
Age Analysis of Status Updating System with Probabilistic Packet Preemption



Abstract
:1. Introduction
1.1. Related Work
1.2. Discussion of Existing Methods
1.3. Analysis of Discrete Time AoI: Idea and Methods
- (1)
- Calculation: reducing the complexity
- (2)
- Generalization: In terms of system structure and service time distribution
1.4. The Work in the Current Paper
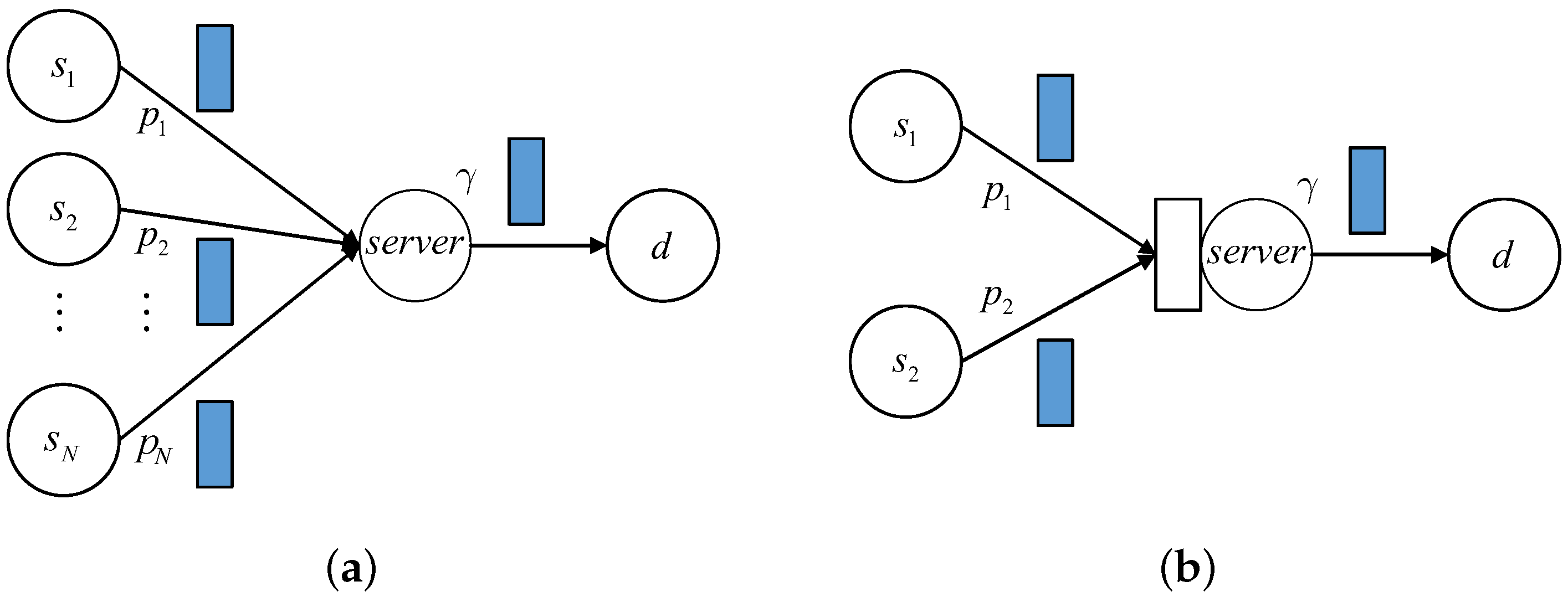
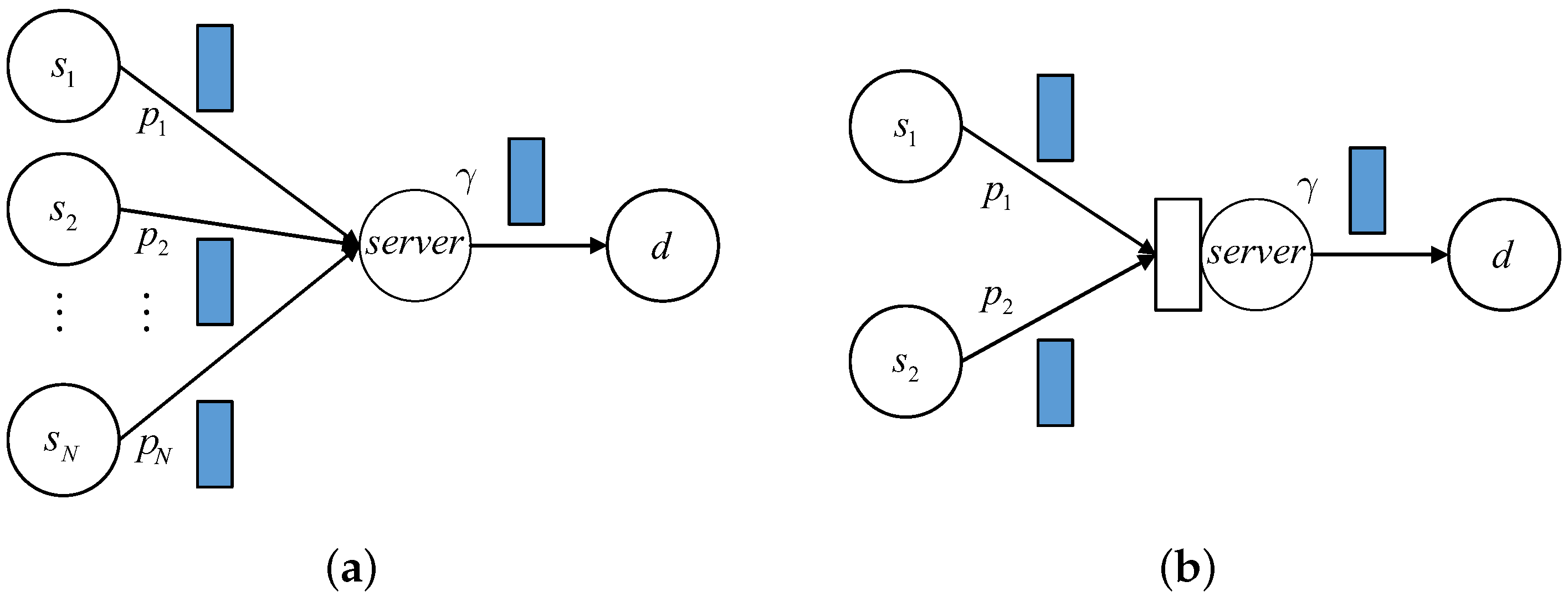
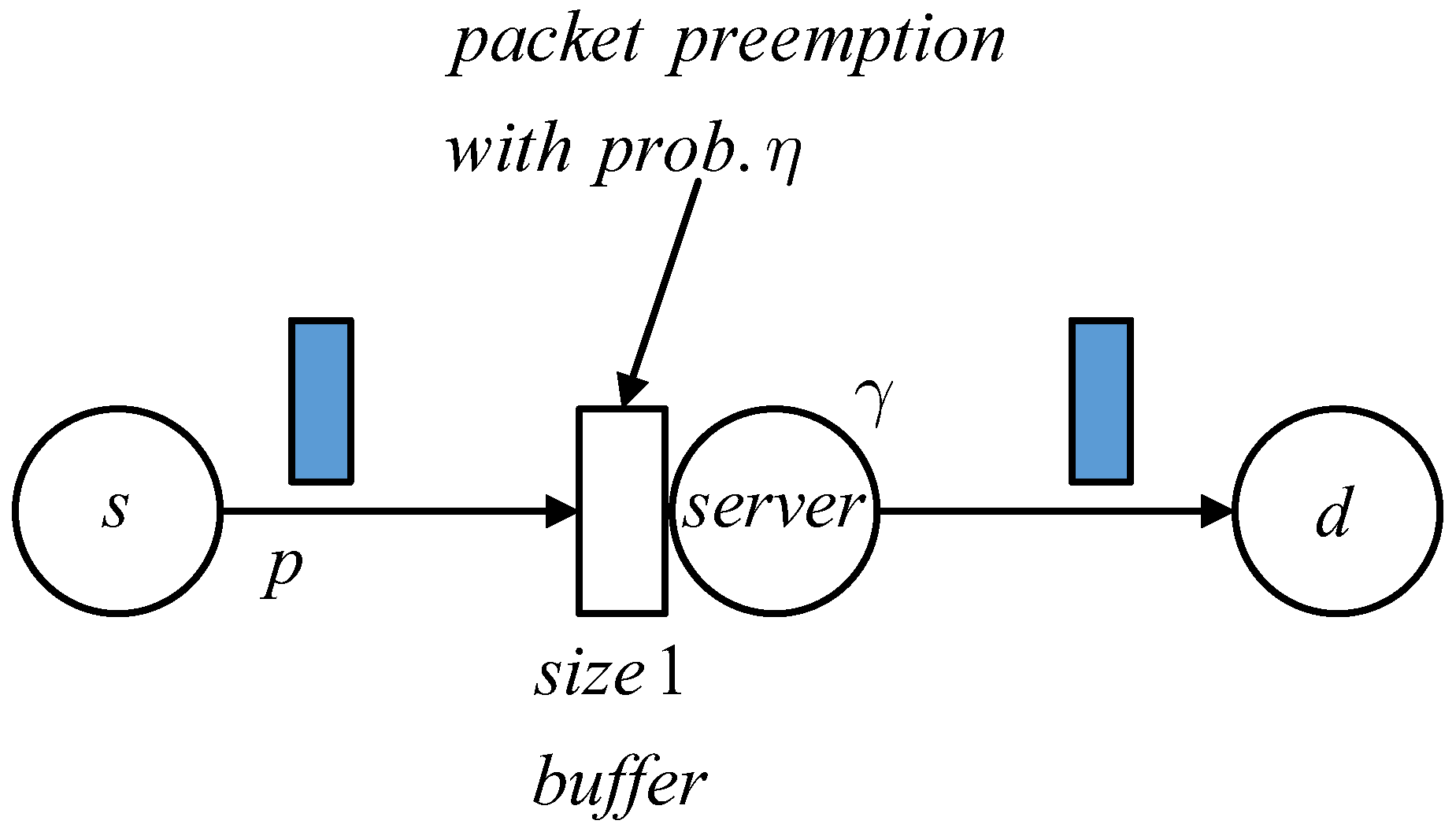
2. System Model and Problem Formulation
3. AoI Analysis for Status Updating System with Probabilistic Packet Preemption
4. Stationary Age of Information under Two Extreme Cases
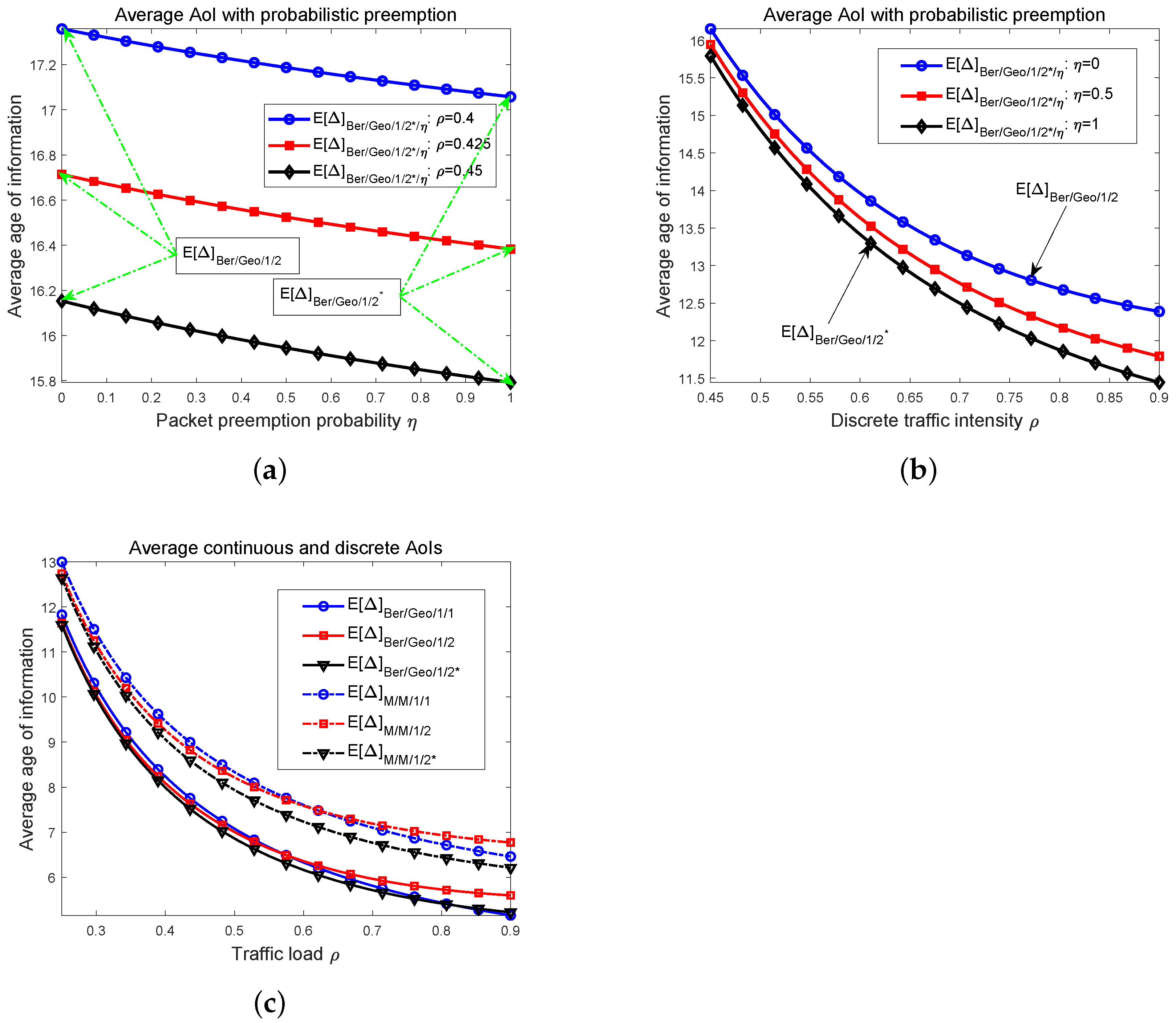
5. Numerical Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Proof of Theorem 1
Appendix B. Proof of Equations (41) and (42)
Appendix C. Factorization of Last Part of Equation (42)
References
