
Using the Intrinsic Geometry of Binodal Curves to Simplify the Computation of Ternary Liquid–Liquid Phase Diagrams


Abstract
1. Introduction
2. Phase Separation: From Thermodynamics to Geometry
2.1. Phase Coexistence in Multicomponent Mixtures at Thermodynamic Equilibrium
2.2. Phase Coexistence Conditions in Partial Molar Variables
2.3. Ternary Case: Phase Equilibrium Condition and Bitangent Planes Geometry
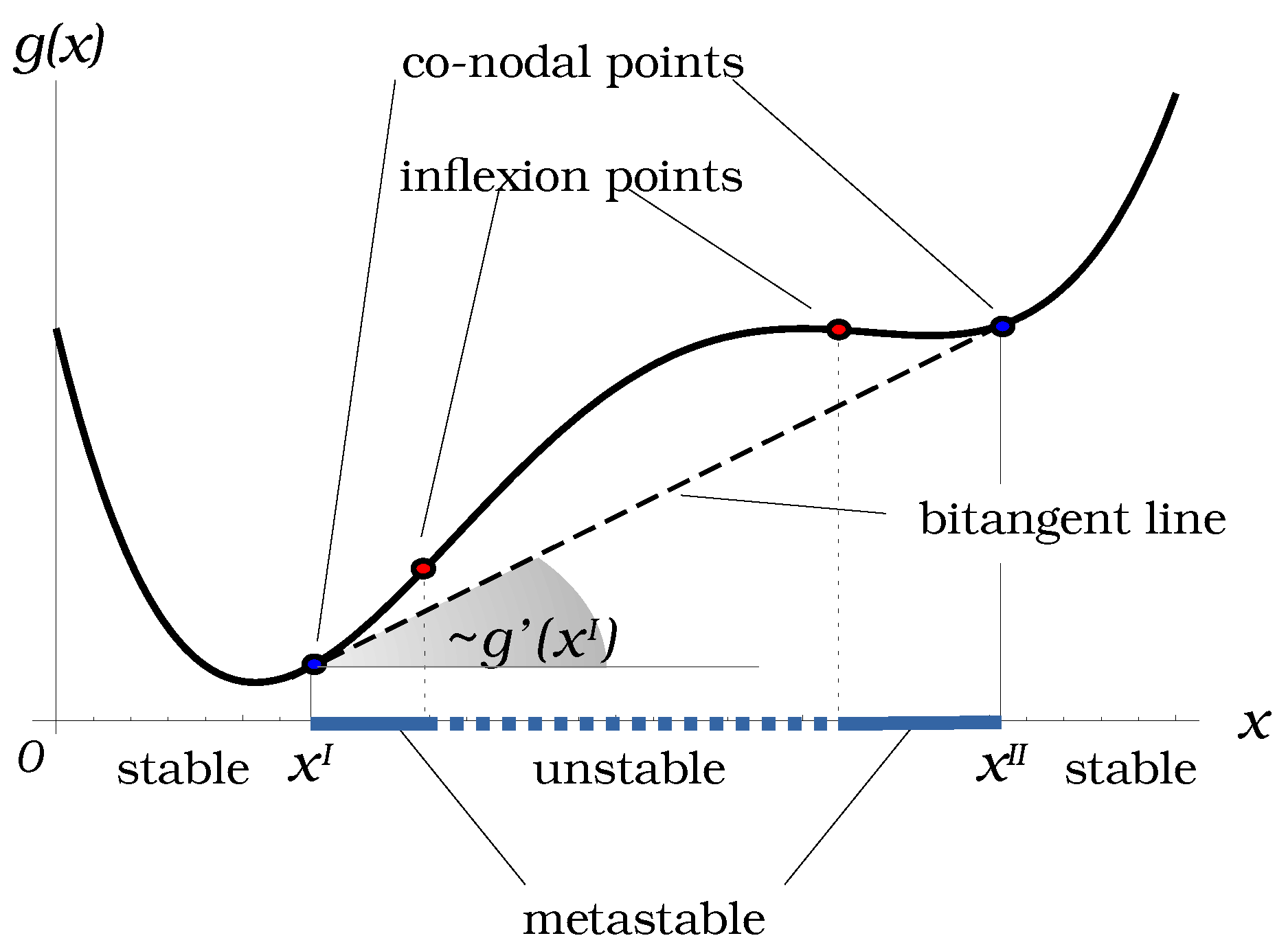
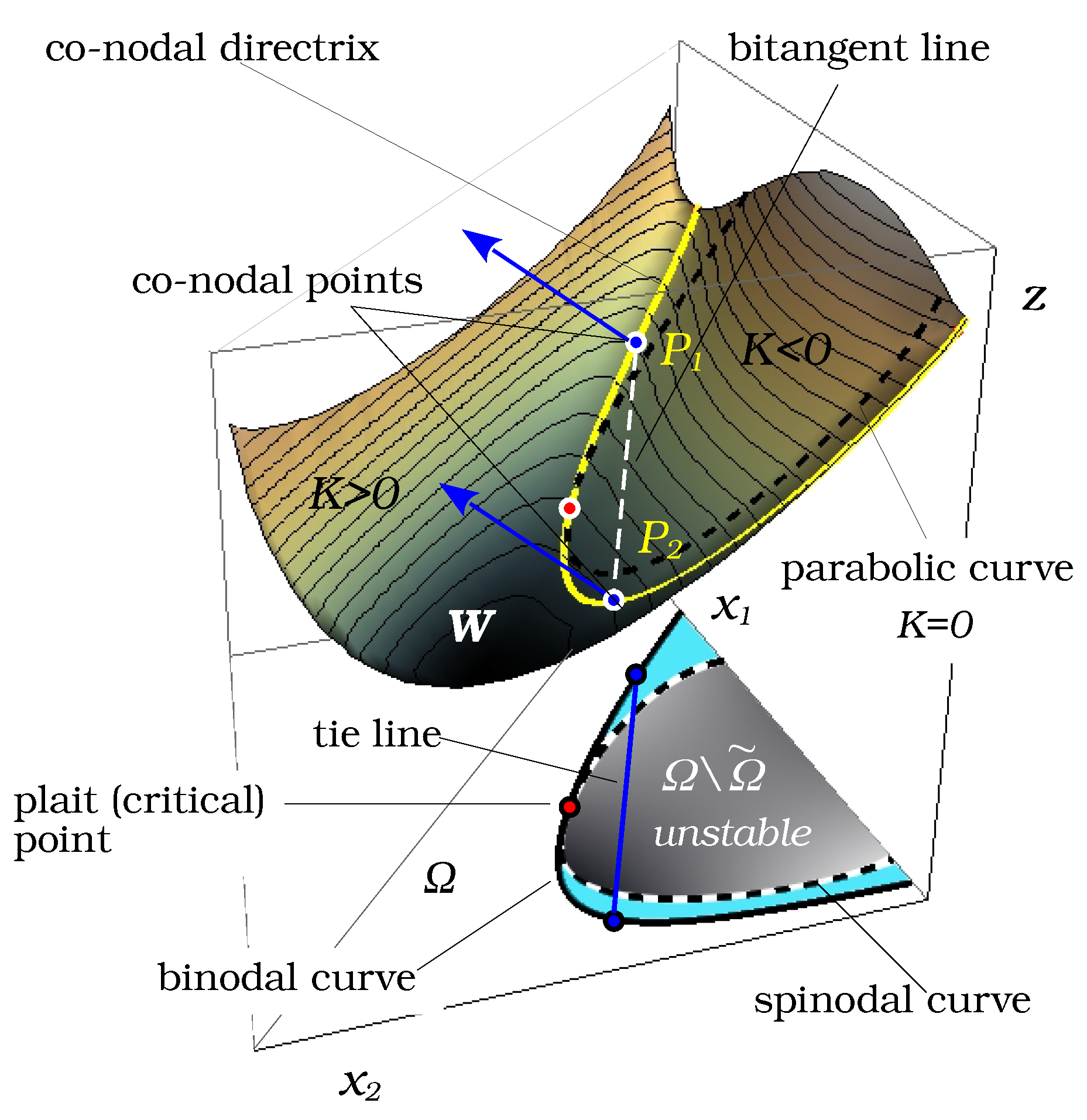
