

Attention Network with Information Distillation for Super-Resolution


Abstract
:1. Introduction
- We propose an attention network with an information distillation structure (AIDN) for efficient and accurate image super-resolution, which extracts the valuable intermediate features step by step using the distillation structures;
- We introduce gate channel transformation (GCT) into SISR and use it in one distillation branch;
- We propose a recalibrated attention module (RAM) to re-highlight the contributions of features and strengthen the expressive ability of the network. Comprehensive experimental results demonstrate that the proposed method strikes a good balance between performance and model size.
2. Related Work
2.1. Deep CNN-Based Super-Resolution Methods
2.2. Attention Mechanism
3. Proposed Method
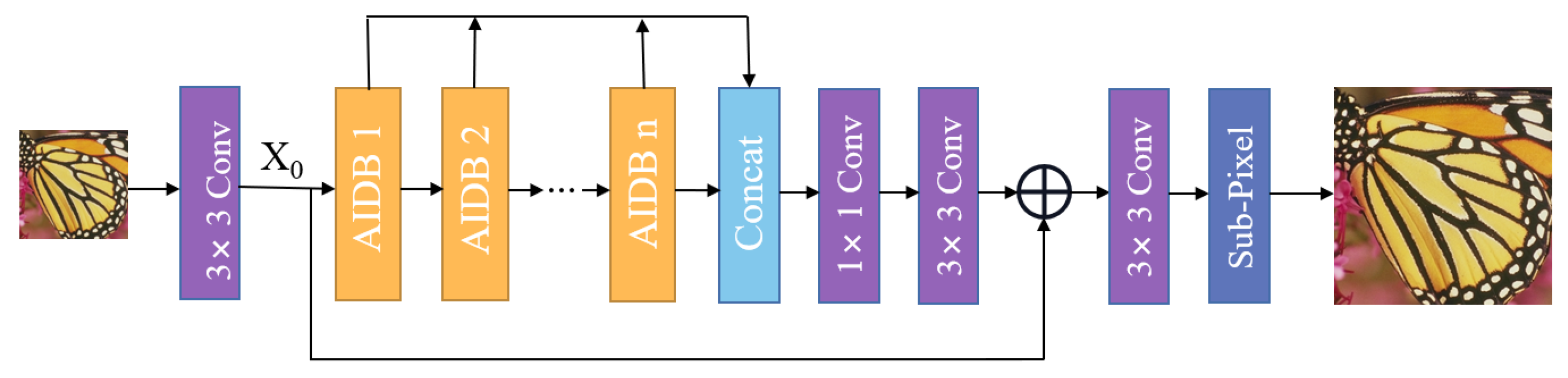
3.1. Network Architecture
3.2. Attention Information Distillation Block
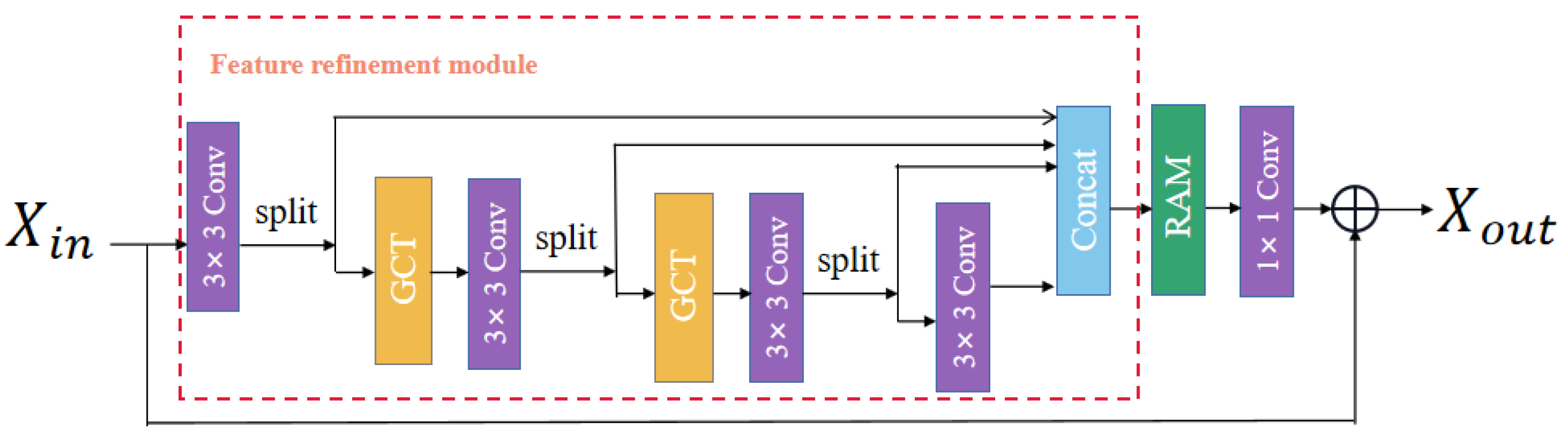
3.3. Feature Refinement Module
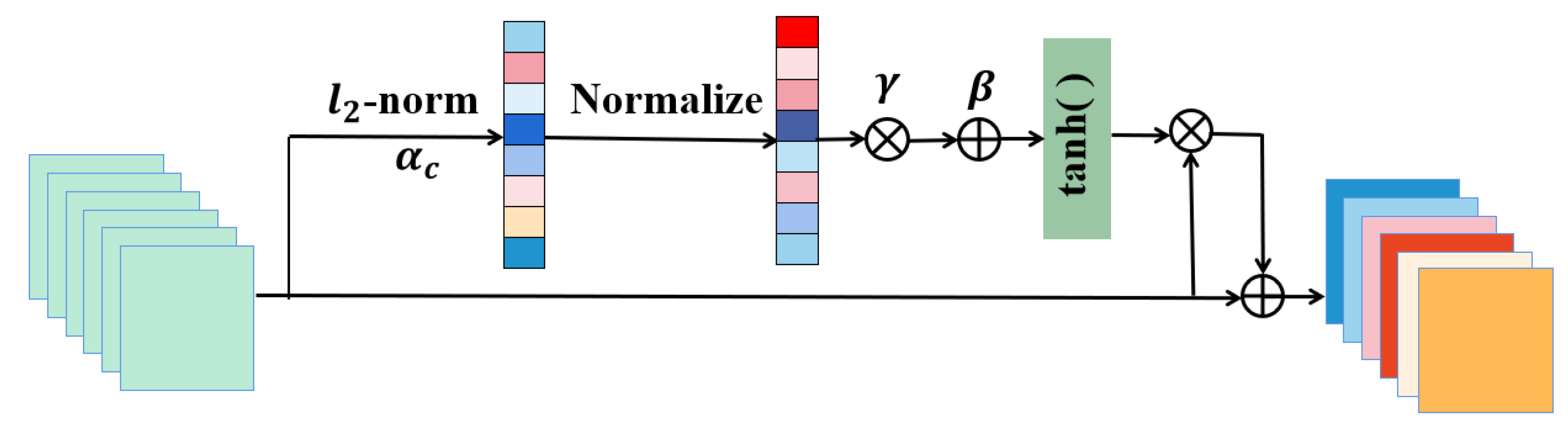
3.4. Gate Channel Transformation
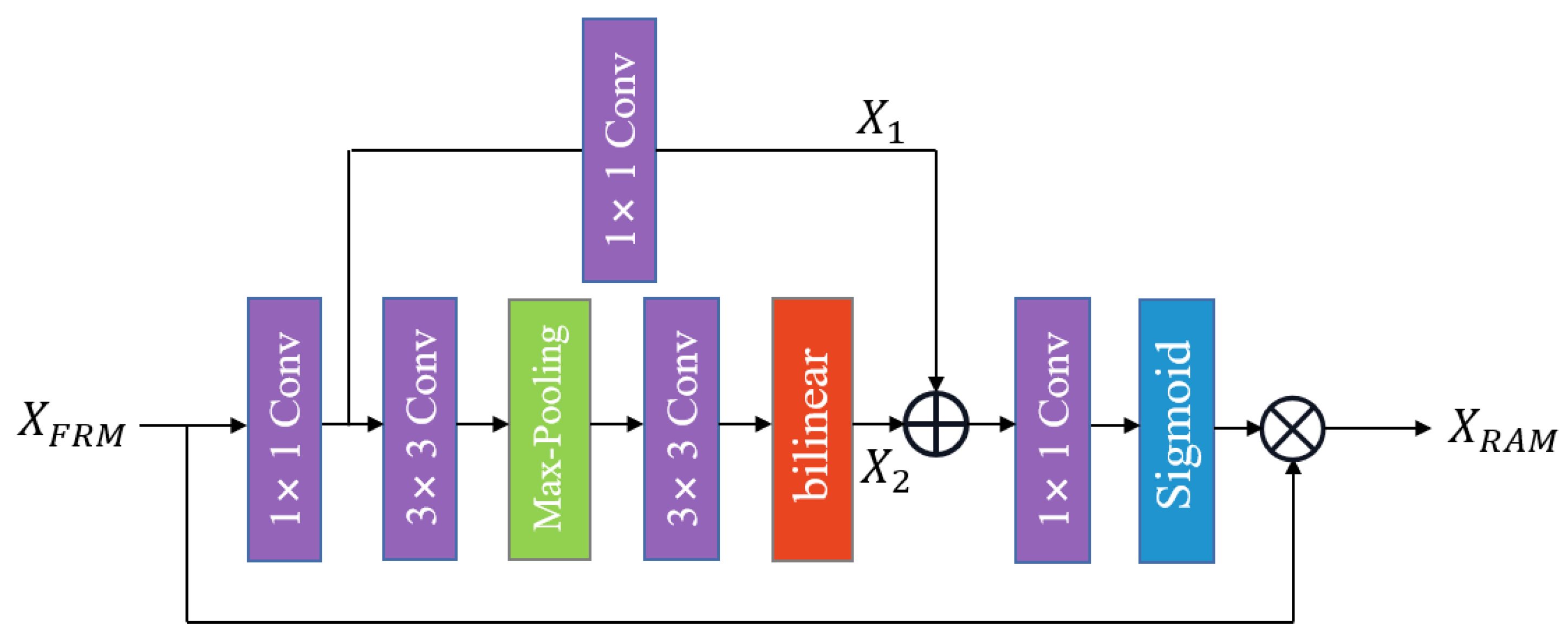
3.5. Recalibrated Attention Module
4. Experiments Section
4.1. Datasets and Metrics
4.2. Implementation Details
4.2.1. Training Settings
4.2.2. Model Details
4.3. Study of GCT and RAM
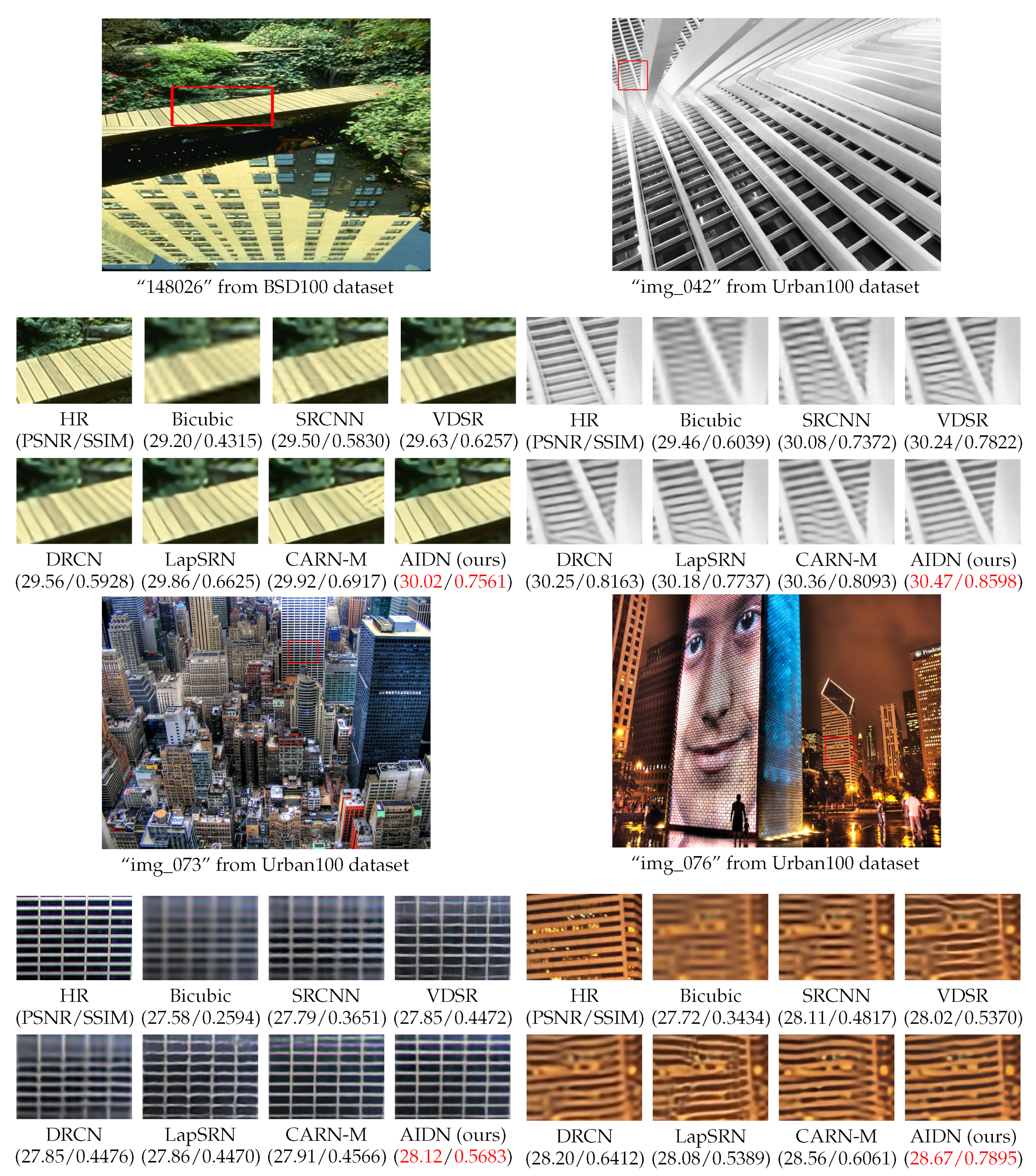
4.4. Comparison with State-of-the-Art Methods
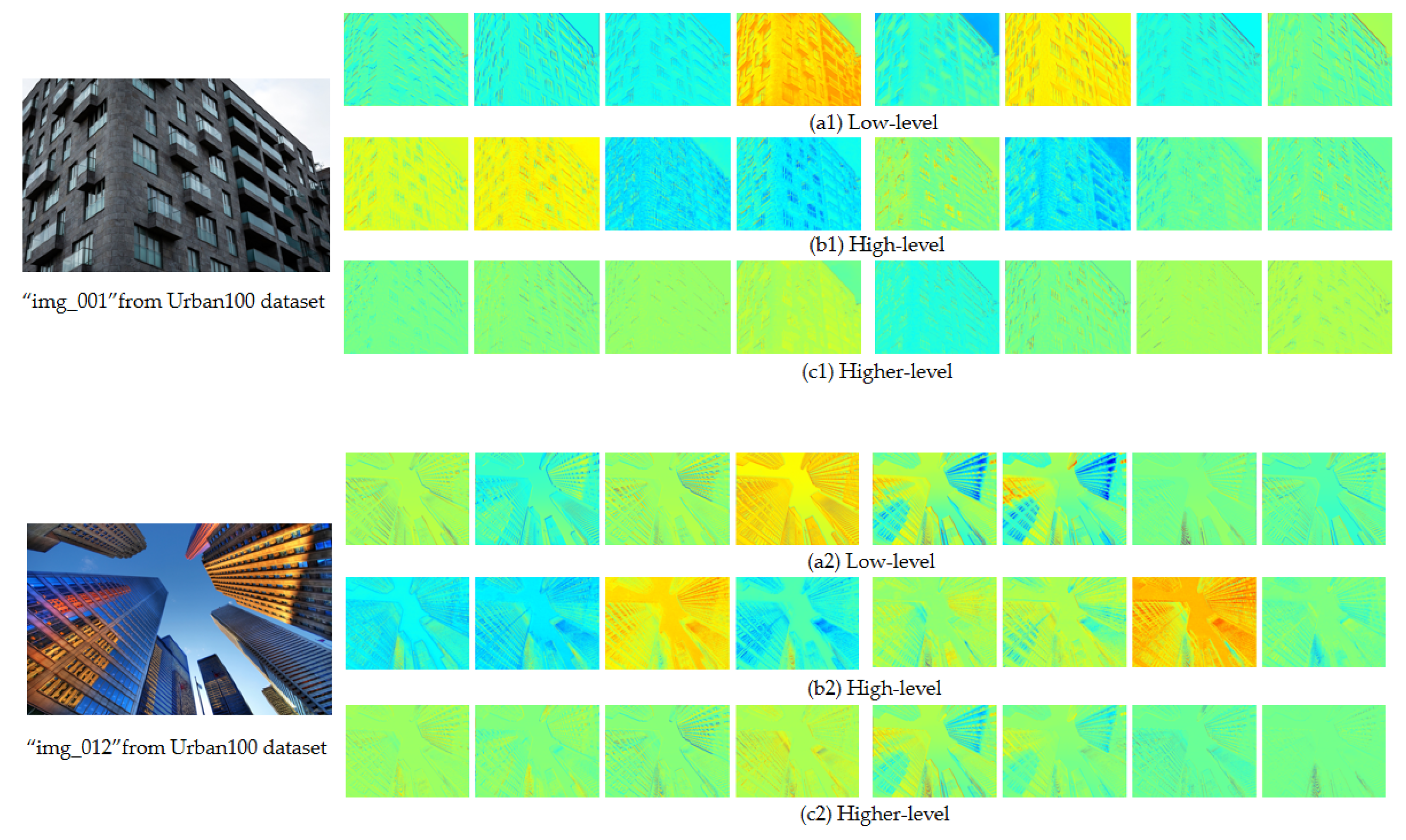
4.5. Heatmaps of the Proposed AIDN
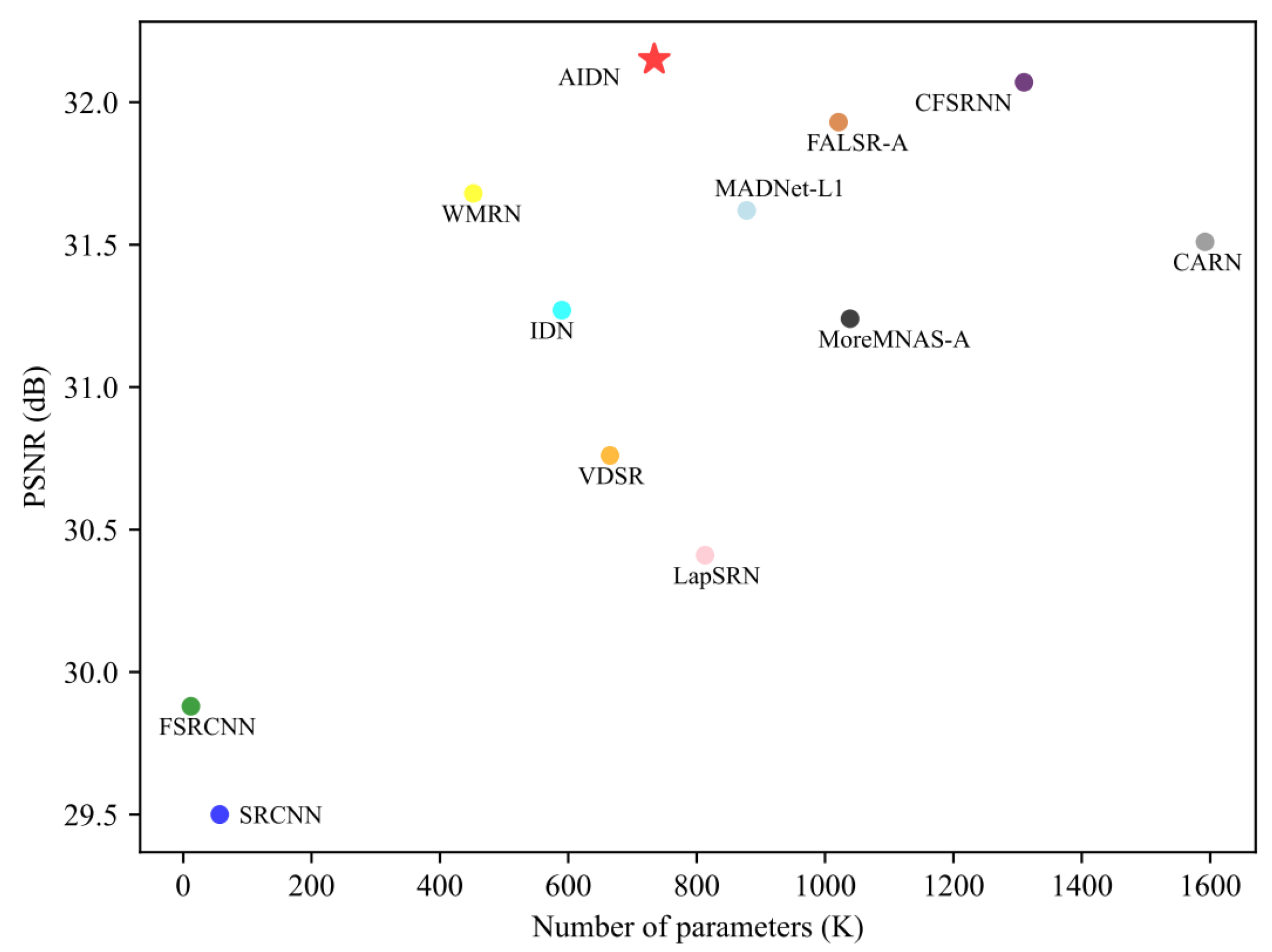
4.6. Model Size Analysis
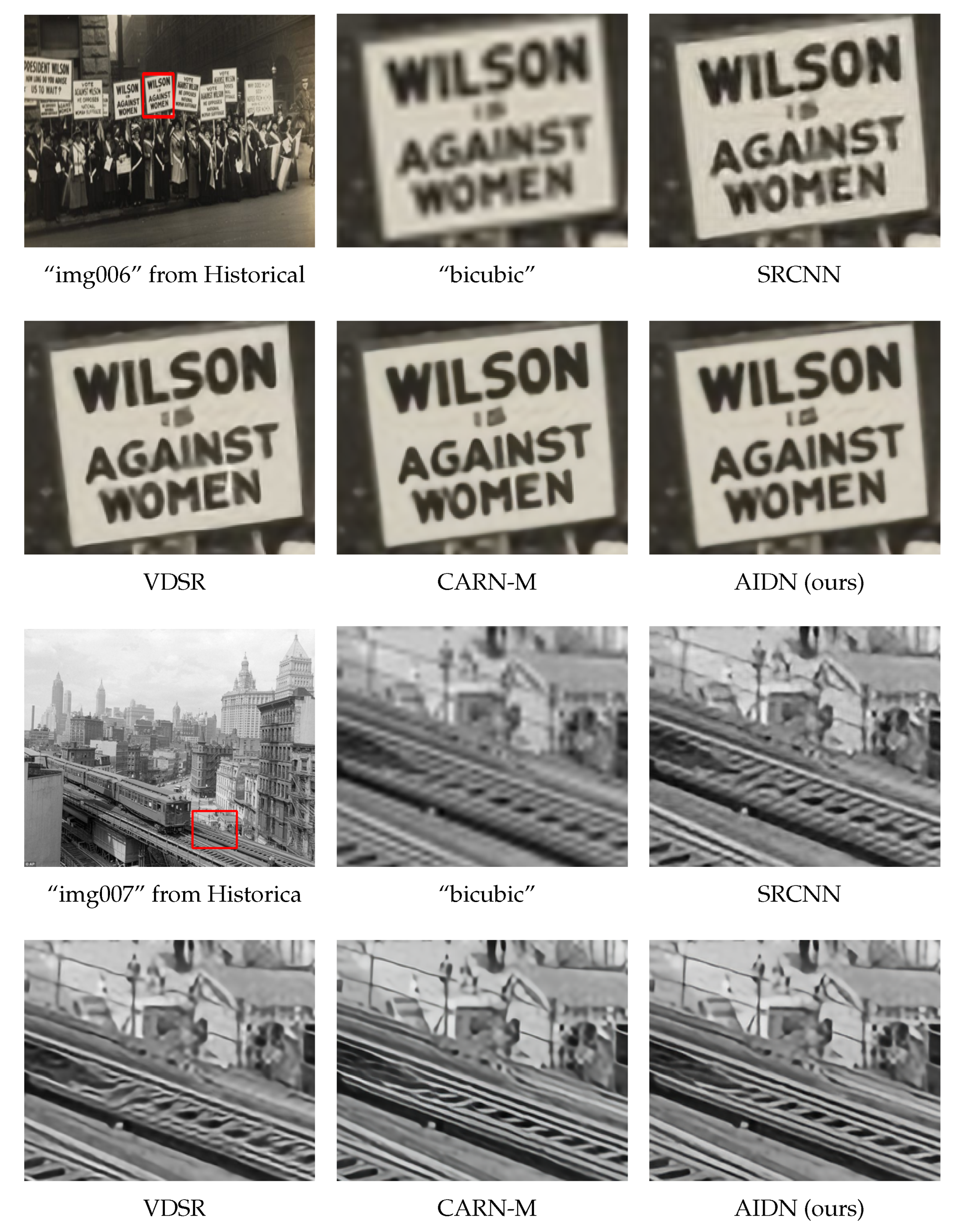
4.7. Visualization on Historical Images
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. ImageNet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef]
- Guo, T.; Dai, T.; Liu, L.; Zhu, Z.; Xia, S.-T. S2A:Scale Attention-Aware Networks for Video Super-Resolution. Entropy 2021, 23, 1398. [Google Scholar] [CrossRef] [PubMed]
- Tang, R.; Chen, L.; Zou, Y.; Lai, Z.; Albertini, M.K.; Yang, X. Lightweight network with one-shot aggregation for image super-resolution. J. Real-Time Image Process. 2021, 18, 1275–1284. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, N.; Xin, J.; Xia, X.; Yang, X.; Gao, X. Learning lightweight super-resolution networks with weight pruning. Neural Netw. 2021, 144, 21–32. [Google Scholar] [CrossRef] [PubMed]
