
Numerical Study on an RBF-FD Tangent Plane Based Method for Convection–Diffusion Equations on Anisotropic Evolving Surfaces

Abstract
:1. Introduction
2. Convection–Diffusion Equation on Evolving Surfaces
3. ARBF-FD TPM for the Convection–Diffusion Equation on Evolving Surfaces
3.1. Anisotropic Radial Basis Function Interpolation
3.2. Differentiation Weights Based on TPM
4. Discretization in Time
5. Differentiation Accuracy
5.1. On the Choice of the Matrix M
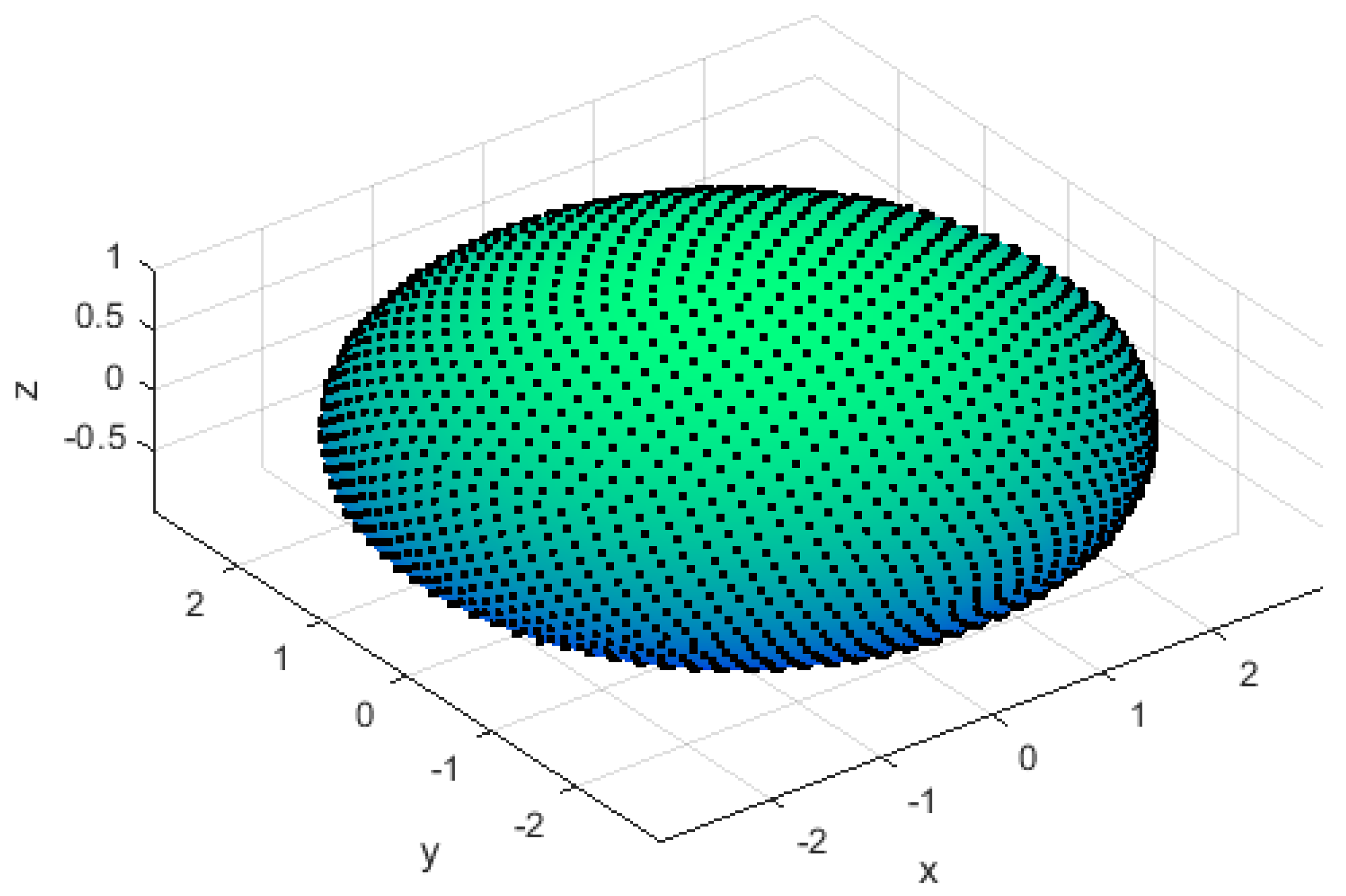
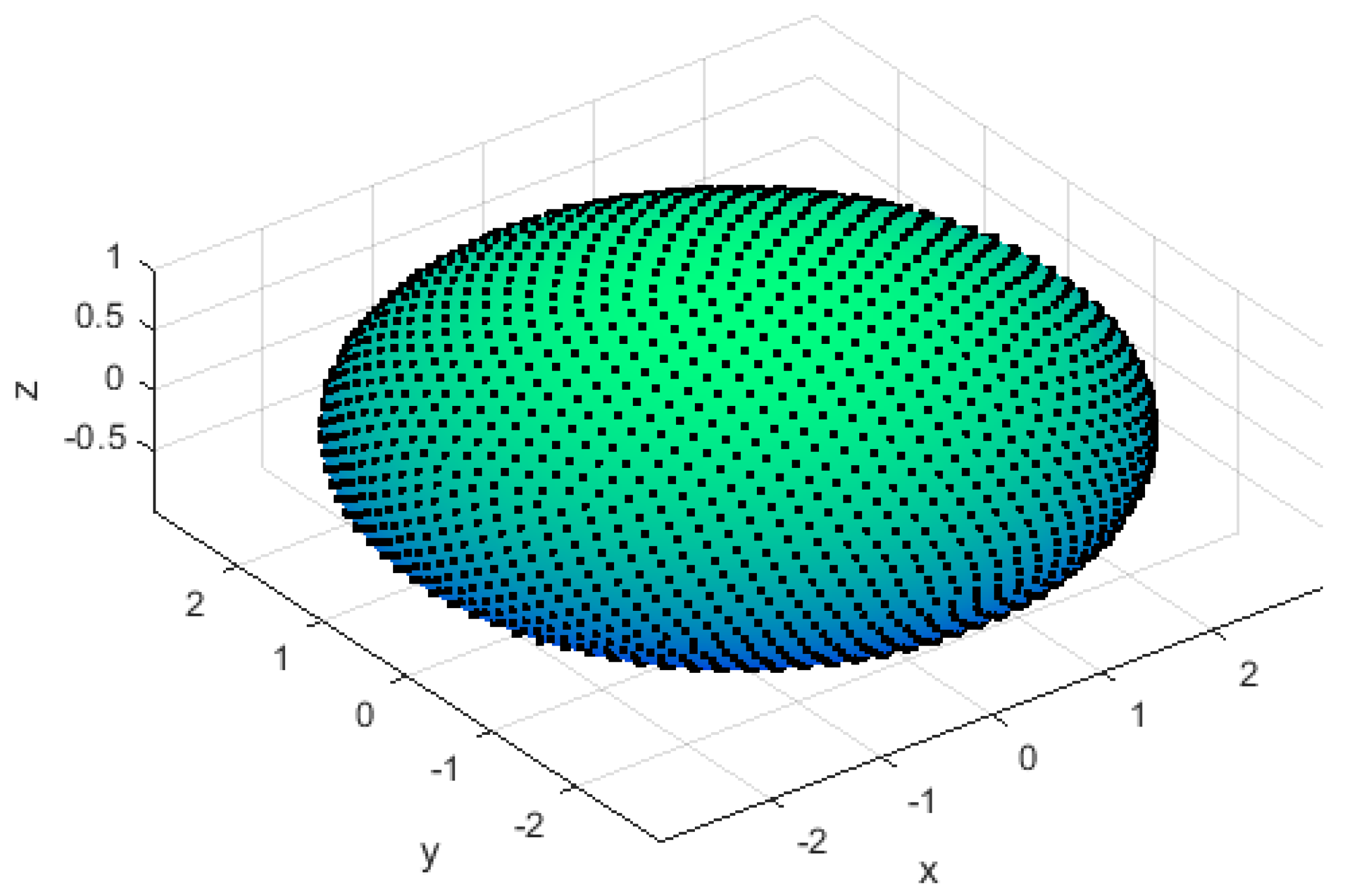
5.2. Results on the Ellipsoid
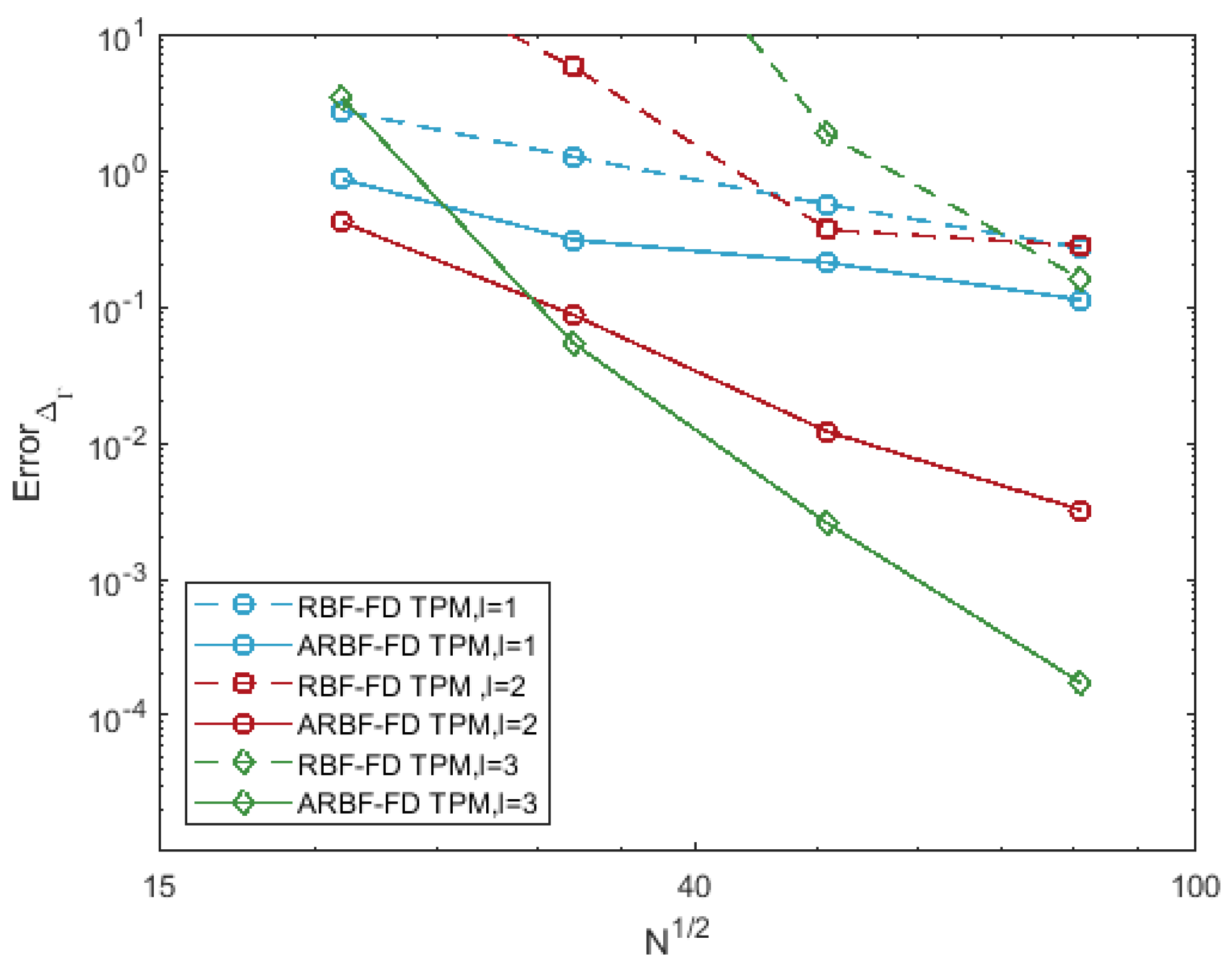
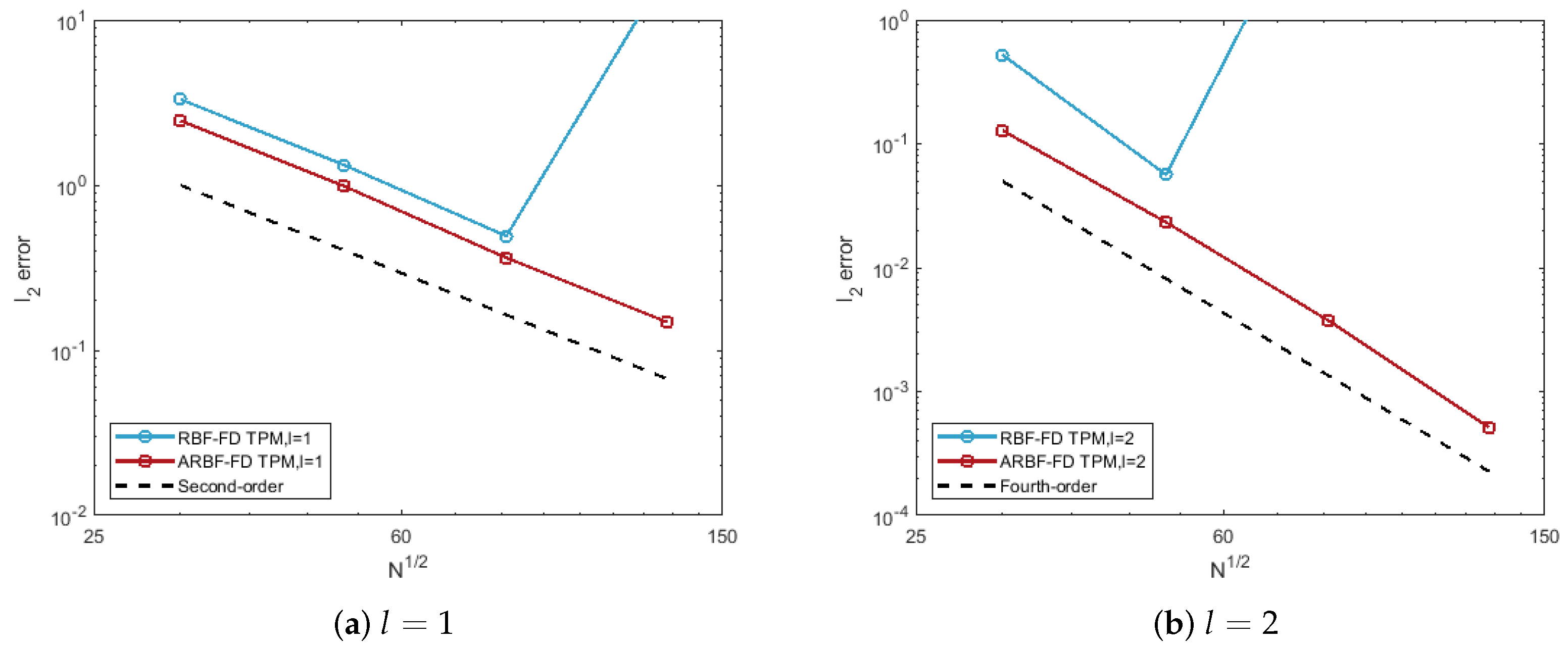
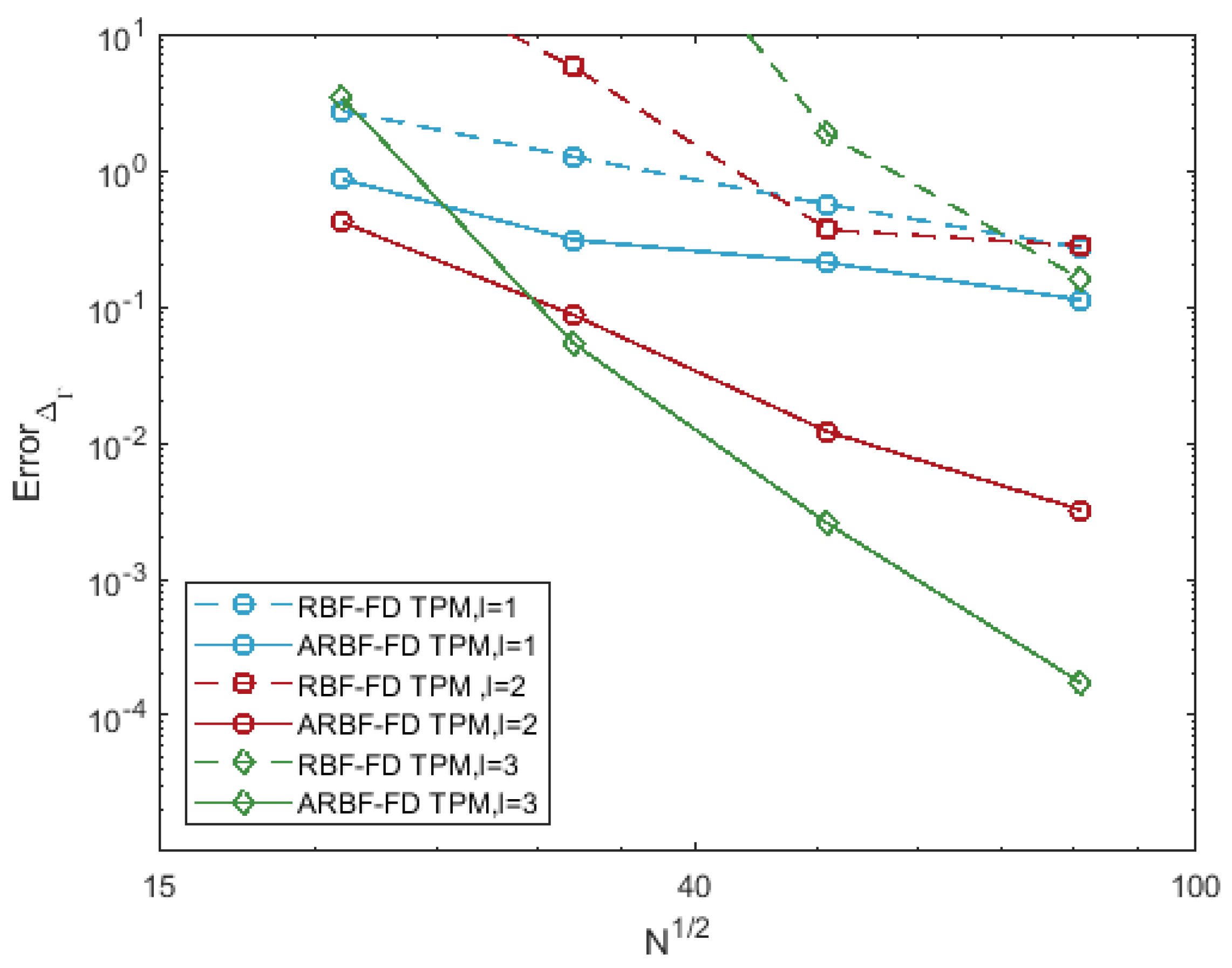
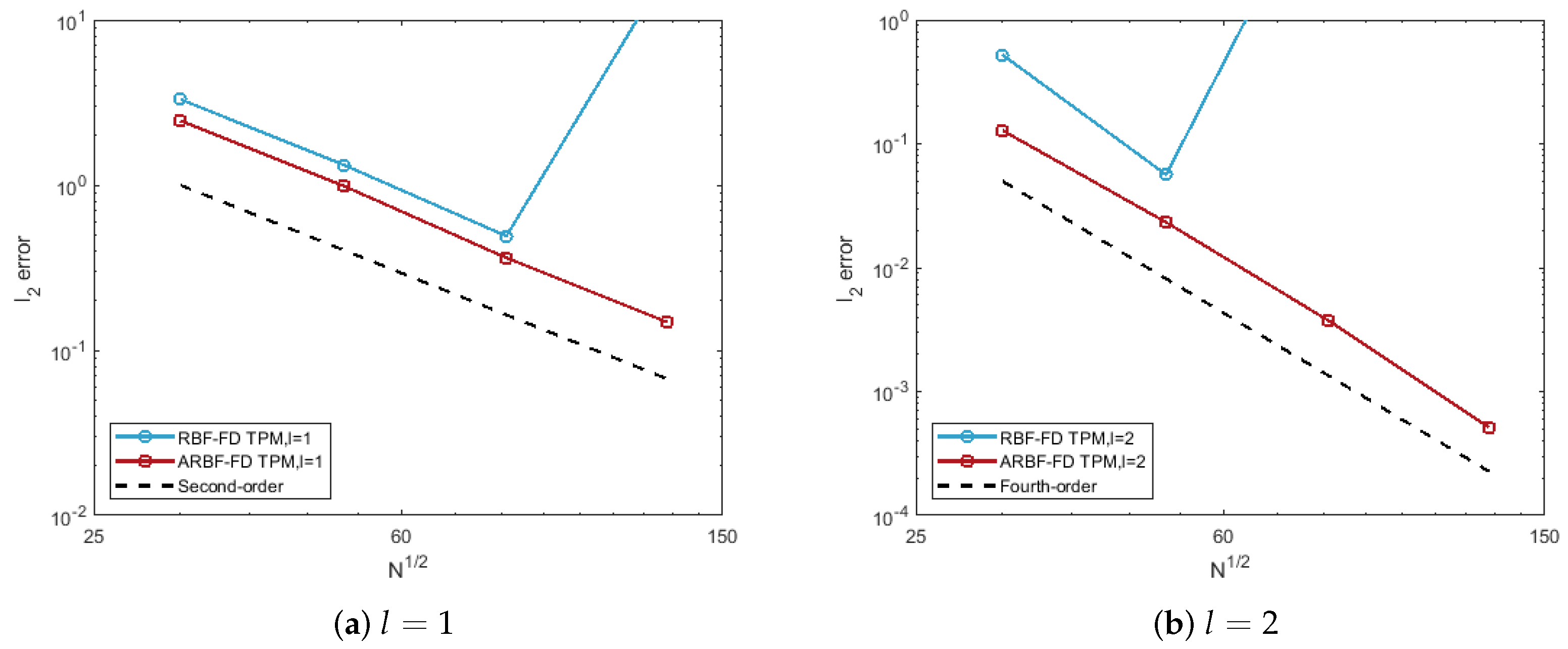
- The errors of the RBF-FD TPM are relatively large. The reason for this is that the irregularity of nodes leads to poor RBF interpolation. The irregularity of nodes is reflected by the difference between the fill distance and separation distance. For convenience, the fill distance in (5) is approximated byFor 6561 nodes on the ellipsoid, and , the difference between the two quantities is relatively large;
