
Uniform Finite Element Error Estimates with Power-Type Asymptotic Constants for Unsteady Navier–Stokes Equations


{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Functional Setting
3. Long-Time Stability Analysis
3.1. Auxiliary Problem
- (I).
- It is validwhere .
- (II).
- Ifand we choose a function that satisfies and , then it holds that
- (III).
- Under the assumptions of (II) and choosing a function satisfying , it holds thatHereafter, κ is a general power-type positive constant that may take different values at different occurrences.
3.2. Long-Time Stability for the NSE
- (I).
- It is valid that
- (II).
- (III).
- Under the assumptions in II) and choosing an iterative initial guess satisfying , it holds that
4. Long-Time Error Estimate
4.1. Stability for Finite Element Solution
4.2. Error Estimate
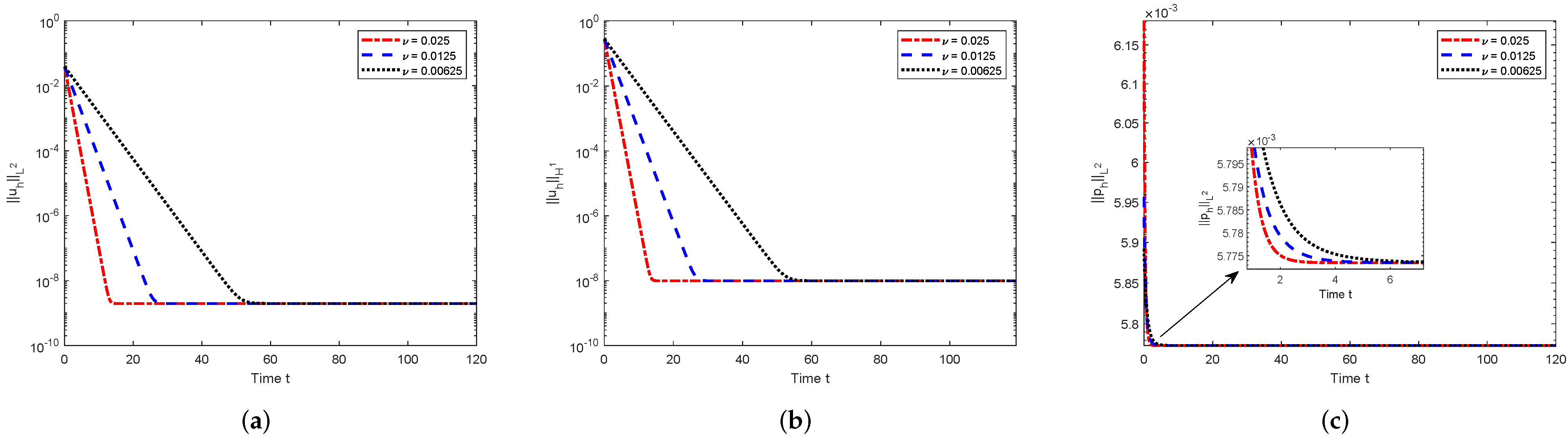
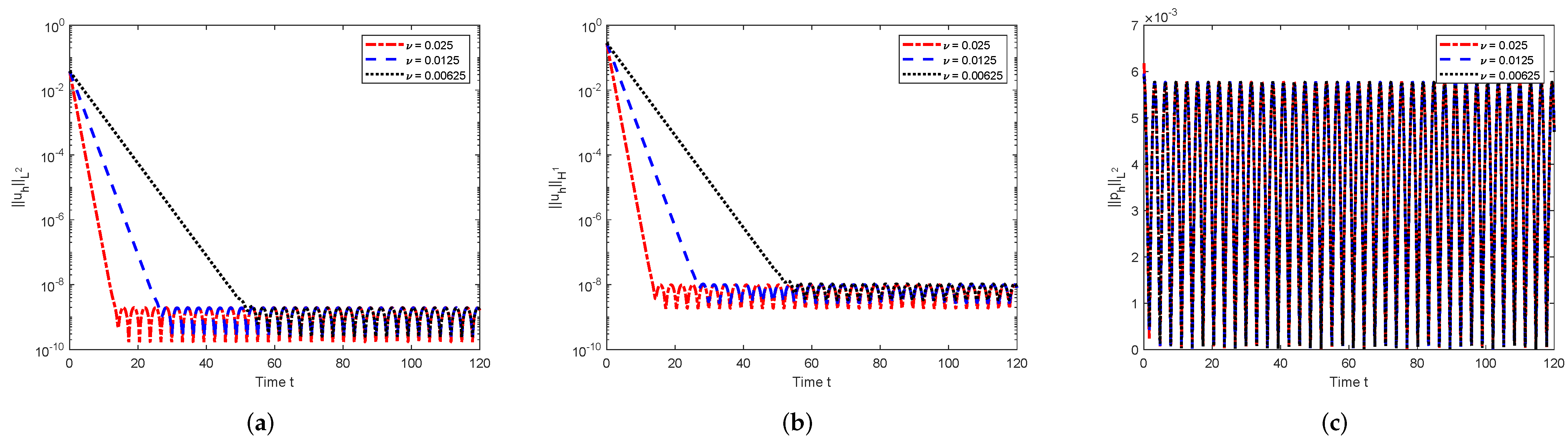
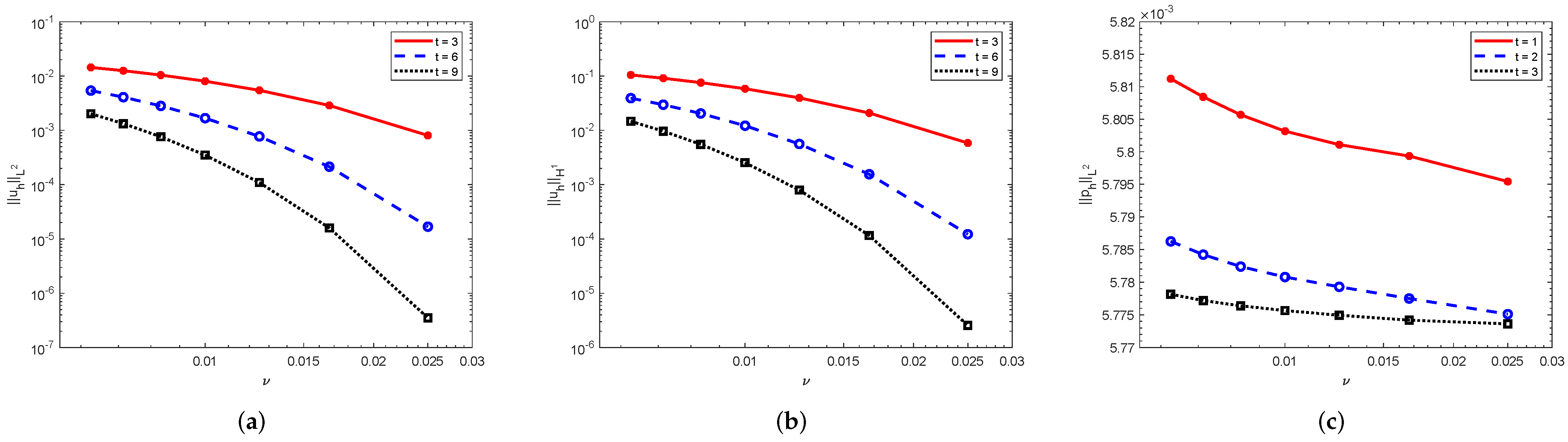
5. Numerical Examples
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Heywood, J.; Rannacher, R. Finite element approximation of the nonstationary Navier-Stokes problem. I. Regularity of solutions and second-order error estimates for spatial discretization. SIAM J. Numer. Anal. 1982, 19, 275–310. [Google Scholar] [CrossRef]
- Heywood, J.; Rannacher, R. Finite element approximation of the nonstationary Navier-Stokes equations, II. Stability of solutions and error estimates uniform in time. SIAM J. Numer. Anal. 1986, 23, 750–777. [Google Scholar] [CrossRef]
- He, Y.; Lin, Y.; Sun, W. Stabilized finite element method for the non-stationary Navier-Stokes problem. Discret. Contin. Dyn. Sys.-Ser. B 2006, 6, 41–68. [Google Scholar] [CrossRef]
- He, Y. Stability and error analysis for spectral Galerkin method for the Navier-Stokes equations with L2 initial data. Numer. Methods Part. Diff. Equ. 2008, 24, 79–103. [Google Scholar] [CrossRef]
- He, Y.; Lin, Y.; Shen, S.; Sun, W.; Tait, R. Finite element approximation for the viscoelastic fluid motion problem. J. Comput. Appl. Math. 2003, 155, 201–222. [Google Scholar] [CrossRef][Green Version]
