



Fault Diagnosis of Planetary Gearbox Based on Hierarchical Refined Composite Multiscale Fuzzy Entropy and Optimized LSSVM

Abstract
1. Introduction
2. Hierarchical Refined Composite Multiscale Fuzzy Entropy
2.1. Multiscale Fuzzy Entropy
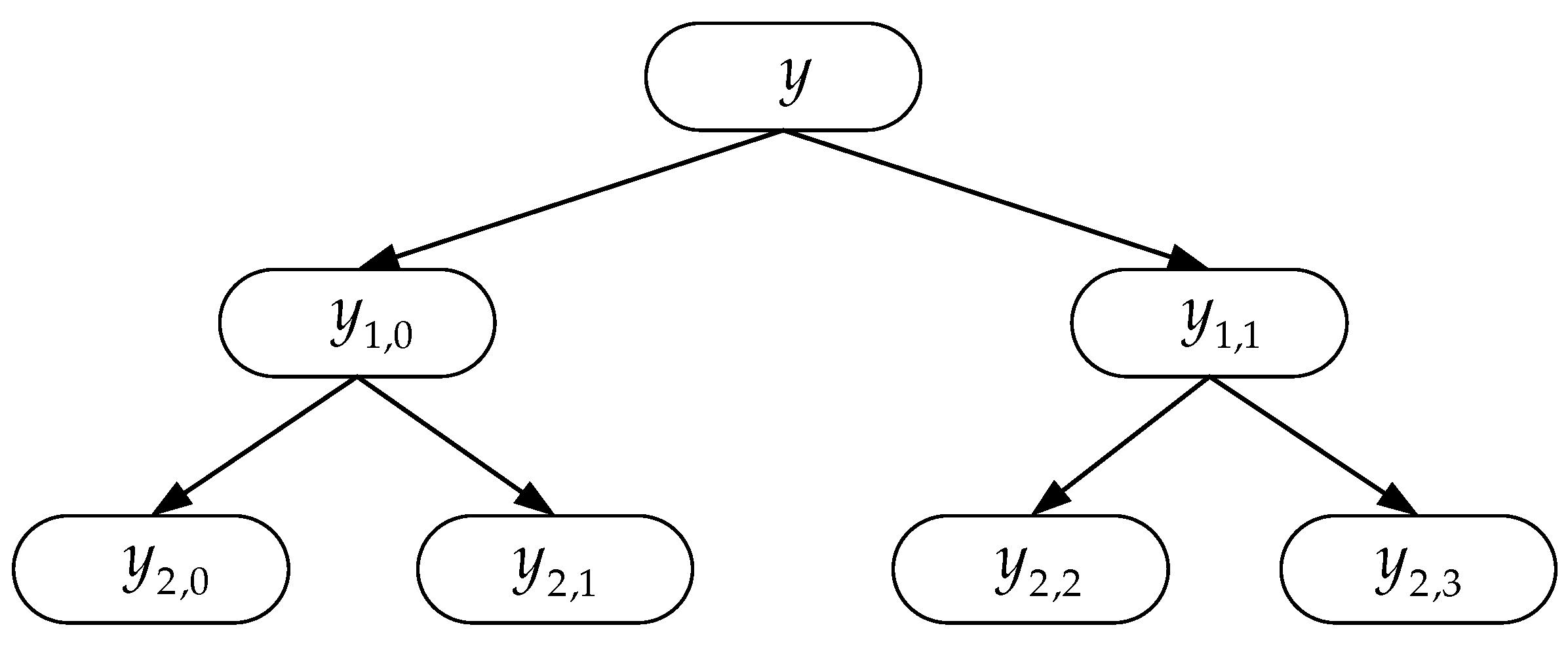
2.2. Hierarchical Multiscale Fuzzy Entropy
2.3. Hierarchical Refined Composite Multiscale Fuzzy Entropy
3. The Proposed Fault Diagnosis Method
3.1. LSSVM
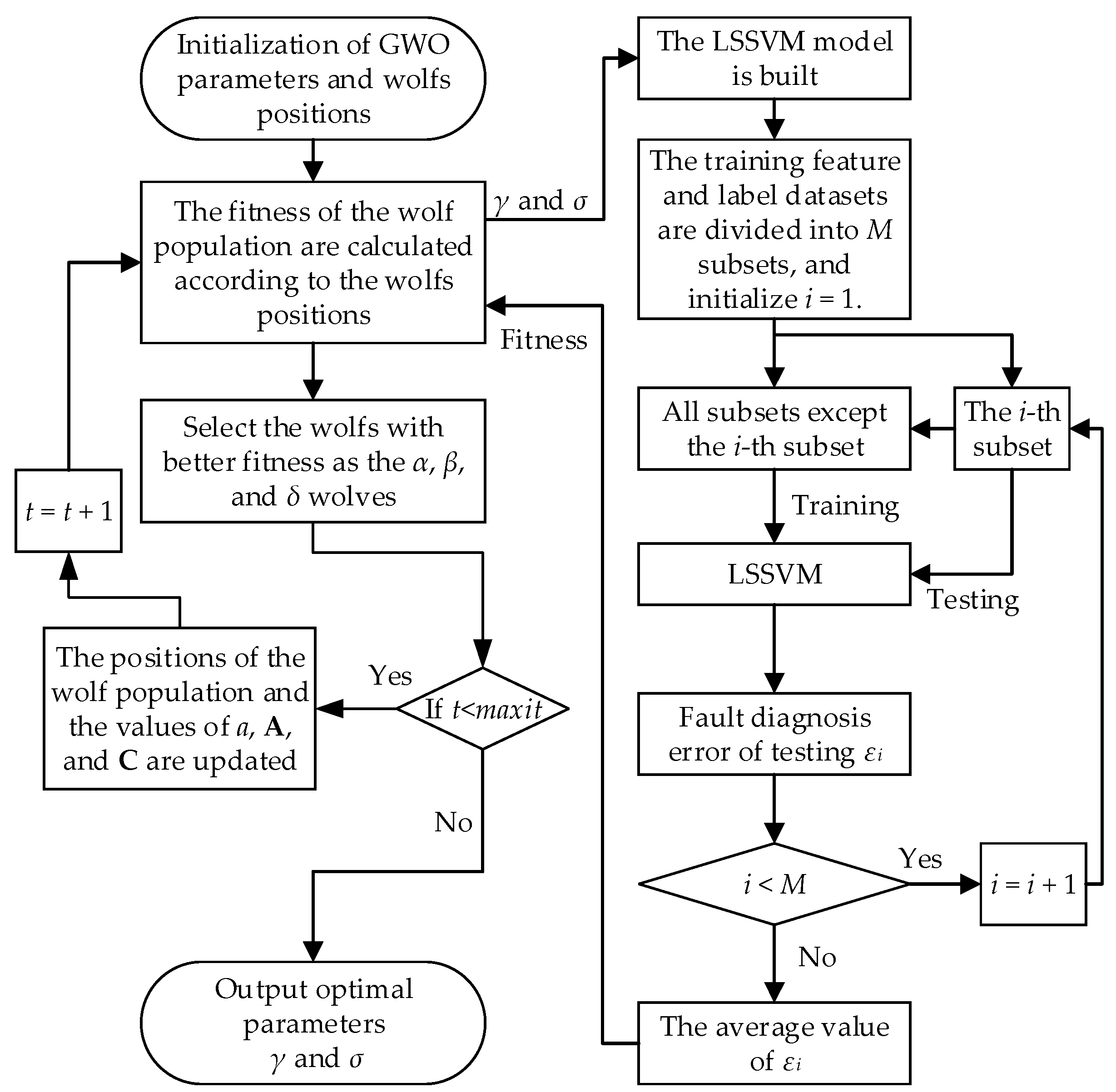