- Dong, C.; Loy, C.C.; He, K.; Tang, X. Learning a deep convolutional network for image super-resolution. In Proceedings of the European Conference on Computer Vision—ECCV 2014, Zurich, Switzerland, 6–12 September 2014; pp. 184–199. [Google Scholar]
- Kim, J.; Lee, J.K.; Lee, K.M. Accurate image super-resolution using very deep convolutional networks. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1646–1654. [Google Scholar]
- Kim, J.; Lee, J.K.; Lee, K.M. Deeply-recursive convolutional network for image super-resolution. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1637–1645. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Dong, C.; Chen, C.L.; Tang, X.O. Accelerating the Super-Resolution Convolutional Neural Network. In Proceedings of the 2016 European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016. [Google Scholar]
- Shi, W.; Caballero, J.; Huszár, F.; Totz, J.; Aitken, A.P.; Bishop, R.; Rueckert, D.; Wang, Z. Real-time single image and video super-resolution using an efficient sub-pixel convolutional neural network. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1874–1883. [Google Scholar]
- Lim, B.; Son, S.; Kim, H.; Nah, S.; Lee, K.M. Enhanced deep residual networks for single image super-resolution. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017; pp. 1132–1140. [Google Scholar]
- Li, Z.; Wang, C.; Wang, J.; Ying, S.; Shi, J. Lightweight adaptive weighted network for single image super-resolution. Comput. Vis. Image Underst. 2021, 211, 103254. [Google Scholar] [CrossRef]
- Tong, T.; Li, G.; Liu, X.J.; Gao, Q.Q. Image Super-Resolution Using Dense Skip Connections. In Proceedings of the 2017 IEEE/CVF International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 4809–4817. [Google Scholar]
- Huang, G.; Liu, Z.; Maaten, L.V.D.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2261–2269. [Google Scholar]
