
Unanimity, Coexistence, and Rigidity: Three Sides of Polarization


Abstract
1. Introduction
- The contrarians: contrarians are agents who have an opinion and argue and vote for it but eventually shift to the opposite one when being in the majority in their local discussion group. The shift is independent of the opinions themselves [51].
2. Opinion Dynamics, Definitions, and Reality
- Unanimity: when is either equal to 1 or very large, around 0.80, as well as equal to 0 or very low, around 0.20, I define the associated state as unanimity. Most agents share opinion A in the first case and opinion B in the second one. The values 0.80 and 0.20 are chosen arbitrarily to set a boundary beyond which one opinion overwhelms the other. In reality, these values fluctuate but preserve the feeling of a landslide victory. Having an overwhelming majority of agents who share the same opinion against a small minority holding the other opinion makes the related entropy small and even zero in cases and .
- Coexistence: when is of the order of , i.e., 0.53 and 0.47, I define the associated state as coexistence if and only if a substantial part of the population keeps shifting opinion without modifying the overall proportions and . It means that the global opinion has reached an attractor located around 0.50, but individual choices are not frozen with noticeable parts of the agents who keep shifting opinions. The value is chosen arbitrarily to set a fuzzy boundary around 0.50. In reality, these values fluctuate a bit but preserve the feeling of a hung outcome in the case of an election. The high level of ongoing shift of individual opinion puts the associated entropy at a high value.
- Rigidity: when is of the order of , i.e., 0.53 and 0.47, I define the associated state as rigidity if and only if the stable global opinion around 0.50 is frozen at individual choices. No noticeable part of the agents keeps shifting opinions. The choices of are chosen arbitrarily to set a boundary around 0.50. In reality, these values fluctuate a little while preserving the feeling that the winner has stolen its victory from the competitor in the event of an election. In this case, the low level of individual opinion shifts produces a low entropy.
3. The Spontaneous Drive towards Democratic Unanimity
4. Prejudices Unconsciously Break the Perfect Democratic Dynamics
4.1. Segregated Polarization
4.2. Combining Groups of Different Sizes
5. Contrarians Fuel Coexistence
- Region 1 lies within the range , featuring tipping point dynamics with being the tipping point. The initial majority is increased by the repeated cycles of local discussions with a monotonic convergence towards the relevant attractor, either when or when . In the first case, A wins the public debate or the related vote but loses in the second case. In both cases, a core minority B (A) subsists against the majority A (B). The two attractors move towards each other with increasing x towards .
- Region 2 starts at where the two attractors and merge and disappear at , turning the tipping point into an attractor. The dynamics shifts suddenly from a tipping point one to a single attractor dynamics. In the range , any initial proportion is moved monotonously by the update dynamics towards , i.e., an equal proportion of agents hold opinions A and B. We have a perfect stable coexistence of both competing opinions in the range .
- Region 3 marks the transition to a situation where contrarians are more numerous than floaters with . Due to this fact, while remains an attractor, reaching it follows an oscillatory convergence. The oscillatory convergence holds in the range . Once the attractor has been reached, the two competing opinions coexist at equal proportions as Region 2.
- Region 4 is the counter part of region 1 where is again a tipping point, but now, the very high proportion of contrarians turn the dynamics into an oscillating divergence from the tipping point instead of a monotonic divergence. In addition, once an attractor has been reached, the dynamics become oscillating between and . Region 4 extends in the range .
5.1. The Polarization at Is Fluid
- The top parts exhibit the magnitudes of the shifts with respect to opinion A where (in red) is the gain from local majority rule diminished by the contrarians. The gain from the loss of local majorities favorable to B is (in blue). The net gain for A is (in green). When only floaters are discussing, (in red dashes) is the gain for A.
- The middle part exhibits the magnitudes of all shifts at the benefit of A ( in red) and B ( in blue) as well as the total shifts accounting for both A and B ( in green). This total is also shown in the absence of contrarians with (in red dashes).
- The bottom part exhibits the magnitude of the difference (in red) in proportions of shifts at the benefit of respectively A and B. The equivalent (in blue) with only floaters is also shown.