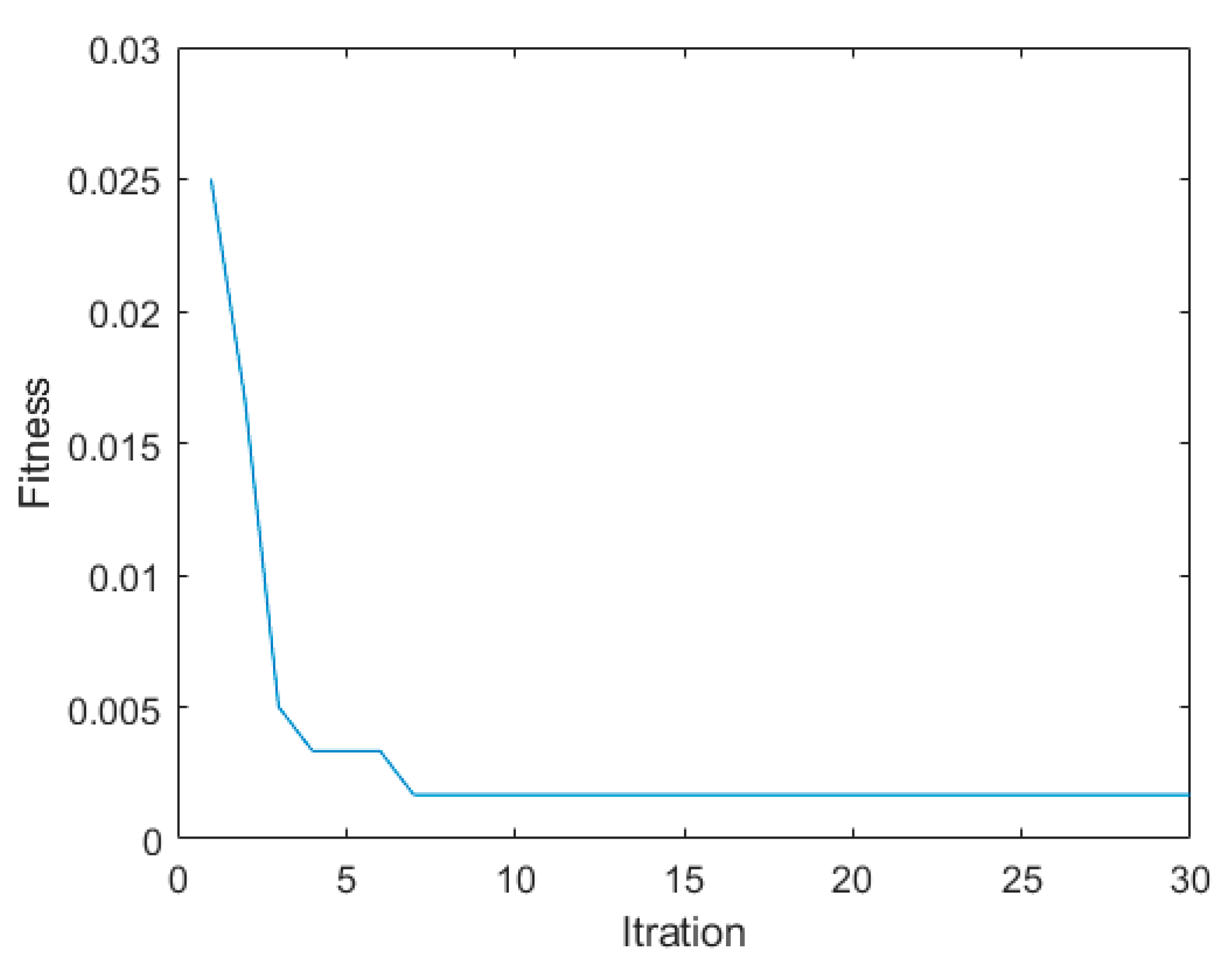
3.2. GWO-LSSVM
3.3. The Proposed Fault Diagnosis Framework
- (1)
- The proposed HRCMFE is employed to extract fault features from vibration signals of planetary gearboxes, which can effectively discriminate between high-frequency and low-frequency signal characteristics. Meanwhile, the refined composite computational framework significantly enhances the computational stability of entropy values.