- Song, D.; Xu, C.; Jia, X.; Chen, Y.; Xu, C.; Wang, Y. Efficient residual dense block search for image super-resolution. In Proceedings of the Thirty-Fourth AAAI Conference on Artificial Intelligence (AAAI), New York, NY, USA, 7–12 February 2020. [Google Scholar]
- Zoph, B.; Le, Q.V. Neural architecture search with reinforcement learning. In Proceedings of the International Conference on Learning Representations, Toulon, France, 24–26 April 2017. [Google Scholar]
- Zhang, Y.L.; Li, K.P.; Li, K.; Wang, L.C.; Zhong, B.E.; Fu, Y. Image Super-Resolution Using Very Deep Residual Channel Attention Networks. In Proceedings of the 2018 European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Hui, Z.; Wang, X.; Gao, X. Fast and accurate single image superresolution via information distillation network. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 723–731. [Google Scholar]
- Lan, R.; Sun, L.; Liu, Z.; Lu, H.; Pang, C.; Luo, X. MADNet: A Fast and Lightweight Network for Single-Image Super Resolution. IEEE Trans. Cybern. 2021, 51, 1443–1453. [Google Scholar] [CrossRef] [PubMed]
- Lai, W.S.; Huang, J.B.; Ahuja, N.; Yang, M.H. Deep Laplacian pyramid networks for fast and accurate super-resolution. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 624–632. [Google Scholar]
- Sun, L.; Liu, Z.; Sun, X.; Liu, L.; Lan, R.; Luo, X. Lightweight Image Super-Resolution via Weighted Multi-Scale Residual Network. IEEE/CAA J. Autom. Sin. 2021, 8, 1271–1280. [Google Scholar] [CrossRef]
- Tian, C.; Xu, Y.; Zuo, W.; Zhang, B.; Fei, L.; Lin, C.W. Coarse-to-fine cnn for image super-resolution. IEEE Trans. Multimed. 2020, 23, 1489–1502. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, W.J.; Tang, Y.T.; Tang, J.; Wu, G.S. Residual Feature Aggregation Network for Image Super-Resolution. In Proceedings of the 2020 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 2357–2365.
- Zhang, Y.; Tian, Y.; Kong, Y.; Zhong, B.; Fu, Y. Residual dense network for image super-resolution. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Zhang, X.Y.; Gao, P.; Liu, S.X.; Zhao, K.Y.; Yin, L.G.; Chen, C.W. Accurate and Efficient Image Super-Resolution via Global-Local Adjusting Dense Network. IEEE Trans. Multimed. 2021, 23, 1924–1937. [Google Scholar] [CrossRef]