5.2. The Magnitude of Fluidity Is a Function of the Discussion Group Size
6. Stubbornness Produces Polarization
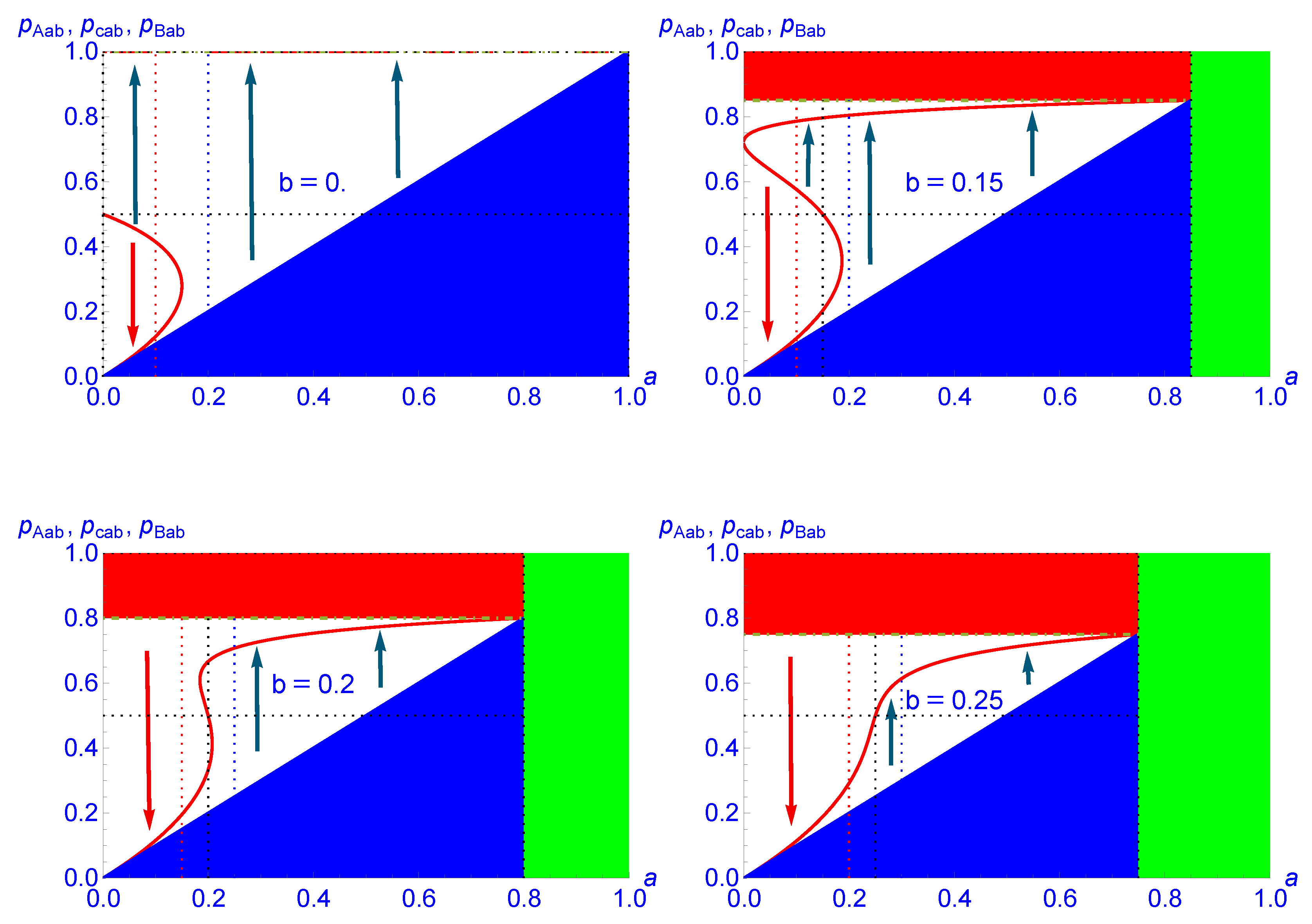
- Regime 1 The first regime is shown in Figure 5 for , where two dynamics are taking place. For small values of a, the dynamic is a tipping point dynamic, but the associated region shrinks with increasing values of b. When a becomes a bit large, above about , the dynamics become a single attractor dynamic with A always winning over B.