- The ARBF-FD TPM has smaller errors and faster convergence rates than those of RBF-FD TPM. The -matrix maps the nodes on the ellipsoid to the near-uniform ME nodes on the unit sphere. The corresponding two distances of the transformed nodes set are and . We obtained better results by introducing a new distance to reduce the difference between these two quantities. The convergence orders are 1.43, 3.67 and 6.19 for different l, respectively.
6. Numerical Experiments
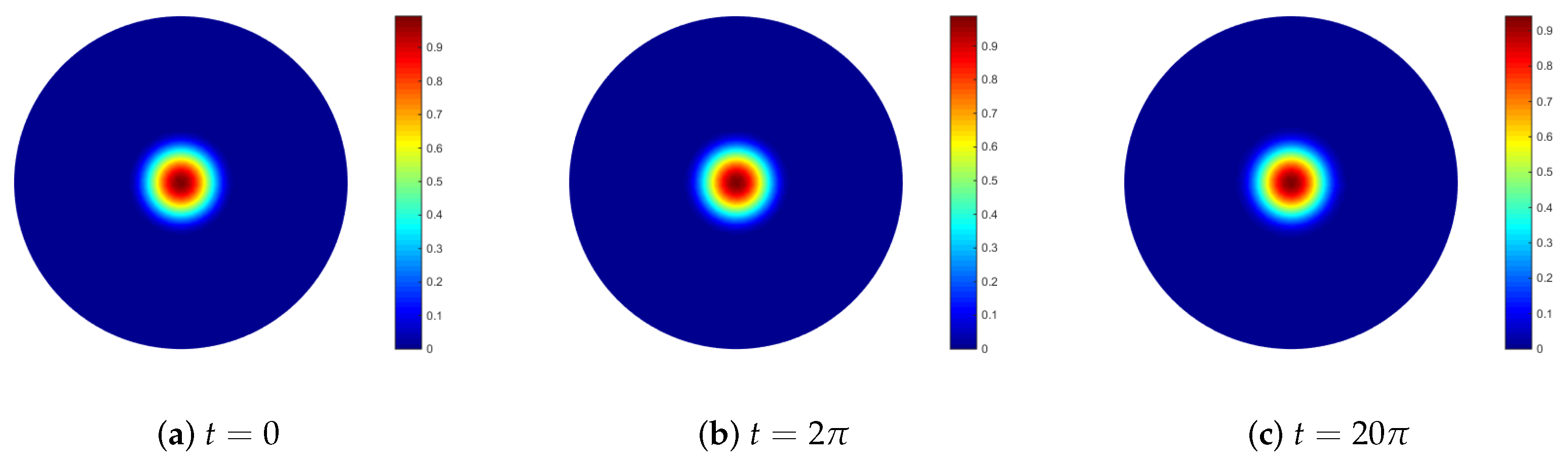
6.1. Normal and Tangential Motion on the Unit Sphere
6.1.1. Expanding Sphere
6.1.2. Rotating Sphere
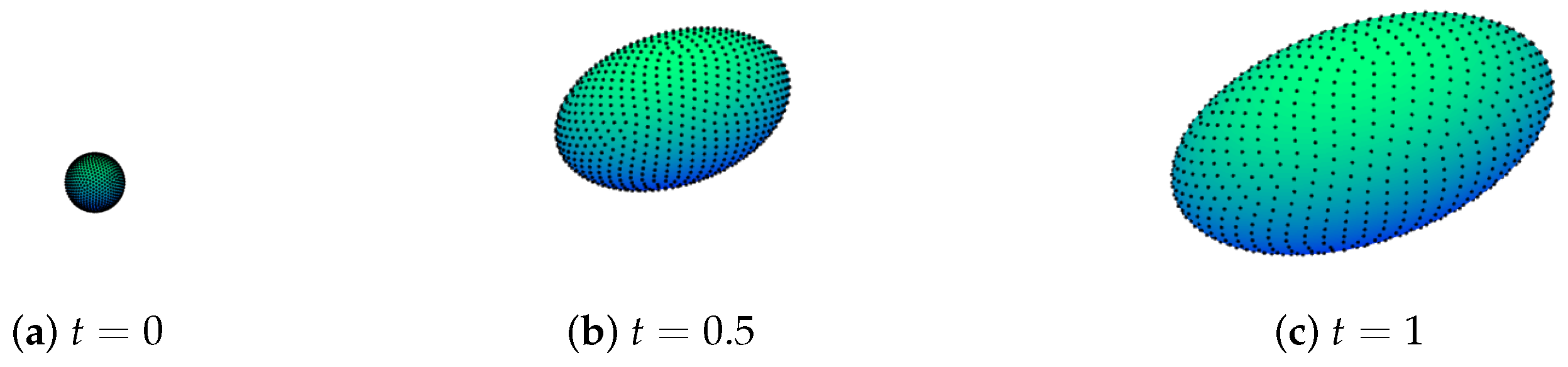
6.2. Evolving Ellipsoid
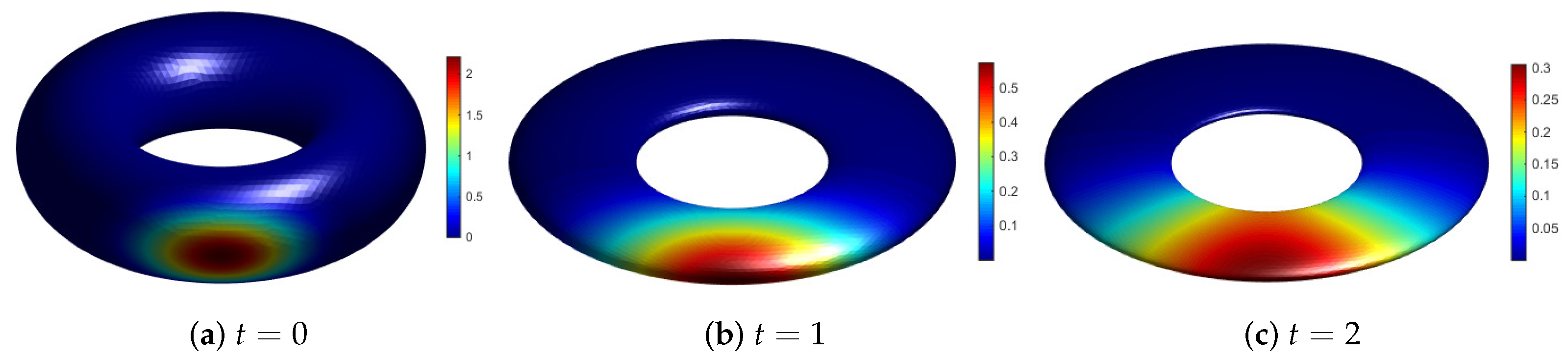
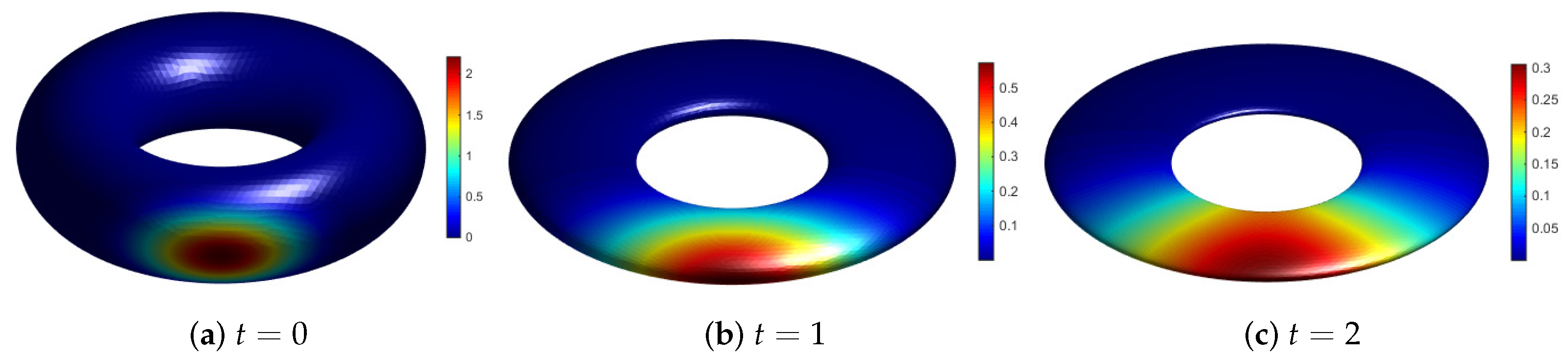
6.3. Evolving Torus
6.4. Solid Tumor Growth
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bayona, V.; Flyer, N.; Lucas, G.M.; Baumgaertner, A.J. A 3-D RBF-FD solver for modeling the atmospheric global electric circuit with topography (GEC-RBFFD v1.0). Geosci. Model. Dev. 2015, 8, 3007–3020. [Google Scholar] [CrossRef] [Green Version]