- (2)
- GWO is employed to optimize the hyperparameters of LSSVM, and the fitness function of GWO is based on cross-validation. The proposed GWO-LSSVM can significantly improve the classification accuracy and generalization ability of LSSVM.
- (3)
- The proposed method is verified by the vibration signal of planetary gearbox under different states.
4. Simulation Study
5. Experiment Analysis
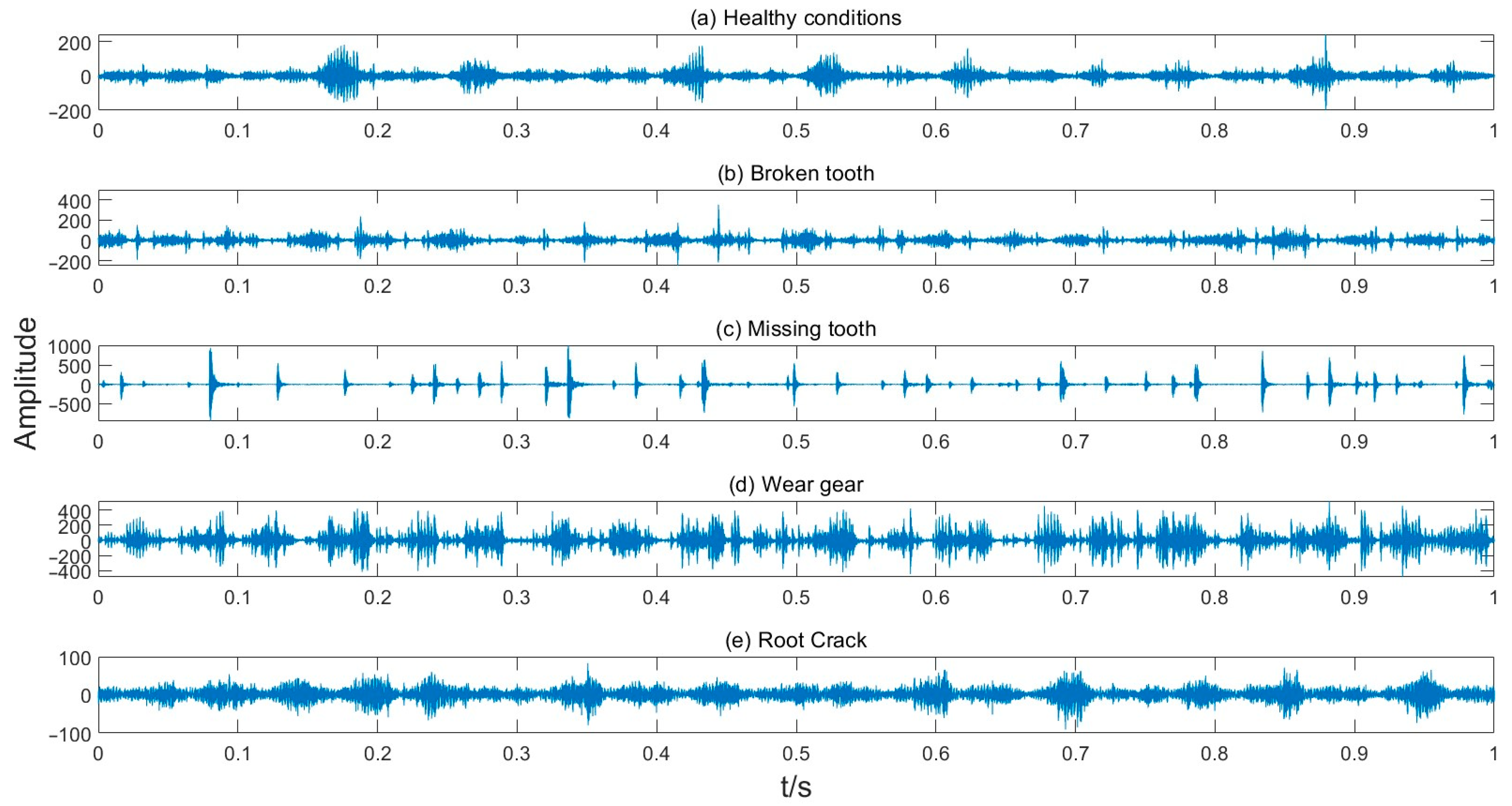
5.1. Experiments and Data Descriptions
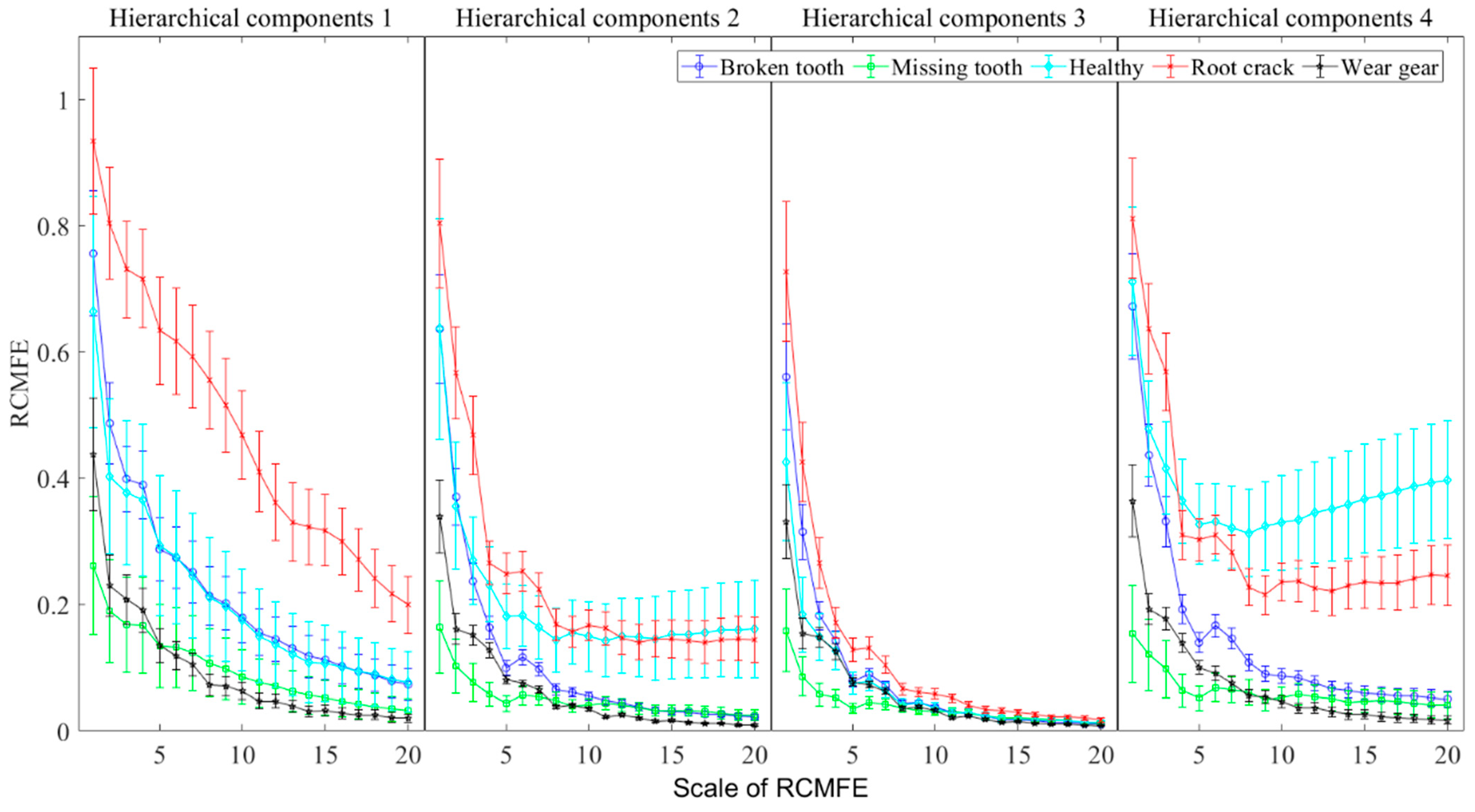
5.2. Feature Extraction
5.3. Fault Diagnosis by GWO-LSSVM
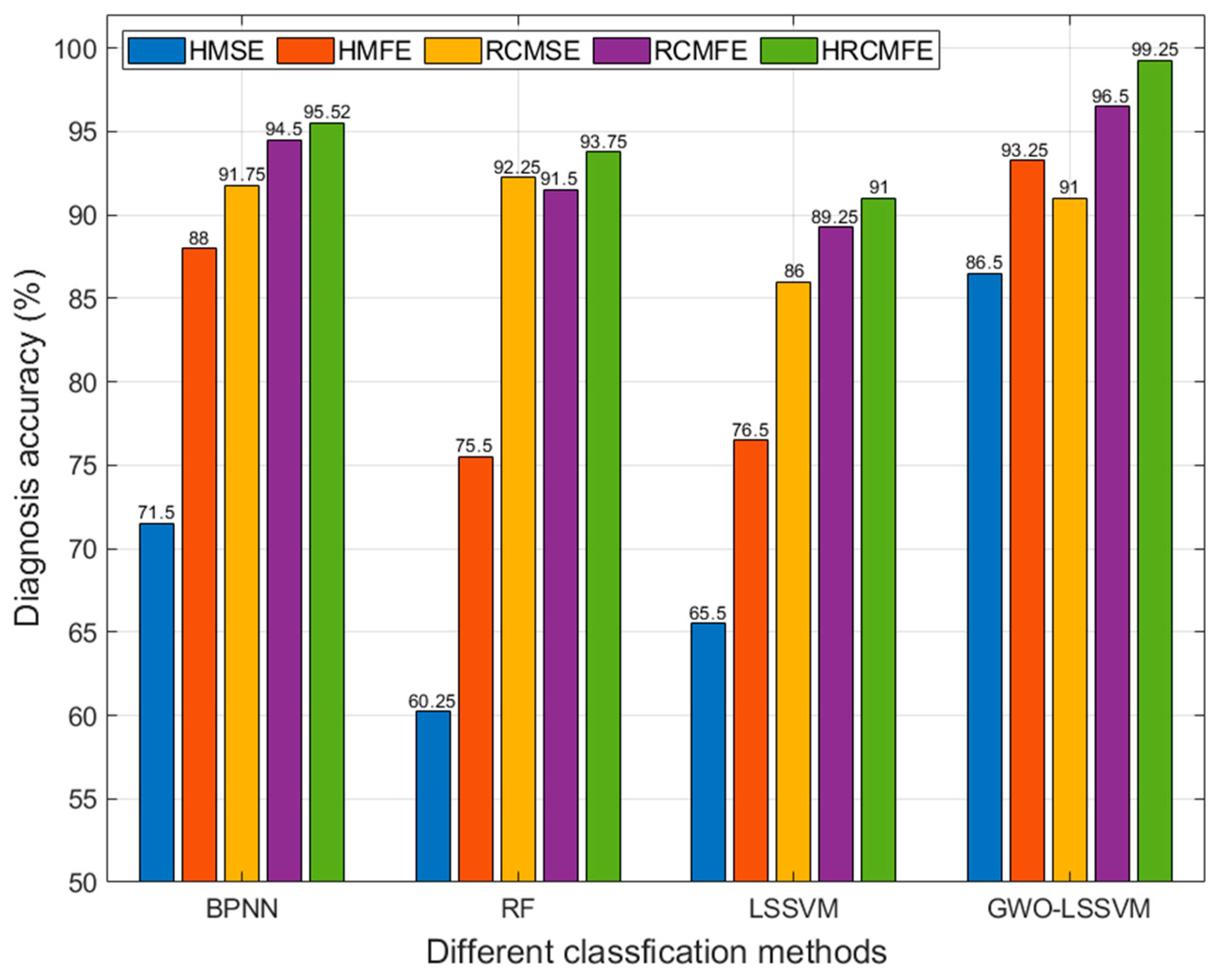