2.4. Differential Geometry of the Gibbs Energy Surface
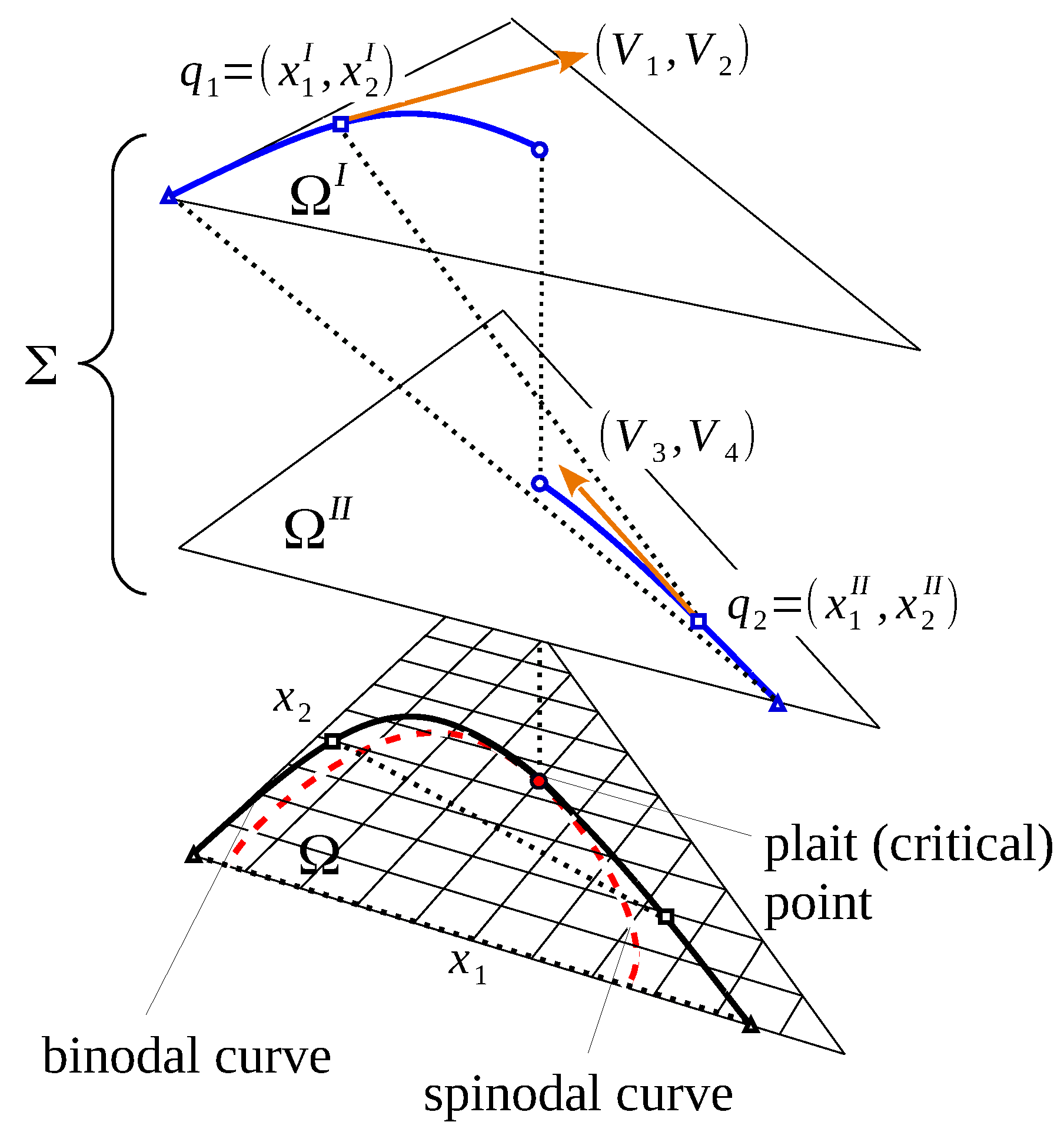
3. Four-Dimensional Geometry of the Binodal Curve
Numerical Computation of Binodal and Spinodal Curves
4. Inverse Problem and Case Studies
- Type 0 or “island” type: The diagram is characterized by a closed heterogeneous domain inside the composition triangle, while all three binary pairs are miscible. The systems of this type exhibit two plait points.
- Type I: One pair of components exhibits a miscibility gap on the border of the composition triangle. This type of diagram possesses one plait point where both liquid phases have the same composition. This is the most common type of phase diagrams (75% according to [21]).
- Type II: This type is characterized by the presence of two partial miscibility gaps on the borders of the composition triangle. Such diagrams do not have plait points. They represent about 20% of known solutions ([21]).