- Wang, K.; Lin, Y.; He, Y. Asymptotic analysis of the equations of motion for viscoelastic Oldroyd fluid. Discete Contin. Dyn. Sys.-Ser. A 2012, 32, 657–677. [Google Scholar] [CrossRef]
- Wang, K.; He, Y.; Lin, Y. Long time numerical stability and asymptotic analysis for the viscoelastic Oldroyd flows. Discete Contin. Dyn. Sys.-Ser. B 2012, 17, 1551–1573. [Google Scholar] [CrossRef]
- Simo, J.; Armero, F. Unconditional stability and long-term behavior of transient algorithms for the incompressible Navier-Stokes and Euler equations. Comput. Methods Appl. Mech. Eng. 1994, 111, 111–154. [Google Scholar] [CrossRef]
- He, Y.; Li, K. Asymptotic behavior and time discretization analysis for the non-stationary Navier-Stokes problem. Numer. Math. 2004, 98, 647–673. [Google Scholar] [CrossRef]
- He, Y. Euler implicit/explicit iterative scheme for the stationary Navier-Stokes equations. Numer. Math. 2013, 123, 67–96. [Google Scholar] [CrossRef]
- Tone, F.; Wirosoetisno, D. On the long-time stability of the implicit Euler scheme for the two-dimensional Navier-Stokes equations. SIAM J. Numer. Anal. 2006, 44, 29–40. [Google Scholar] [CrossRef]
- Tone, F. On the long-time stability of the Crank-Nicolson scheme for the 2D Navier-Stokes equations. Numer. Methods Partial Differ. Equ. 2007, 23, 1235–1248. [Google Scholar] [CrossRef]
- Breckling, S.; Shield, S. The long-time L2 and H1 stability of linearly extrapolated second-order time-stepping schemes for the 2D incompressible Navier-Stokes equations. Appl. Math. Comput. 2019, 342, 263–279. [Google Scholar] [CrossRef]
- Ngondiep, E. Long time unconditional stability of a two-level hybrid method for nonstationary incompressible Navier-Stokes equations. J. Comput. Appl. Math. 2019, 345, 501–514. [Google Scholar] [CrossRef]
- Akbas, M.; Kaya, S.; Rebholz, L.G. On the stability at all times of linearly extrapolated BDF2 timestepping for multiphysics incompressible flow problems. Numer. Methods Part. Diff. Equ. 2017, 33, 999–1017. [Google Scholar] [CrossRef]