- Chaplain, M.; Ganesh, M.; Graham, G. Spatio-temporal pattern formation on spherical surfaces: Numerical simulation and application to solid tumour growth. J. Math. Biol. 2001, 42, 387–423. [Google Scholar] [CrossRef] [PubMed]
- Barreira, R.; Elliott, C.M.; Madzvamuse, A. The surface finite element method for pattern formation on evolving biological surfaces. J. Math. Biol. 2011, 63, 1095–1119. [Google Scholar] [CrossRef] [PubMed]
- Madzvamuse, A.; Barreira, R. Exhibiting cross-diffusion-induced patterns for reaction-diffusion systems on evolving domains and surfaces. Phys. Rev. E 2014, 90, 043307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dziuk, G.; Elliott, C.M. Surface finite elements for parabolic equations. J. Comput. Math. 2007, 25, 385–407. [Google Scholar]
- Dziuk, G.; Elliott, C.M. Finite element methods for surface PDEs. Acta. Numer. 2013, 22, 289–396. [Google Scholar] [CrossRef] [Green Version]
- Dziuk, G.; Elliott, C.M. Finite elements on evolving surfaces. IMA J. Numer. Anal. 2007, 27, 262–292. [Google Scholar] [CrossRef]
- Eilks, C.; Elliott, C.M. Numerical simulation of dealloying by surface dissolution via the evolving surface finite element method. J. Comput. Phys. 2008, 227, 9727–9741. [Google Scholar]