4.1. The Flory–Huggins Model Equation
4.2. Parameter Estimation Procedure and Case Studies

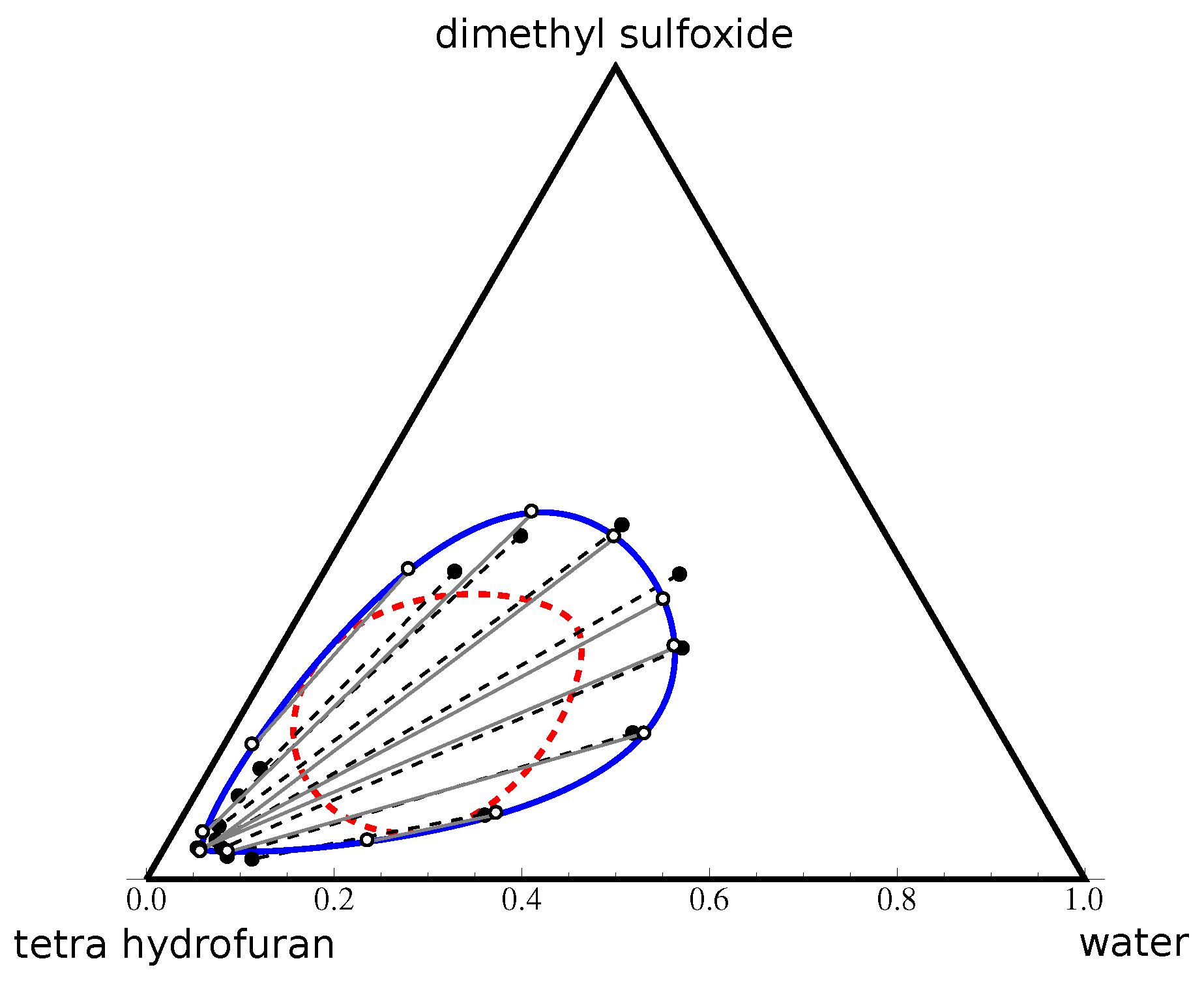
4.2.1. Type 0 Diagram: Water–DMSO–THF
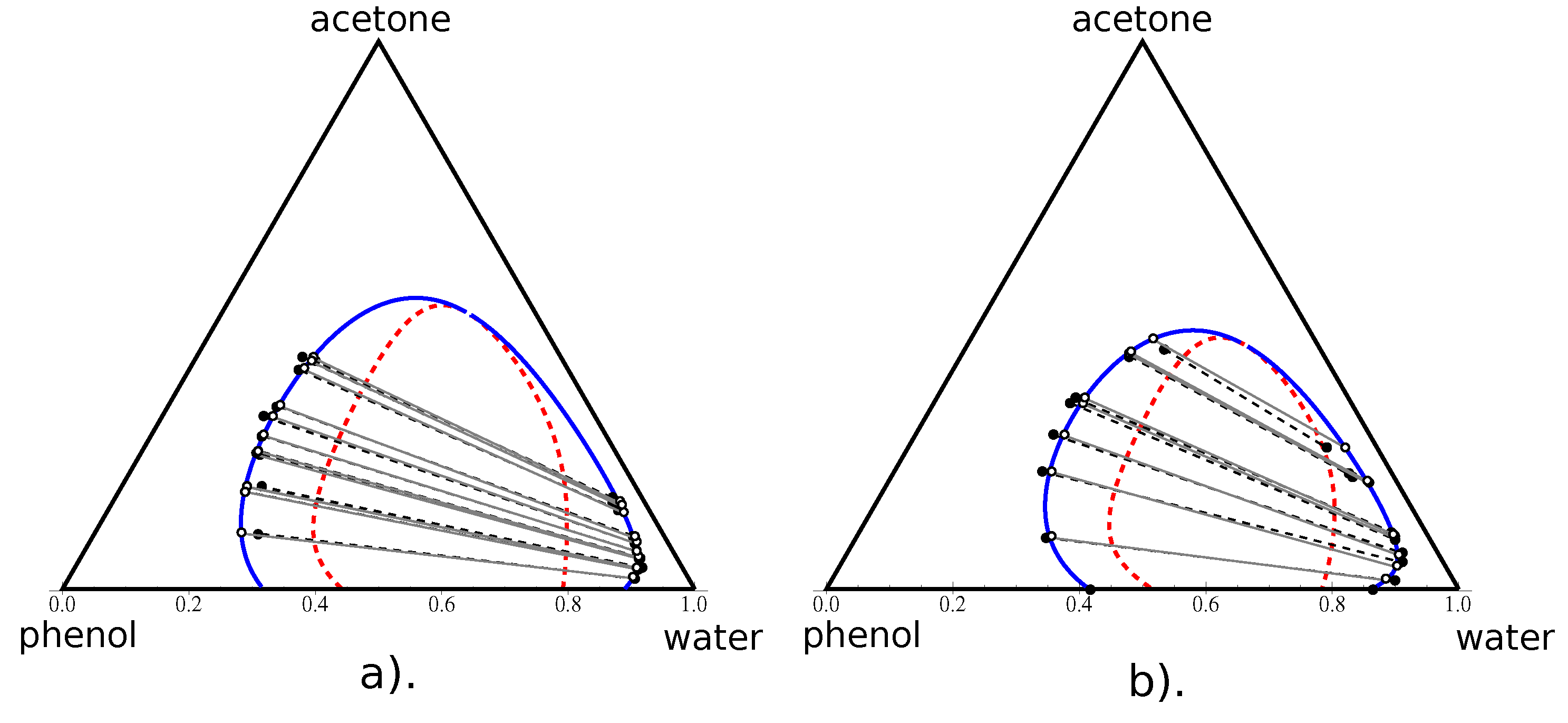
4.2.2. Type I Diagram: Water–Phenol–Acetone

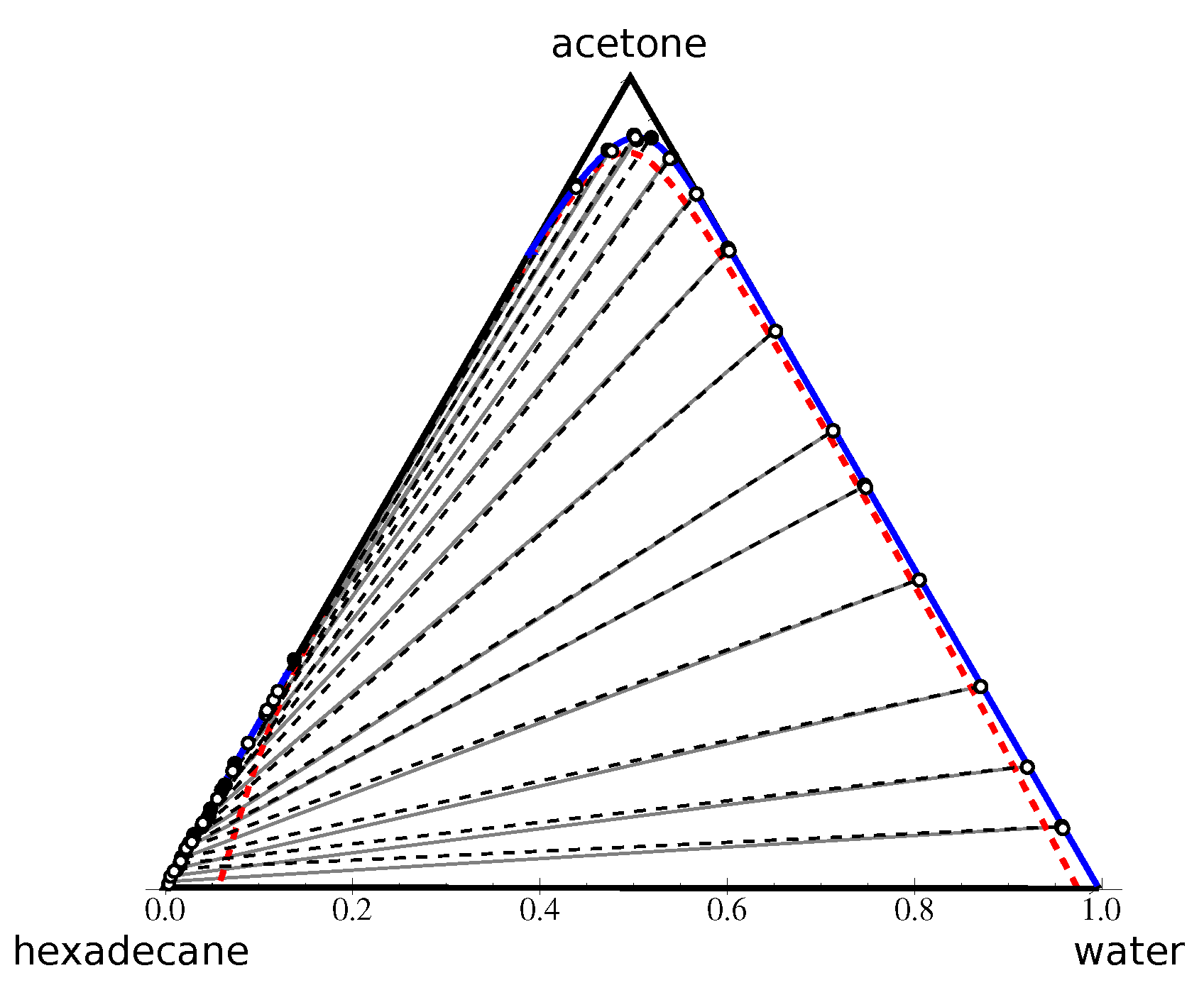
4.2.3. Type II Diagram: Water–Acetone–Hexadecane
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Phase Coexistence Conditions in Terms of Molar Fractions
Appendix B. The Flory–Huggins Model Computational Formulae
Appendix B.1. Phase Coexistence Conditions Associated with Flory–Huggins Model and Linearity
Appendix B.2. Detection of the Parameters of the Fh Model from the Miscibility Gap Limits
Appendix C. Water–Acetone–Hexadecane Experimental Data

| Phase I | Phase II | ||||
|---|---|---|---|---|---|
| Water | Acetone | Hexadecane | Water | Acetone | Hexadecane |
| 0.005026 | 0.088051 | 0.906923 | 0.1153287 | 0.88 | 0.0046713 |
| 0.002956 | 0.121763 | 0.875281 | 0.07389669 | 0.9115 | 0.014603313 |
| 0.004319 | 0.127764 | 0.867917 | 0.05061999 | 0.919 | 0.030380015 |
| 0.000775 | 0.153273 | 0.845952 | 0.02604692 | 0.9075 | 0.06645308 |
| 0.000313 | 0.284572 | 0.715115 | 0.01003813 | 0.865 | 0.124961871 |
| 0.002187 | 0.023547 | 0.974265 | 0.93897 | 0.06102 | 0.000000001 |
| 0.002148 | 0.029435 | 0.968417 | 0.87777 | 0.12223 | 0.000000001 |
| 0.001949 | 0.036801 | 0.96125 | 0.793004 | 0.20699 | 0.000000001 |
| 0.000308 | 0.048658 | 0.951034 | 0.67413 | 0.3259 | 0.000000001 |
| 0.003093 | 0.054403 | 0.942503 | 0.56358 | 0.4364 | 0.000000001 |
