

Entropy-Inspired Aperture Optimization in Fourier Optics


Abstract
1. Introduction
2. Opto-Statistical Insight into the H-Theorem
3. Fourier Optics and Imaging Entropy
4. Experimental Setup
4.1. Imaging System
4.2. Object Mask
5. Validating the Technique
5.1. Image Post-Processing
5.2. Entropy Calculation
- Take the absolute order of magnitude of the smallest pixel value: .
- Find the logarithms as
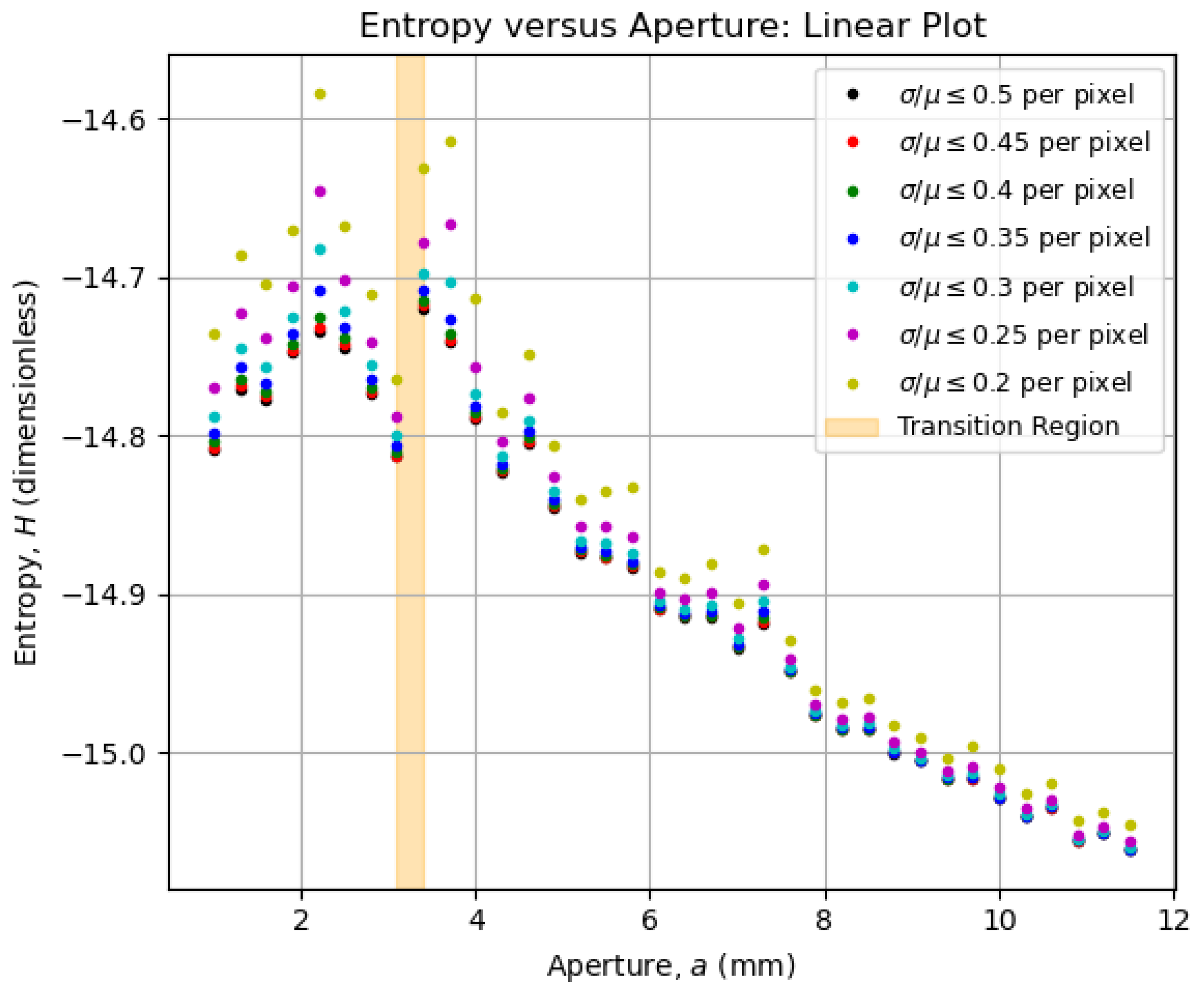
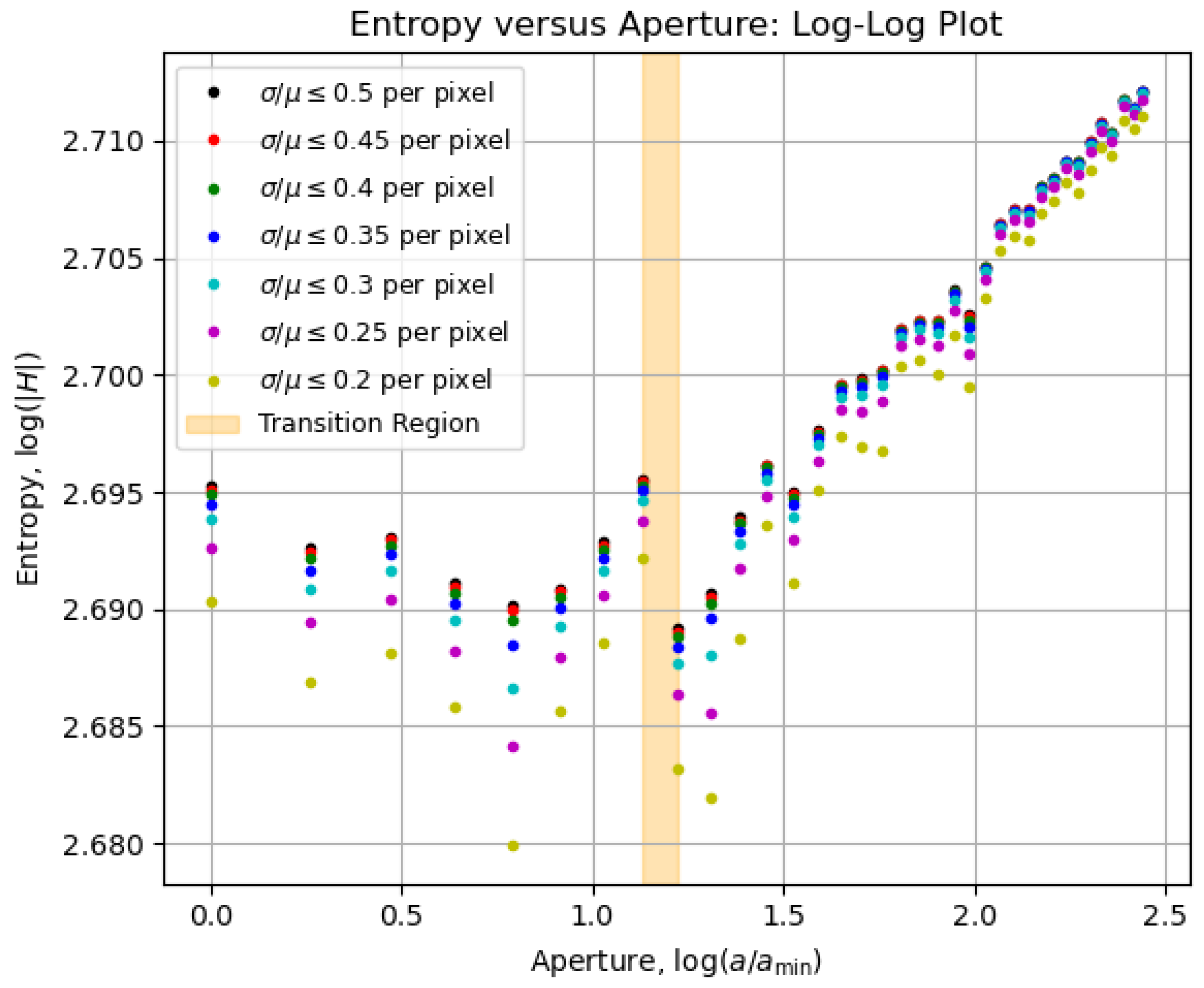
5.3. Entropy vs. Aperture Diagrams
