Development of X-Y Servo Pneumatic-Piezoelectric Hybrid Actuators for Position Control with High Response, Large Stroke and Nanometer Accuracy

Abstract
:1. Introduction
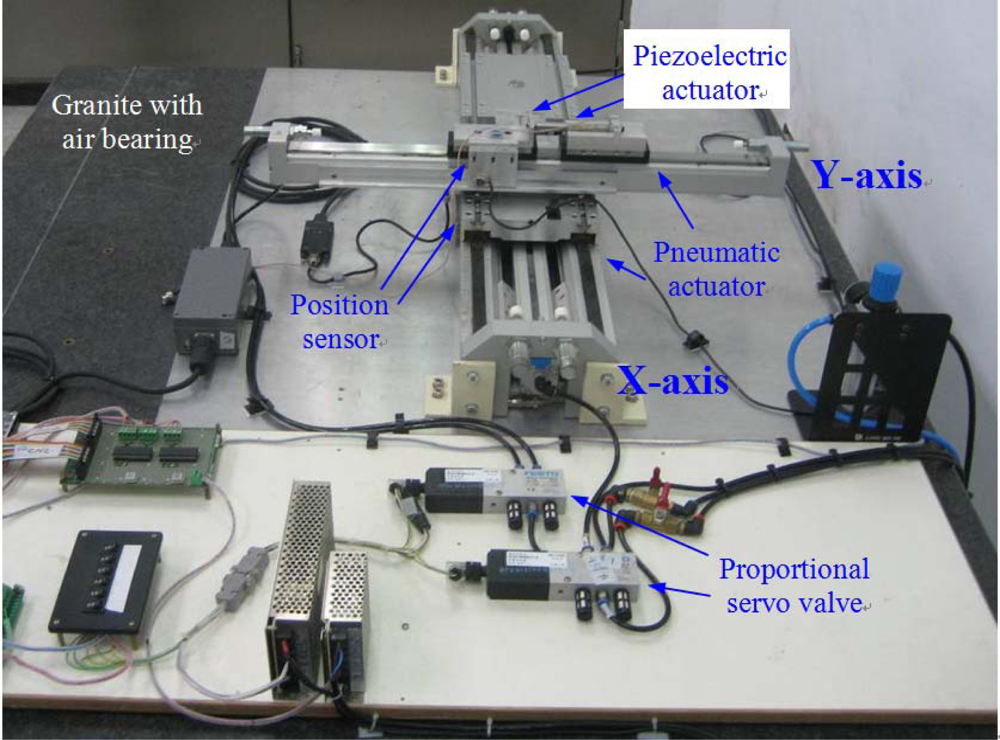
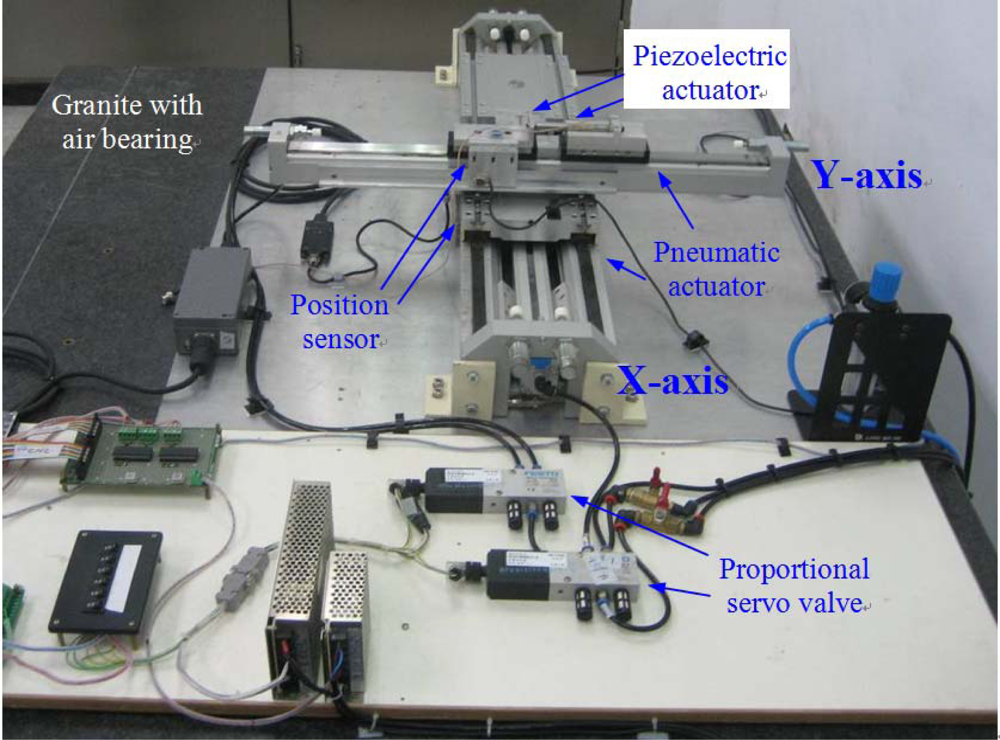
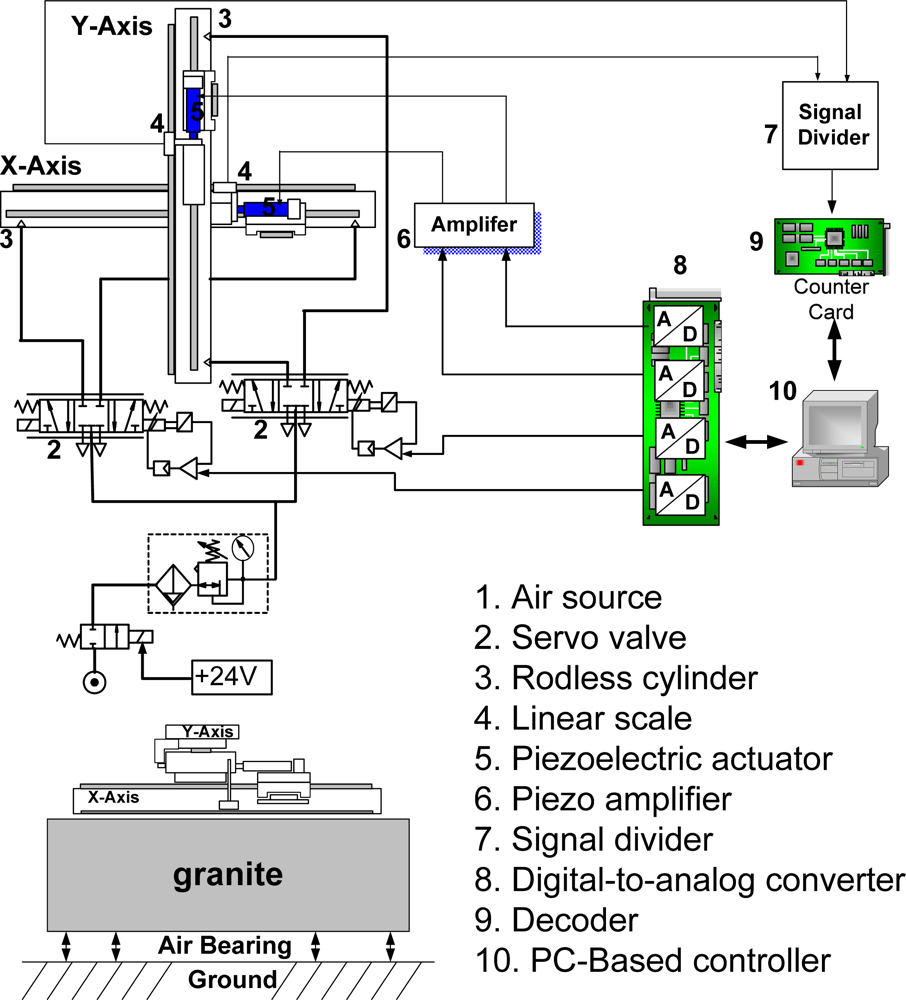
2. X-Y Dual-axial Pneumatic-piezoelectric Hybrid Actuator for Positioning Control
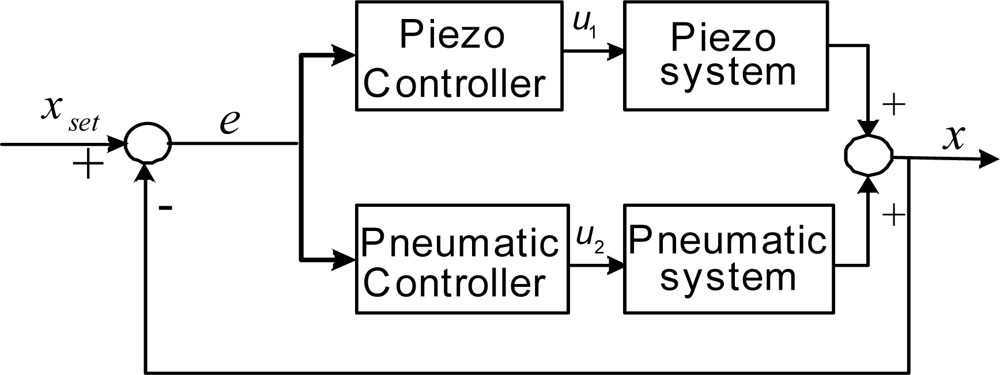
3. Controller Design
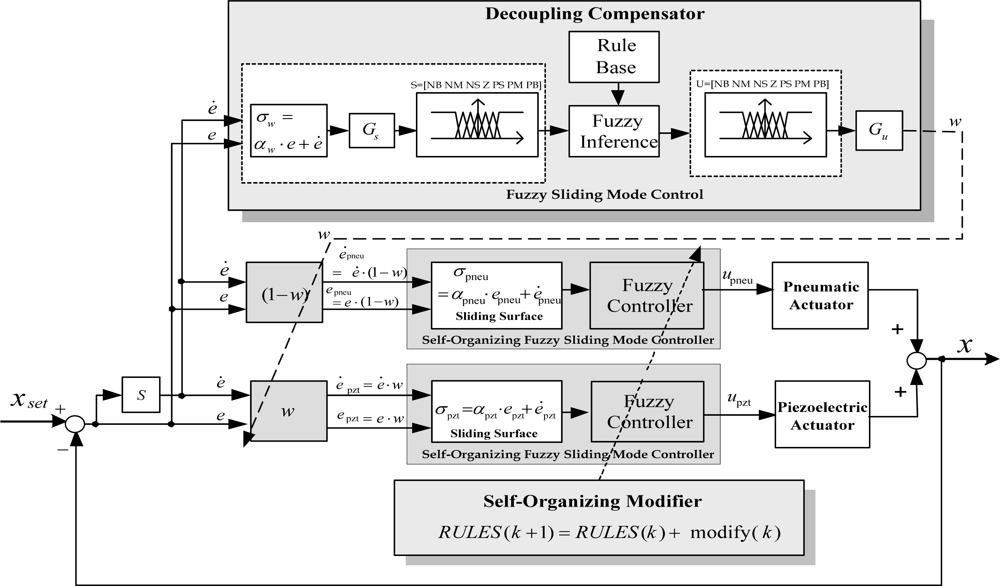
3.1. Self-Organizing Fuzzy Sliding Mode Control
3.2. Decoupling Compensator
3.2.1. Decoupling compensator for single axis
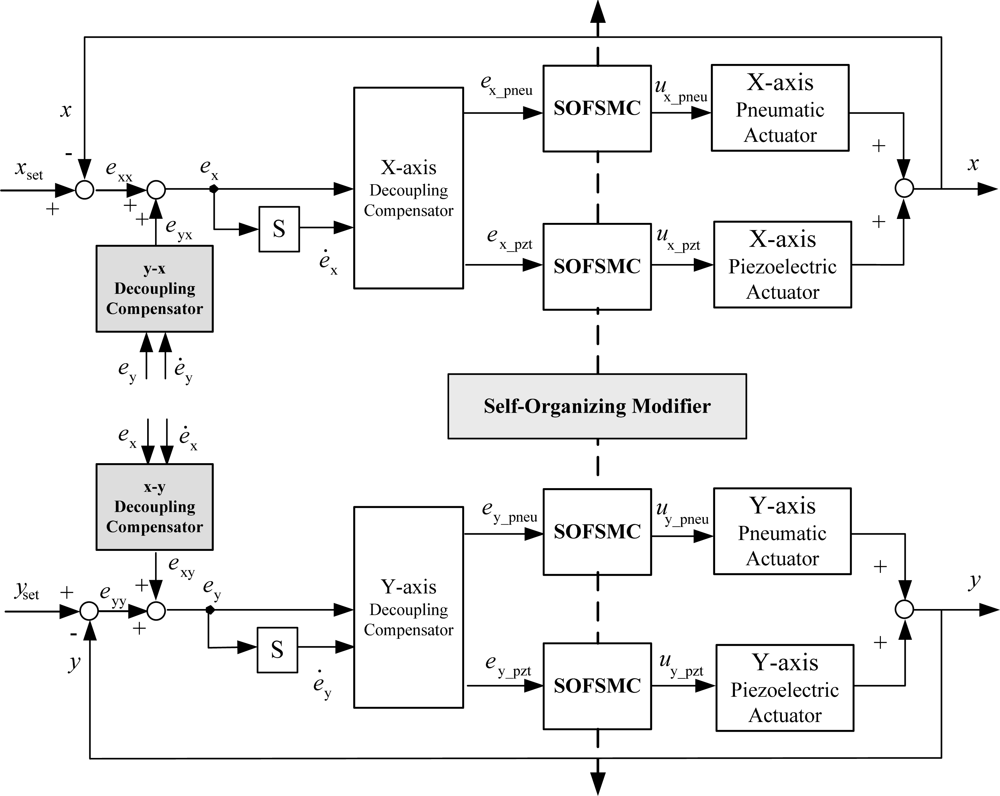
3.2.2. X-Y decoupling compensator
3.3. Controller Design
4. Experiments
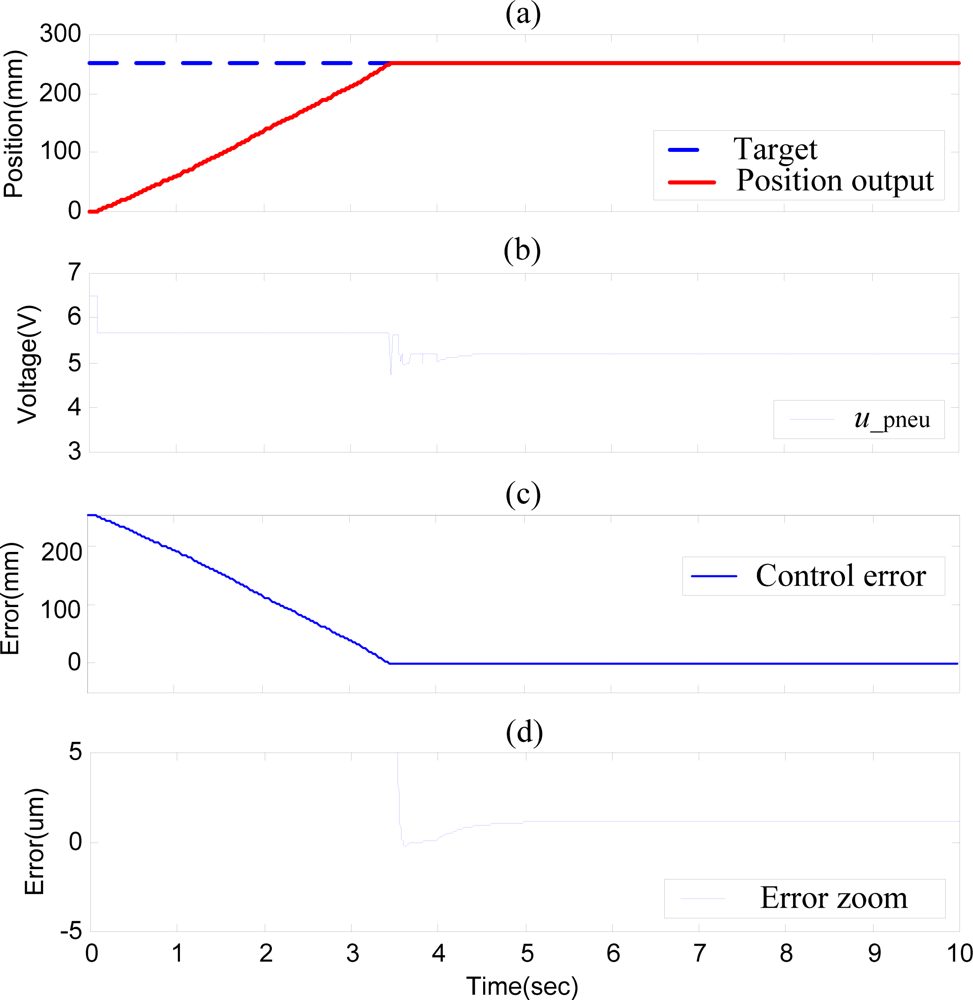
4.1. Position Control of Pneumatic Actuator
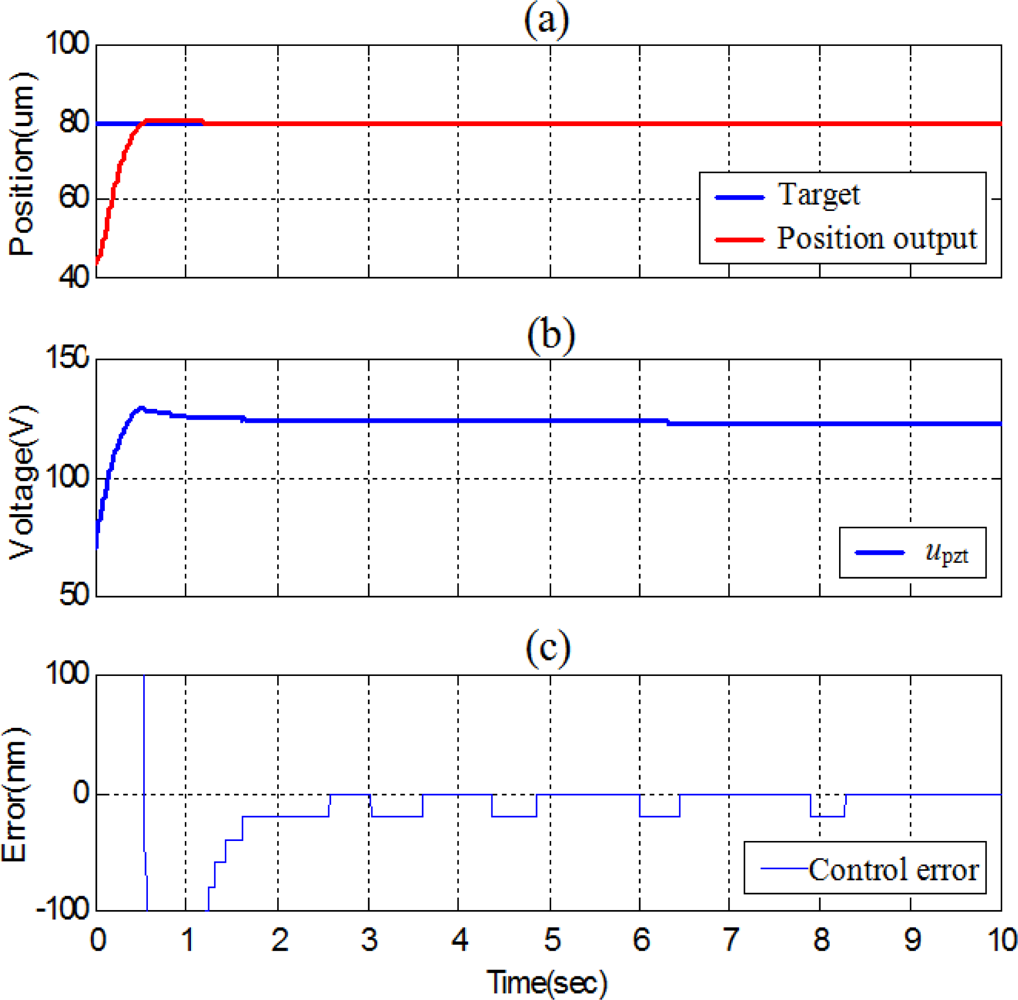