- Ahn, N.; Kang, B.; Sohn, K. Fast, accurate, and lightweight super-resolution with cascading residual network. In Proceedings of the 2018 European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Zhu, F.Y.; Zhao, Q.J. Efficient single image super-resolution via hybrid residual feature learning with compact back-projection network. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Korea, 27 October 2019; pp. 2453–2460. [Google Scholar]
- Song, D.H.; Wang, Y.H.; Chen, H.T.; Xu, C.J.; Tao, D.C. AdderSR: Towards Energy Efficient Image Super-Resolution. In Proceedings of the 2021 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Online, 19–25 June 2021; pp. 1–10. [Google Scholar]
- Chu, X.; Zhang, B.; Ma, H.; Xu, R.; Li, J.; Li, Q. Fast, accurate and lightweight super-resolution with neural architecture search. In Proceedings of the Conference: 2020 25th International Conference on Pattern Recognition (ICPR), Online, 10–15 January 2020. [Google Scholar]
- Chen, G.A.; Matsune, A.; Du, H.; Liu, X.Z.; Zhan, S. Exploring more diverse network architectures for single image super-resolution. Knowl.-Based Syst. 2022, 235, 1–14. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-Excitation Networks. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 7132–7141. [Google Scholar]
- Wang, X.L.; Girshick, R.; Gupta, A.; He, K.M. Non-local Neural Networks. In Proceedings of the 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 7794–7803. [Google Scholar]
- Woo, S.H.Y.; Park, J.C.; Lee, J.Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Yang, Z.X.; Zhu, L.C.; Wu, Y.; Yang, Y. Gated Channel Transformation for Visual Recognition. In Proceedings of the 2020 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 1791–1800. [Google Scholar]
- Wang, Q.L.; Wu, B.G.; Zhu, P.F.; Li, P.H.; Zuo, W.M.; Hu, Q.H. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the 2020 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 1531–1539. [Google Scholar]