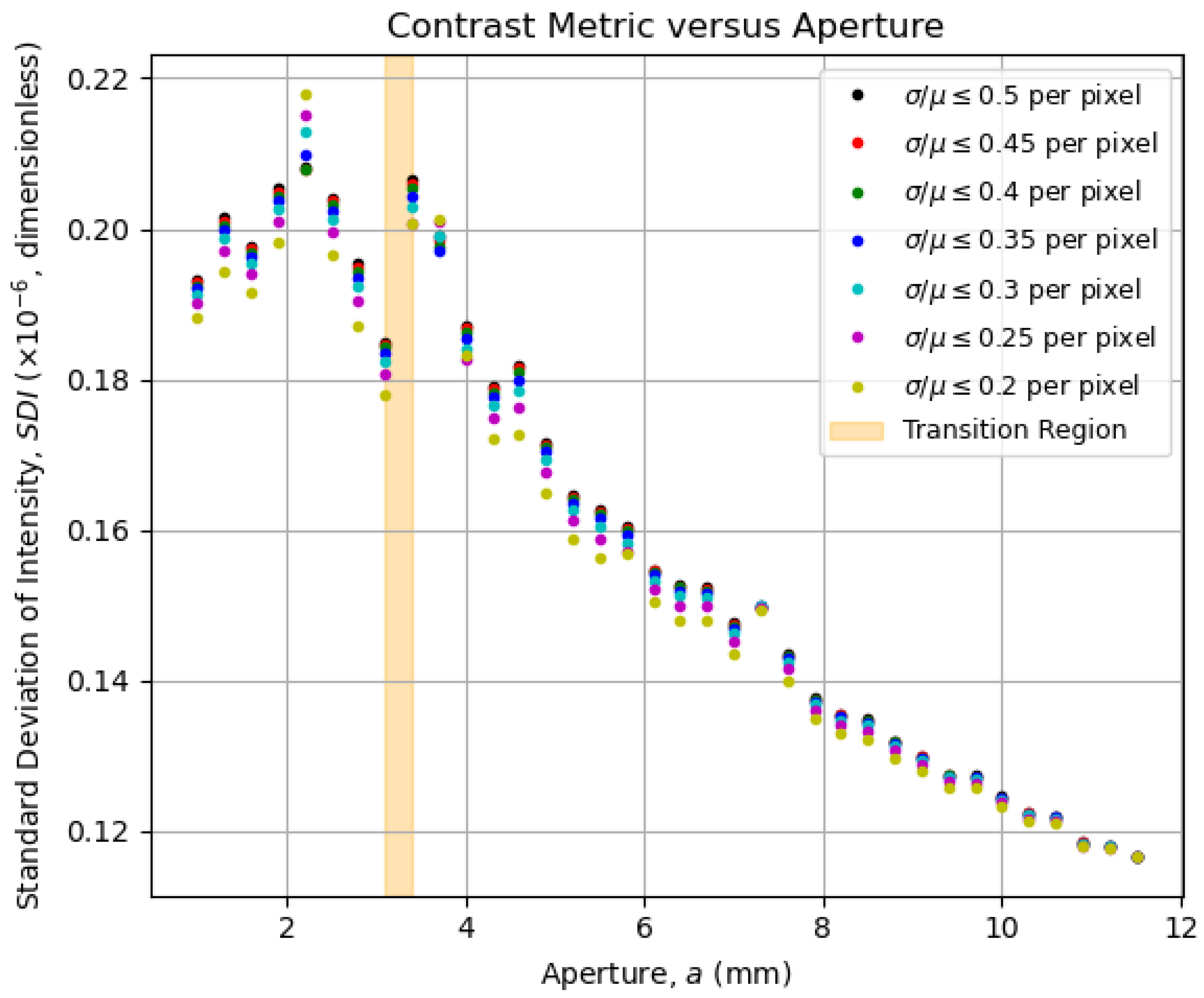
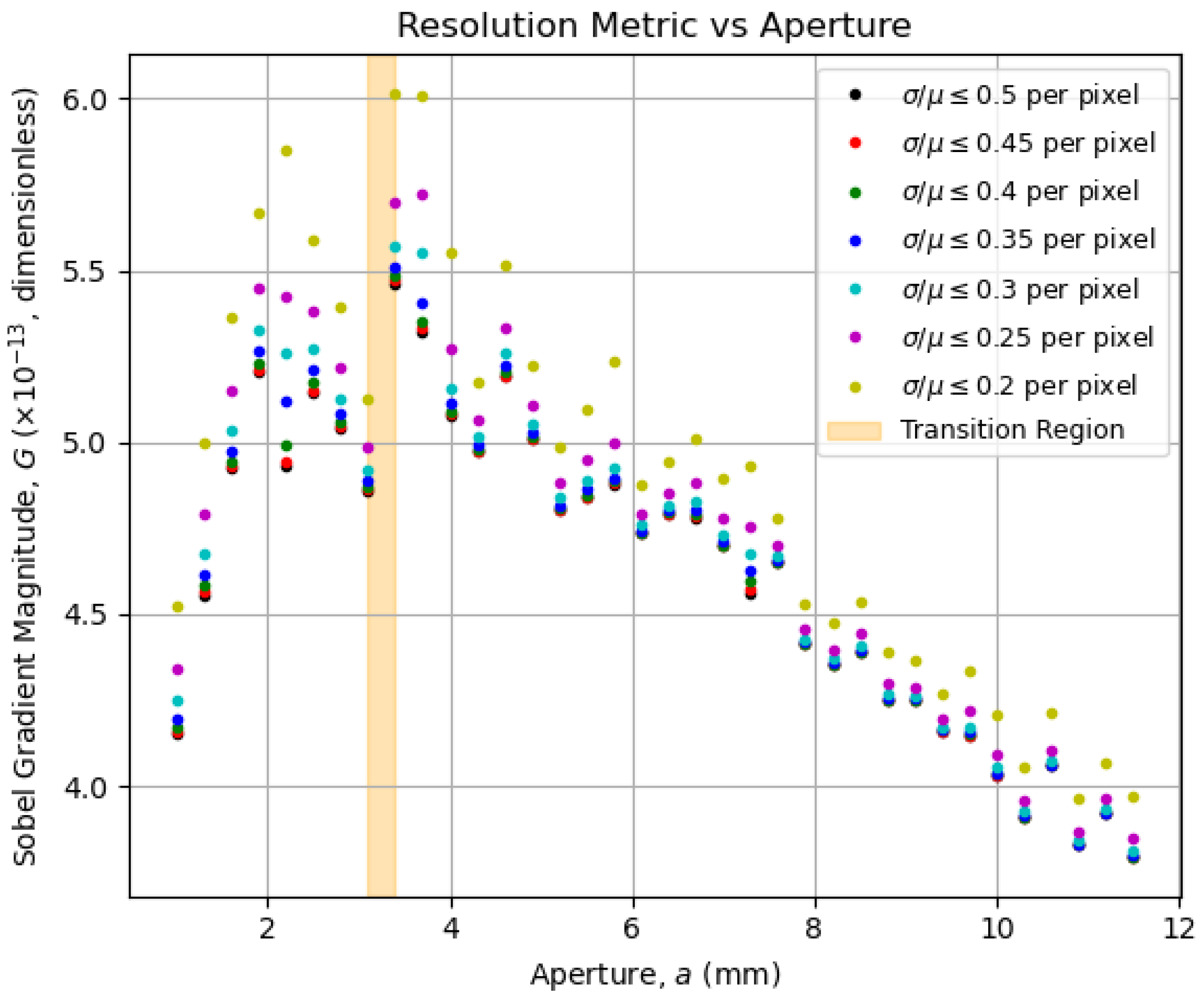
5.4. Contrast and Resolution Metrics
5.5. Physical Meaning of the Transition Region
5.6. Above the Transition Region
5.7. Below the Transition Region
6. Optimization Strategies
| Algorithm 1 Optimize Aperture for the Contrast–Resolution Trade-off. |
|
| Algorithm 2 Estimate of the Upper Aperture () to Reduce Scanning Time. |
|
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
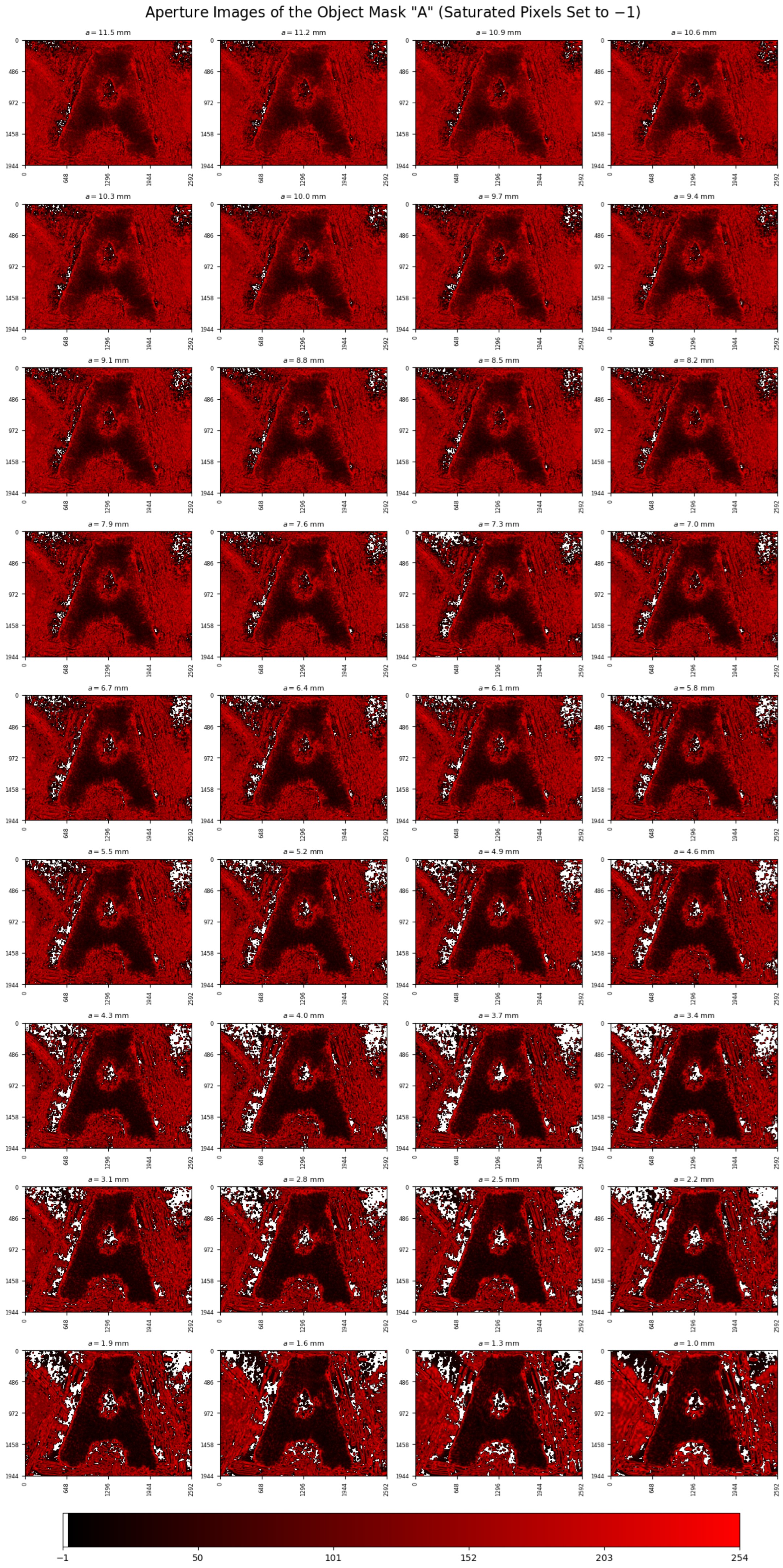