- Kaul, S.; Gruteser, M.; Rai, V.; Kenney, J. Minimizing age of information in vehicular networks. In Proceedings of the 2011 8th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, Salt Lake City, UT, USA, 27–30 June 2011; pp. 350–358. [Google Scholar] [CrossRef] [Green Version]
- Kosta, A.; Pappas, N.; Angelakis, V. Age of Information: A New Concept, Metric, and Tool. Found. Trends Netw. 2017, 12, 162–259. [Google Scholar] [CrossRef] [Green Version]
- Yates, R.D.; Sun, Y.; Brown, D.R.; Kaul, S.K.; Modiano, E.; Ulukus, S. Age of Information: An Introduction and Survey. IEEE J. Sel. Areas Commun. 2021, 39, 1183–1210. [Google Scholar] [CrossRef]
- Kaul, S.; Yates, R.; Gruteser, M. Real-time status: How often should one update? In Proceedings of the 2012 Proceedings IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012; pp. 2731–2735. [Google Scholar] [CrossRef] [Green Version]
- Inoue, Y.; Masuyama, H.; Takine, T.; Tanaka, T. A General Formula for the Stationary Distribution of the Age of Information and Its Application to Single-Server Queues. IEEE Trans. Inf. Theory 2019, 65, 8305–8324. [Google Scholar] [CrossRef] [Green Version]