- Regime 2 The second regime shown in Figure 5 for has a unique type of dynamics with single attractor dynamics. The opinion having more stubborn agents on its side eventually wins over the other.
6.1. Size Three for the Discussion Group
6.2. The Rigidity of the Stubborn Made Polarization
7. Conclusions
- The fluid polarization is produced by contrarian agents with a good deal of agents who keep shifting opinion between the two opposite parts of the community. This polarization favors a coexistence between the group with a related high entropy.
- The frozen polarization is produced by stubborn agents, which in turn provides a social and psychological basis for hate between the two split parts of a community with a kind of inside ignorance of the other side, with a low value entropy. The community is trapped in a rigid distribution of opinions.
- The segregated polarization is produced by floaters In the absence of contrarians and stubborn agents. The dynamics lead toward unanimity within a connected social subgroup and to segregated polarization between adjacent non-mixing sub-communities. Associated entropies are zero.
Funding
Data Availability Statement
Conflicts of Interest
References
- Gajewski, L.G.; Sienkiewicz, J.; Holyst, J.A. Transitions between polarization and radicalization in a temporal bilayer echo-chamber model. Phys. Rev. E 2022, 105, 024125. [Google Scholar] [CrossRef]
- Kaufman, M.; Kaufman, S.; Diep, H.T. Statistical Mechanics of Political Polarization. Entropy 2022, 24, 1262. [Google Scholar] [CrossRef]
- Törnberg, P.; Andersson, C.; Lindgren, K.; Banisch, S. Modeling the emergence of affective polarization in the social media society. PLoS ONE 2021, 16, e0258259. [Google Scholar] [CrossRef] [PubMed]
- Zafeiris, A. Opinion Polarization in Human Communities Can Emerge as a Natural Consequence of Beliefs Being Interrelated. Entropy 2022, 24, 1320. [Google Scholar] [CrossRef] [PubMed]
- Baumann, F.; Lorenz-Spreen, P.; Sokolov, I.M.; Starnini, M. Emergence of polarized ideological opinions in multidimensional topic spaces. Phys. Rev. 2021, 11, 011012. [Google Scholar] [CrossRef]
- Doniec, M.; Lipiecki, A.; Sznajd-Weron, K. Consensus, Polarization and Hysteresis in the Three-State Noisy q-Voter Model with Bounded Confidence. Entropy 2022, 24, 983. [Google Scholar] [CrossRef]
- Sobkowicz, P. Social Depolarization and Diversity of Opinions-Unified ABM Framework. Entropy 2023, 25, 568. [Google Scholar] [CrossRef]
- Available online: https://en.wikipedia.org/wiki/January_6_United_States_Capitol_attack (accessed on 1 January 2023).
- Available online: https://en.wikipedia.org/wiki/2023_Brazilian_Congress_attack (accessed on 1 January 2023).
- Available online: https://en.wikipedia.org/wiki/2023_Israeli_judicial_reform (accessed on 1 January 2023).
- Iyengar, S.; Lelkes, Y.; Levendusky, M.; Malhotra, N.; Westwood, S.J. The Origins and Consequences of Affective Polarization in the United States. Annu. Rev. Political Sci. 2019, 22, 129–146. [Google Scholar] [CrossRef]
- Schweighofer, S.; Schweitzer, F.; Garcia, D. A weighted balance model of opinion hyperpolarization. J. Artif. Soc. Soc. Simul. 2020, 23, 5. [Google Scholar] [CrossRef]
- Saintier, N.; Pinasco, J.P.; Vazquez, F. A model for the competition between political mono-polarization and bi-polarization. Chaos 2020, 30, 063146. [Google Scholar] [CrossRef]
- Waldner, D.; Lust, E. Unwelcome change: Coming to terms with democratic backsliding. Annu. Rev. Political Sci. 2018, 21, 93. [Google Scholar] [CrossRef]
- Brazil, R. The physics of public opinion, Physics World. January Issue. 2020. Available online: https://physicsworld.com/a/the-physics-of-public-opinion/ (accessed on 1 January 2023).