- Cibik, A.; Eroglu, F.G.; Kaya, S. Long time stability of a linearly extrapolated blended BDF scheme for multiphysics flows. Int. J. Numer. Aanl. Model. 2020, 17, 24–41. [Google Scholar]
- Olshanskii, M.A.; Rebholz, L.G. Longer time accuracy for incompressible Navier-Stokes simulations with the EMAC formulation. Comput. Methods Appl. Mech. Eng. 2020, 372, 113369. [Google Scholar] [CrossRef]
- Tone, F.; Wang, X.; Wirosoetisno, D. Long-time dynamics of 2d double-diffusive convection: Analysis and/of numerics. Numer. Math. 2015, 130, 541–566. [Google Scholar] [CrossRef]
- Gottlieb, S.; Tone, F.; Wang, C.; Wang, X.; Wirosoetisno, D. Long time stability of a classical efficient scheme for two-dimensional Navier-Stokes equations. SIAM J. Numer. Anal. 2012, 50, 126–150. [Google Scholar] [CrossRef]
- Cheng, K.; Wang, C. Long time stbility of high order multistep numerical schemes for two-dimensional incompressible Navier-Stokes equations. SIAM J. Numer. Anal. 2016, 54, 3123–3144. [Google Scholar] [CrossRef]
- Layton, W.; Manica, C.C.; Neda, M.; Olshanskii, M.; Rebholz, L.G. On the accuracy of the rotation form in simulations of the Navier–Stokes equations. J. Comput. Phys. 2009, 228, 3433–3447. [Google Scholar] [CrossRef]
- Charnyi, S.; Heistera, T.; Olshanskiib, M.A.; Rebholza, L.G. On conservation laws of Navier–Stokes Galerkin discretizations. J. Comput. Phys. 2017, 337, 289–308. [Google Scholar] [CrossRef]
- Yang, D.; He, Y.; Zhang, Y. Analysis and computation of a pressure-robust method for the rotation form of the incompressible Navier–Stokes equations with high-order finite elements. Comput. Math. Appl. 2022, 112, 1–22. [Google Scholar] [CrossRef]
- Heister, T.; Olshanskii, M.A.; Rebholz, L.G. Unconditional long-time stability of a velcocity-vorticity method for the 2D Navier-Stokes equations. Numer. Math. 2017, 135, 143–167. [Google Scholar] [CrossRef]
- Xie, C.; Wang, K. Viscosity explicit analysis for finite element methods of time-dependent Navier-Stokes equations. J. Comput. Appl. Math. 2021, 392, 113481. [Google Scholar] [CrossRef]