4.2. Position Control of Piezoelectric Actuator
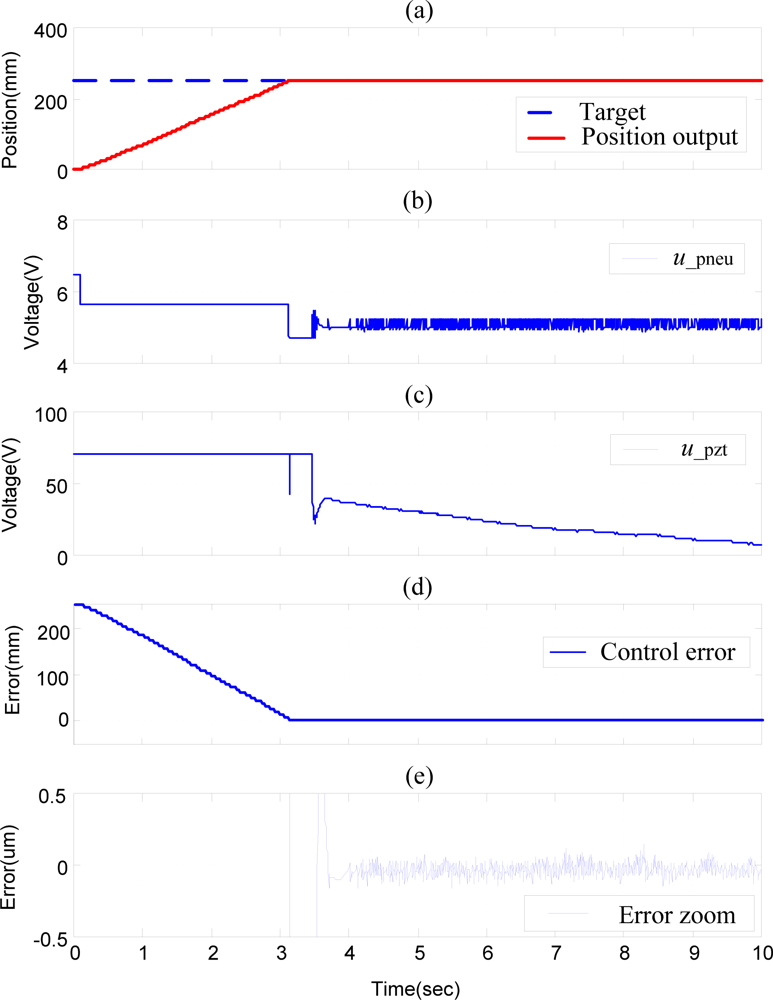
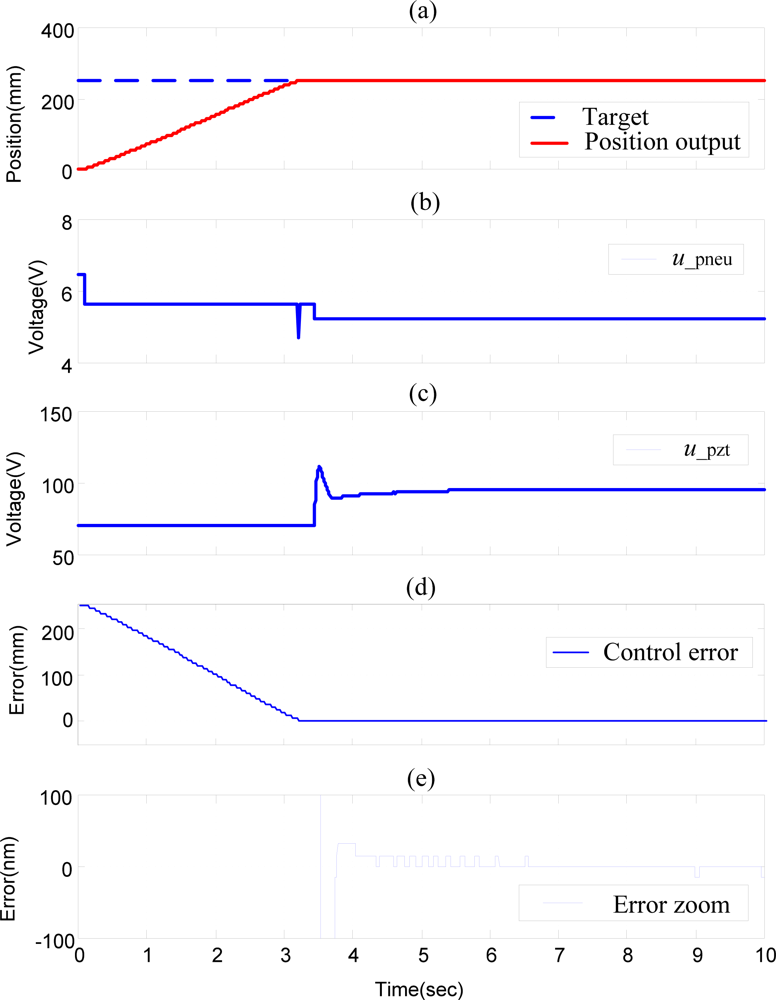
4.3. Position Control of the Pneumatic-Piezoelectric Hybrid Actuator for Single Axis
4.4. Robustness Test of the Pneumatic-Piezoelectric Hybrid Actuator for Single Axis
4.5. Position Control of the XY Dual-Axial Pneumatic-Piezoelectric Hybrid Actuators
5. Conclusions
Acknowledgments
References
- Evans, R.B.; Griesbach, J.S.; Messner, W.C. Piezoelectric microactuator for dual stage control. IEEE Trans. Magn 1999, 35, 977–982. [Google Scholar]
- Li, C.J.; Beigi, H.S.M.; Li, S.; Liang, J. Non-linear piezo-actuator control by learning self-tuning regulator. ASME J. Dyn. Syst 1993, 115, 720–723. [Google Scholar]
- Han, J.M.; Adriaens, T.A.; de Koning, W.L.; Banning, R. Modeling piezoelectric actuators. IEEE/ASME Trans. Mech 2000, 5, 331–341. [Google Scholar]