- Dai, T.; Cai, J.R.; Zhang, Y.B.; Xia, S.T.; Zhang, L. Second-order Attention Network for Single Image Super-Resolution. In Proceedings of the 2019 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 1057–1066. [Google Scholar]
- Anwar, S.; Barnes, N. Densely Residual Laplacian Super-Resolution. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 44, 1192–1204. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.T.; Li, J.; Huang, Y.F.; Gao, X.B. Channel-wise and spatial feature modulation network for single image super-resolution. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 3911–3927. [Google Scholar] [CrossRef]
- Mei, Y.Q.; Fan, Y.C.; Zhou, Y.Q.; Huang, L.C. Image Super-Resolution with Cross-Scale Non-Local Attention and Exhaustive Self-Exemplars Mining. In Proceedings of the 2020 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 5689–5698. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25, 84–90. [Google Scholar] [CrossRef]
- Agustsson, E.; Timofte, R. Ntire 2017 challenge on single image super-resolution: Dataset and study. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Honolulu, HI, USA, 21–26 June 2017. [Google Scholar]
- Bevilacqua, M.; Roumy, A.; Guillemot, C.; Morel, M.l. Low-complexity single-image super-resolution based on nonnegative neighbor embedding. In Proceedings of the British Machine Vision Conference, Surrey, UK, 3–7 September 2012; pp. 135.1–135.10. [Google Scholar]
- Zeyde, R.; Elad, M.; Protter, M. On single image scale-up using sparse-representations. In Curves and Surfaces; Boissonnat, J.-D., Chenin, P., Cohen, A., Christian, G., Lyche, T., Mazure, M.-L., Schumaker, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 711–730. [Google Scholar]
- Martin, D.; Fowlkes, C.; Tal, D.; Malik, J. A database of human segmented natural images and its application to evaluating segmentation algorithms and measuring ecological statistics. In Proceedings of the 8th International Conference on Computer Vision, Vancouver, BC, Canada, 7–14 July 2001; Volume 2, pp. 416–423. [Google Scholar]
- Huang, J.; Singh, A.; Ahuja, N. Single image super-resolution from transformed self-exemplars. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 5197–5206. [Google Scholar]
