
Optimisation in the Design of Environmental Sensor Networks with Robustness Consideration


Abstract
:1. Introduction
1.1. Environmental Sensor Networks
1.2. ESN Design and Its Challenges
1.3. Our Work
2. Experimental Approach
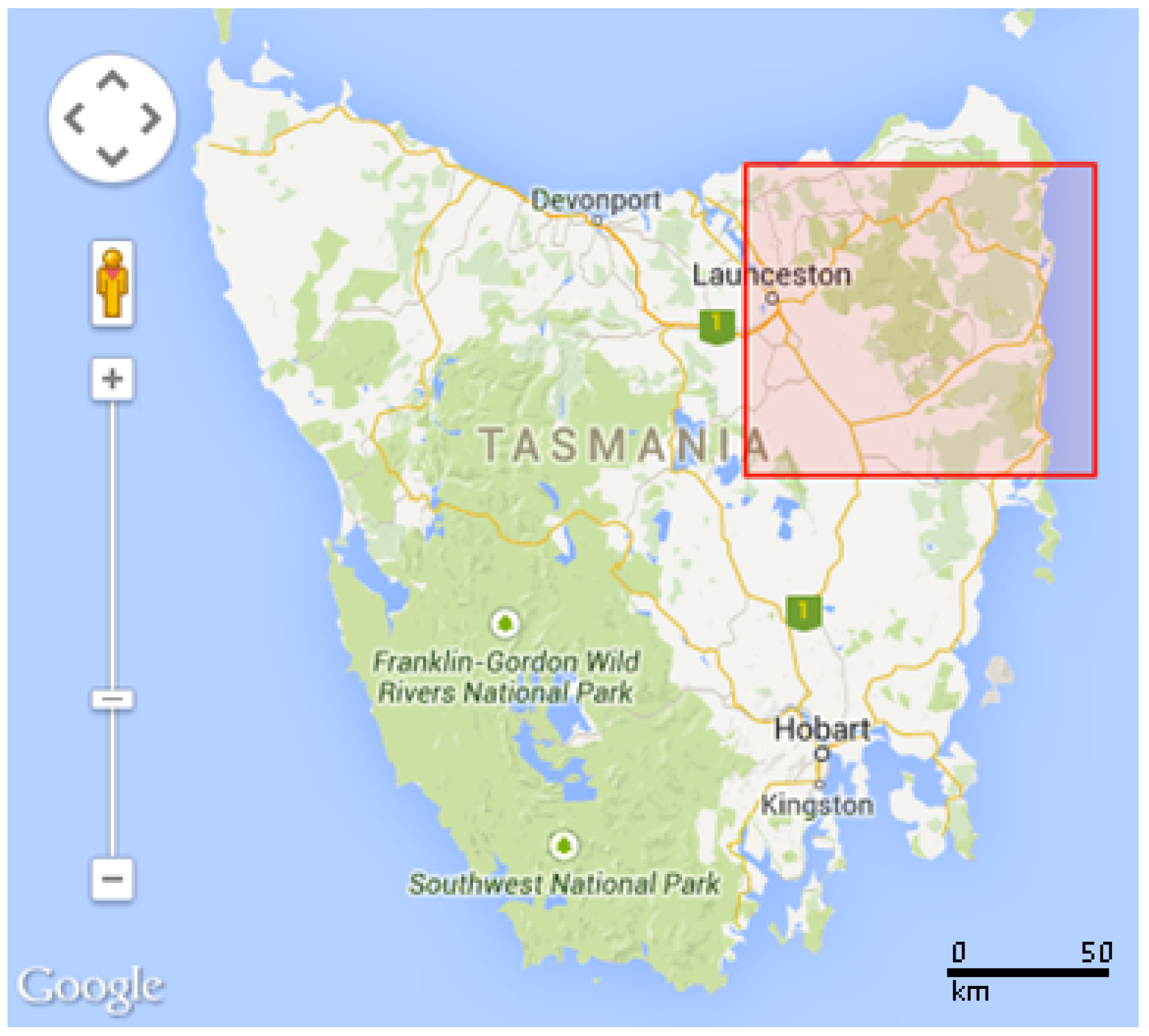
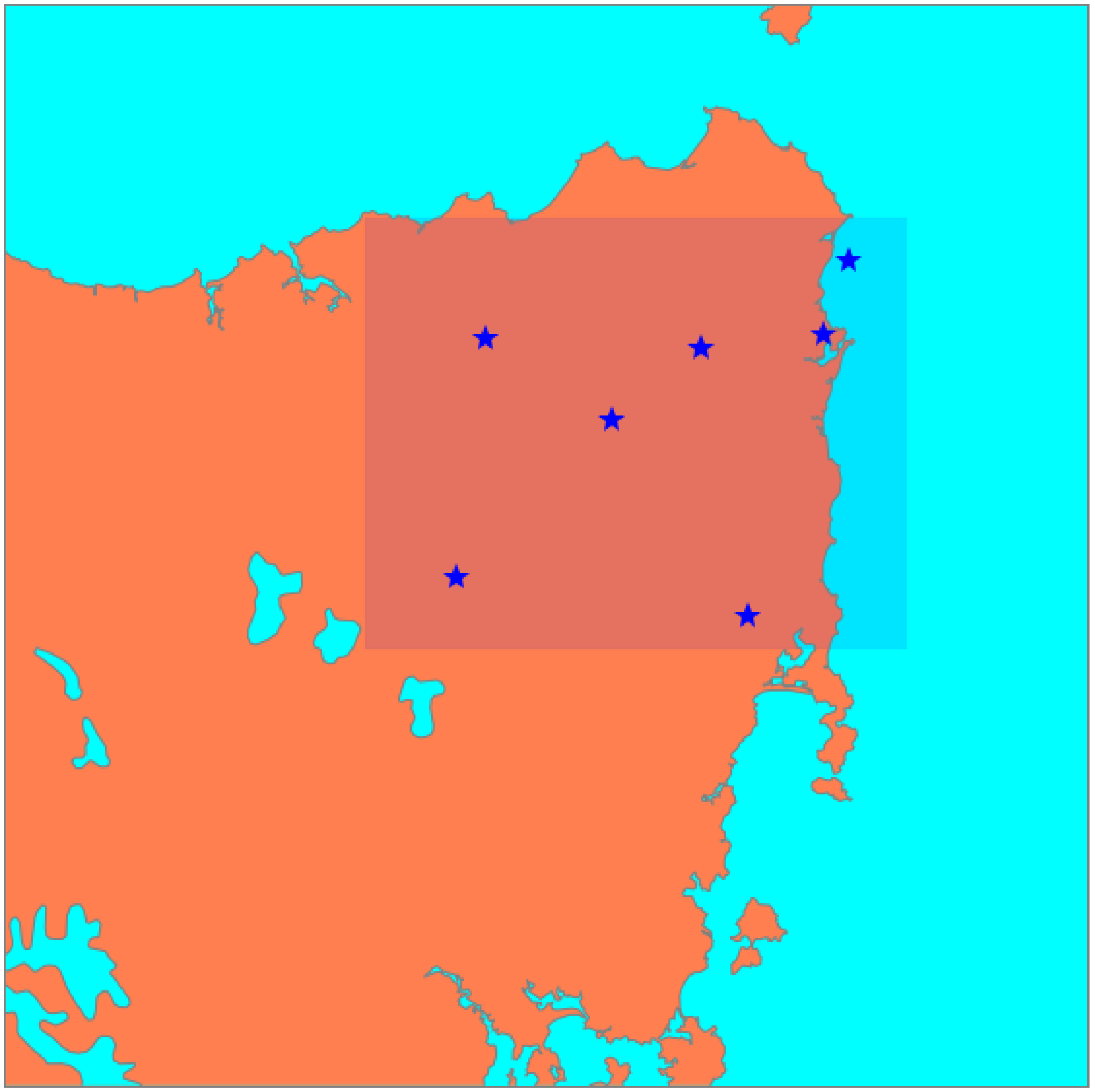
2.1. Dataset
2.2. ESN Design Optimisation
2.2.1. Representativeness in ESN Design
- (1)
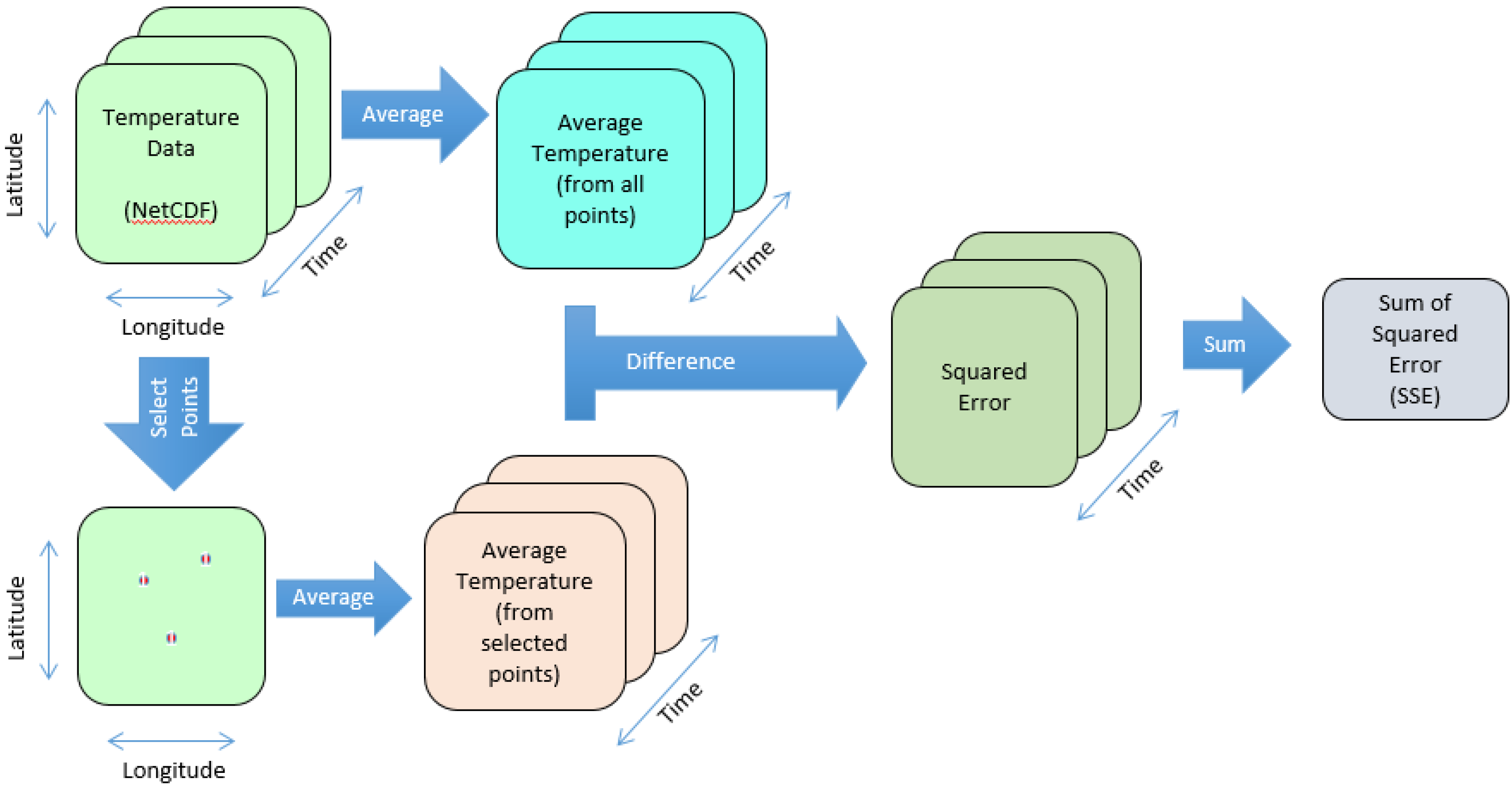