- Ge, P.; Jouaneh, M. Tracking control of a piezoceramic actuator. IEEE Trans. Contr Syst. Tech 1996, 4, 209–216. [Google Scholar]
- Tan, U.X.; Latt, W.T.; Widjaja, F.; Shee, C.Y.; Riviere, C.N.; Ang, W.T. Tracking control of hysteretic piezoelectric actuator using adaptive rate-dependent controller. Sensors Actuat. A-Phys 2009, 150, 116–123. [Google Scholar]
- Aphale, S.; Fleming, A.J.; Moheimani, S.O.R. High speed nano-scale positioning using a piezoelectric tube actuator with active shunt control. Micro Nano Lett 2007, 2, 9–12. [Google Scholar]
- Ru, C.; Chen, L.; Shao, B.; Rong, W.; Sun, L. A hysteresis compensation method of piezoelectric actuator: Model, identification and control. Control Eng. Pract 2009, 17, 1107–1114. [Google Scholar]
- Fujita, T.; Tokashiki, R.; Kagawa, T. Stick-slip motion in pneumatic cylinders driven by meter-out circuit. Proceedings of 4th JHPS International Symposium on Fluid Power, Tokyo, Japan; 1999; pp. 131–136. [Google Scholar]
- Shih, M.C.; Huang, Y.F. Pneumatic servo cylinder position control using a self-tuning controller. JSME Int. J. C 1992, 35, 247–254. [Google Scholar]
- Chiang, M.H.; Lee, L.W.; Kuo, C.F.; Chen, Y.N. A H∞ tracking-based adaptive sliding-mode controller for nonlinear pneumatic path tracking systems via a functional approximation approach. J. Chinese Soc. Mech. Eng 2009, 30, 83–94. [Google Scholar]
- Chiang, M.H.; Chang, Y.S. Intelligenter hybrider Pneumatik-Piezo-Aktuator zur Lageregelung mit großem Hub und hoher Genauigkeit (in German). Ölhydraulik und Pneu 2003, 6, 431–435. [Google Scholar]