5.4. Comparison with Other Methods
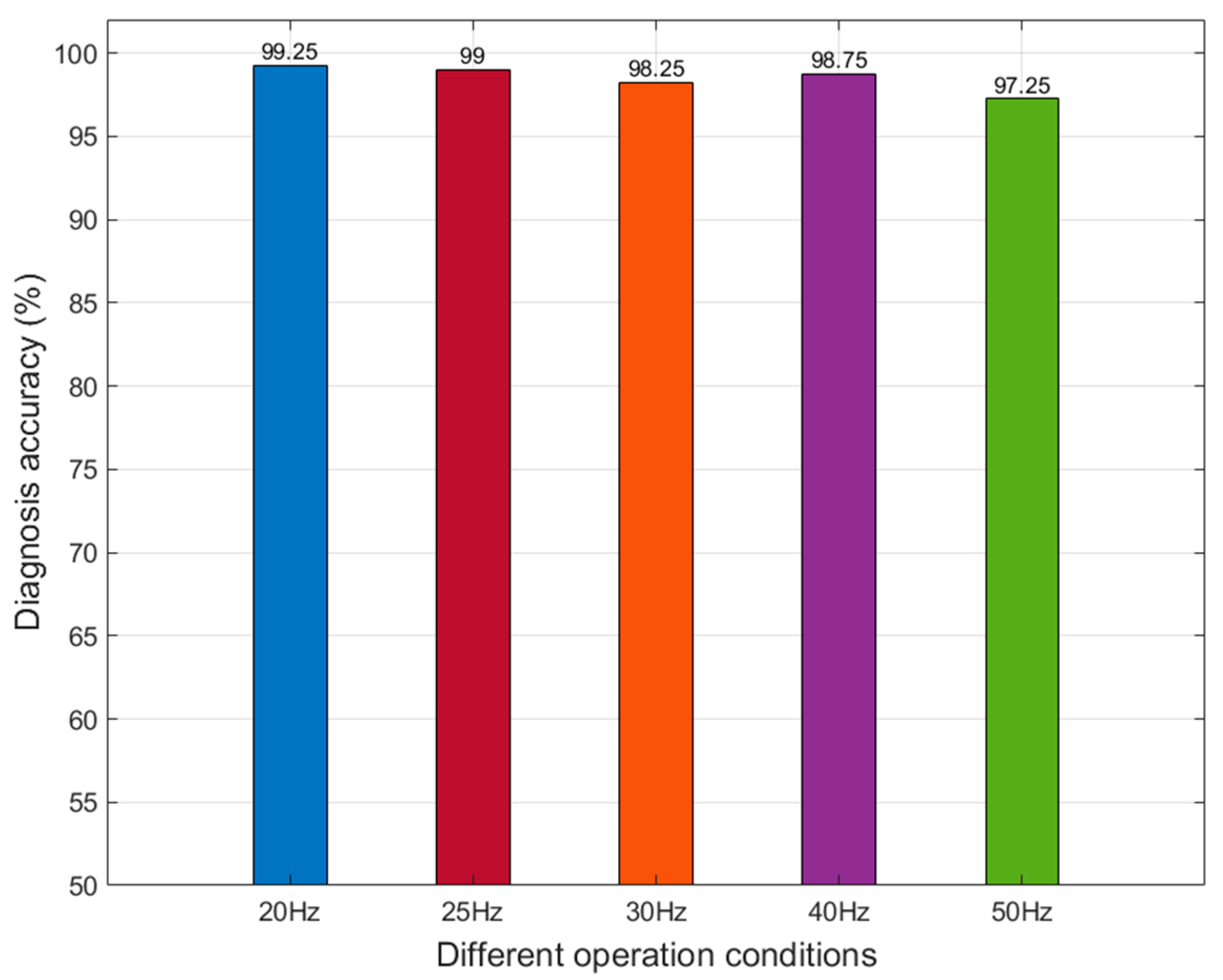
5.5. Fault Diagnosis for Different Operation Conditons
6. Conclusions
- (a)
- Simulation results demonstrate that HRCMFE exhibits better computational stability than HMFE and HMSE when processing white noise signals.