- The average spatial temperature is calculated from all points across the two spatial dimensions for each time step.
- (2)
- Certain points are selected from the spatial dimensions to place the sensor nodes.
- (3)
- The average spatial temperature is calculated from the temperature data measured by the available sensor nodes for each time step.
- (4)
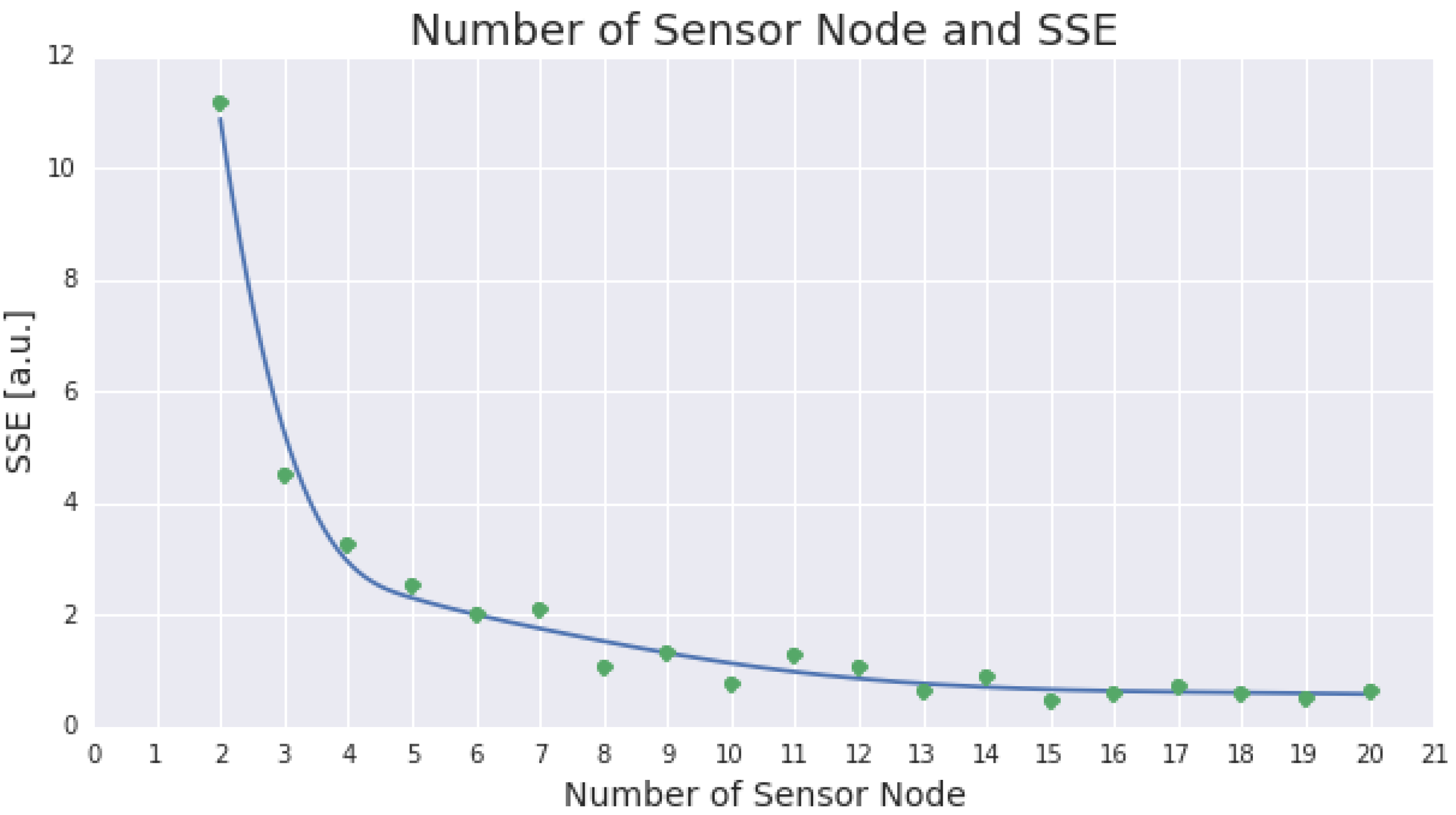
- The difference between these two average spatial temperatures is calculated for each time step and the Sum Squared Error (SSE) is produced as the result.
