1. Introduction
To preserve biodiversity, it is important to monitor the population sizes of threatened and endangered animal and plant species [
1] for the fastest and most effective intervention. From the same point of view, it is equally essential to know the population size of common species that can be hunted, including different ungulate species, as they can have a significant impact on the heterogeneity of their environment, habitat, and the diversity of local vegetation and animal communities [
2,
3].
The European roe deer (
Capreolus capreolus) is the most common and widespread deer species throughout Europe [
4,
5,
6,
7,
8]. The species is of great importance for wildlife management from a trophy hunting point of view [
9], but the utilisation of game meat is also a significant source [
10]. Roe deer are also involved in different conflicts, especially car collisions [
11] and forest or agricultural crop damage [
12], all of which require adequate planning of the management of the species [
13,
14]. In some cases, the conservation of the species can also be an issue [
15].
In Europe, a high number of countries lack a formal agreement on methods to be used for the population census of game species, including roe deer [
16]. During the preparation of the annual game management estimates and plans, the reported roe deer density is often based on an opinion, which can lead to an underestimation of the population [
17]. According to Marcon et al. [
7], an accurate estimate of population density is essential for efficient roe deer management.
There is no universal population estimation method that could be performed effectively and cheaply in any circumstances; all can be optimally used under different habitat conditions as well as with different accuracy and reliability; in many cases, several methods have to be used at the same time for an acceptable result [
18]. The choice of the optimal population estimation method depends on the conditions, the type of habitat, the possible costs, and the required degree of accuracy [
19].
The methods of population reconstruction [
20,
21,
22,
23] and mark and recapture techniques [
24,
25,
26] can be effective methods; however, in the latter, two-thirds of the individuals should be marked for a sufficiently accurate estimation of roe deer population density [
25,
27]. Anyhow, game management units have limited resources for the proper use of those solutions. Although the photographic capture–recapture approach with motion-sensitive trail cameras is mentioned as a valuable and cost-effective estimate [
28], the relative cost of estimating with a necessary number of camera traps is still high [
7] and not suitable for estimating deer populations in large open areas because of the lack of landmarks (i.e., trees) to place cameras [
29].
The method of pellet group count showed too much variance based on the study by Marcon et al. [
7]. Drive count [
7,
30,
31,
32] is a popular method for estimating the density of ruminant game species, but judging the reliability and accuracy of the method divides the experts. A spotlight [
33,
34,
35] and infrared and thermal cameras [
33,
36] have also been used for estimating wildlife species, but the result may be affected by the size of the animal, the coat, the land cover, and weather conditions in different ways. The line transect method is popular among researchers and is increasingly used to estimate game species; however, many conditions must be met for the method to be accurate. For example, Burnham et al. [
37,
38] considered it an inaccurate method. Waltert et al. [
18] suggest that the line transect is an inappropriate method for estimating roe deer populations. In their work, the random encounter model (REM) was compared with the line transect method for roe deer, and the line transect approach resulted in 81–86% underestimation compared to REM. Counting in strip transect may be an appropriate method, and many researchers have successfully used it to estimate European brown hare (
Lepus europaeus) populations, which occupy similar habitats to roe deer [
35,
39,
40].
The methodological review published by Meriggi et al. [
31] shows that various techniques are applied in Europe to estimate the population size of roe deer. It is clear that the cheaper, easy-to-implement solutions are incorporated and retained in everyday practice. Off-road cars, binoculars for daytime observation, and high-performance spotlights for night surveys are available to all game management units. Thermal imaging is also an increasingly common tool in hunting, but for censuses supporting management planning, it is not frequently involved yet.
The size of the roe deer population in Hungary is also remarkable. Moreover, they are the only antlered big game species accessible to most Hungarian trophy hunters [
41]. However, the officially reported size of the Hungarian roe deer population can be questionable due to the lack of universally accepted and widely used population density estimation methods [
23]. Most game management units in Hungary do not conduct a scientifically-based estimate for the roe deer population. According to Bertóti et al. [
42], already in the 1980s, the lack of knowledge about the quantitative and qualitative status of the roe deer populations was considered to be one of the main shortcomings of game management.
Thus, in this study, four estimation methods were compared, which are probably easier to perform by game managers: (1) total counting in strip transect in daytime between 0 and 500 m, (2) total counting at night, with a spotlight in strip transect between 0 and 250 m, and (3) total counting at night with a thermal camera from observation points in two different distance intervals: (a) between 0 and 250 m and (b) between 0 and 500 m.