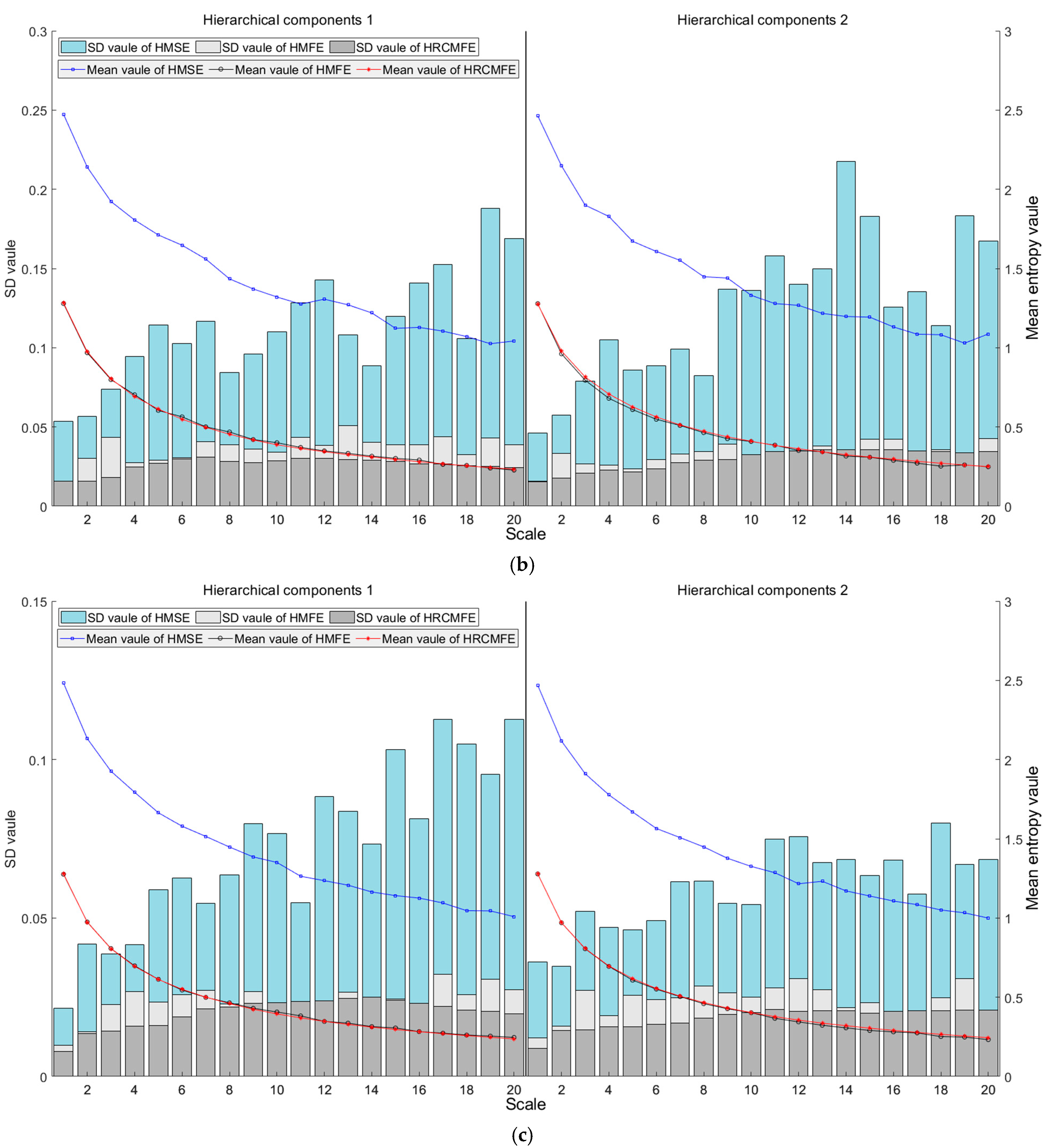
- (b)
- In comprehensive experimental validation, the HRCMFE-based fault feature extraction method for planetary gearboxes demonstrates superior effectiveness compared with methods based on HMSE, HMFE, RCMSE, and RCMFE.
- (c)
- The GWO-optimized LSSVM applied to planetary gearbox fault diagnosis shows statistically significant improvements in classification accuracy.
- (d)
- The method proposed in this paper exhibits good diagnostic efficiency under different work conditions. However, further investigation into its resilience under highly variable operational scenarios is warranted.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, D.; Cui, L.; Cheng, W. Fault diagnosis of wind turbines under nonstationary conditions based on a novel tacho-less generalized demodulation. Renew. Energy 2023, 206, 645–657. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, N.; Li, Y.; Cheng, Z.; Shen, G. Dynamic modeling and analysis of planetary gear system for tooth fault diagnosis. Mech. Syst. Signal Process. 2024, 207, 110946. [Google Scholar] [CrossRef]
- Xue, S.; Howard, I. Torsional vibration signal analysis as a diagnostic tool for planetary gear fault detection. Mech. Syst. Signal Process. 2018, 100, 706–728. [Google Scholar] [CrossRef]
- Feng, Z.; Zuo, M.J. Vibration signal models for fault diagnosis of planetary gearboxes. J. Sound Vib. 2012, 331, 4919–4939. [Google Scholar] [CrossRef]
- Chen, X.; Feng, Z. Time-frequency analysis of torsional vibration signals in resonance region for planetary gearbox fault diagnosis under variable speed conditions. IEEE Access 2017, 5, 21918–21926. [Google Scholar] [CrossRef]
- Feng, Z.; Zuo, M.J. Fault diagnosis of planetary gearboxes via torsional vibration signal analysis. Mech. Syst. Signal Process. 2013, 36, 401–421. [Google Scholar] [CrossRef]
- Feng, Z.; Gao, A.; Li, K.; Ma, H. Planetary gearbox fault diagnosis via rotary encoder signal analysis. Mech. Syst. Signal Process. 2021, 149, 107325. [Google Scholar] [CrossRef]
- Yin, C.; Li, Y.; Wang, Y.; Dong, Y. Physics-guided degradation trajectory modeling for remaining useful life prediction of rolling bearings. Mech. Syst. Signal Process. 2025, 224, 112192. [Google Scholar] [CrossRef]
- Lei, Y.; Han, D.; Lin, J.; He, Z. Planetary gearbox fault diagnosis using an adaptive stochastic resonance method. Mech. Syst. Signal Process. 2013, 38, 113–124. [Google Scholar] [CrossRef]
- Sun, R.B.; Yang, Z.B.; Luo, W.; Qiao, B.J.; Chen, X.F. Weighted sparse representation based on failure dynamics simulation for planetary gearbox fault diagnosis. Meas. Sci. Technol. 2019, 30, 045008. [Google Scholar] [CrossRef]
- Chen, B.; Cheng, Y.; Allen, P.; Wang, S.; Gu, F.; Zhang, W.; Ball, A.D. A product envelope spectrum generated from spectral correlation/coherence for railway axle-box bearing fault diagnosis. Mech. Syst. Signal Process. 2025, 225, 112262. [Google Scholar] [CrossRef]
- Chen, B.; Smith, W.A.; Cheng, Y.; Gu, F.; Chu, F.; Zhang, W.; Ball, A.D. Probability distributions and typical sparsity measures of Hilbert transform-based generalized envelopes and their application to machine condition monitoring. Mech. Syst. Signal Process. 2025, 224, 112026. [Google Scholar] [CrossRef]
- Liu, D.; Cui, L.; Cheng, W. A review on deep learning in planetary gearbox health state recognition: Methods, applications, and dataset publication. Meas. Sci. Technol. 2023, 35, 012002. [Google Scholar] [CrossRef]
- Lu, L.; He, Y.; Ruan, Y.; Yuan, W. Wind turbine planetary gearbox condition monitoring method based on wireless sensor and deep learning approach. IEEE Trans. Instrum. Meas. 2020, 70, 3503016. [Google Scholar] [CrossRef]
- Cheng, G.; Chen, X.; Li, H.; Li, P.; Liu, H. Study on planetary gear fault diagnosis based on entropy feature fusion of ensemble empirical mode decomposition. Measurement 2016, 91, 140–154. [Google Scholar] [CrossRef]
- Wang, Y.; Fan, Z.; Liu, H.; Gao, X. Planetary gearbox fault diagnosis based on ICEEMD-time-frequency information entropy and VPMCD. Appl. Sci. 2020, 10, 6376. [Google Scholar] [CrossRef]
- Feng, K.; Wang, K.; Ni, Q.; Zuo, M.J.; Wei, D. A phase angle based diagnostic scheme to planetary gear faults diagnostics under non-stationary operational conditions. J. Sound Vib. 2017, 408, 190–209. [Google Scholar] [CrossRef]