| 0.000276 | 0.065321 | 0.934403 | 0.49548 | 0.50452 | 0.000000001 |
| 0.005298 | 0.074969 | 0.919733 | 0.3655 | 0.63446 | 0.000000001 |
| 0.003066 | 0.082343 | 0.914591 | 0.2541 | 0.74585 | 0.000000001 |
| 0.002307 | 0.097121 | 0.900573 | 0.1747 | 0.82524 | 0.000000001 |
| Water | Acetone | Hexadecane |
|---|---|---|
| 0.3503 | 0.6496 | 8.98 × 10−5 |
| 0.1989 | 0.7996 | 0.0015 |
| 0.1519 | 0.846 | 0.002 |
| 0.115 | 0.882 | 0.0033 |
| 0.10056065 | 0.89269389 | 0.00674546 |
| 0.06122825 | 0.91649876 | 0.02227299 |
| 0.04112357 | 0.9178071 | 0.04106932 |
| 0.02740997 | 0.90841079 | 0.06417925 |
| 0.01445356 | 0.88430202 | 0.10124442 |
| 0.0039 | 0.8456 | 0.1504 |
| 0.002 | 0.799 | 0.199 |
| 0 | 0.783 | 0.217 |
| 0 | 0.264 | 0.736 |
| 0.0005 | 0.1975 | 0.8021 |
| 0.0007 | 0.1589 | 0.8404 |
| 0.00092 | 0.1122 | 0.8869 |
| 0.00065 | 0.0603 | 0.9391 |
References
- Koningsveld, R.; Stockmayer, W.H.; Nies, E. Polymer Phase Diagrams; Oxford Univ. Press: Oxford, UK, 2001. [Google Scholar]
- Ferrari, J.C.; Nagatani, G.; Corazza, F.C.; Oliveira, J.V.; Corazza, M.L. Application of stochastic algorithms for parameter estimation in the liquid–liquid phase equilibrium modeling. Fluid Phase Equilib. 2009, 280, 110–119. [Google Scholar] [CrossRef]
- Vatani, M.; Asghari, M.; Vakili-nejhaad, G. Application of Genetic Algorithm to Parameter Estimation in Liquid-liquid Phase Equilibrium Modeling. J. Math. Comp. Sci. 2012, 5, 60–66. [Google Scholar] [CrossRef]