- Schweitzer, F. Sociophysics. Phys. Today 2018, 71, 40–47. [Google Scholar] [CrossRef]
- Galam, S. Sociophysics: A Physicist’s Modeling of Psycho-political Phenomena; Springer: New York, NY, USA, 2012. [Google Scholar]
- Chakrabarti, B.K.; Chakraborti, A.; Chatterjee, A. (Eds.) Econophysics and Sociophysics: Trends and Perspectives; Wiley-VCH Verlag: Hoboken, NJ, USA, 2006. [Google Scholar]
- Da Luz, M.G.E.; Anteneodo, C.; Crokidakis, N.; Perc, M. Sociophysics: Social collective behavior from the physics point of view. Chaos Solitons Fractals 2023, 170, 113379. [Google Scholar] [CrossRef]
- Crokidakis, N.; Sigaud, L. Role of inflexible minorities in the evolution of alcohol consumption. J. Stat. Mech. Theory Exp. 2022, 9, 093403. [Google Scholar] [CrossRef]
- Tiwari, M.; Yang, X.; Sen, S. Modeling the nonlinear effects of opinion kinematics in elections: A simple Ising model with random field based study. Physica 2021, 582, 126287. [Google Scholar] [CrossRef]
- Tòth, G.; Galam, S. Deviations from the Majority: A Local Flip Model. arXiv 2021, arXiv:2107.09344v1. [Google Scholar] [CrossRef]
- Kowalska-Styczeń, A.; Malarz, K. Noise induced unanimity and disorder in opinion formation. PLoS ONE 2020, 15, e0235313. [Google Scholar]
- Maciel, M.V.; Martins, A.C.R. Ideologically motivated biases in a multiple issues opinion model. Physica 2020, 553, 124293. [Google Scholar] [CrossRef]
- Redner, S. Reality-inspired voter models: A mini-review. Comptes Rendus Phys. 2019, 20, 275–292. [Google Scholar] [CrossRef]
- Galam, S.; Moscovici, S. Towards a theory of collective phenomena. III: Conflicts and Forms of Power. Eur. J. Soc. Psychol. 1995, 25, 217–229. [Google Scholar] [CrossRef]
- Jedrzejewski, A.; Marcjasz, G.; Nail, P.R.; Sznajd-Weron, K. Think then act or act then think? PLoS ONE 2018, 13, e0206166. [Google Scholar] [CrossRef] [PubMed]
- Singh, P.; Sreenivasan, S.; Szymanski, B.K.; Korniss, G. Competing effects of social balance and influence. Phys. Rev. E 2016, 93, 042306. [Google Scholar] [CrossRef]
- Cheon, T.; Morimoto, J. Balancer effects in opinion dynamics. Phys. Lett. A 2016, 380, 429–434. [Google Scholar] [CrossRef]
- Galam, S.; Mauger, A. On reducing terrorism power: A hint from physics. Physica 2003, 323, 695–704. [Google Scholar] [CrossRef]
- Crokidakis, N. Radicalization phenomena: Phase transitions, extinction processes and control of violent activities. arXiv 2022, arXiv:2212.11361. [Google Scholar] [CrossRef]
- Bagnoli, F.; Rechtman, R. Bifurcations in models of a society of reasonable contrarians and conformists. Phys. Rev. E 2015, 92, 042913. [Google Scholar] [CrossRef]
- Carbone, G.; Giannoccaro, I. Model of human collective decision-making in complex environments. Eur. Phys. J. B 2015, 88, 339. [Google Scholar] [CrossRef]
- Sznajd-Weron, K.; Szwabiński, J.; Weron, R. Is the Person-Situation Debate Important for Agent-Based Modeling and Vice-Versa? PLoS ONE 2014, 9, e112203. [Google Scholar] [CrossRef]
- Chacoma, A.; Zanette, D.H. Critical phenomena in the spreading of opinion consensus and disagreement. Pap. Phys. 2014, 6, 060003. [Google Scholar] [CrossRef]
- Florian, R.; Galam, S. Optimizing conflicts in the formation of strategic alliances. Eur. Phys. J. -Condens. Matter Complex Syst. 2000, 16, 189–194. [Google Scholar] [CrossRef]
- Javarone, M.A. Networks strategies in election campaigns. J. Stat. Mech. 2014, 2014, P08013. [Google Scholar] [CrossRef]
