Modeling and Analysis of Energy Conservation Scheme Based on Duty Cycling in Wireless Ad Hoc Sensor Network

Abstract
:1. Introduction
2. Related Works
3. Modeling and Analysis of Sensor Node State Transition Model
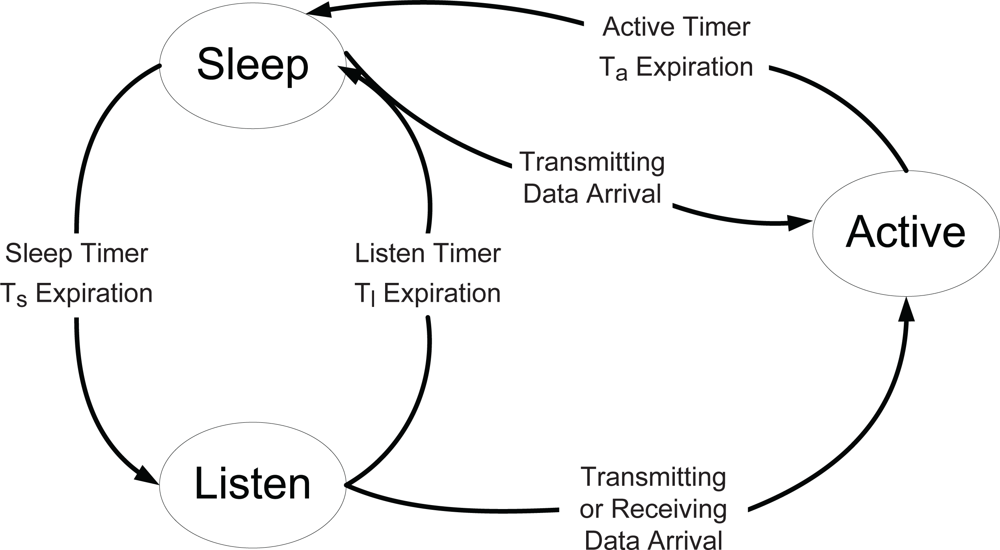
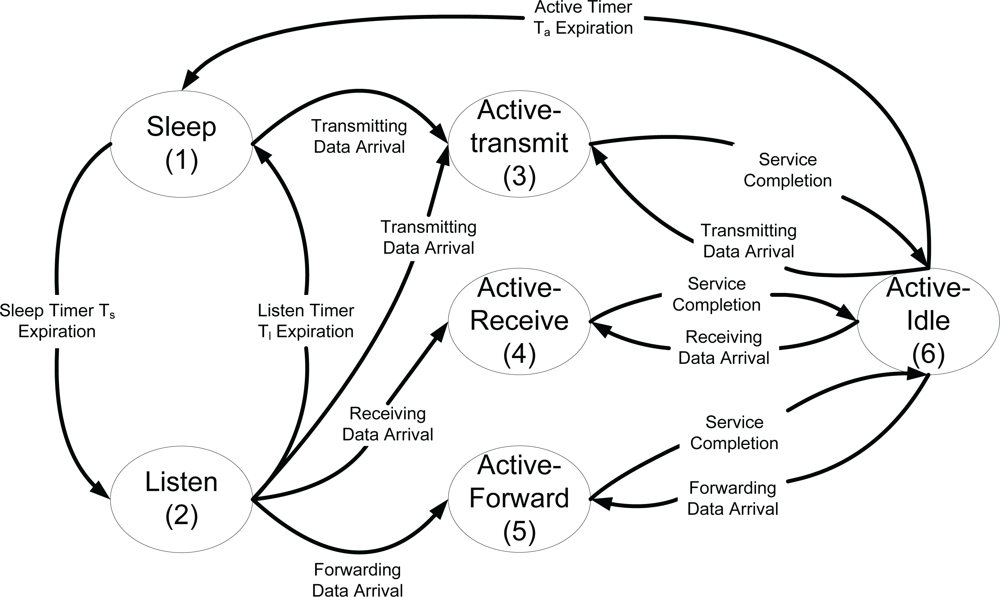
3.1. Modeling of Sensor Node State Transition
3.2. Derivation of Steady State Probability
- Transmitting, receiving, and forwarding data packets at a sensor node occur according to a Poisson process with parameters λt, λr, and λf, respectively;
- The time duration that a sensor node remains in active-transmit, active-receive, and active-forward states follows an exponential distribution with a mean value of 1 / μt, 1 / μr, and 1 / μf ;
- The values of sleep timer, listen timer, and active timer are assumed as constant and they are denoted by Ts, Tl, and Ta, respectively.
