









Tsallis Entropy of a Used Reliability System at the System Level



Abstract
1. Introduction
2. Tsallis Entropy of the System in Terms of Signature Vectors of the System
- (i)
- Consider a Pareto type II with the survival functionIt is not hard to see thatIt is obvious that the Tsallis entropy of is an increasing function of time Thus, the uncertainty of the conditional lifetime increases as t increases. We recall that this distribution has the DFR property.
- (ii)
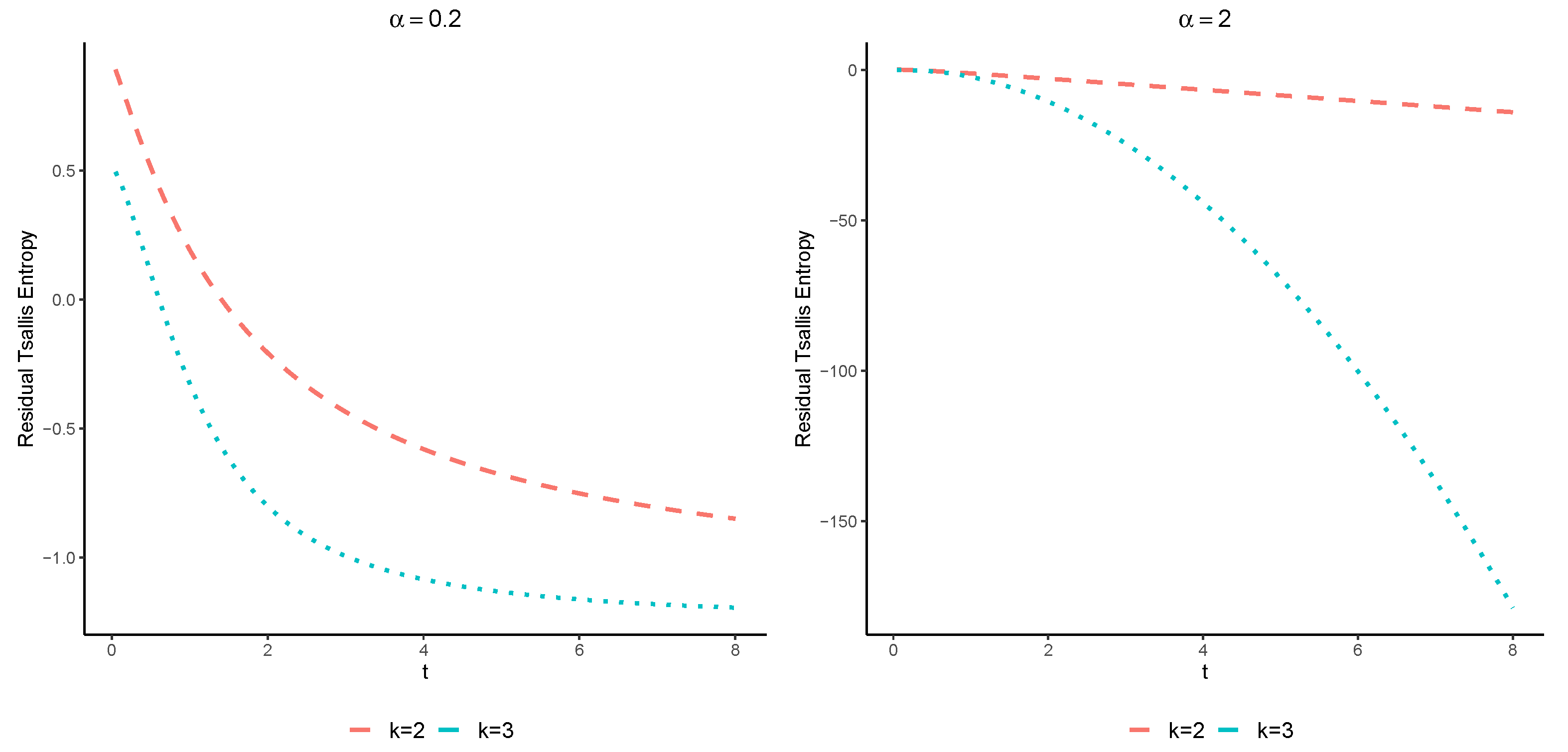
- Let us suppose that X has a Weibull distribution with the shape parameter k with the survival functionAfter some manipulation, we haveIt is difficult to find an explicit expression for the above relation, and therefore we are forced to calculate it numerically. In Figure 1 we have plotted the entropy of as a function of time t for values of and and In this case, it is known that X is DFR when As expected from Theorem 2, it is obvious that is increasing in t for The results are shown in Figure 1.
3. Entropy Ordering of Two Coherent Systems
- (i)
- if is increasing in u for all then for all .
- (ii)
- if is decreasing in u for all then for all .