- Yates, R.D.; Kaul, S.K. The Age of Information: Real-Time Status Updating by Multiple Sources. IEEE Trans. Inf. Theory 2019, 65, 1807–1827. [Google Scholar] [CrossRef] [Green Version]
- Kaul, S.K.; Yates, R.D.; Gruteser, M. Status updates through queues. In Proceedings of the 2012 46th Annual Conference on Information Sciences and Systems (CISS), Princeton, NJ, USA, 21–23 March 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Costa, M.; Codreanu, M.; Ephremides, A. Age of information with packet management. In Proceedings of the 2014 IEEE International Symposium on Information Theory, Honolulu, HI, USA, 29 June–4 July 2014; pp. 1583–1587. [Google Scholar] [CrossRef]
- Costa, M.; Codreanu, M.; Ephremides, A. On the Age of Information in Status Update Systems With Packet Management. IEEE Trans. Inf. Theory 2016, 62, 1897–1910. [Google Scholar] [CrossRef]
- Kam, C.; Kompella, S.; Nguyen, G.D.; Wieselthier, J.E.; Ephremides, A. Age of information with a packet deadline. In Proceedings of the 2016 IEEE International Symposium on Information Theory (ISIT), Barcelona, Spain, 10–15 July 2016; pp. 2564–2568. [Google Scholar] [CrossRef]