- Sleep timer expiration (T12);
- A transmitting data packet arrival (T13).
- Listen timer expiration (T21);
- A transmitting data packet arrival (T23);
- A receiving data packet arrival (T24);
- A forwarding data packet arrival (T25).
- Active timer expiration (T61);
- A transmitting data packet arrival (T63);
- A receiving data packet arrival (T64);
- A forwarding data packet arrival (T65).
4. Numerical Examples
4.1. Parameters Setting
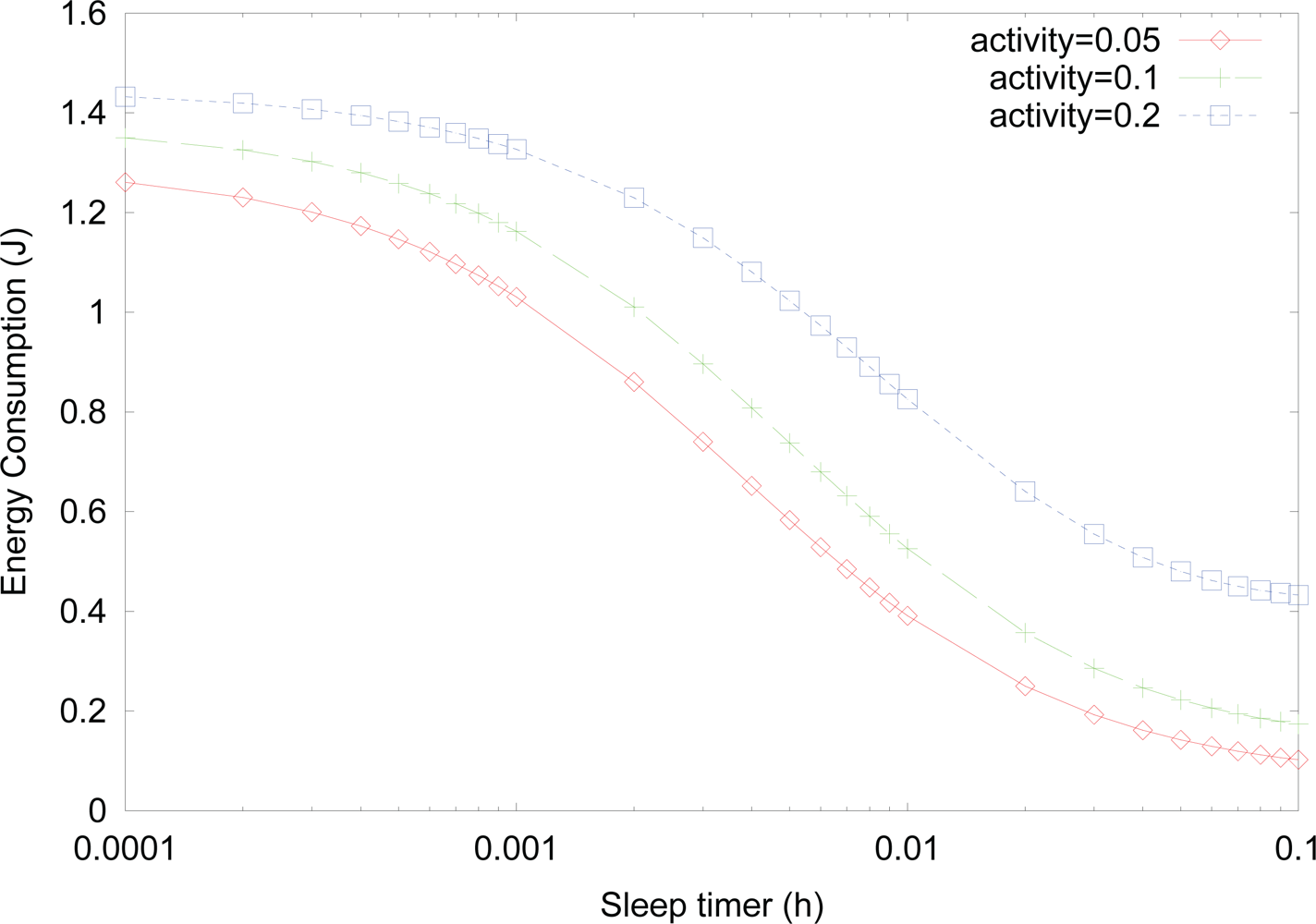
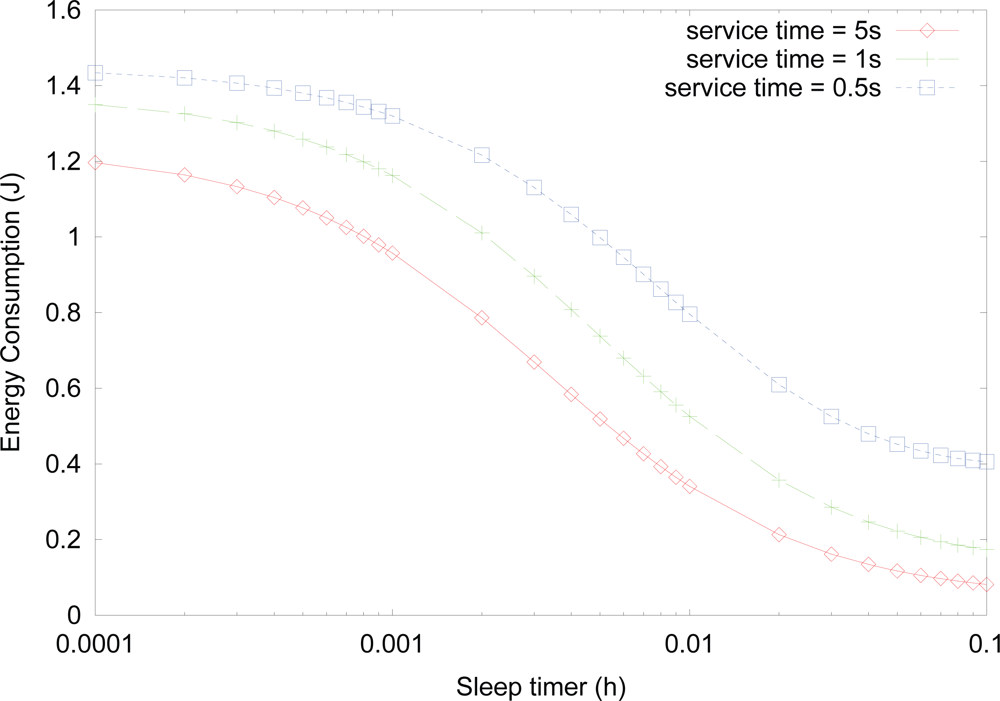