- Matsui, Y.; Ito, K.; Aramaki, Y.; Fujimoto, A.; Ogawa, T.; Yamasaki, T.; Aizawa, K. Sketch-based manga retrieval using manga109 dataset. Multimed. Tools Appl. 2017, 76, 21811–21838. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Kingma, D.; Ba, J. Adam: A method for stochastic optimization. In Proceedings of the International Conference on Learning Representations, Banff, AB, Canada, 14–16 April 2014. [Google Scholar]
- Maas, A.L.; Hannun, A.Y.; Ng, A.Y. Rectifier nonlinearities improve neural network acoustic models. In Proceedings of the ICML Workshop on Deep Learning for Audio, Speech and Language Processing, Atlanta, GA, USA, 16–21 June 2013. [Google Scholar]
- Chu, X.; Zhang, B.; Xu, R.; Ma, H. Multi-objective reinforced evolution in mobile neural architecture search. In Proceedings of the European Conference on Computer Vision (ECCV), Online, 23–28 August 2020. [Google Scholar]
- Hu, Y.T.; Gao, X.B.; Li, J.; Wang, H.Z. Single image super-resolution with multi-scale information cross-fusion network. Image Process. 2021, 179, 107831. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Batch size | 48 × 48 |
| Patch size | 16 |
| The numbers of information distillation blocks | 6 |
| Initial learning rate | |
| Channels | 64 |
| Channels—reserved (split) | 16 |
| Optimizer (Adam) | , |
| Scale | GCT | RAM | Params | Set5 | Set14 | BSD100 | Urban100 | Manga109 |
|---|---|---|---|---|---|---|---|---|
| (K) | PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | |||
| ×2 | × | × | 690 | 37.63/0.9584 | 31.30/0.9146 | 31.94/0.8966 | 31.31/0.9199 | 37.79/0.9744 |
| ×2 | ✔ | × | 691 | 37.81/0.9591 | 33.41/0.9157 | 32.07/0.8980 | 31.75/0.9241 | 38.27/0.9754 |
| ×2 | × | ✔ | 733 | 37.85/0.9592 | 33.51/0.9167 | 32.10/0.8982 | 31.94/0.9260 | 38.44/0.9758 |
| ×2 | ✔ | ✔ | 734 | 37.95/0.9596 | 33.57/0.9169 | 32.16/0.8989 | 32.16/0.9278 | 38.68/0.9763 |
| Method | Scale | Params | Set5 | Set10 | BSD100 | Urban100 | Manga109 |
|---|---|---|---|---|---|---|---|
| (K) | PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | ||
| SRCNN [5] | ×2 | 57 | 36.66/0.9542 | 32.42/0.9063 | 31.36/0.8879 | 29.50/0.8946 | 35.60/0.9663 |