- Chiang, M.H.; Chen, C.C.; Chow, D.N. High precision pneumatic-piezoelectric hybrid positioning control using adaptive discrete variable structure control. Mechatronics 2005, 15, 523–545. [Google Scholar]
- Chiang, M.H.; Chien, Y.W. Parallel control of velocity control and energy-saving control on a hydraulic valve-controlled system using self-organizing fuzzy sliding mode control. JSME Int. J. C 2003, 46, 224–231. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Specification |
|---|---|
| Pneumatic actuator | X-axis: Piston diameter: φ25 mm Stroke: 600 mm Y-axis: Piston diameter: φ25 mm Stroke: 500 mm |
| Piezoelectric actuator | Stack type Stroke: 100 μm Driving voltage: 0∼150 V |
| Piezoelectric amplifier | Input : 0∼5V Output: 0∼150 V |
| Proportional servo valve | 5/3 directional flow control valve Driving voltage:0∼10 V Rated volume flow: 700 L/min. Max. hysteresis: 0.4% –3 dB Bandwidth: 125 Hz for 100% stroke |
| Linear encoder | Resolution: 20 nm |
| Data acquisition card | 12 bits D/A (digital-to-analog); 16 bits DIO (digital input/digital output) |
| Counter card | 3 × 24-bits counters 1.0 MHz input rate |
| PC-Based Controller | Industrial PC Pentium 4 CPU |
| (a) Pneumatic controller | |
| αpneu = 50 | Gs = 0.1 |
| Gu = 0.8 | γV / MV = 0.001 |
| T(σpneu) ={−1, −0.67, −0.1, 0, 0.1, 0.67, 1} | |
| T(upneu) ={−1 −0.66 −0.33 0 0.33 0.66 1} | |
| (b) Piezoelectric controller | |
| αpzt = 50 | Gs = 4.8 |
| Gu = 0.4 | γV / MV = 0.0007 |
| T(σpzt) ={−1 −0.25 −0.01 0 0.01 0.25 1} | |
| T(upzt) ={−0.5 −0.22 −0.01 0 0.01 0.22 0.5} | |
| (c) Decoupling compensator - single axis | |
| αw = 4 | Gs = 0.5 |
| Gu = 0.8 | |
| T(σpzt) ={−1 −0.4 −0.1 0 0.1 0.4 1} | |