4.2. Effect of Sleep Timer, Ts
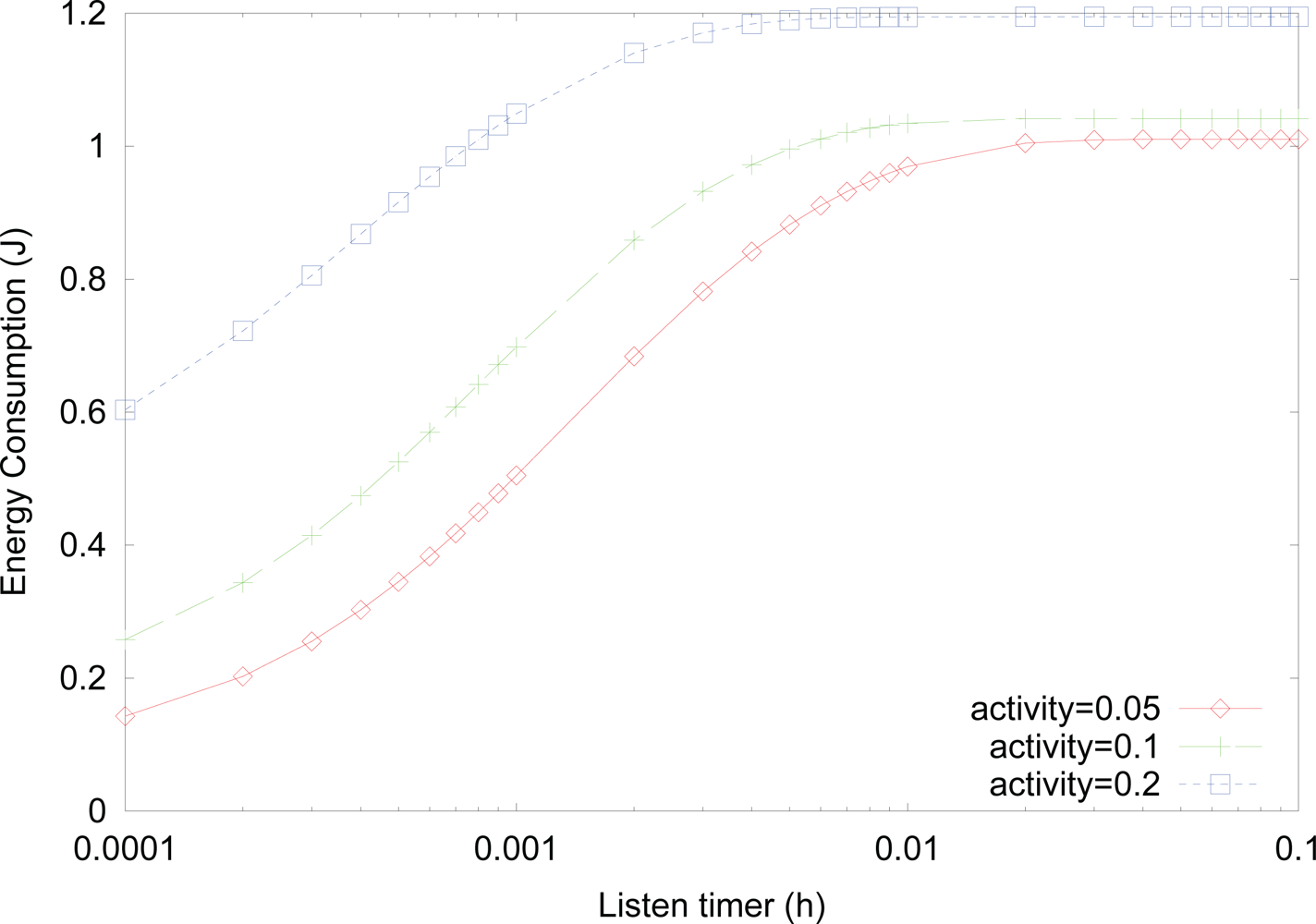
4.3. Effect of Listen Timer, Tl
4.4. Effect of Active Timer, Ta
4.5. Effect of λt
5. Conclusions and Further Works
Acknowledgments
References
- Akyildiz, I.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag 2002, 40, 102–114. [Google Scholar]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Elsevier Comput. Netw 2008, 52, 2292–2330. [Google Scholar]
- Pantazis, N.A.; Vergados, D.D. A Survey on Power Control Issues in Wireless Sensor Networks. IEEE Commun. Surv. Tutorials 2007, 9, 86–107. [Google Scholar]
- Anastasi, G.; Conti, M.; Francesco, M.D.; Passarella, A. Energy conservation in wireless sensor networks: A survey. ElsevierAd Hoc Networks 2009, 7, 537–568. [Google Scholar]
- Savvides, A.; Han, C.C.; Srivastava, M. Dynamic fine-grained localization in ad hoc networks of sensors. Proceedings of the ACM SIGMOBILE Annual International Conference on Mobile Computing and Networking, Rome, Italy, July 16–21, 2001; pp. 166–179.