Based on the daily activity pattern of roe deer and the expected good visibility by a thermal camera, the highest population density value was predicted to be obtained by the thermal imaging methods, and the lowest density was predicted to be revealed by the daytime strip counting. It was also supposed that the roe deer populations are underestimated by game managers; therefore, a greater roe deer density was expected to be determined by these studies than officially reported.
2. Materials and Methods
2.1. Study Area
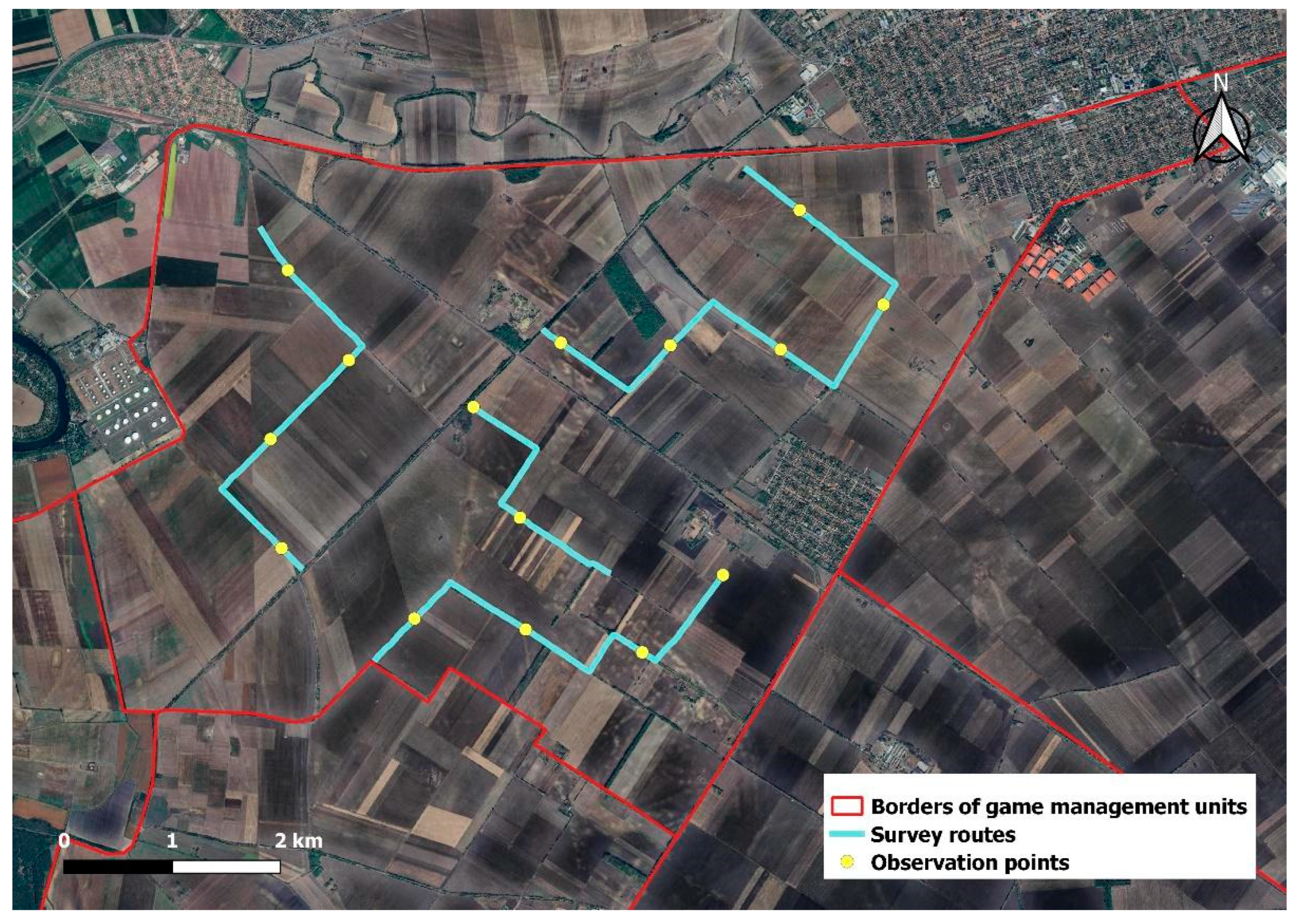
A comparison of estimation methods was performed in seven hunting areas of different game management units. All study sites were designated in the same game management region in Jász-Nagykun-Szolnok county, on the Hungarian Great Plain (
Figure 1).
Each study site is typically a flat lowland dominated by high-visibility open areas and with low forest cover (<4%), where the most numerous mammalian game species are the roe deer and the European brown hare.
The study site I. is 38 km2. The area is characterised by intensively farmed agricultural land, which is interrupted by protective forest strips and a few hectares of forest patches. The water supply is poor, and no natural or artificial surface water is available.