| T(upzt) ={−1 −0.6 −0.3 0 0.3 0.6 1} | |
| (d) Decoupling compensator—XY axis | |
| αxy = 4 | Gs = 0.02 |
| αyx = 4 | Gu = 0.04 |
| T(σyx) ={−0.1 −0.004 0 0.005 0.1} | |
| T(uyx) ={−0.025 −0.0125 0 0.0125 0.025} | |
| T(σxy) ={−0.1 −0.005 0 0.0005 0.1} | |
| T(uxy) ={−0.05 −0.025 0 0.025 0.05} | |
| X-axis response | Y-axis response | |||
|---|---|---|---|---|
| without X-Y decoupling controller | with X-Y decoupling controller | without X-Y decoupling controller | with X-Y decoupling controller | |
| Rising time tr | 3.034 s | 3.035 s | 2.545 s | 2.555 s |
| Steady state error ess | 20 nm at 4.035 s | 20 nm at 3.425 s | 20 nm at 4.205 s | 20 nm at 3. 553 s |
© 2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Chiang, M.-H. Development of X-Y Servo Pneumatic-Piezoelectric Hybrid Actuators for Position Control with High Response, Large Stroke and Nanometer Accuracy. Sensors 2010, 10, 2675-2693. https://doi.org/10.3390/s100402675
Chiang M-H. Development of X-Y Servo Pneumatic-Piezoelectric Hybrid Actuators for Position Control with High Response, Large Stroke and Nanometer Accuracy. Sensors. 2010; 10(4):2675-2693. https://doi.org/10.3390/s100402675
Chicago/Turabian StyleChiang, Mao-Hsiung. 2010. "Development of X-Y Servo Pneumatic-Piezoelectric Hybrid Actuators for Position Control with High Response, Large Stroke and Nanometer Accuracy" Sensors 10, no. 4: 2675-2693. https://doi.org/10.3390/s100402675
APA StyleChiang, M.-H. (2010). Development of X-Y Servo Pneumatic-Piezoelectric Hybrid Actuators for Position Control with High Response, Large Stroke and Nanometer Accuracy. Sensors, 10(4), 2675-2693. https://doi.org/10.3390/s100402675