- Fernandez-Vargas, J.A.; Bonilla-Petriciolet, A.; Segovia-Hernandez, J.G. An improved ant colony optimization method and its application for the thermodynamic modeling of phase equilibrium. Fluid Phase Equilib. 2013, 353, 121–131. [Google Scholar] [CrossRef]
- Zhang, H.; Bonilla-Petriciolet, A.; Rangaiah, G.P. A Review on Global Optimization Methods for Phase Equilibrium Modeling and Calculations. Open Thermodyn. J. 2011, 5, 71–92. [Google Scholar] [CrossRef]
- Aliena, F.W.; Smolders, C.A. Calculation of Liquid-Liquid Phase Separation in a Ternary System of a Polymer in a Mixture of a Solvent and a Nonsolvent. Macromolecules 1982, 15, 1491–1497. [Google Scholar]
- Michelsen, M.L. The isothermal flash problem. Part I. Stability. Fluid Phase Equilibria 1982, 9, 1–19. [Google Scholar]
- Binous, H.; Bellagi, A. Calculation of ternary liquid-liquid equilibrium data using arc-length continuation. Wiley Eng. Rep. 2021, 3, e12296. [Google Scholar]
- Bausa, J.; Marquardt, W. Quick and reliable phase stability test in VLLE flash calculations by homotopy continuation. Comp. Chem. Eng. 2000, 24, 2447–2456. [Google Scholar] [CrossRef]
- Levelt, S. How Fluids Unmix; Royal Netherlands Academy of Arts and Sciences: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Arnold, V.I. Singulatrities of Caustics and Wave Fronts; Kluwer: Baltimore, MD, USA, 1990. [Google Scholar]
- Varchenko, A.N. Evolutions of convex hulls and phase transitions in thermodynamics. J. Math. Sci. 1990, 52, 3305–3325. [Google Scholar] [CrossRef]