The study site II. is a 34 km2 unit that is also under intensive farming, containing few protective forest strips and forest patches. However, there are a large number of irrigation canals, and their water supply is excellent at a regional level.
The study site III. covers 59 km2. A part of this area is also characterised by intensive agriculture with irrigation canals. The cultivation is less intensive in areas of poorer soils where the parcel sizes are also smaller. The area is bordered for several kilometres by the Hármas-Körös River, providing floodplain areas.
The study site IV. occupies 72 km2. A smaller part of the area is characterised by intensively cultivated agricultural land with many irrigation canals. However, most of the territory consists of smaller agricultural parcels due to poorer soil conditions, thus offering a more diverse habitat. Surface water is only available at the Tisza River and some saline lakes. The area is bisected by the newly built M44 motorway, which completely isolates the two parts of the area.
The study site V. is 53 km2. The area is heavily drained and characterised by sometimes extremely intensive agricultural cultivation. There is an opportunity for irrigation in a large area. The landscape is divided by a high-conductivity irrigation channel, which provides surface water for wildlife. In the whole area, the water supply is good.
The study site VI. includes 38 km2 suitable for game management. It is characterised by intensive agricultural cultivation. The surface water is absent except for the high-conductivity irrigation canal running along one of the borders of the study area. There is an oak (Quercus robur) forest patch of 1.3 km2, but the entire forest cover of the site remains under 4%.
The last site (VII.) of 42 km2 is also intensively cultivated and irrigated. A high-conductivity irrigation canal passes through the area. It is very low forested, and there are just a few field protection forest strips.
In all seven sites of the study area, the main crops grown are winter wheat (Triticum aestivum), winter barley (Hordeum vulgare), maize (Zea mays), sunflower (Helianthus annuus) and rape (Brassica napus). The roe deer is hunted everywhere in this region of Hungary, but other small game (i.e., brown hare and pheasant; Phasianus colchicus) are also important for game managers. In each site, the hunting right was rented to hunting companies, except the last one, where the landowner does not rent the right to hunt but performs the game management tasks as an agricultural joint stock company.
All four estimation methods were performed in each study site. For this purpose, survey routes were pre-planned on a map with competent professional hunters of the study area. Different numbers of transects were designated (between 4 and 10) in the sites. The routes were selected considering the representativity of different habitat types and on the basis of traffic conditions and opportunities to use the dirty roads. The perceived density of deer populations and their distribution in the area did not affect the designation. It was also taken into account that the sampled areas along transects should not overlap even for the widest daytime strip transects. The locations of the routes were recorded each time during the first daytime estimation in the site with a Garmin 64 S handheld GPS in EOV coordinates (the uniform national projection system for the Hungarian civilian base maps (HD72/EOV). The routes of the daytime investigations and night spotlight method were the same. Thermal camera observation points were laid down along these routes, and their positions were recorded at the first daytime estimation (
Figure A1). At least one km in flying distance was kept between points in order to avoid overlapping between sampling circles with a radius of 500 m. The length of the total observation paths designated in each study site ranged between 17.52 and 30.44 km, while the number of survey points was between 15 and 26 (
Table 1). Consequently, the ratio of sample area to the whole hunting area moved within an interval of 30.4–58.8% for daytime observations, 15.4–29.3% for spotlight countings, and 4.8–9.1% and 19.1–38.5% for thermal camera survey within 0–250 and 0–500 m ranges, respectively. Observations were performed once in each site between mid-January and mid-March, but three times at one of them (Study site I;
Table 1).
In all sites, all four methods were performed on the same days, meaning that during the daytime, the daylight strip transect method was performed, and on the same evening, spotlight counting and thermal imaging methods were carried out, except for Study site VII. There, the daytime observation was not followed by the night-time estimations on the same day but two days later due to adverse weather conditions. The research days were windless or slightly windy without rain and fog, ensuring that the weather conditions did not affect the work.
2.2. Methods of Field Data Collection
All estimation procedures in the hunting areas were performed by the first author (G.T.) with the help of the competent local professional hunter driving the off-road vehicle.
During the daytime observation, a complete count was performed in strip transects [
40]. During the procedure, the previously designated transects along dirty roads were followed by a car at a speed of 5–10 km/h. The work started just after sunrise, and it took 3 to 5 h to traverse the routes, depending on their total length in each site. Along the transects, both to the right and left, the sighted roe deer individuals were counted on the road and within 500 m; thus, a 1 km wide strip was created. Observers counted deer on their side of the road according to their position in the car. In the case of roe deer detection, the car stopped shortly to measure the exact perpendicular distance of the animal from the road to be sure it was within the distance range because it was not possible to use the distance measuring device and the telescope from a moving vehicle. Leica Geovid 8 × 56 R and Leica Trinovid 8 × 42 HD binoculars were used to clearly identify deer. Determination of the distance to the deer was solved by the distance metre function of the Leica Geovid 8 × 56 R binocular (measuring accuracy is ±1 m up to 350 m distance, and ±2 m from 350 m up to 700 m distance).