| t | is the time index |
| i | is the latitude index |
| j | is the longitude index |
| is the length of the second dimension (latitude) | |
| is the length of the third dimension (longitude) | |
| is the temperature data at time, latitude, and longitude index of respectively | |
| is the average spatial temperature at time index t |
| is the location of a particular sensor node which is represented as a tuple of latitude and longitude | |
| z | is the number of sensor nodes included in the ESN design |
| is the ESN design which is defined as a vector of sensor nodes |
| is a vector of temperature data measured by all sensor nodes at time index t | |
| is the average spatial temperature measured by all sensor nodes at time index t | |
| z | is the number of sensor nodes included in the ESN design |
| is the length of the first dimension (time) | |
| is the sum squared error of the average spatial temperature |
2.2.2. Optimisation Problem in ESN Design

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of generation | 1000 |
| Population size | 50 |
| Crossover probability | 0.6 |
| Mutation probability | 0.001 |
| Selection operation | NSGA2 [51] |
| Crossover operation | one-point crossover |
| Mutation operation | uniform integer mutation |
| Seed number | 0 |
2.3. ESN Data Quality Component
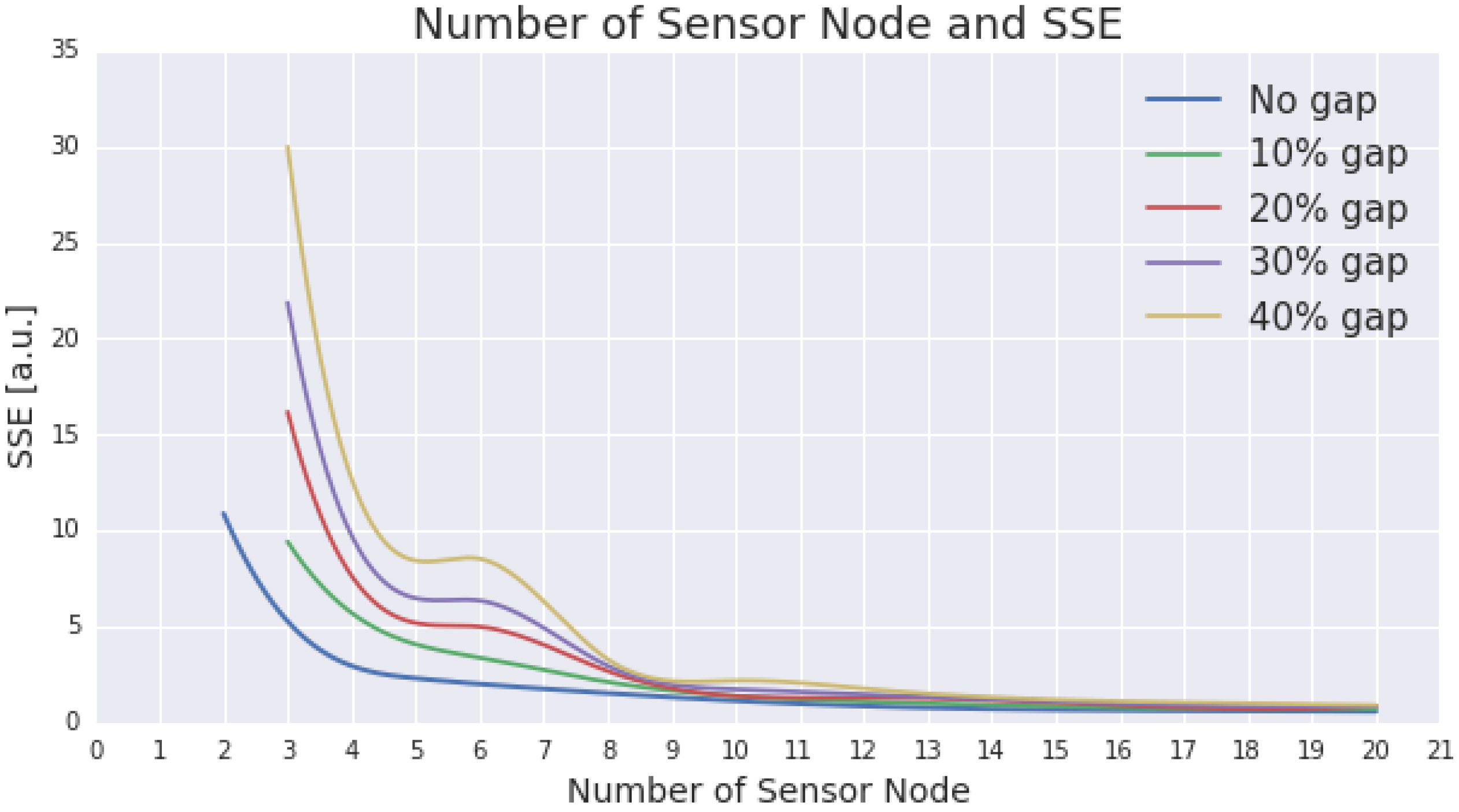
2.3.1. Gap Simulation
| is a function to select randomly a time index and a sensor node | |
| p | is the total number of gaps |
| is the vector of gaps |
2.3.2. Gap Filling
| is the SRT predicted value | |
| n | is the number of neighbouring sensor nodes |
| is the linear regression predicted value from neighbour sensor node i | |
| is the linear regression error from neighbour sensor node i |
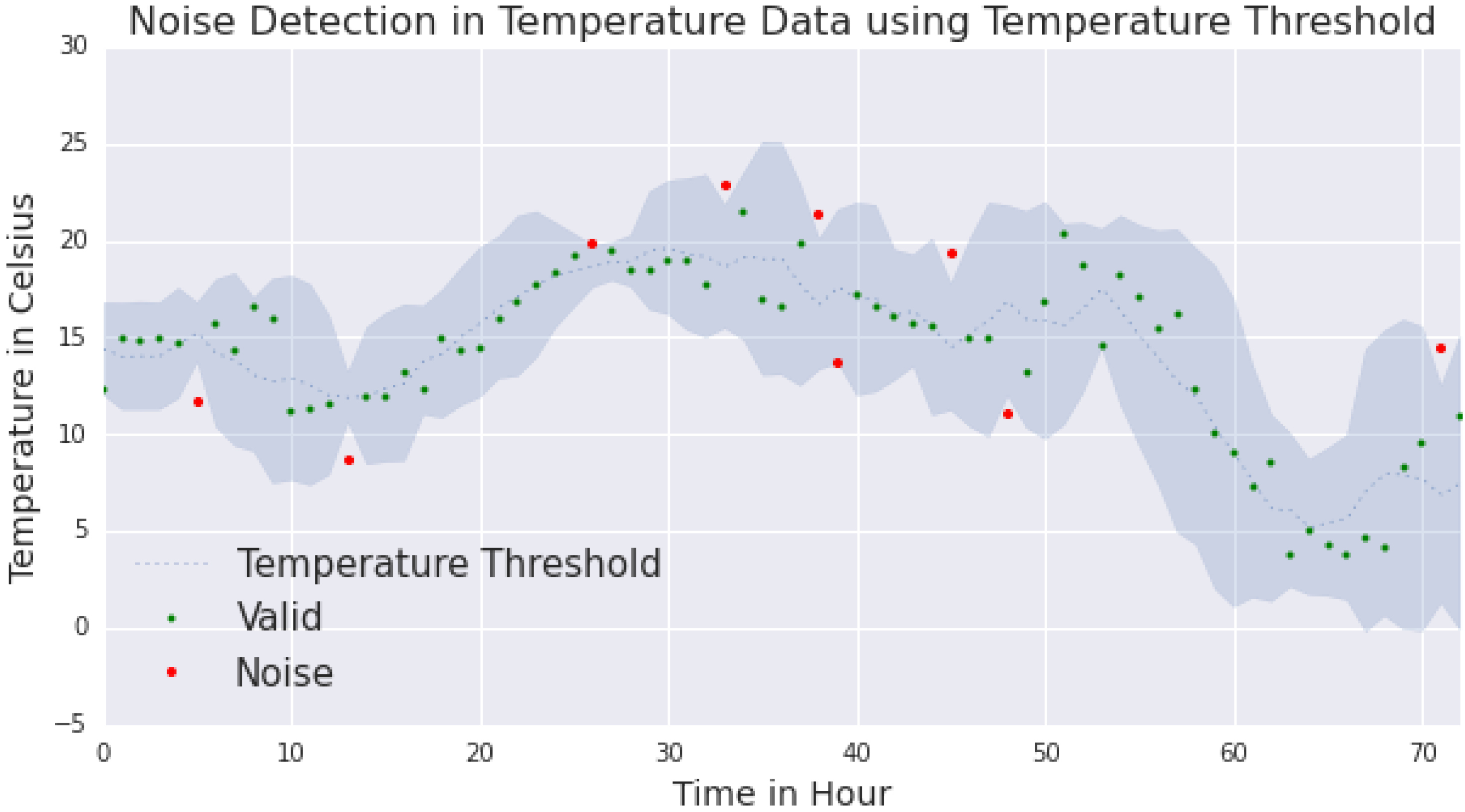
2.3.3. Noise Simulation
| is a function to select randomly a time index and a sensor node | |
| q | is the total number of noises |
| is the vector of noises |
2.3.4. Noise Detection
| is the average temperature data within the window period | |
| is a constant value. | |
| is the standard deviation of the temperature data within the window period |