- Fuselier, E.J.; Wright, G. A high-order kernel method for diffusion and reaction-diffusion equations on surfaces. J. Sci. Comput. 2013, 56, 535–565. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Zhai, S.; Weng, Z.; Feng, X. H-adaptive RBF-FD method for the high-dimensional convection-diffusion equation. Int. Commun. Heat Mass Transf. 2017, 89, 139–146. [Google Scholar] [CrossRef]
- Li, J.; Gao, Z.; Feng, X. Method of order reduction for the high-dimensional convection-diffusion-reaction equation with Robin boundary conditions based on MQ RBF-FD. Int. J. Comp. Methods 2020, 17, 1950058. [Google Scholar] [CrossRef] [Green Version]
- Shankar, V.; Wright, G.; Kirby, R.M.; Fogelson, A.L. A radial basis function (RBF)—Finite difference (FD) method for diffusion and reaction-diffusion equations on surfaces. J. Sci. Comput. 2015, 63, 745–768. [Google Scholar] [CrossRef] [PubMed]
- Sokolov, A.; Davydov, O.; Kuzmin, D.; Westermann, A.; Turek, S. A flux-corrected RBF-FD method for convection dominated problems in domains and on manifolds. J. Numer. Math. 2019, 27, 253–269. [Google Scholar] [CrossRef]