- Stemm, M.; Katz, R.H. Measuring and reducing energy consumption of network interfaces in hand-held devices. IEICE Trans. Commun 1997, E80-B, 1125–1131. [Google Scholar]
- Jones, C.E.; Sivalingam, K.M.; Agrawal, P.; Chen, J.C. A survey of energy efficient network protocols for wireless networks. Wirel. Netw 2001, 7, 343–358. [Google Scholar]
- Vuran, M.C.; Akan, O.B.; Akyildiz, I.F. Spatio-temporal correlation: theory and applications for wireless sensor networks. Elsevier Comput. Netw 2004, 45, 245–261. [Google Scholar]
- Chakrbarti, A.; Sabharwal, B.; Zazhang, B. Using predictable observer mobility for power efficient design of sensor networks. Proceedings of the 2nd International Workshop on Information Processing in Sensor Networks, Palo Alto, CA, USA, April 22–23, 2003; pp. 129–145.
- Santi, P. Topology control in wireless ad hoc and sensor network. ACM Comput. Surv 2005, 37, 164–194. [Google Scholar]
- Xu, Y.; Heidemann, J.; Estrin, D. Geography-informed energy conservation for ad hoc routing. Proceedings of the ACM SIGMOBILE Annual International Conference on Mobile Computing and Networking, Rome, Italy, July 16–21, 2001; pp. 70–84.
- Chen, B.; Jamieson, K.; Balakrishnan, H.; Morris, R. Span: An energy-efficient coordination algorithm for topology maintenance in ad hoc wireless networks. Wirel. Netw 2002, 8, 85–96. [Google Scholar]
- Xu, Y.; Heidemann, J.; Estrin, D. Adaptive Energy-conservation Routing for Multi-hop Ad Hoc Networks; Technical Report 527; USC/Informaton Sciences Institute: Marina del Rey, CA, USA, 2000. [Google Scholar]
- Schugers, C.; Tsiatsis, V.; Srivastava, M.B. STEM: topology management for energy efficient sensor networks. Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, March 9–16, 2002.
- Keshavarzian, A.; Lee, H.; Venkatraman, L. Wakeup scheduling in wireless sensor networks. Proceedings of the ACM International Symposium on Mobile Ad Hoc Networking and Computing, Florence, Italy, May 22–25, 2006; pp. 322–333.
- Gao, Q.; Blow, K.J.; Holding, D.J.; Marshall, I. Analysis of energy conservation in sensor networks. Wirel. Netw 2005, 11, 787–794. [Google Scholar]
- Rai, V.; Mahapatra, R.N. Lifetime modeling of a sensor network. Proceedings of the Conference on Design, Automation and Test in Europte, Washington, DC, USA, March 2005; pp. 202–203.
- Noori, M.; Ardakani, M. A probability model for lifetime of event-driven wireless sensor networks. Proceedings of the 5th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, San Francisco, CA, USA, June 16–20, 2008; pp. 269–277.
- Ross, S.M. Stochastic Processes; John Wiley & Sons: Hoboken, NJ, USA, 1996. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Ts | |
| Tl | |
| Ta | |
| ρ | 0.1 |
| wf | 10 |
| λt | |
| λr | |
| λf |
| Parameter | Value |
|---|---|
| ψ1 | 0.025 W |
| ψ2 | 1.155 W |
| ψ3 | 1.6 W |
| ψ4 | 1.2 W |
| ψ5 | 1.6 W |
| ψ6 | 1.5 W |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Chung, Y.W.; Hwang, H.Y. Modeling and Analysis of Energy Conservation Scheme Based on Duty Cycling in Wireless Ad Hoc Sensor Network. Sensors 2010, 10, 5569-5589. https://doi.org/10.3390/s100605569
Chung YW, Hwang HY. Modeling and Analysis of Energy Conservation Scheme Based on Duty Cycling in Wireless Ad Hoc Sensor Network. Sensors. 2010; 10(6):5569-5589. https://doi.org/10.3390/s100605569
Chicago/Turabian StyleChung, Yun Won, and Ho Young Hwang. 2010. "Modeling and Analysis of Energy Conservation Scheme Based on Duty Cycling in Wireless Ad Hoc Sensor Network" Sensors 10, no. 6: 5569-5589. https://doi.org/10.3390/s100605569
APA StyleChung, Y. W., & Hwang, H. Y. (2010). Modeling and Analysis of Energy Conservation Scheme Based on Duty Cycling in Wireless Ad Hoc Sensor Network. Sensors, 10(6), 5569-5589. https://doi.org/10.3390/s100605569