- Kuai, M.; Cheng, G.; Pang, Y.; Li, Y. Research of planetary gear fault diagnosis based on permutation entropy of CEEMDAN and ANFIS. Sensors. 2018, 18, 782. [Google Scholar] [CrossRef]
- Gu, C.; Qiao, X.Y.; Li, H.; Jin, Y. Misfire fault diagnosis method for diesel engine based on MEMD and dispersion entropy. Shock Vib. 2021, 2021, 9213697. [Google Scholar] [CrossRef]
- Chen, X.; Cheng, G.; Li, H.; Zhang, M. Diagnosing planetary gear faults using the fuzzy entropy of LMD and ANFIS. J. Mech. Sci. Technol. 2016, 30, 2453–2462. [Google Scholar] [CrossRef]
- Zhuang, D.; Liu, H.; Zheng, H.; Xu, L.; Gu, Z.; Cheng, G.; Qiu, J. The IBA-ISMO method for rolling bearing fault diagnosis based on VMD-sample entropy. Sensors 2023, 23, 991. [Google Scholar] [CrossRef]
- Wang, S.; Li, Y.; Si, S.; Noman, K. Enhanced hierarchical symbolic sample entropy: Efficient tool for fault diagnosis of rotating machinery. Struct. Health Monit. 2023, 22, 1927–1940. [Google Scholar] [CrossRef]
- Rajabi, S.; Azari, M.S.; Santini, S.; Flammini, F. Fault diagnosis in industrial rotating equipment based on permutation entropy, signal processing and multi-output neuro-fuzzy classifier. Expert Syst. Appl. 2022, 206, 117754. [Google Scholar] [CrossRef]
- Zhou, S.; Qian, S.; Chang, W.; Xiao, Y.; Cheng, Y. A novel bearing multi-fault diagnosis approach based on weighted permutation entropy and an improved SVM ensemble classifier. Sensors 2018, 18, 1934. [Google Scholar] [CrossRef]
- Rostaghi, M.; Azami, H. Dispersion entropy: A measure for time-series analysis. IEEE Signal Process. Lett. 2016, 23, 610–614. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yang, Y. A rolling bearing fault diagnosis approach based on LCD and fuzzy entropy. Mech. Mach. Theory 2013, 70, 441–453. [Google Scholar] [CrossRef]
- Humeau-Heurtier, A. The multiscale entropy algorithm and its variants: A review. Entropy 2015, 17, 3110–3123. [Google Scholar] [CrossRef]
- Li, Y.; Feng, K.; Liang, X.; Zuo, M.J. A fault diagnosis method for planetary gearboxes under non-stationary working conditions using improved Vold-Kalman filter and multi-scale sample entropy. J. Sound Vib. 2019, 439, 271–286. [Google Scholar] [CrossRef]
- Li, H.; Huang, J.; Yang, X.; Luo, J.; Zhang, L.; Pang, Y. Fault diagnosis for rotating machinery using multiscale permutation entropy and convolutional neural networks. Entropy 2020, 22, 851. [Google Scholar] [CrossRef]
- Lebreton, C.; Kbidi, F.; Graillet, A.; Jegado, T.; Alicalapa, F.; Benne, M.; Damour, C. PV system failures diagnosis based on multiscale dispersion entropy. Entropy 2022, 24, 1311. [Google Scholar] [CrossRef]
- Jin, Z.; Xiao, Y.; He, D.; Wei, Z.; Sun, Y.; Yang, W. Fault diagnosis of bearing based on refined piecewise composite multivariate multiscale fuzzy entropy. Digit. Signal Process. 2023, 133, 103884. [Google Scholar] [CrossRef]
- Jiang, Y.; Peng, C.K.; Xu, Y. Hierarchical entropy analysis for biological signals. J. Comput. Appl. Math. 2011, 236, 728–742. [Google Scholar] [CrossRef]
- Rostaghi, M.; Khatibi, M.M.; Ashory, M.R.; Azami, H. Refined composite multiscale fuzzy dispersion entropy and its applications to bearing fault diagnosis. Entropy 2023, 25, 1494. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Wang, Q.; Zhang, Y. Rolling bearing fault diagnosis based on CEEMDAN and refined composite multiscale fuzzy entropy. IEEE Trans. Instrum. Meas. 2021, 70, 3514908. [Google Scholar] [CrossRef]
- Li, Y.; Gao, Q.; Li, P.; Liu, J.; Zhu, Y. Fault diagnosis of rolling bearing using a refined composite multiscale weighted permutation entropy. J. Mech. Sci. Technol. 2021, 35, 1893–1907. [Google Scholar] [CrossRef]
- Strączkiewicz, M.; Barszcz, T. Application of artificial neural network for damage detection in planetary gearbox of wind turbine. Shock Vib. 2016, 2016, 4086324. [Google Scholar] [CrossRef]
- Gbashi, S.M.; Adedeji, P.A.; Olatunji, O.O.; Madushele, N. Optimal feature selection for a weighted k-nearest neighbors for compound fault classification in wind turbine gearbox. Results Eng. 2025, 25, 103791. [Google Scholar] [CrossRef]
- Abdul, Z.K.; Al-Talabani, A.K. Highly accurate gear fault diagnosis based on support vector machine. J. Vib. Eng. Technol. 2023, 11, 3565–3577. [Google Scholar] [CrossRef]