- Zhao, F.; Li, J.; Xiao, X.; Feng, X. The characteristic RBF-FD method for the convection-diffusion-reaction equation on implicit surfaces. Numer. Heat Transf. A-Appl. 2019, 75, 548–559. [Google Scholar] [CrossRef]
- Shankar, V.; Wright, G.B.; Narayan, A. A robust hyperviscosity formulation for stable RBF-FD discretizations of advection-diffusion-reaction equations on manifolds. SIAM J. Sci. Comput. 2020, 42, A2371–A2401. [Google Scholar] [CrossRef]
- Wendland, H.; Künemund, J. Solving partial differential equations on (evolving) surfaces with radial basis functions. Adv. Comput. Math. 2020, 46, 46–64. [Google Scholar] [CrossRef]
- Petras, A.; Ling, L.; Piret, C.M.; Ruuth, S.J. A least-squares implicit RBF-FD closest point method and applications to PDEs on moving surfaces. J. Comput. Phys. 2019, 381, 146–161. [Google Scholar] [CrossRef] [Green Version]
- Demanet, L. Painless, Highly Accurate Discretizations of the Laplacian on a Smooth Manifold; Technical Report; Stanford University: Stanford, CA, USA, 2006. [Google Scholar]
- Suchde, P.; Kuhnert, J. A meshfree generalized finite difference method for surface PDEs. Comput. Math. Appl. 2019, 78, 2789–2805. [Google Scholar] [CrossRef] [Green Version]
- Suchde, P.; Kuhnert, J. A fully Lagrangian meshfree framework for PDEs on evolving surfaces. J. Comput. Phys. 2019, 395, 38–59. [Google Scholar] [CrossRef] [Green Version]
- Shaw, S.B. Radial Basis Function Finite Difference Approximations of the Laplace-Beltrami Operator. Master’s Thesis, Boise State University, Boise, ID, USA, 2019. [Google Scholar]
- Casciola, G.; Montefusco, L.B.; Morigi, S. The regularizing properties of anisotropic radial basis functions. Appl. Math. Comput. 2007, 190, 1050–1062. [Google Scholar] [CrossRef]
- Beatson, R.; Davydov, O.; Levesley, J. Error bounds for anisotropic RBF interpolation. J. Approx. Theory 2010, 162, 512–527. [Google Scholar] [CrossRef] [Green Version]
- Casciola, G.; Lazzaro, D.; Montefusco, L.B.; Morigi, S. Shape preserving surface reconstruction using locally anisotropic radial basis function interpolants. Comput. Math. Appl. 2006, 51, 1185–1198. [Google Scholar] [CrossRef] [Green Version]