The width of the agricultural field units played a decisive role in determining the maximum observation distance, which is a naturally occurring measure of plough cultivation in Hungary. The width of Hungarian cultivated parcels was already around 600–700 m in the 18th century [
43]. In the Great Plain, this value became 550–600 m (due to the length of the cable of the steam plow). At the confluence of the agricultural parcels, characteristic protective forest strips were installed, which prevented monitoring over this distance range in this study. The 500 m observation distance provided unobstructed visibility. Where counting was impeded by the landscape feature or the location was not suitable for counting (dense strip of forest, forest patch, farm, fishpond, etc.), that section on the relevant side of the route was not taken into account when calculating the area of the strip transect. The total area of the unseen sections was calculated based on a georeferenced Google Satellite orthophoto raster using QGIS 3.4.12 software.
In terms of the spotlight method at night, a complete count was performed along strip transects [
40], applying the same routes as daylight. An AVIDE Entac 1200 lm LED spotlight powered by a 12-volt car cigarette lighter and a spotlight handmade by a recognised Hungarian professional hunter were used. The car was going at speeds of 5 to 10 km/h with short stops to determine the distance of roe deer individuals from the road. Along the route, we counted the sighted individuals within 250 m on both sides of the road and on the road; thus, a 500 m wide strip was applied. The maximum observation distance of 250 m was given by the first author (G.T.) and one of the competent professional hunters determined on the field in advance of the first survey. Within this range, roe deer detectability was certain with both types of spotlights.
Similarly to the daylight observations, the methods at night took 3 to 5 h to complete the census depending on the total length of survey routes. Naturally, in this case, the work was always conducted in the night darkness; therefore, the measurement task was initialised 1 h after sunset. The sighted deer were continuously counted from the slowly moving off-road car, but if needed for reliable recognition of an individual, the vehicle was stopped for a short time. The perpendicular distance of the deer from the route was obtained by the laser rangefinder function of the thermal camera type Pulsar XQ38 Accolade LRF (Pulsar, Vilnius, Lithuania). Unlike the daytime method, more non-visible sections were removed from later density calculations due to the forest strips obstructing the light of the spotlight.
The thermal imaging method was conducted on the principle of total counting in squares [
40], with the difference that the sample areas were not given by squares but by circles. This technique was applied simultaneously with the night spotlight estimation works, meaning that the observation points of this procedure were established along the spotlight (and the daytime) counting transects and the spotlighting task was interrupted at these points to use this other method. The observation points were selected, and their coordinates were recorded beforehand, in the daytime.
At the observation points, the observer (G. T.) got out of the vehicle, went a few metres, and looked around 360 degrees with the thermal camera (Pulsar XQ 38 Accolade LRF). He counted roe deer within 500 m and separately 250 m distance; thus, two distance intervals (0–250 m and 250–500 m) were obtained. The recording of the number of deer detected between 0 and 250 m was justified by the distance equal to the visibility range by the spotlight. Meanwhile, the more distant category made it possible to examine how the estimated roe deer density changes when observed by the thermal camera at a distance greater than the range of spotlighting. The exact distances of deer within 250 m and 500 m from the observation point were also determined by continuously measuring the distance in the “SCAN” mode of the thermal camera (
Figure A2).
To determine the detectability range by thermal camera, a priori testing was performed. A hunter colleague walked in a straight line away from us (from the observation point; i.e., 0 m) to the upper limit of probable visibility range. He stopped every 50 m (meaning cca. 2 m height at his head when standing) and then squatted down (cca. 1 m height), and a picture was taken of him in both postures with the image capture function of the thermal camera. The test was performed on five different field covers: autumn cabbage rape, autumn sowing, cultivated soil, autumn deep plowing, and lawns. According to the study, only the human person squatting in the autumn cabbage rape was not clearly recognizable up to a distance of 500 m (he could be identified up to 450 m). From 550 m onwards, the standing and squatting human figure became unrecognisable on several field covers; therefore, the applied distance of the thermal camera was determined at 500 m.
As usual, the invisible areas from the observation points were recorded and taken into account when calculating the sample area sizes per circle and the total area of the circles using GIS software.