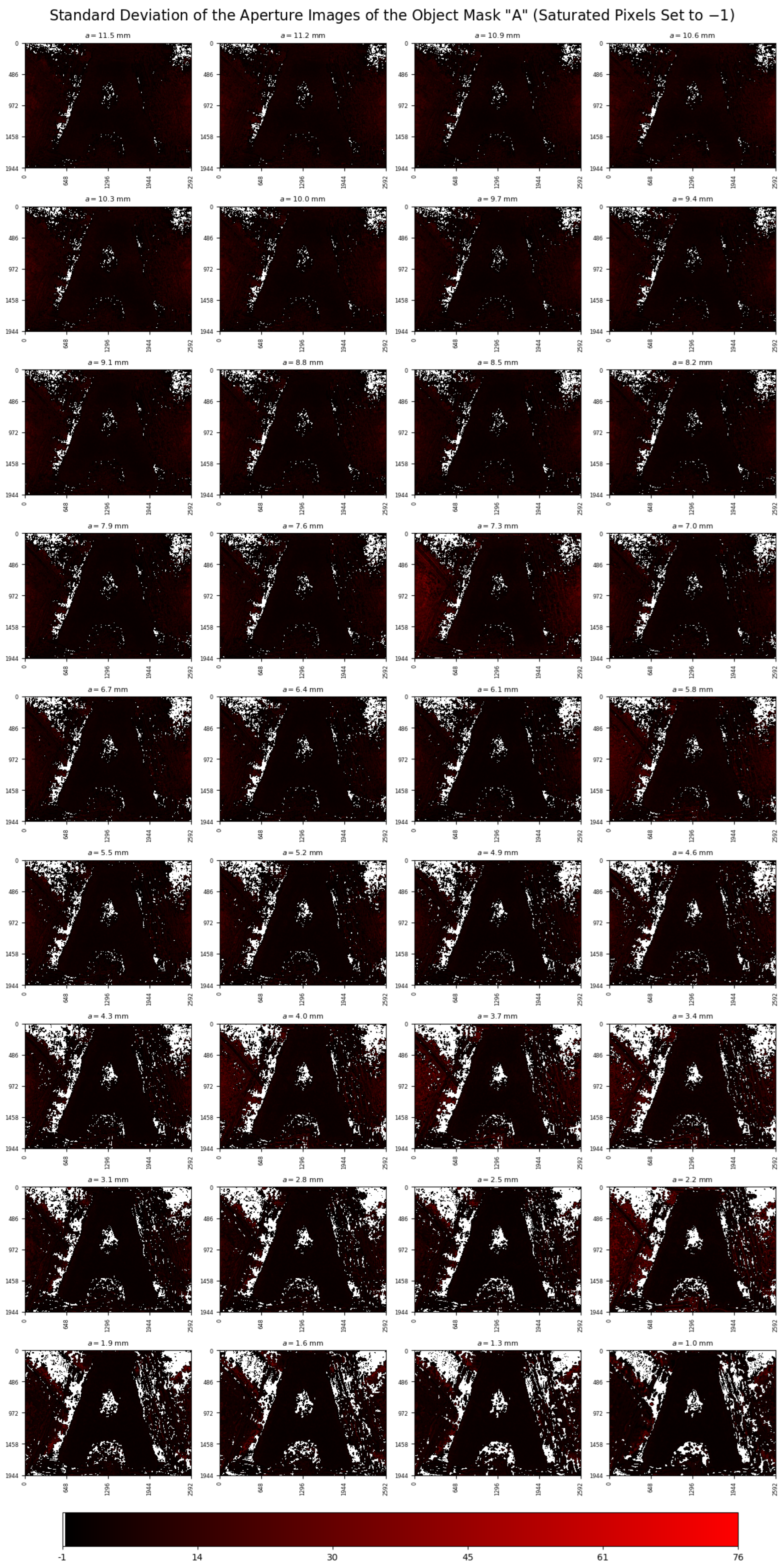
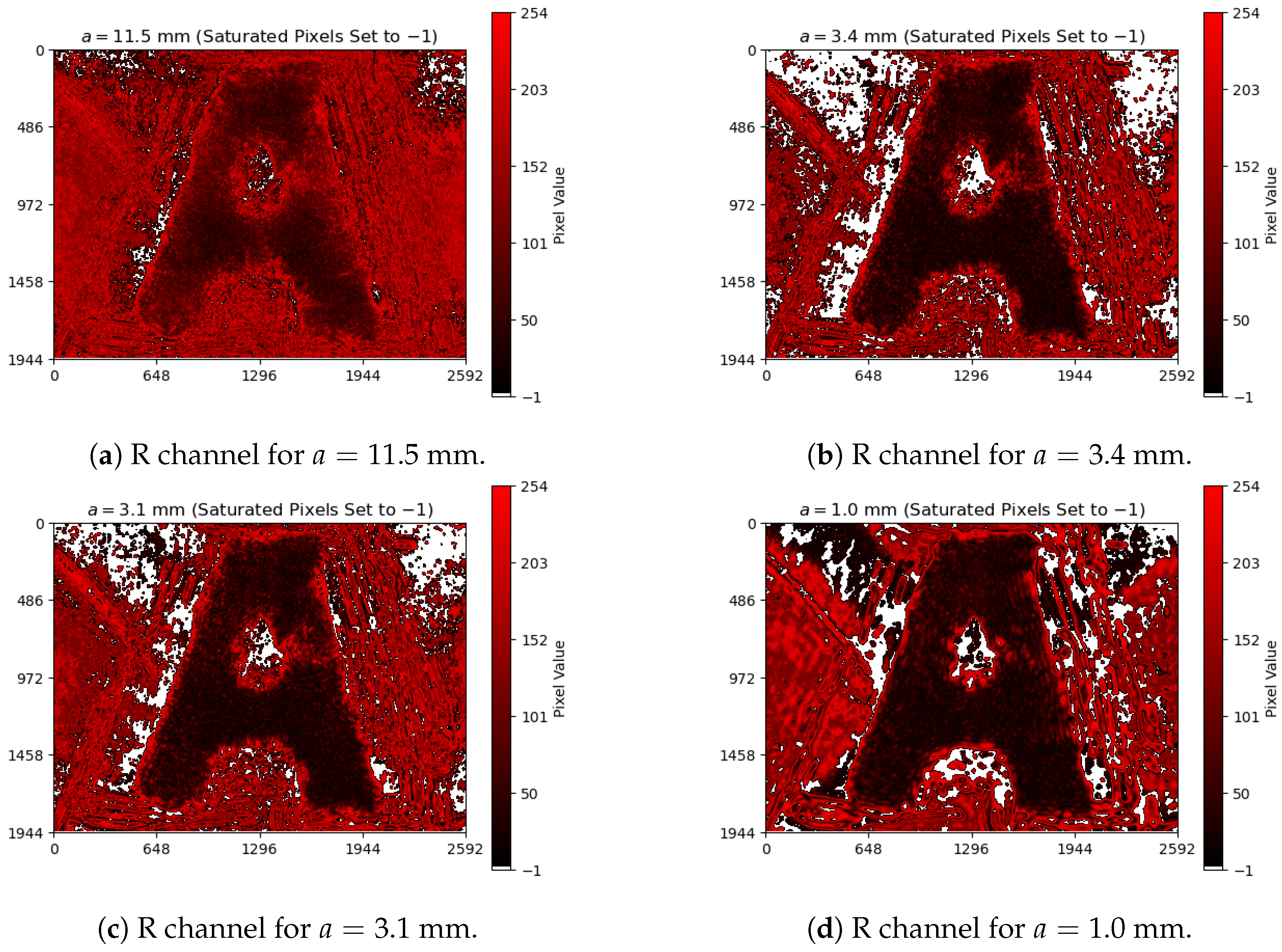
Appendix A. Aperture Colormap Images
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
References
- Prakash, K.; Baddeley, D.; Eggeling, C.; Fiolka, R.; Heintzmann, R.; Manley, S.; Radenovic, A.; Smith, C.; Shroff, H.; Schermelleh, L. Resolution in super-resolution microscopy—Definition, trade-offs and perspectives. Nat. Rev. Mol. Cell Biol. 2024, 25, 677–682. [Google Scholar] [CrossRef] [PubMed]