- Goncalves, S.; Laguna, M.F.; Iglesias, J.R. Why, when, and how fast innovations are adopted. Eur. Phys. J. B 2012, 85, 192. [Google Scholar] [CrossRef]
- Ellero, A.; Fasano, G.; Sorato, A. A modified Galam’s model for word-of-mouth information exchange. Physica 2009, 388, 3901–3910. [Google Scholar] [CrossRef]
- Gimenez, M.C.; Reinaudi, L.; Vazquez, F. Contrarian Voter Model under the Influence of an Oscillating Propaganda: Consensus, Bimodal Behavior and Stochastic Resonance. Entropy 2022, 24, 1140. [Google Scholar] [CrossRef]
- Iacominia, E.; Vellucci, P. Contrarian effect in opinion forming: Insights from Greta Thunberg phenomenon. J. Math. Sociol. 2023, 47, 123–169. [Google Scholar] [CrossRef]
- Brugnoli, E.; Delmastro, M. Dynamics of (mis)information flow and engaging power of narratives. arXiv 2022, arXiv:2207.12264v2. [Google Scholar]
- Calvõ, A.M.; Ramos, M.; Anteneodo, C. Role of the plurality rule in multiple choices. J. Stat. Mech. 2016, 2016, 023405. [Google Scholar] [CrossRef]
- Mobilia, M. Fixation and polarization in a three-species opinion dynamics model. Eur. Phys. Lett. 2011, 95, 50002. [Google Scholar] [CrossRef]
- Galam, S.; Cheon, T. Tipping points in opinion dynamics: A universal formula in five dimensions. Front. Phys. 2020, 8, 446. [Google Scholar] [CrossRef]
- Galam, S. Opinion Dynamics and Unifying Principles: A Global Unifying Frame. Entropy 2022, 24, 1201. [Google Scholar] [CrossRef]
- Galam, S. Majority rule, hierarchical structures, and democratic totalitarianism: A statistical approach. J. Math. Psychol. 1986, 30, 426. [Google Scholar] [CrossRef]
- Galam, S.; Chopard, B.; Masselot, A.; Droz, M. Competing species dynamics: Qualitative advantage versus geography. Eur. Phys. J. B 1998, 4, 529–531. [Google Scholar] [CrossRef]
- Galam, S. Minority Opinion Spreading in Random Geometry. Eur. Phys. J. B 2002, 25, 403–406. [Google Scholar] [CrossRef]
- Galam, S. Heterogeneous beliefs, segregation, and extremism in the making of public opinions. Phys. Rev. 2005, 71, 046123. [Google Scholar] [CrossRef] [PubMed]
- Galam, S. Contrarian Deterministic Effects on Opinion Dynamics: The Hung Elections Scenario. Physica 2004, 333, 453–460. [Google Scholar] [CrossRef]
- Galam, S.; Jacobs, F. The role of inflexible minorities in the breaking of democratic opinion dynamics. Physica 2007, 381, 366–376. [Google Scholar] [CrossRef]
- Galam, S. Collective beliefs versus individual inflexibility: The unavoidable biases of a public debate. Phys. Stat. Mech. Its Appl. 2011, 390, 3036–3054. [Google Scholar] [CrossRef]
- Martins, A.C.R.; Galam, S. Building up of individual inflexibility in opinion dynamics. Phys. Rev. 2013, 87, 042807. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Size | 3 | 4 | 4 Unchanged |
|---|---|---|---|
| 0.35 | 0.388 | 0.20 | |
| 0.575 | 0.556 | 0.369 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galam, S. Unanimity, Coexistence, and Rigidity: Three Sides of Polarization. Entropy 2023, 25, 622. https://doi.org/10.3390/e25040622
Galam S. Unanimity, Coexistence, and Rigidity: Three Sides of Polarization. Entropy. 2023; 25(4):622. https://doi.org/10.3390/e25040622
Chicago/Turabian StyleGalam, Serge. 2023. "Unanimity, Coexistence, and Rigidity: Three Sides of Polarization" Entropy 25, no. 4: 622. https://doi.org/10.3390/e25040622
APA StyleGalam, S. (2023). Unanimity, Coexistence, and Rigidity: Three Sides of Polarization. Entropy, 25(4), 622. https://doi.org/10.3390/e25040622