3. Results and Discussion
3.1. Optimum ESN Design
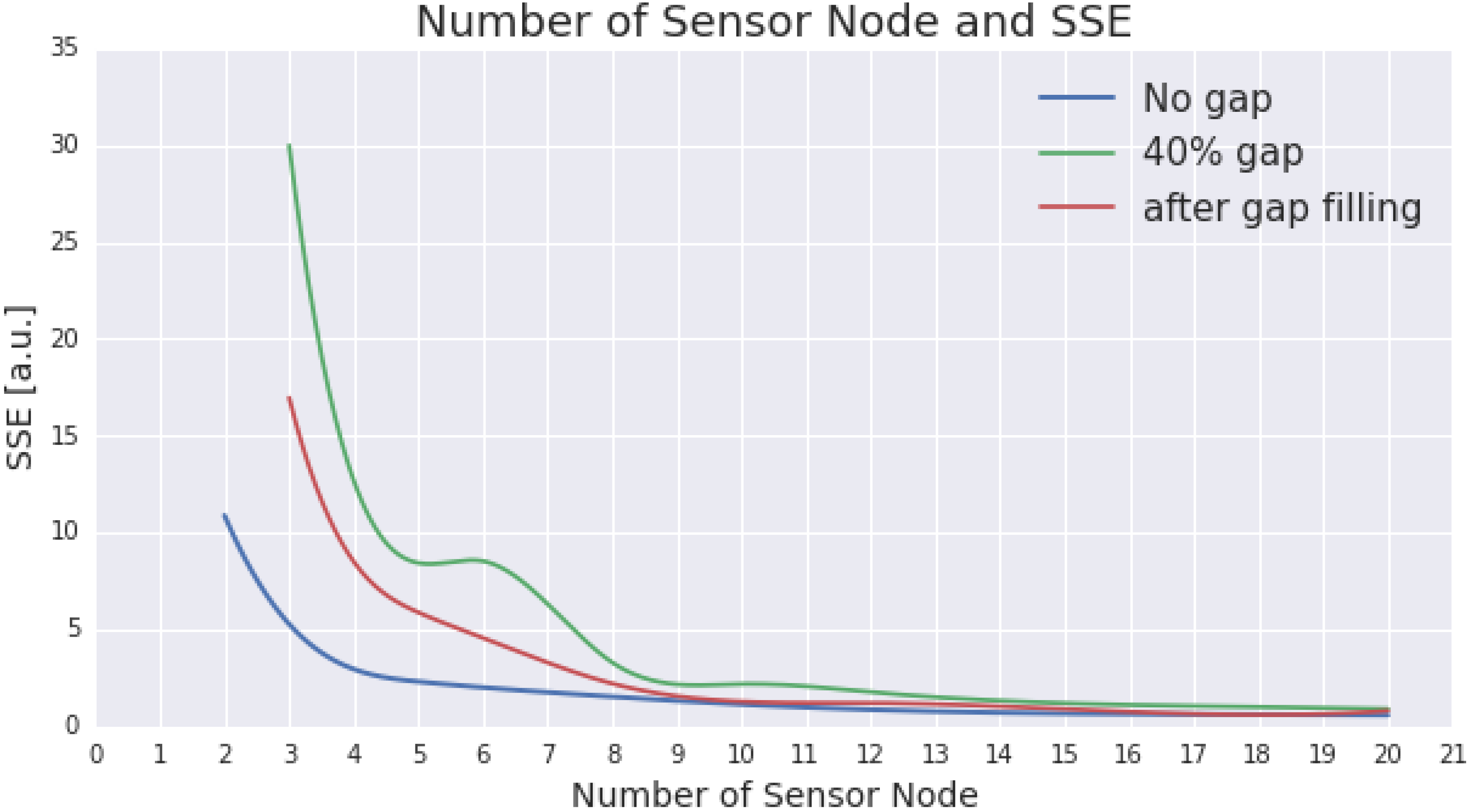
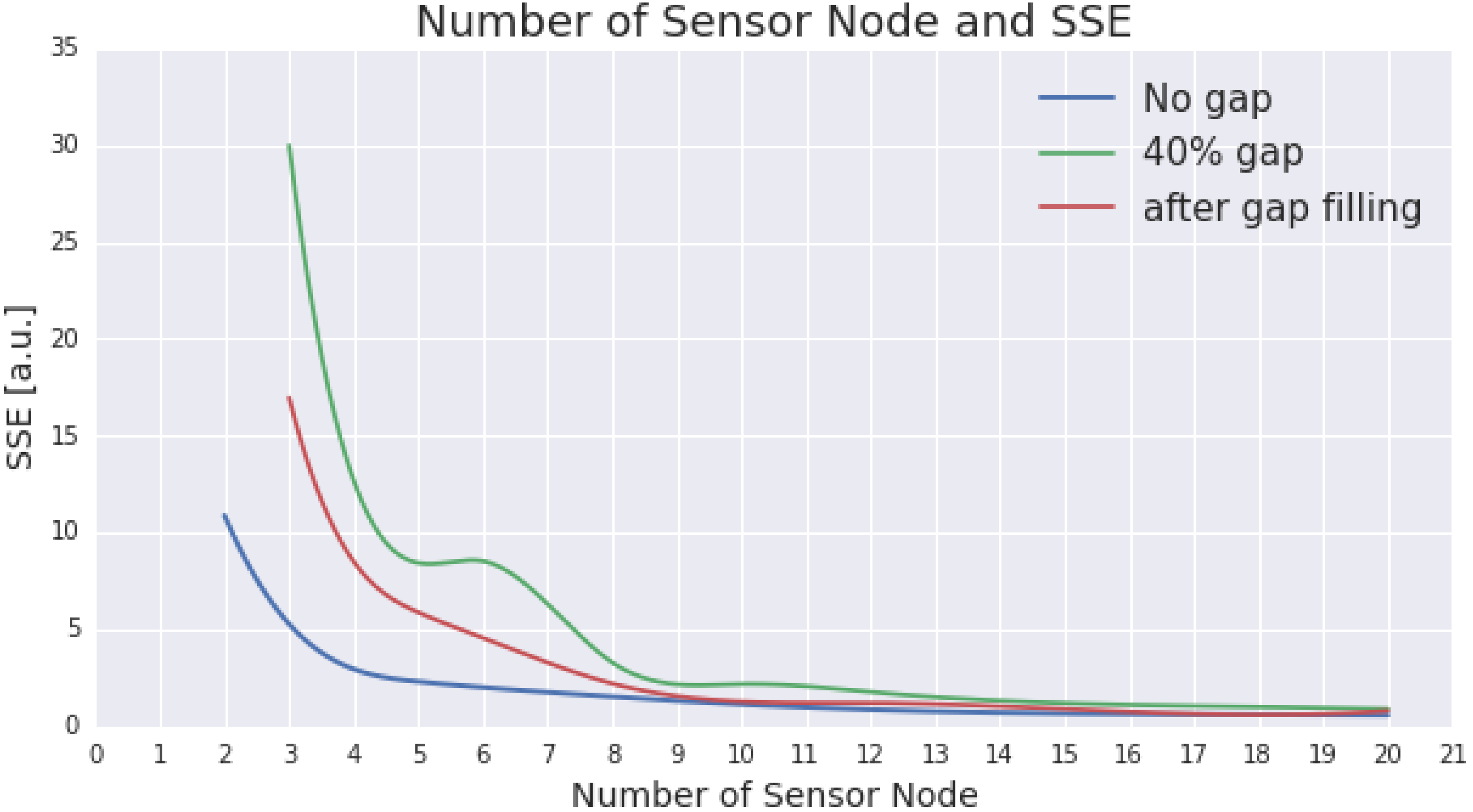
3.2. Impact of Data Gaps on ESN Design
3.3. Gap Filling Result
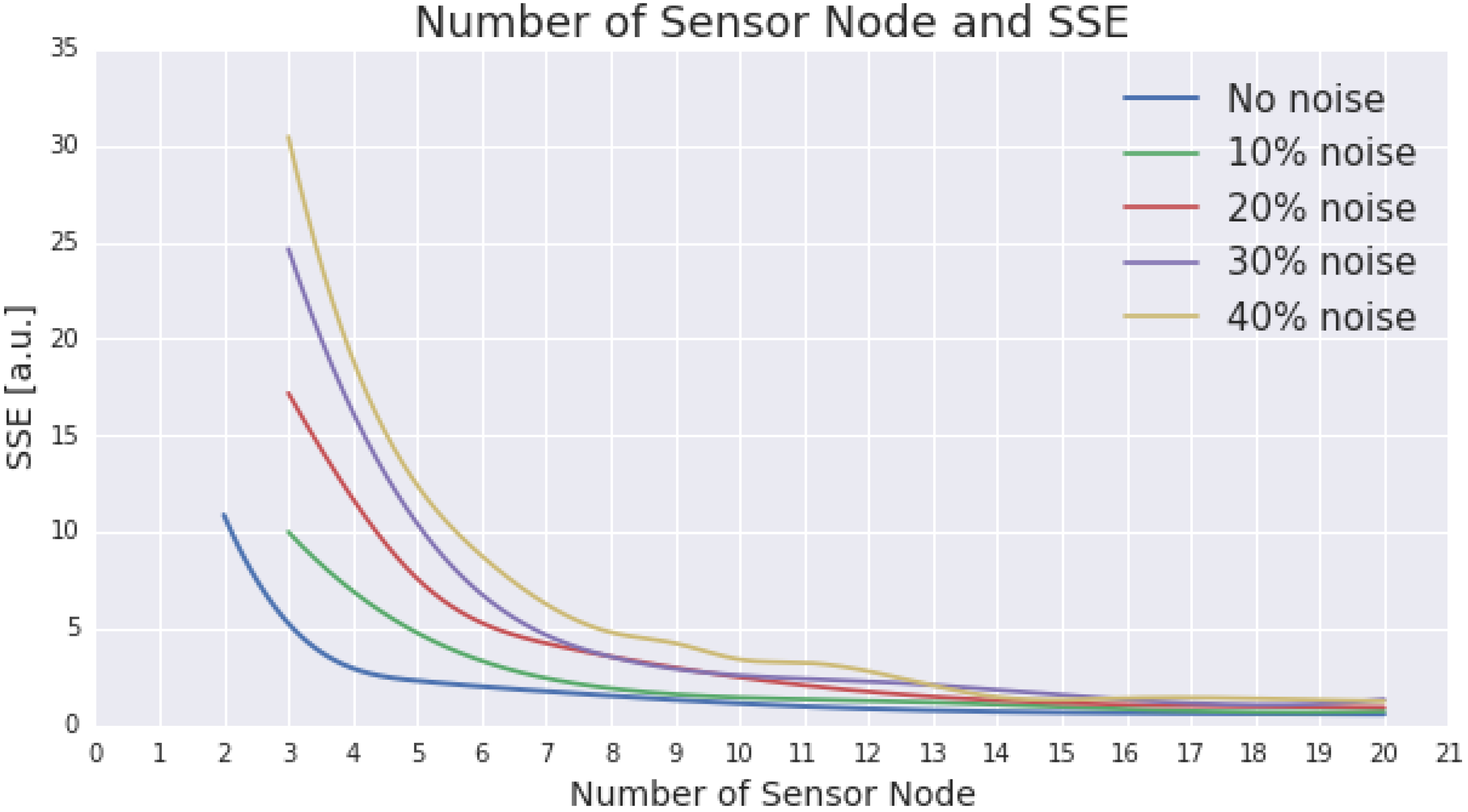
3.4. Impact of Noises on ESN Design
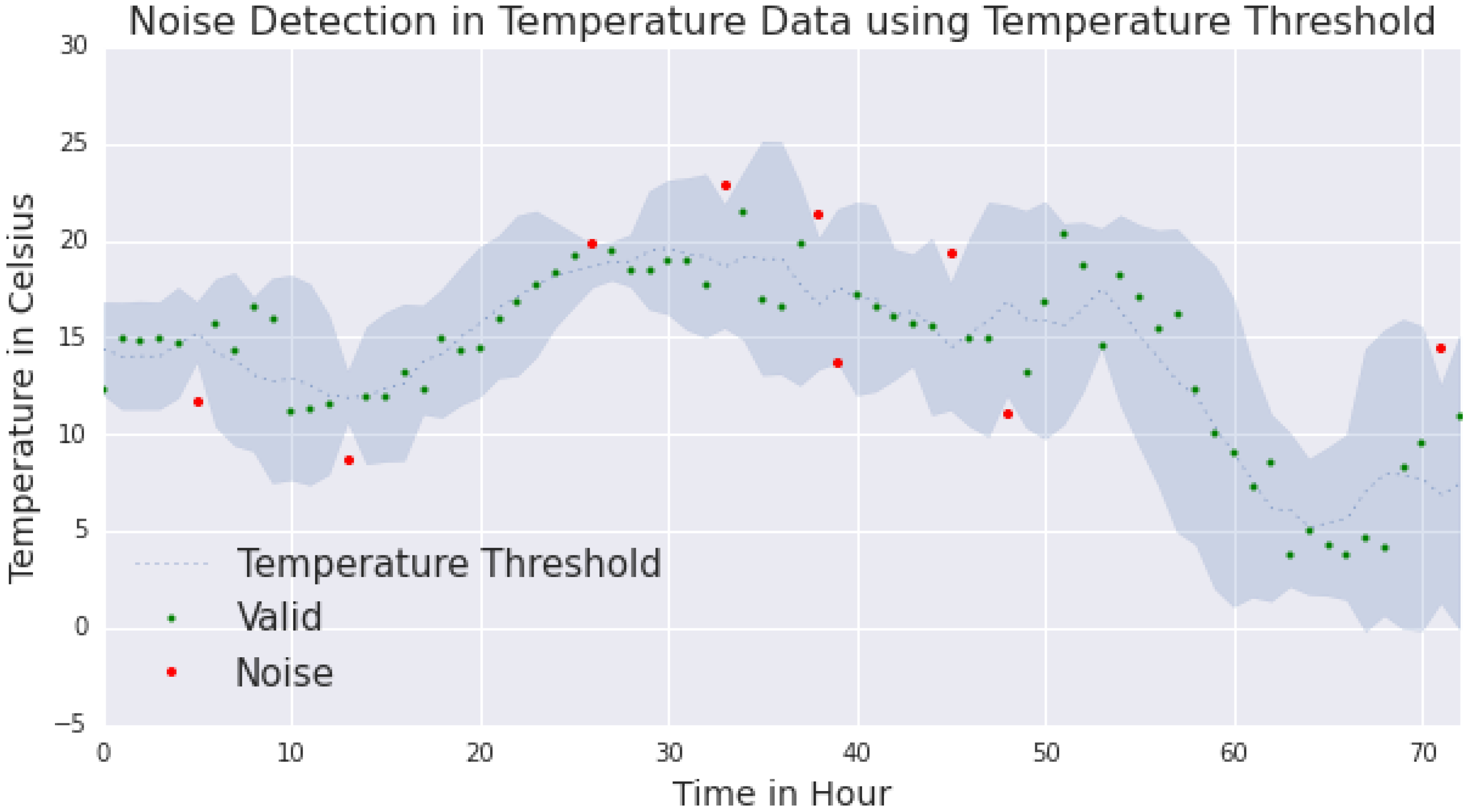
3.5. Noise Detection Results
3.6. Suggestion from the Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CSIRO | Commonwealth Scientific and Industrial Research Organisation |
| DEAP | Distributed Evolutionary Algorithms in Python |
| EA | Evolutionary Algorithm |
| ESN | Environmental Sensor Networks |
| GA | Genetic Algorithm |
| netCDF | Network Common Data Form |
| NP-hard | Non-deterministic Polynomial-time hard |
| NSGA2 | Non Sorting Genetic Algorithm 2 |
| RoI | Region of Interest |
| SRT | Spatial Regression Test |
| SSE | Sum Squared Error |
References
- Chong, C.Y.; Kumar, S. Sensor networks: Evolution, opportunities, and challenges. IEEE Proc. 2003, 91, 1247–1256. [Google Scholar] [CrossRef]
- Hart, J.K.; Martinez, K. Environmental Sensor Networks: A revolution in the earth system science? Earth-Sci. Rev. 2006, 78, 177–191. [Google Scholar] [CrossRef]
- Martinez, K.; Hart, J.; Ong, R. Environmental sensor networks. Computer 2004, 37, 50–56. [Google Scholar] [CrossRef]
- Porter, J.H.; Nagy, E.; Kratz, T.K.; Hanson, P.; Collins, S.L.; Arzberger, P. New Eyes on the World: Advanced Sensors for Ecology. BioScience 2009, 59, 385–397. [Google Scholar] [CrossRef]
- Pierce, F.J.; Elliott, T.V. Regional and on-farm wireless sensor networks for agricultural systems in Eastern Washington. Comput. Electron. Agric. 2008, 61, 32–43. [Google Scholar] [CrossRef]
- Heinz, E.; Kraft, P.; Buchen, C.; Frede, H.G.; Aquino, E.; Breuer, L. Set Up of an Automatic Water Quality Sampling System in Irrigation Agriculture. Sensors 2013, 14, 212–228. [Google Scholar] [CrossRef] [PubMed]
- Pajares, G.; Peruzzi, A.; Gonzalez-de Santos, P. Sensors in Agriculture and Forestry. Sensors 2013, 13, 12132–12139. [Google Scholar] [CrossRef] [PubMed]
