: Applications to pipes and rail. Mater. Eval. 2003, 61, 66–74. [Google Scholar]
- Kwun, H.; Kim, S.Y.; Light, G.M. Improving guided wave testing of pipelines with mechanical attachments. Mater. Eval. 2010, 68, 927–932. [Google Scholar]
- Liu, Z.; Zhao, J.; Wu, B.; Zhang, Y.; He, C. Configuration optimization of magnetostrictive transducers for longitudinal guided wave inspection in seven-wire steel strands. NDT E Int. 2010, 43, 484–492. [Google Scholar] [CrossRef]
- Wang, X.; Tse, P.W.; Mechefske, C.K.; Hua, M. Experimental investigation of reflection in guided wave-based inspection for the characterization of pipeline defects. NDT E Int. 2010, 43, 365–374. [Google Scholar] [CrossRef]
- Kim, H.W.; Lee, J.K.; Kim, Y.Y. Circumferential phased array of shear-horizontal wave magnetostrictive patch transducers for pipe inspection. Ultrasonics 2013, 53, 423–431. [Google Scholar] [CrossRef] [PubMed]
- Hua, J.; Mu, J.; Rose, J.L. Guided wave propagation and focusing in multi-layer pipe with viscoelastic coating and infinite soil media. Mater. Eval. 2013, 71, 369–377. [Google Scholar]
- Tse, P.W.; Wang, X. Characterization of pipeline defect in guided-waves based inspection through matching pursuit with the optimized dictionary. NDT E Int. 2013, 54, 171–182. [Google Scholar]
- Cawley, P.; Lowe, M.J.S.; Simonetti, F.; Chevalier, C.; Roosenbrand, A.G. The variation of the reflection coefficient of extensional guided waves in pipes from defects as a function of defect depth, axial extent, circumferential extent and frequency. Proc. Inst. Mech. Eng. Part C 2002, 216, 1131–1144. [Google Scholar] [CrossRef]
- Li, J.; Rose, J.L. Implementing guided wave mode control by use of a phased transducer array. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 761–768. [Google Scholar] [CrossRef] [PubMed]
- Demma, A.; Cawley, P.; Lowe, M.; Roosenbrand, A.G.; Pavlakovic, B. The reflection of guided waves from notches in pipes: A guide for interpreting corrosion measurements. NDT E Int. 2004, 37, 167–180. [Google Scholar] [CrossRef]
- Demma, A.; Cawley, P.; Lowe, M.; Pavlakovic, B. The effect of bends on the propagation of guided waves in pipes. J. Press. Vessel Technol. Trans. ASME 2005, 127, 328–335. [Google Scholar] [CrossRef]
- Long Range Guided Wave Inspection Usage—Current Commercial Capabilities and Research Directions. Available online: http://www3.imperial.ac.uk/pls/portallive/docs/1/55745699.PDF (accessed on 6 January 2015).
- Lowe, M.J.S.; Alleyne, D.N.; Cawley, P. The mode conversion of a guided wave by a part-circumferential notch in a pipe. J. Appl. Mech. Trans. ASME 1998, 65, 649–656. [Google Scholar] [CrossRef]
- Zhu, W. An fem simulation for guided elastic wave generation and reflection in hollow cylinders with corrosion defects. J. Press. Vessel Technol. Trans. ASME 2002, 124, 108–117. [Google Scholar] [CrossRef]
- Vinogradov, S. Magnetostricive Transducer for Torsional Mode Guided Wave in Pipes and Plates. Mater. Eval. 2009, 67, 333–341. [Google Scholar]
- Vinogradov, S. Development of Enhanced guided wave screening using broadband magnetostrictive transducer and non-linear signal processing. In Proceedings of the Fourth Japan-US Symposium on Emerging NDE Capabilities for a Safer World, Maui Island, HI, USA, 7–11 June 2010.
- Vinogradov, S.; Leonard, J. Development of Magnetostrictive Sensor Technology for Guided Wave Examinations of Piping and Tubing. In Proceedings of the 10th European Conference on NDT, Moscow, Russia, 7–11 June 2010.
- Vinogradov, S.; Carlos, B. Development of guided wave examinations of piping and tubing using magnetostrictive sensor technology. In Proceedings of the 8th International Conference on NDE in Relation to Structural Integrity for Nuclear and Pressurized Components, Berlin, Germany, 29 September–1 October 2010.
- Vinogradov, S. Method and System for the Generation of Torsional Guided Waves Using a Ferromagnetic Strip Sensor. U.S. Patent No. 7,573,261, 11 August 2009. [Google Scholar]
- Vinogradov, S.; Kwun, H. Magnetostrictive Sensor Having Crimped Magnetostrictive Strip for High Temperature Operation. U.S. Patent Application 13/792,090, 10 March 2013. [Google Scholar]
- Xu, J.; Kong, D.Y.; Wu, X.J.; Cong, M. Effect of the magnetic field in the air zone for receiving guided waves based on magnetomechanical effect. In Proceedings of the 16th International Symposium on Applied Electromagnetics and Mechanics, QC, Canada, 31 July–1 August 2013.
- IEEE. IEEE Standard on Magnetostrictive Materials: Piezomagnetic Nomenclature STD 319–1990; IEEE Std: New York, NY, USA, 1991; p. 9. [Google Scholar]
- Pavlakovic, B.; Lowe, M.; Alleyne, D.; Cawley, P. Disperse: A general purpose program for creating dispersion curves. In Review of Progress in Quantitative Nondestructive Evaluation; Thompson, D., Chimenti, D., Eds.; Springer: New York, NY, USA, 1997; Volume16. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Wu, X.; Kong, D.; Sun, P. A Guided Wave Sensor Based on the Inverse Magnetostrictive Effect for Distinguishing Symmetric from Asymmetric Features in Pipes. Sensors 2015, 15, 5151-5162. https://doi.org/10.3390/s150305151
Xu J, Wu X, Kong D, Sun P. A Guided Wave Sensor Based on the Inverse Magnetostrictive Effect for Distinguishing Symmetric from Asymmetric Features in Pipes. Sensors. 2015; 15(3):5151-5162. https://doi.org/10.3390/s150305151
Chicago/Turabian StyleXu, Jiang, Xinjun Wu, Dongying Kong, and Pengfei Sun. 2015. "A Guided Wave Sensor Based on the Inverse Magnetostrictive Effect for Distinguishing Symmetric from Asymmetric Features in Pipes" Sensors 15, no. 3: 5151-5162. https://doi.org/10.3390/s150305151
APA StyleXu, J., Wu, X., Kong, D., & Sun, P. (2015). A Guided Wave Sensor Based on the Inverse Magnetostrictive Effect for Distinguishing Symmetric from Asymmetric Features in Pipes. Sensors, 15(3), 5151-5162. https://doi.org/10.3390/s150305151