2.3. Data Analysis
The population density calculations were based on roe deer individuals that were unambiguously detected visually during the surveys. No distance sampling was considered for use in the analysis since the aim was to compare techniques that could be easily used by game managers.
The number of individuals recorded on the field by the different estimation techniques and the sample area sizes calculated with the help of the GIS software were analysed in the Microsoft Excel spreadsheet program. For the daytime counting and night spotlight method, the visible area of strip transects per study site was added together, separately for both procedures. In this way, the size of the total sample area examined was obtained using the method used within every game management unit. Dividing the number of registered roe deer individuals by the obtained sample area size in the case of each game management unit for each day and each method, the roe deer population density data (individual/km2) were obtained for comparison. The roe deer densities estimated by thermal camera respectively to the sample circles of 250 m and 500 m radius were also calculated and summed separately to each study site. To compare the roe deer densities of the two thermal camera distance classes (within and beyond the spotlight range; i.e., 0–250 m and 250–500 m), the deer density within the ring delimited by the circles with a radius of 250 m and 500 m was calculated as the difference between the density values of sample circles obtained within a radius of 500 m and 250 m from the same observation point. In the case of the site where the research tasks were repeatedly performed three times, the arithmetic mean of the daily values for each method was taken into account when comparing the estimation methods between the sites.
Finally, four different estimations were compared: (1) daytime direct observations along strip transects within a 0–500 m distance range; (2) night-time spotlight surveys along strip transects within 0–250 m; (3) night-time censuses with a thermal camera from observation points within 0–250 m; and (4) 0–500 m intervals. The normal distribution of datasets to different methods involving the density values for each site was examined by the Kolmogorov–Smirnov test, and then the significant differences between the data series were tested by performing a repeated-measures ANOVA test followed by Tukey-Kramer multiple comparison test at a 95% confidence interval. For the nocturnal thermal camera procedures, a comparison was made between the density values within a radius of 250 m from the observation points and within a ring from 250 m to 500 m using a Wilcoxon signed-rank test at a 95% confidence interval.