- Fornberg, B.; Piret, C. A stable algorithm for flat radial basis functions on a sphere. SIAM J. Sci. Comput. 2007, 30, 60–80. [Google Scholar] [CrossRef] [Green Version]
- Larsson, E.; Lehto, E.; Heryudono, A.; Fornberg, B. Stable computation of differentiation matrices and scattered node stencils based on Gaussian radial basis functions. SIAM J. Sci. Comput. 2013, 35, 2096–2119. [Google Scholar] [CrossRef] [Green Version]
- ÁLvarez, D.; González-Rodríguez, P.; Moscoso, M. A closed-form formula for the RBF-based approximation of the Laplace-Beltrami operator. J. Sci. Comput. 2018, 77, 1115–1132. [Google Scholar] [CrossRef] [Green Version]
- ÁLvarez, D.; González-Rodríguez, P.; Kindelan, M. A local radial basis function method for the Laplace-Beltrami operator. J. Sci. Comput. 2021, 86, 28–48. [Google Scholar] [CrossRef]
- Gunderman, D.; Flyer, N.; Fornberg, B. Transport schemes in spherical geometries using spline-based RBF-FD with polynomials. J. Comput. Phys. 2020, 408, 109256. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | l | n | |
|---|---|---|---|
| ① | 1 | 9 | 1 |
| ② | 2 | 21 | 2 |
| Distance | |||
|---|---|---|---|
| 5.9378 × 10 | 1.2999 × 10 | 2.0258 × 10 | |