- Aicardi, F.; Valentin, P.; Ferrand, E. On the classification of generic phenomena in one-parameter families of binary mixtures. Phys. Chem. Chem. Phys. 2002, 4, 884–895. [Google Scholar] [CrossRef]
- Gaite, J.A. Phase transitions as catastrophes: The tricritical point. Phys. Rev. A 1990, 41, 5320–5324. [Google Scholar] [CrossRef] [PubMed]
- Gaite, J.; Margalef-Roig, J.; Miret-Atrtes, S. Analysis of a three-component model phase diagram by catastrophe theory. Phys. Rev. B 1998, 57, 13527. [Google Scholar] [CrossRef]
- Treybal, R.E. Liquid Extraction, 2nd ed.; McGraw-Hill: New-York, NY, USA, 1963. [Google Scholar]
- Do Carmo, M. Differential Geometry of Curves and Surfaces, 2nd ed.; Courier Dover Publications: Mineola, NY, USA, 2017. [Google Scholar]
- Uribe-Vargas, R. A projective invariant for swallowtails and godrons, and global theorems on the flecnodal curve. Mosc. Math. J. 2006, 6, 731–768. [Google Scholar] [CrossRef]
- Tompa, H. Polymer Solutions; Butterworths: London, UK, 1956. [Google Scholar]
- Cots, O.; Shcherbakova, N.; Gergaud, J. SMITH: Differential homotopy and automatic differentiation for computing thermodynamic diagrams of complex mixtures. Comput. Aided Chem. Eng. 2021, 50, 1081–1086. [Google Scholar]
- Gmehling, J.; Kolbe, B.; Kleiber, M.; Rarey, J. Chemical Thermodynamics for Process Simulation, 2nd ed.; Willey-VCH Verlag: Weinheim, Germany, 2019. [Google Scholar]
- Wolfram Mathematica: The World’s Definitive System for Modern Technical Computing. Available online: https://www.wolfram.com/mathematica/ (accessed on 1 January 2020).