The results of this study were also compared with the deer density data reported by the local game management units for that period, taking the average of the different methods in one case and their maximum estimated value in the other to check whether the officially reported data show underestimation. Paired t-tests were used for that purpose.
Statistical calculations were performed with GraphPad InStat 3.05 and Past 4.07b statistical software.
3. Results
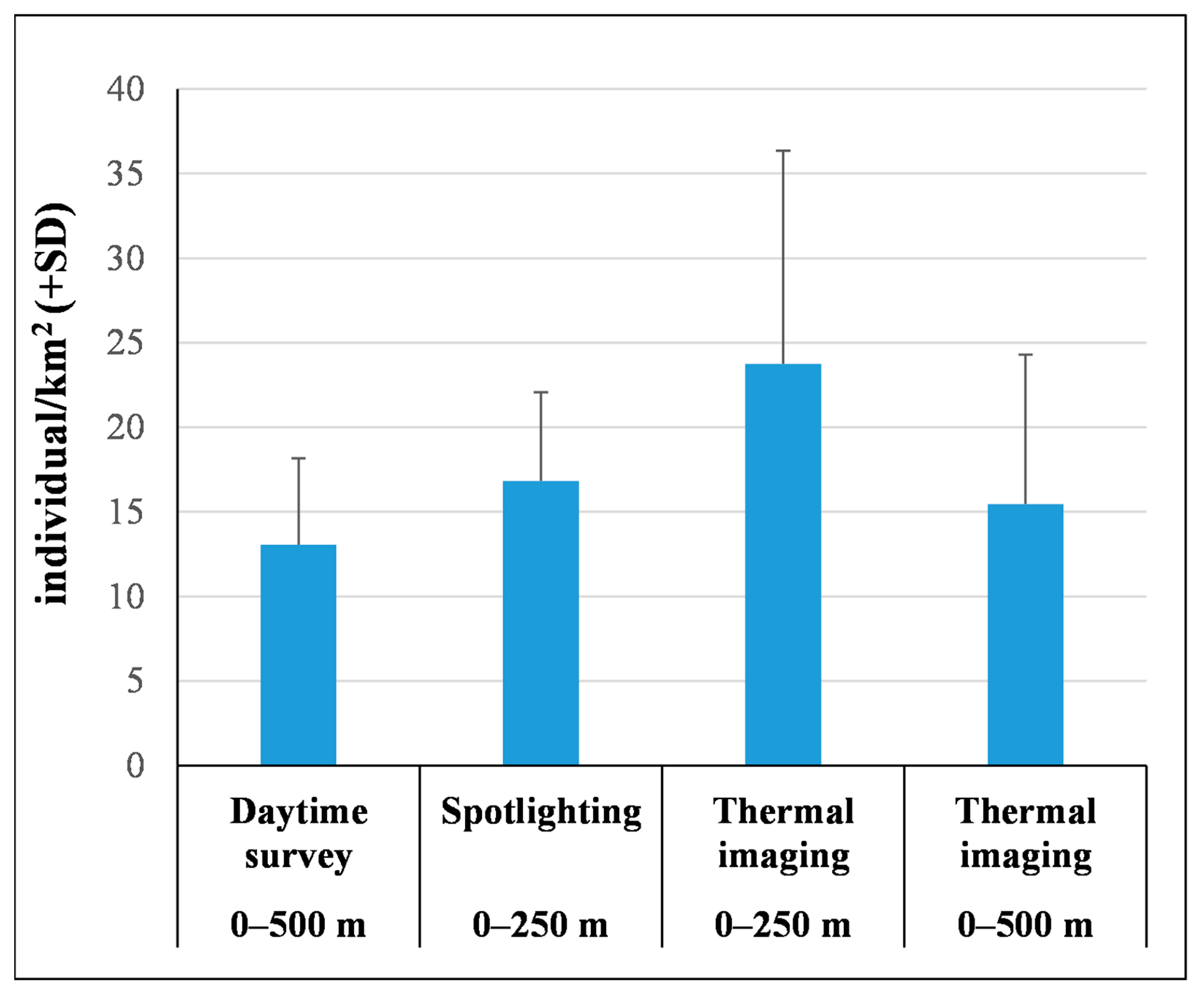
Comparing the roe deer population density estimates derived from the four methods, a significant difference between them was revealed (repeated-measures ANOVA: F(3.24) = 3.01;
p = 0.0059). The census using the thermal camera within a range of 0–250 m provided the highest average value, while the second highest average was given by the spotlight method. The least number of roe deer was detected during the daytime observations (
Figure 2).
Based on the results of the subsequent multiple comparative Tukey–Kramer test there was no significant difference (p > 0.05) in the population density values between 0 and 250 m applying the thermal camera or the spotlight method, probably due to the large variance shown by the thermal camera technique within this distance range. However, the estimated density values obtained by the thermal camera method in the 0–250 m range were significantly higher than for the 0–500 m range of this technique (p < 0.05) or than in the case of the daytime method (p < 0.01).
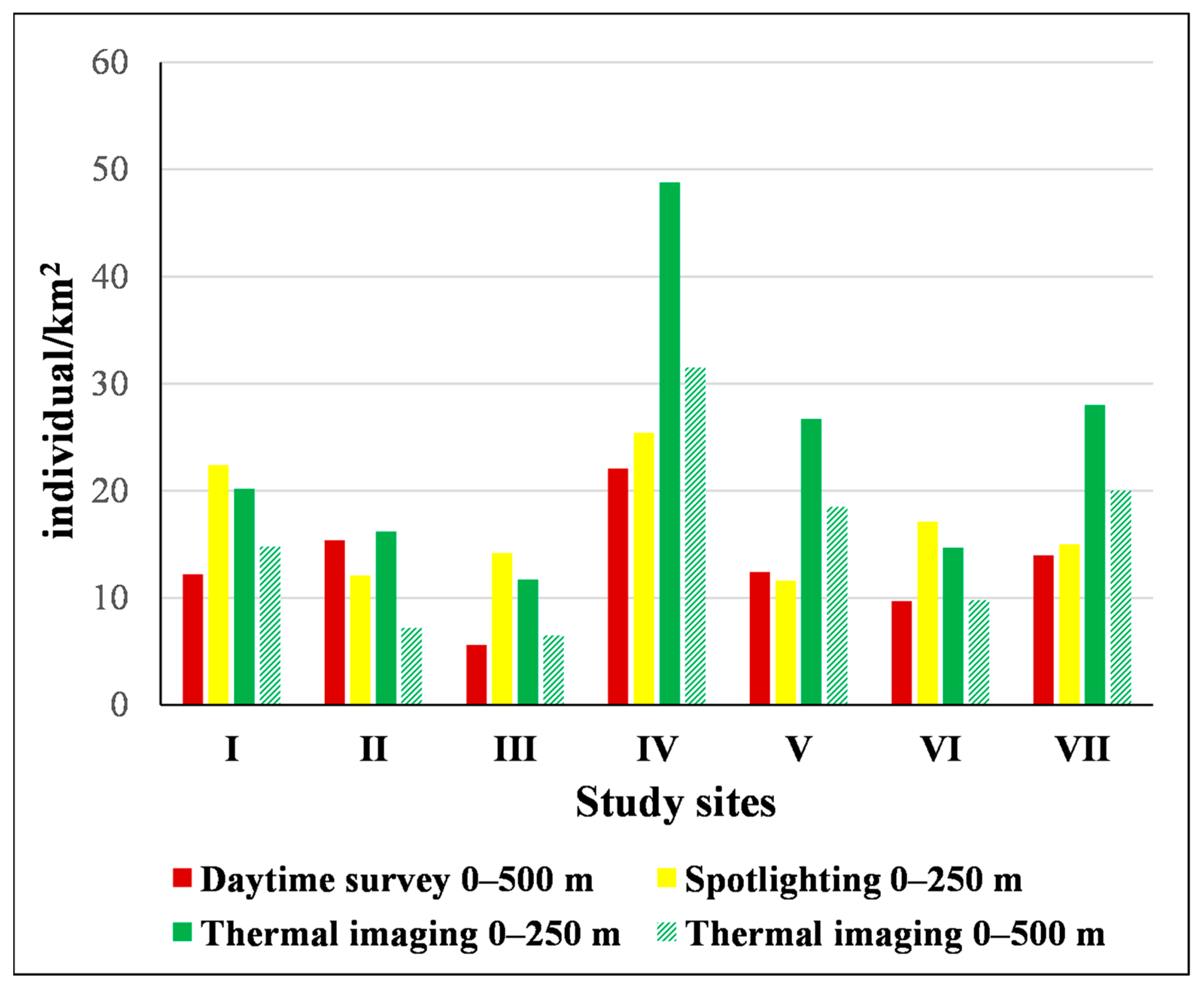
Four of the seven study sites had the highest absolute values obtained by the thermal imaging camera survey at the range of 0–250 m, while three of them achieved the highest value in the case of the spotlighting technique (within the same distance interval). At three hunting areas, the procedure of using the thermal camera in a larger spatial range (i.e., 0–500 m) also resulted in higher density values than those of spotlighting. Nevertheless, this type of estimation once provided the lowest density value, similar to spotlighting; however, that was true at five sites for daytime observations (
Figure 3).
As already suggested by the results mentioned above, the estimated population densities by thermal camera observations were significantly higher when using the closer distance range similar to spotlighting (0–250 m) from the observation points than the data obtained beyond it, from the 250–500 m ring (Wilcoxon paired test: N = 132; W = 3593,
p < 0.0001). The roe deer density was about two times higher when deer were checked in the shorter distance category than in the further one (
Figure 4).