- Bitella, G.; Rossi, R.; Bochicchio, R.; Perniola, M.; Amato, M. A Novel Low-Cost Open-Hardware Platform for Monitoring Soil Water Content and Multiple Soil-Air-Vegetation Parameters. Sensors 2014, 14, 19639–19659. [Google Scholar] [CrossRef] [PubMed]
- Lloret, J.; Garcia, M.; Bri, D.; Sendra, S. A Wireless Sensor Network Deployment for Rural and Forest Fire Detection and Verification. Sensors 2009, 9, 8722–8747. [Google Scholar] [CrossRef] [PubMed]
- Tsiourlis, G.; Andreadakis, S.; Konstantinidis, P. SITHON: A Wireless Network of in Situ Optical Cameras Applied to the Early Detection-Notification-Monitoring of Forest Fires. Sensors 2009, 9, 4465–4482. [Google Scholar] [PubMed]
- Martinez-de Dios, J.R.; Merino, L.; Caballero, F.; Ollero, A. Automatic Forest-Fire Measuring Using Ground Stations and Unmanned Aerial Systems. Sensors 2011, 11, 6328–6353. [Google Scholar] [CrossRef] [PubMed]
- Storey, M.V.; van der Gaag, B.; Burns, B.P. Advances in on-line drinking water quality monitoring and early warning systems. Water Res. 2011, 45, 741–747. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.; Myung, H. Sensor Node for Remote Monitoring of Waterborne Disease-Causing Bacteria. Sensors 2015, 15, 10569–10579. [Google Scholar] [CrossRef] [PubMed]
- Dong, J.; Wang, G.; Yan, H.; Xu, J.; Zhang, X. A survey of smart water quality monitoring system. Environ. Sci. Pollut. Res. 2015, 22, 4893–4906. [Google Scholar] [CrossRef] [PubMed]
- Shi, W.; Wong, M.S.; Wang, J.; Zhao, Y. Analysis of Airborne Particulate Matter (PM2.5) over Hong Kong Using Remote Sensing and GIS. Sensors 2012, 12, 6825–6836. [Google Scholar] [CrossRef] [PubMed]
- Malaver, A.; Motta, N.; Corke, P.; Gonzalez, F. Development and Integration of a Solar Powered Unmanned Aerial Vehicle and a Wireless Sensor Network to Monitor Greenhouse Gases. Sensors 2015, 15, 4072–4096. [Google Scholar] [CrossRef] [PubMed]
- Elen, B.; Peters, J.; Poppel, M.V.; Bleux, N.; Theunis, J.; Reggente, M.; Standaert, A. The Aeroflex: A Bicycle for Mobile Air Quality Measurements. Sensors 2012, 13, 221–240. [Google Scholar] [CrossRef] [PubMed]