- Sørensen, J.M.; Arlt, W. Liquid-Liquid Equilibrium Data Collection, in der Reihe: Dechema Chemistry Data Series; DECHEMA: Frankfurt, Germany, 1980; Volume V. [Google Scholar]
- Zuber, A.; Raimundo, R.; Mafra, M.R.; Filho, L.C.; Oliveira, J.V.; Corazza, M.L. Thermodynamic modeling of ternary liquid-liquid systems with forming immiscibility islands. Braz. Arch. Biol. Technol. 2013, 56, 1034–1042. [Google Scholar] [CrossRef]
- Olaya, M.M.; Reyes-Labarta, J.A.; Velasco, R.; Ibarra, I.; Marcilla, A. Modelling liquid–liquid equilibria for island type ternary systems. Fluid Phase Equilibria 2008, 265, 184–191. [Google Scholar] [CrossRef][Green Version]
- Mafra, M.R.; Krähenbühl, M.A. Liquid-Liquid Equilibrium of (Water + Acetone) with Cumene or r-Methylstyrene or Phenol at Temperatures of (323.15 and 333.15) K. J. Chem. Eng. Data 2006, 51, 753–756. [Google Scholar] [CrossRef]
- Roger, K.; Raynal, L.; Shcherbakova, N. Nanoprecipitation through solvent-shifting using rapid mixing: Dispelling the Ouzo boundary to reach large solute concentrations. J. Colloid Interface Sci. 2023, 650, 2049–2055. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



| System | Model | T, C | |
|---|---|---|---|
| water–DMSO–THF | FH (this work) | 20° | 3.53 |
| water–DMSO–THF, [25] | NRTL | 20° | 5.83 |
| water–DMSO–THF, [8] | UNIQUAC | 20° | 3.4 |
| water–DMSO–THF, [24] | NRTL | 20° | 3.18, 3.09 |
| water–DMSO–THF, [24] | UNIQUAC | 20° | 3.97, 3.4 |
| water–acetone–phenol | FH (this work) | 50° | 0.88 |
| water–acetone–phenol, [26] | NRTL | 50° | 0.81 |
| water–acetone–phenol, [24] | NRTL | 50° | 1.13 |
| water–acetone–phenol, [24] | UNIQIAC | 50° | 1.17 |
| water–acetone–phenol | FH (this work) | 56° | 1.27 |
| water–acetone–phenol, [23] | NRTL | 56° | 1.61 |
| water–acetone–phenol, [23] | UNIQUAC | 56° | 1.52 |
| water–acetone–hexadecane | FH (this work) | 20° | 2.92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shcherbakova, N.; Gerbaud, V.; Roger, K. Using the Intrinsic Geometry of Binodal Curves to Simplify the Computation of Ternary Liquid–Liquid Phase Diagrams. Entropy 2023, 25, 1329. https://doi.org/10.3390/e25091329
Shcherbakova N, Gerbaud V, Roger K. Using the Intrinsic Geometry of Binodal Curves to Simplify the Computation of Ternary Liquid–Liquid Phase Diagrams. Entropy. 2023; 25(9):1329. https://doi.org/10.3390/e25091329
Chicago/Turabian StyleShcherbakova, Nataliya, Vincent Gerbaud, and Kevin Roger. 2023. "Using the Intrinsic Geometry of Binodal Curves to Simplify the Computation of Ternary Liquid–Liquid Phase Diagrams" Entropy 25, no. 9: 1329. https://doi.org/10.3390/e25091329
APA StyleShcherbakova, N., Gerbaud, V., & Roger, K. (2023). Using the Intrinsic Geometry of Binodal Curves to Simplify the Computation of Ternary Liquid–Liquid Phase Diagrams. Entropy, 25(9), 1329. https://doi.org/10.3390/e25091329