| VDSR [6] | ×2 | 665 | 37.53/0.9587 | 33.03/0.9124 | 31.90/0.8960 | 30.76/0.9140 | 37.22/0.9729 |
| LapSRN [20] | ×2 | 813 | 37.52/0.9590 | 33.08/0.9130 | 31.80/0.8950 | 30.41/0.9100 | 37.27/0.9740 |
| IDN [18] | ×2 | 590 | 37.83/0.9600 | 33.30/0.9148 | 32.08/0.8950 | 31.27/0.9196 | - |
| CARN-M [26] | ×2 | 412 | 37.53/0.9583 | 33.26/0.9141 | 31.92/0.8960 | 30.83/0.9233 | - |
| AWSRN-S [12] | ×2 | 397 | 37.75/0.9596 | 33.31/0.9151 | 32.00/0.8974 | 31.39/0.9207 | 37.90/0.9755 |
| ESRN-V [15] | ×2 | 324 | 37.85/0.9600 | 33.42/0.9161 | 32.10/0.8987 | 31.79/0.9248 | - |
| WMRN [21] | ×2 | 452 | 37.83/0.9599 | 33.41/0.9162 | 32.08/0.8984 | 31.68/0.9241 | 38.27/0.9763 |
| MADNet-L1 [19] | ×2 | 878 | 37.85/0.9600 | 33.38/0.9161 | 32.04/0.8979 | 31.62/0.9233 | - |
| MoreMNAS-A [50] | ×2 | 1039 | 37.63/0.9584 | 33.23/0.9138 | 31.95/0.8961 | 31.24/0.9187 | - |
| MSICF [51] | ×2 | 1900 | 37.89/0.9605 | 33.41/0.9153 | 32.15/0.8992 | 31.47/0.9220 | - |
| FALSR-A [29] | ×2 | 1021 | 37.82/0.9595 | 33.55/0.9168 | 32.12/0.8987 | 31.93/0.9256 | - |
| CFSRCNN [22] | ×2 | 1310 | 37.79/0.9591 | 33.51/0.9165 | 32.11/0.8988 | 32.07/0.9273 | - |
| AIDN(ours) | ×2 | 734 | 37.95/0.9603 | 33.57/0.9169 | 32.16/0.8993 | 32.16/0.9278 | 38.68/0.9782 |
| SRCNN [5] | ×3 | 57 | 32.75/0.9090 | 29.28/0.8209 | 28.41/0.7863 | 26.24/0.7989 | 30.59/0.9107 |
| VDSR [6] | ×3 | 665 | 33.66/0.9213 | 29.77/0.8314 | 28.82/0.7976 | 27.14/0.8279 | 32.01/0.9310 |
| IDN [18] | ×3 | 590 | 34.11/0.9253 | 29.99/0.8354 | 28.95/0.8013 | 27.42/0.8359 | - |
| CARN-M [26] | ×3 | 412 | 33.99/0.9236 | 30.08/0.8367 | 28.91/0.8000 | 26.86/0.8263 | - |
| AWSRN-S [12] | ×3 | 447 | 34.02/0.9240 | 30.09/0.8376 | 28.92/0.8009 | 27.57/0.8391 | 32.82/0.9393 |
| ESRN-V [15] | ×3 | 324 | 34.23/0.9262 | 30.27/0.8400 | 29.03/0.8039 | 27.95/0.8481 | - |
| WMRN [21] | ×3 | 556 | 34.11/0.9251 | 30.17/0.8390 | 28.98/0.8021 | 27.80/0.8448 | 33.07/0.9413 |
| MADNet-L1 [19] | ×3 | 930 | 34.16/0.9253 | 30.21/0.8398 | 28.98/0.8023 | 27.77/0.8439 | - |
| MSICF [51] | ×3 | 1900 | 34.24/0.9266 | 30.09/0.8371 | 29.01/0.8024 | 27.69/0.8411 | - |