- Isaak, D.J.; Wollrab, S.; Horan, D.; Chandler, G. Climate change effects on stream and river temperatures across the northwest U.S. from 1980–2009 and implications for salmonid fishes. Clim. Chang. 2011, 113, 499–524. [Google Scholar] [CrossRef]
- Ganguly, A.; Steinhaeuser, K. Data Mining for Climate Change and Impacts. In Proceedings of the IEEE International Conference on Data Mining Workshops, ICDMW, Pisa, Italy, 15–19 Decmber 2008; pp. 385–394.
- Onur, E.; Ersoy, C.; Delic, H. How many sensors for an acceptable breach detection probability? Comput. Commun. 2006, 29, 173–182. [Google Scholar] [CrossRef]
- D’Este, C.; Souza, P.D.; Sharman, C.; Allen, S. Relocatable, Automated Cost-Benefit Analysis for Marine Sensor Network Design. Sensors 2012, 12, 2874–2898. [Google Scholar] [CrossRef] [PubMed]
- Fan, G.; Wang, R.; Huang, H.; Sun, L.; Sha, C. Coverage-Guaranteed Sensor Node Deployment Strategies for Wireless Sensor Networks. Sensors 2010, 10, 2064–2087. [Google Scholar] [CrossRef] [PubMed]
- McGrath, M.J.; Scanaill, C.N. Sensor Technologies: Healthcare, Wellness and Environmental Applications, 1st ed.; Apress: Berkeley, CA, USA, 2013. [Google Scholar]
- Younis, M.; Akkaya, K. Strategies and techniques for node placement in wireless sensor networks: A survey. Ad Hoc Netw. 2008, 6, 621–655. [Google Scholar] [CrossRef]
- Younis, M.; Akkaya, K. Node Positioning for Increased Dependability of Wireless Sensor Networks. In Algorithms and Protocols for Wireless Sensor Networks; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2008; pp. 225–266. [Google Scholar]
- Cheng, Z.; Perillo, M.; Heinzelman, W. General Network Lifetime and Cost Models for Evaluating Sensor Network Deployment Strategies. IEEE Trans. Mob. Comput. 2008, 7, 484–497. [Google Scholar] [CrossRef]
- Gribaudo, M.; Cerotti, D.; Bobbio, A. Analysis of On-off policies in Sensor Networks Using Interacting Markovian Agents. In Proceedings of the Annual IEEE International Conference on Pervasive Computing and Communications, Hong Kong, China, 17–21 March 2008; pp. 300–305.
- Bhondekar, A.P.; Vig, R.; Singla, M.L.; Ghanshyam, C.; Kapur, P. Genetic Algorithm Based Node Placement Methodology For Wireless Sensor Networks. In Proceedings of the International MultiConference of Engineers and Computer Scientists, Hong Kong, China, 18–20 March 2009.