- Ruan, D.; Chen, X.; Gühmann, C.; Yan, J. Improvement of generative adversarial network and its application in bearing fault diagnosis: A review. Lubricants 2023, 11, 74. [Google Scholar] [CrossRef]
- Hosseinzadeh, J.; Masoodzadeh, F.; Roshandel, E. Fault detection and classification in smart grids using augmented K-NN algorithm. SN Appl. Sci. 2019, 1, 1627. [Google Scholar] [CrossRef]
- Uddin, S.; Islam, M.R.; Khan, S.A.; Kim, J.; Kim, J.M.; Sohn, S.M.; Choi, B.K. Distance and Density Similarity Based Enhanced k-NN Classifier for Improving Fault Diagnosis Performance of Bearings. Shock Vib. 2016, 2016, 3843192. [Google Scholar] [CrossRef]
- Shi, Q.; Zhang, H. Fault diagnosis of an autonomous vehicle with an improved SVM algorithm subject to unbalanced datasets. IEEE Trans. Ind. Electron. 2020, 68, 6248–6256. [Google Scholar] [CrossRef]
- Han, T.; Zhang, L.; Yin, Z.; Tan, A.C. Rolling bearing fault diagnosis with combined convolutional neural networks and support vector machine. Measurement 2021, 177, 109022. [Google Scholar] [CrossRef]
- Chauhan, V.K.; Dahiya, K.; Sharma, A. Problem formulations and solvers in linear SVM: A review. Artif. Intell. Rev. 2019, 52, 803–855. [Google Scholar] [CrossRef]
- Samui, P.; Kothari, D.P. Utilization of a least square support vector machine (LSSVM) for slope stability analysis. Sci. Iran. 2011, 18, 53–58. [Google Scholar] [CrossRef]
- Guo, X.C.; Yang, J.H.; Wu, C.G.; Wang, C.Y.; Liang, Y.C. A novel LS-SVMs hyper-parameter selection based on particle swarm optimization. Neurocomputing 2008, 71, 3211–3215. [Google Scholar] [CrossRef]
- Deng, W.; Yao, R.; Zhao, H.; Yang, X.; Li, G. A novel intelligent diagnosis method using optimal LS-SVM with improved PSO algorithm. Soft Comput. 2019, 23, 2445–2462. [Google Scholar] [CrossRef]
- Li, J.; Chen, W.; Han, K.; Wang, Q. Fault diagnosis of rolling bearing based on GA-VMD and improved WOA-LSSVM. IEEE Access 2020, 8, 166753–166767. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Ahn, J.; Chung, H.C.; Jeon, Y. Trace ratio optimization for high-dimensional multi-class discrimination. J. Comput. Graph. Stat. 2021, 30, 192–203. [Google Scholar] [CrossRef]
- Li, Z.; Nie, F.; Chang, X.; Yang, Y. Beyond trace ratio: Weighted harmonic mean of trace ratios for multiclass discriminant analysis. IEEE Trans. Knowl. Data Eng. 2017, 29, 2100–2110. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Special Parameters | Common Parameters |
|---|---|---|
| HMSE | / | Number of hierarchies is 1 Scale factor is 20 Scalar embedding value is 2 Scalar time lag value is 1 Scalar threshold value is 0.15 |
| HMFE | Fuzzy power is 2 | |
| HRCMFE | Fuzzy power is 2 |
| Operation State | Data Length | Number of Training Sample | Number of Testing Sample | Operation Label |
|---|---|---|---|---|
| Healthy | 1024 | 120 | 80 | 1 |
| Broken tooth | 120 | 80 | 2 | |
| Missing tooth | 120 | 80 | 3 | |
| Root crack | 120 | 80 | 4 | |
| Wear gear | 120 | 80 | 5 |
| Feature Extraction Method | HRCMFE | HMFE | HMSE |
|---|---|---|---|
| Trace ratio | 1.222 | 1.136 | 1.127 |
| Classification Methods | Parameters |
|---|---|
| BNPP | The number of hidden layer neuron is 10, learning rate is 0.01 maximum iterations is 1000, target training error is 10−6 |
| RF | The number of trees is 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, X.; Wang, X. Fault Diagnosis of Planetary Gearbox Based on Hierarchical Refined Composite Multiscale Fuzzy Entropy and Optimized LSSVM. Entropy 2025, 27, 512. https://doi.org/10.3390/e27050512
Xia X, Wang X. Fault Diagnosis of Planetary Gearbox Based on Hierarchical Refined Composite Multiscale Fuzzy Entropy and Optimized LSSVM. Entropy. 2025; 27(5):512. https://doi.org/10.3390/e27050512
Chicago/Turabian StyleXia, Xin, and Xiaolu Wang. 2025. "Fault Diagnosis of Planetary Gearbox Based on Hierarchical Refined Composite Multiscale Fuzzy Entropy and Optimized LSSVM" Entropy 27, no. 5: 512. https://doi.org/10.3390/e27050512
APA StyleXia, X., & Wang, X. (2025). Fault Diagnosis of Planetary Gearbox Based on Hierarchical Refined Composite Multiscale Fuzzy Entropy and Optimized LSSVM. Entropy, 27(5), 512. https://doi.org/10.3390/e27050512