4. Some Useful Bounds
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ebrahimi, N.; Pellerey, F. New partial ordering of survival functions based on the notion of uncertainty. J. Appl. Probab. 1995, 32, 202–211. [Google Scholar] [CrossRef]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Tsallis, C. Possible generalization of Boltzmann-Gibbs statistics. J. Stat. Phys. 1988, 52, 479–487. [Google Scholar] [CrossRef]
- Asadi, M.; Ebrahimi, N.; Soofi, E.S. Dynamic generalized information measures. Stat. Probab. Lett. 2005, 71, 85–98. [Google Scholar] [CrossRef]
- Nanda, A.K.; Paul, P. Some results on generalized residual entropy. Inf. Sci. 2006, 176, 27–47. [Google Scholar] [CrossRef]
- Zhang, Z. Uniform estimates on the Tsallis entropies. Lett. Math. Phys. 2007, 80, 171–181. [Google Scholar] [CrossRef]
- Irshad, M.R.; Maya, R.; Buono, F.; Longobardi, M. Kernel estimation of cumulative residual Tsallis entropy and its dynamic version under ρ-mixing dependent data. Entropy 2021, 24, 9. [Google Scholar] [CrossRef]
- Rajesh, G.; Sunoj, S. Some properties of cumulative Tsallis entropy of order alpha. Stat. Pap. 2019, 60, 583–593. [Google Scholar] [CrossRef]
- Toomaj, A.; Atabay, H.A. Some new findings on the cumulative residual Tsallis entropy. J. Comput. Appl. Math. 2022, 400, 113669. [Google Scholar] [CrossRef]
- Mohamed, M.S.; Barakat, H.M.; Alyami, S.A.; Abd Elgawad, M.A. Cumulative residual tsallis entropy-based test of uniformity and some new findings. Mathematics 2022, 10, 771. [Google Scholar] [CrossRef]
- Maasoumi, E. The measurement and decomposition of multi-dimensional inequality. Econom. J. Econom. Soc. 1986, 54, 991–997. [Google Scholar] [CrossRef]
- Abe, S. Axioms and uniqueness theorem for Tsallis entropy. Phys. Lett. A 2000, 271, 74–79. [Google Scholar] [CrossRef]
- Asadi, M.; Ebrahimi, N.; Soofi, E.S. Connections of Gini, Fisher, and Shannon by Bayes risk under proportional hazards. J. Appl. Probab. 2017, 54, 1027–1050. [Google Scholar] [CrossRef]
- Alomani, G.; Kayid, M. Further Properties of Tsallis Entropy and Its Application. Entropy 2023, 25, 199. [Google Scholar] [CrossRef] [PubMed]
- Abdolsaeed, T.; Doostparast, M. A note on signature-based expressions for the entropy of mixed r-out-of-n systems. Nav. Res. Logist. (NRL) 2014, 61, 202–206. [Google Scholar]
- Toomaj, A. Renyi entropy properties of mixed systems. Commun. Stat.-Theory Methods 2017, 46, 906–916. [Google Scholar] [CrossRef]
- Toomaj, A.; Di Crescenzo, A.; Doostparast, M. Some results on information properties of coherent systems. Appl. Stoch. Model. Bus. Ind. 2018, 34, 128–143. [Google Scholar] [CrossRef]
- Baratpour, S.; Khammar, A. Tsallis entropy properties of order statistics and some stochastic comparisons. J. Stat. Res. Iran JSRI 2016, 13, 25–41. [Google Scholar] [CrossRef]
- Shaked, M.; Shanthikumar, J.G. Stochastic Orders; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Samaniego, F.J. System Signatures and Their Applications in Engineering Reliability; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007; Volume 110. [Google Scholar]
- Khaledi, B.E.; Shaked, M. Ordering conditional lifetimes of coherent systems. J. Stat. Plan. Inference 2007, 137, 1173–1184. [Google Scholar] [CrossRef]
- Ebrahimi, N.; Kirmani, S. Some results on ordering of survival functions through uncertainty. Stat. Probab. Lett. 1996, 29, 167–176. [Google Scholar] [CrossRef]
- Toomaj, A.; Chahkandi, M.; Balakrishnan, N. On the information properties of working used systems using dynamic signature. Appl. Stoch. Model. Bus. Ind. 2021, 37, 318–341. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kayid, M.; Alshehri, M.A. Tsallis Entropy of a Used Reliability System at the System Level. Entropy 2023, 25, 550. https://doi.org/10.3390/e25040550
Kayid M, Alshehri MA. Tsallis Entropy of a Used Reliability System at the System Level. Entropy. 2023; 25(4):550. https://doi.org/10.3390/e25040550
Chicago/Turabian StyleKayid, Mohamed, and Mashael A. Alshehri. 2023. "Tsallis Entropy of a Used Reliability System at the System Level" Entropy 25, no. 4: 550. https://doi.org/10.3390/e25040550
APA StyleKayid, M., & Alshehri, M. A. (2023). Tsallis Entropy of a Used Reliability System at the System Level. Entropy, 25(4), 550. https://doi.org/10.3390/e25040550