- Aziz, N.; Mohemmed, A.; Alias, M. A wireless sensor network coverage optimization algorithm based on particle swarm optimization and Voronoi diagram. In Proceedings of the International Conference on Networking, Sensing and Control, ICNSC’09, Okayama, Japan, 26–29 March 2009; pp. 602–607.
- Beccuti, M.; Codetta-Raiteri, D.; Franceschinis, G. Multiple Abstraction Levels in Performance Analysis of WSN Monitoring Systems. In Proceedings of the Fourth International ICST Conference on Performance Evaluation Methodologies and Tools; ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering), Brussels, Belgium, 20–22 October 2009; pp. 1–10.
- Akbarzadeh, V.; Ko, A.H.R.; Gagne, C.; Parizeau, M. Topography-Aware Sensor Deployment Optimization with CMA-ES. In Parallel Problem Solving from Nature, PPSN XI; Schaefer, R., Cotta, C., Kolodziej, J., Rudolph, G., Eds.; Springer Berlin Heidelberg: Berlin, Germany, 2010; pp. 141–150. [Google Scholar]
- Senel, F.; Younis, M.; Akkaya, K. Bio-Inspired Relay Node Placement Heuristics for Repairing Damaged Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2011, 60, 1835–1848. [Google Scholar] [CrossRef]
- Kulkarni, R.; Venayagamoorthy, G. Particle Swarm Optimization in Wireless-Sensor Networks: A Brief Survey. IEEE Trans. Syst. Man Cybern. Part C: Appl. Rev. 2011, 41, 262–267. [Google Scholar]
- Unaldi, N.; Temel, S.; Asari, V.K. Method for Optimal Sensor Deployment on 3D Terrains Utilizing a Steady State Genetic Algorithm with a Guided Walk Mutation Operator based on the Wavelet Transform. Sensors 2012, 12, 5116–5133. [Google Scholar] [CrossRef] [PubMed]
- Mamun, Q. A Qualitative Comparison of Different Logical Topologies for Wireless Sensor Networks. Sensors 2012, 12, 14887–14913. [Google Scholar] [PubMed]
- Timms, G.; McCulloch, J.; McCarthy, P.; Howell, B.; de Souza, P.; Dunbabin, M.; Hartmann, K. The Tasmanian Marine Analysis Network (TasMAN). In Proceedings of the OCEANS 2009—EUROPE, Bremen, Germany, 11–14 May 2009; pp. 1–6.