The officially reported roe deer densities for that period were significantly lower at the studied game management units than the mean or the maximum value of the estimates of the four parallel methods used in this study (paired
t-test: for mean: N = 7, t = −3.48,
p = 0.013; for the max.: N = 7, t = −3.92,
p = 0.008; respectively) (
Table 2).
4. Discussion
This research showed that using a thermal imaging camera or spotlight searching for roe deer during the dark period within a distance of 250 m resulted in the highest population density values. Although there was no statistically significant difference between these two procedures, in absolute values, applying a thermal camera gave higher densities. Examining the areas one by one, the thermal camera estimates gave higher results in four cases and the spotlighting method in three cases. However, based on the data, in three of those four cases, using the thermal camera doubled the detection of roe deer relative to spotlighting. Meanwhile, the difference was not so obvious in the case of the opposite order. Moreover, the best-performing method between these two was not constant during the three days of repetition at Study site I. On the first two days, thermal imaging provided higher values, while on the third night, spotlighting provided higher values. It is also important to note that when counting in the range 0–250 m with the thermal imaging device, the ratio of the sample area to the whole study site was significantly lower (5–10%,
Table 1) than in the case of the other procedures (15–55%), meaning that the data obtained by this method could show a relatively high variability if the roe deer distribution in the game management unit were less even.
Focardi et al. [
33] also found no significant discrepancies between the density estimates of the protocols for red fox (
Vulpes vulpes) and fallow deer (
Dama dama) when comparing the performance of thermal infrared imaging and spotlighting. In contrast, in their study, wild boar (
Sus scrofa) and red deer (
Cervus elaphus) were more detectable by the thermal camera than by spotlight, with the exception of the winter period for the latter species. Similarly to some of the sites of the present study, on average, the application of the thermal camera was more efficient than spotlighting, which detected only 53.8% of the animals observed by thermal imaging. It was also clear in the present research that beyond the range of spotlighting (>250 m), the advantage of thermal imaging equipment has entirely disappeared. Likewise, Focardi et al. [
33] concluded that against expectations, the thermal imaging method did not seem more efficient than spotlighting at long distances.