| 5.3421 × 10 | 8.5483 × 10 | 1.1430 × 10 |
| Distance | |||
|---|---|---|---|
| 2.8538 × 10 | 2.7508 × 10 | 2.7501 × 10 | |
| 2.1260 × 10 | 7.8858 × 10 | 4.7380 × 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adil, N.; Xiao, X.; Feng, X. Numerical Study on an RBF-FD Tangent Plane Based Method for Convection–Diffusion Equations on Anisotropic Evolving Surfaces. Entropy 2022, 24, 857. https://doi.org/10.3390/e24070857
Adil N, Xiao X, Feng X. Numerical Study on an RBF-FD Tangent Plane Based Method for Convection–Diffusion Equations on Anisotropic Evolving Surfaces. Entropy. 2022; 24(7):857. https://doi.org/10.3390/e24070857
Chicago/Turabian StyleAdil, Nazakat, Xufeng Xiao, and Xinlong Feng. 2022. "Numerical Study on an RBF-FD Tangent Plane Based Method for Convection–Diffusion Equations on Anisotropic Evolving Surfaces" Entropy 24, no. 7: 857. https://doi.org/10.3390/e24070857
APA StyleAdil, N., Xiao, X., & Feng, X. (2022). Numerical Study on an RBF-FD Tangent Plane Based Method for Convection–Diffusion Equations on Anisotropic Evolving Surfaces. Entropy, 24(7), 857. https://doi.org/10.3390/e24070857