- Girault, V.; Raviart, P. Finite Element Method for Navier-Stokes Equations: Theory and Algorithms; Springer: Berlin/Heidelberg, Germany, 1986. [Google Scholar]
- Temam, R. Navier-Stokes Equations, Theory and Numerical Analysis; North-Holland: Amsterdam, The Netherlnads, 1984. [Google Scholar]
- Ciarlet, P. The Finite Element Method for Elliptic Problems; North-Holland: Amsterdam, The Netherlnads, 1978. [Google Scholar]
- Hill, A.D.; Süli, S. Approximation of the global attractor for the incompressible Navier-Stokes equations. IMA J. Numer. Anal. 2000, 20, 633–667. [Google Scholar] [CrossRef]
- He, Y.; Wang, A. A simplified two-level method for the steady Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 2008, 197, 1568–1576. [Google Scholar] [CrossRef]
- He, Y.; Li, J. Convergence of three iterative methods based on the finite element discretization for the stationary Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 2009, 198, 1351–1359. [Google Scholar] [CrossRef]
- Xu, H.; He, Y. Some iterative finite element methods for steady Navier-Stokes equations with different viscosities. J. Comput. Phys. 2013, 232, 136–152. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, C.; Wang, K. Uniform Finite Element Error Estimates with Power-Type Asymptotic Constants for Unsteady Navier–Stokes Equations. Entropy 2022, 24, 948. https://doi.org/10.3390/e24070948
Xie C, Wang K. Uniform Finite Element Error Estimates with Power-Type Asymptotic Constants for Unsteady Navier–Stokes Equations. Entropy. 2022; 24(7):948. https://doi.org/10.3390/e24070948
Chicago/Turabian StyleXie, Cong, and Kun Wang. 2022. "Uniform Finite Element Error Estimates with Power-Type Asymptotic Constants for Unsteady Navier–Stokes Equations" Entropy 24, no. 7: 948. https://doi.org/10.3390/e24070948
APA StyleXie, C., & Wang, K. (2022). Uniform Finite Element Error Estimates with Power-Type Asymptotic Constants for Unsteady Navier–Stokes Equations. Entropy, 24(7), 948. https://doi.org/10.3390/e24070948