Nevertheless, it is likely that Focardi et al.’s thermal camera characteristics must have resulted in a lower detection probability than the one used in the present study. The thermal camera that was used by Focardi et al. [
33] resolved temperature differences of 0.2 C with a temperature range of −5 °C to 100 °C, and it had liquid nitrogen coolant. The thermal camera that was used in the present study worked at 50 Hz; the display had 388 × 284 pixels, and the thermal sensitivity of its sensor was 40 mK.
According to Forsyth et al. [
44], based on 3870 deer abundance and density estimates, the most precise estimates were from vehicular spotlight counts and from capture–recapture analysis of images from motion-sensitive cameras. Cukor et al. [
45] used the same type of thermal camera (Pulsar Accolade with integrated rangefinder) that was used in this study. According to them, in the case of low deer density and high-forested areas, they could estimate much lower moose (
Alces alces) and maral deer (
Cervus elaphus sibiricus) densities than with faecal pellet group counts. However, in the case of novel methods, the advantage of drone-based thermal imagery was found over spotlighting in terms of estimation of brown hare abundance [
46].
According to all these findings, both techniques (thermal camera and spotlighting) can be recommended for estimating roe deer populations using 250 m observation ranges. Nevertheless, human and financial resources must be considered, too. The methods applying spotlight and thermal camera at 0–250 m require the same human resources and off-road vehicle and approximately the same time efforts, but the cost of the thermal imaging camera used in this study was very high (around 1,500,000 HUF, generally ranging between 3000–5000 EUR). This cost could be only justified if the thermal device would significantly reduce the labour cost of fieldwork or would lead to a much higher detection rate of deer within similar circumstances. Otherwise, practitioners who are not researchers but game managers will not feel that it is worth investing in this instrument.
Since those benefits are not unambiguous, a spotlight could be perfectly suitable for a wide range of uses if the thermal camera does not fit into the budget of a game management unit financially. Other problems can be derived from counting by thermal camera from consecutive observation points along the routes. Frequent stops at short distances and spending time there for observations getting out of the car can cause more disturbances at night than necessary relative to counting from a continuously moving vehicle along dirty roads. However, this impact on deer presence was not supported by the data from the investigations presented here.
Moreover, it is not justified to purchase and use a thermal imaging camera with a very high resolution, as Morelle et al. [
36] revealed that the use of a higher-resolution thermal camera does not result in a significantly higher estimated population density since it did not affect the detectability of roe deer. However, a comparative study involving thermal cameras of different qualities may be interesting because of the rapid development of technology.
In this study, based on the values of a total of 132 thermal camera observation points surveyed in the seven areas, the roe deer densities determined within 250 m were almost twice the ones obtained in a ring of 250–500 m distance range. As the preliminary visibility test of this study showed that the detectability of deer should not decrease up to 500 m, it can be concluded that in the night period, there were more roe deer closer to the roads, forest strips, and canals (along which the routes were designated). Nevertheless, a future examination may be targeted on the question of whether there are indeed more roe deer, closer to the line facilities, dirty roads, edges of agricultural parcels, forest strips, and canals that would allow establishing the observation routes during the night in areas with similar conditions to those in this study. Nevertheless, a Hungarian radiotelemetry analysis in this region suggested this since Schally et al. [
47] confirmed that none of the radiocollared roe deer bucks moved further than 1400 m from forest-like patches and 500 m from natural patches, and the density of location fixes halved at 250 m from the tree row-canal-dirty road complexes (natural habitat types) and dropped to only 1% at 500 m.
Supporting expectations, but somewhat surprisingly, counting in daytime strip transects resulted in the most severe underestimation. Although one might think that it is easier to recognise roe deer during daylight than in the darkness, probably due to their decreased daily movement and feeding activity in the daytime period (e.g., [
48], performed in this study area), even in extremely low forested areas only a small proportion of hiding individuals will be detected. Consequently, utilisation of adequate visualisation techniques during the night helps us to reach a higher detection rate of roe deer individuals due to their higher general activity level.
From a game management perspective, the most important aspect was to compare the estimates of this study with the officially reported roe deer densities for the study period at these game management units (estimates submitted in February 2020 and 2021 [
49,
50], respectively, have been taken into account). In accordance with the expectations, the official hunting data were significantly lower than the mean or the maximum value of the estimates of the four parallel methods. Even the daytime strip transect estimates with the lowest density values in the present study were two times higher than the deer population sizes reported by game managers. Since this procedure is simple to perform without strong scientific background and does not require special equipment in addition to the off-road car and binoculars, which are standard equipment in game management, one can assume that field data collection of the roe deer population is either not being carried out or its scientific rigour is highly questionable.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}