- Hugo, D.; Howell, B.; D’Este, C.; Timms, G.; Sharman, C.; de Souza, P.; Allen, S. Low-cost marine monitoring: From sensors to information delivery. In Proceedings of the OCEANS, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–7.
- Rodger, J.A. Toward reducing failure risk in an integrated vehicle health maintenance system: A fuzzy multi-sensor data fusion Kalman filter approach for IVHMS. Expert Syst. Appl. 2012, 39, 9821–9836. [Google Scholar] [CrossRef]
- Mansouri, M.; Nounou, H.; Nounou, M. Genetic Algorithm-based Adaptive Optimization for Target Tracking in Wireless Sensor Networks. J. Signal Process. Syst. 2013, 74, 189–202. [Google Scholar]
- Banimelhem, O.; Mowafi, M.; Taqieddin, E.; Awad, F.; Al Rawabdeh, M. An efficient clustering approach using genetic algorithm and node mobility in wireless sensor networks. In Proceedings of the 2014 11th International Symposium on Wireless Communications Systems (ISWCS), Barcelona, Spain, 26–29 August 2014; pp. 858–862.
- Ayinde, B.; Barnawi, A. Differential evolution based deployment of wireless sensor networks. In Proceedings of the 2014 IEEE/ACS 11th International Conference on Computer Systems and Applications (AICCSA), Doha, Qatar, 10–13 November 2014; pp. 131–137.
- Cerotti, D.; Gribaudo, M.; Bobbio, A. Markovian agents models for wireless sensor networks deployed in environmental protection. Reliab. Eng. Syst. Saf. 2014, 130, 149–158. [Google Scholar] [CrossRef]
- Rodger, J.; George, J. Environmental Energy Strategy: An Induced Linguistic Ordered Weighted Averaging Approach to a Sustainable Economy. Int. J. Soc. Sustain. Econ. Soc. Cult. Context 2015, 10, 1–18. [Google Scholar]
- Lanza-Gutierrez, J.M.; Gomez-Pulido, J.A. Assuming multiobjective metaheuristics to solve a three-objective optimisation problem for Relay Node deployment in Wireless Sensor Networks. Appl. Soft Comput. 2015, 30, 675–687. [Google Scholar] [CrossRef]
- Rebai, M.; Le berre, M.; Snoussi, H.; Hnaien, F.; Khoukhi, L. Sensor deployment optimization methods to achieve both coverage and connectivity in wireless sensor networks. Comput. Oper. Res. 2015, 59, 11–21. [Google Scholar] [CrossRef]
- GRWS100: General Research-Grade Weather Station. Available online: https://www.campbellsci.com.au/grws100 (accessed on 21 November 2015).
- Katzfey, J.; Thatcher, M. Ensemble one-kilometre forecasts for the South Esk Hydrological Sensor Web. In Proceedings of the 19th International Congress on Modelling and Simulation, Perth, Australia, 12–16 December 2011; pp. 3511–3517.
- Rew, R.; Davis, G. NetCDF: An interface for scientific data access. IEEE Comput. Graph. Appl. 1990, 10, 76–82. [Google Scholar] [CrossRef]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms, 1st ed.; Wiley: New York, NY, USA, 2009. [Google Scholar]
- Coello, C.C.; Lamont, G.B.; Veldhuizen, D.A.V. Evolutionary Algorithms for Solving Multi-Objective Problems, 2nd ed.; Springer: New York, NY, USA, 2007. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evolut. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Fortin, F.A.; de Rainville, F.M.; Gardner, M.A.; Parizeau, M.; Gagné, C. DEAP: Evolutionary Algorithms Made Easy. J. Mach. Learn. Res. 2012, 13, 2171–2175. [Google Scholar]
- Jong, K.A.D.; Spears, W.M. An Analysis of the Interacting Roles of Population Size and Crossover in Genetic Algorithms. In Parallel Problem Solving from Nature; Schwefel, H.P., Manner, R., Eds.; Springer Berlin Heidelberg: Berlin, Germany, 1990; pp. 38–47. [Google Scholar]
- Jong, K.D. Parameter Setting in EAs: A 30 Year Perspective. In Parameter Setting in Evolutionary Algorithms; Lobo, F.G., Lima, C.F., Michalewicz, Z., Eds.; Springer Berlin Heidelberg: Berlin, Germany, 2007; pp. 1–18. [Google Scholar]
- Yu, X.; Gen, M. Introduction to Evolutionary Algorithms; Springer: New York, NY, USA, 2010. [Google Scholar]
- Hubbard, K.G.; You, J. Sensitivity Analysis of Quality Assurance Using the Spatial Regression Approach—A case study of the Maximum/Minimum air temperature. J. Atmos. Ocean. Technol. 2005, 22, 1520–1530. [Google Scholar] [CrossRef]
- You, J.; Hubbard, K.G.; Goddard, S. Comparison of methods for spatially estimating station temperatures in a quality control system. Int. J. Climatol. 2008, 28, 777–787. [Google Scholar] [CrossRef]
- Timms, G.P.; de Souza, P.A.; Reznik, L.; Smith, D.V. Automated Data Quality Assessment of Marine. Sensors 2011, 11, 9589–9602. [Google Scholar] [CrossRef] [PubMed]
- Smith, D.; Timms, G.; de Souza, P.; D’Este, C. A Bayesian Framework for the Automated Online Assessment of Sensor Data Quality. Sensors 2012, 12, 9476–9501. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Budi, S.; De Souza, P.; Timms, G.; Malhotra, V.; Turner, P. Optimisation in the Design of Environmental Sensor Networks with Robustness Consideration. Sensors 2015, 15, 29765-29781. https://doi.org/10.3390/s151229765
Budi S, De Souza P, Timms G, Malhotra V, Turner P. Optimisation in the Design of Environmental Sensor Networks with Robustness Consideration. Sensors. 2015; 15(12):29765-29781. https://doi.org/10.3390/s151229765
Chicago/Turabian StyleBudi, Setia, Paulo De Souza, Greg Timms, Vishv Malhotra, and Paul Turner. 2015. "Optimisation in the Design of Environmental Sensor Networks with Robustness Consideration" Sensors 15, no. 12: 29765-29781. https://doi.org/10.3390/s151229765
APA StyleBudi, S., De Souza, P., Timms, G., Malhotra, V., & Turner, P. (2015). Optimisation in the Design of Environmental Sensor Networks with Robustness Consideration. Sensors, 15(12), 29765-29781. https://doi.org/10.3390/s151229765