- Bertolotti, J.; Katz, O. Imaging in complex media. Nat. Phys. 2022, 18, 1008–1017. [Google Scholar] [CrossRef]
- Wang, D.; Sahoo, S.K.; Zhu, X.; Adamo, G.; Dang, C. Non-invasive super-resolution imaging through dynamic scattering media. Nat. Commun. 2021, 12, 3150. [Google Scholar] [CrossRef] [PubMed]
- Lepcha, D.C.; Goyal, B.; Dogra, A.; Sharma, K.P.; Gupta, D.N. A deep journey into image enhancement: A survey of current and emerging trends. Inf. Fusion 2023, 93, 36–76. [Google Scholar] [CrossRef]
- Pushkina, A.; Maltese, G.; Costa-Filho, J.; Patel, P.; Lvovsky, A. Superresolution linear optical imaging in the far field. Phys. Rev. Lett. 2021, 127, 253602. [Google Scholar] [CrossRef] [PubMed]
- Fu, T.; Zhang, J.; Sun, R.; Huang, Y.; Xu, W.; Yang, S.; Zhu, Z.; Chen, H. Optical neural networks: Progress and challenges. Light. Sci. Appl. 2024, 13, 263. [Google Scholar] [CrossRef] [PubMed]
- Reif, F. Fundamentals of Statistical and Thermal Physics; McGraw-Hill: New York, NY, USA, 1965. [Google Scholar]