| CFSRCNN [22] | ×3 | 1495 | 34.24/0.9256 | 30.27/0.8410 | 29.03/0.8035 | 28.04/0.8496 | - |
| AIDN(ours) | ×3 | 742 | 34.35/0.9259 | 30.35/0.8413 | 29.07/0.8039 | 28.13/0.8512 | 33.50/0.9433 |
| SRCNN [5] | ×4 | 57 | 30.48/0.8628 | 27.49/0.7503 | 26.90/0.7101 | 24.52/0.7221 | 27.66/0.8505 |
| VDSR [6] | ×4 | 665 | 31.35/0.8838 | 28.01/0.7674 | 27.29/0.7251 | 25.18/0.7524 | 28.83/0.8809 |
| LapSRN [20] | ×4 | 813 | 31.54/0.8850 | 28.19/0.7720 | 27.32/0.7280 | 25.21/0.7560 | 29.09/0.8845 |
| IDN [18] | ×4 | 590 | 31.82/0.8903 | 28.25/0.7730 | 27.41/0.7297 | 25.41/0.7632 | - |
| CARN-M [26] | ×4 | 412 | 31.92/0.8903 | 28.42/0.7762 | 27.44/0.7304 | 25.63/0.7688 | - |
| AWSRN-S [12] | ×4 | 588 | 31.77/0.8893 | 28.35/0.7761 | 27.41/0.7304 | 25.56/0.7678 | 29.74/0.8982 |
| ESRN-V [15] | ×4 | 324 | 31.99/0.8919 | 28.49/0.7779 | 27.50/0.7331 | 25.87/0.7782 | - |
| WMRN [21] | ×4 | 536 | 32.00/0.8925 | 28.47/0.7786 | 27.49/0.7328 | 25.89/0.7789 | 30.11/0.9040 |
| MADNet-L1 [19] | ×4 | 1002 | 31.95/0.8917 | 28.44/0.7780 | 27.47/0.7327 | 25.76/0.7746 | - |
| MSICF [51] | ×4 | 1900 | 31.91/0.8923 | 28.35/0.7751 | 27.46/0.7308 | 25.64/0.7692 | - |
| CFSRCNN [22] | ×4 | 1458 | 32.06/0.8920 | 28.57/0.7800 | 27.53/0.7333 | 26.03/0.7824 | - |
| AIDN(ours) | ×4 | 754 | 32.17/0.8939 | 28.61/0.7806 | 27.55/0.7344 | 26.04/0.7833 | 30.42/0.9065 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zang, H.; Zhao, Y.; Niu, C.; Zhang, H.; Zhan, S. Attention Network with Information Distillation for Super-Resolution. Entropy 2022, 24, 1226. https://doi.org/10.3390/e24091226
Zang H, Zhao Y, Niu C, Zhang H, Zhan S. Attention Network with Information Distillation for Super-Resolution. Entropy. 2022; 24(9):1226. https://doi.org/10.3390/e24091226
Chicago/Turabian StyleZang, Huaijuan, Ying Zhao, Chao Niu, Haiyan Zhang, and Shu Zhan. 2022. "Attention Network with Information Distillation for Super-Resolution" Entropy 24, no. 9: 1226. https://doi.org/10.3390/e24091226
APA StyleZang, H., Zhao, Y., Niu, C., Zhang, H., & Zhan, S. (2022). Attention Network with Information Distillation for Super-Resolution. Entropy, 24(9), 1226. https://doi.org/10.3390/e24091226