- O’Neill, E.L.; Asakura, T. Optical image formation in terms of entropy transformations. J. Phys. Soc. Jpn. 1961, 16, 301–308. [Google Scholar]
- Kriete, A. Image quality. J. Comput.-Assist. Microsc. 1998, 10, 167–171. [Google Scholar] [CrossRef]
- Markvart, T. The thermodynamics of optical étendue. J. Opt. Pure Appl. Opt. 2007, 10, 015008. [Google Scholar] [CrossRef]
- Coles, P.J.; Berta, M.; Tomamichel, M.; Wehner, S. Entropic uncertainty relations and their applications. Rev. Mod. Phys. 2017, 89, 015002. [Google Scholar] [CrossRef]
- Stimper, V.; Bauer, S.; Ernstorfer, R.; Schölkopf, B.; Xian, R.P. Multidimensional contrast limited adaptive histogram equalization. IEEE Access 2019, 7, 165437–165447. [Google Scholar] [CrossRef]
- Goodman, J.W. Introduction to Fourier Optics; McGraw-Hill: New York, NY, USA, 1968. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miotti, M.; Magalhães, D.V. Entropy-Inspired Aperture Optimization in Fourier Optics. Entropy 2025, 27, 730. https://doi.org/10.3390/e27070730
Miotti M, Magalhães DV. Entropy-Inspired Aperture Optimization in Fourier Optics. Entropy. 2025; 27(7):730. https://doi.org/10.3390/e27070730
Chicago/Turabian StyleMiotti, Marcos, and Daniel Varela Magalhães. 2025. "Entropy-Inspired Aperture Optimization in Fourier Optics" Entropy 27, no. 7: 730. https://doi.org/10.3390/e27070730
APA StyleMiotti, M., & Magalhães, D. V. (2025). Entropy-Inspired Aperture Optimization in Fourier Optics. Entropy, 27(7), 730. https://doi.org/10.3390/e27070730