- Kam, C.; Kompella, S.; Nguyen, G.D.; Wieselthier, J.E.; Ephremides, A. On the Age of Information With Packet Deadlines. IEEE Trans. Inf. Theory 2018, 64, 6419–6428. [Google Scholar] [CrossRef]
- Inoue, Y. Analysis of the Age of Information with Packet Deadline and Infinite Buffer Capacity. In Proceedings of the 2018 IEEE International Symposium on Information Theory (ISIT), Vail, CO, USA, 17–22 June 2018; pp. 2639–2643. [Google Scholar] [CrossRef]
- Kavitha, V.; Altman, E.; Saha, I. Controlling Packet Drops to Improve Freshness of information. arXiv 2018, arXiv:1807.09325v1. [Google Scholar]
- Wang, B.; Feng, S.; Yang, J. When to preempt? Age of information minimization under link capacity constraint. J. Commun. Netw. 2019, 21, 220–232. [Google Scholar] [CrossRef]
- Arafa, A.; Yates, R.D.; Poor, H.V. Timely Cloud Computing: Preemption and Waiting. In Proceedings of the 2019 57th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 24–27 September 2019; pp. 528–535. [Google Scholar] [CrossRef] [Green Version]
- Zou, P.; Ozel, O.; Subramaniam, S. Waiting Before Serving: A Companion to Packet Management in Status Update Systems. IEEE Trans. Inf. Theory 2020, 66, 3864–3877. [Google Scholar] [CrossRef] [Green Version]
- Kam, C.; Kompella, S.; Nguyen, G.D.; Ephremides, A. Effect of Message Transmission Path Diversity on Status Age. IEEE Trans. Inf. Theory 2016, 62, 1360–1374. [Google Scholar] [CrossRef]
- Kaswan, P.; Bastopcu, M.; Ulukus, S. Freshness Based Cache Updating in Parallel Relay Networks. In Proceedings of the 2021 IEEE International Symposium on Information Theory (ISIT), Melbourne, Australia, 12–20 July 2021; pp. 3355–3360. [Google Scholar] [CrossRef]
- Moltafet, M.; Leinonen, M.; Codreanu, M. On the Age of Information in Multi-Source Queueing Models. IEEE Trans. Commun. 2020, 68, 5003–5017. [Google Scholar] [CrossRef]
- Abd-Elmagid, M.A.; Dhillon, H.S. Age of Information in Multi-source Updating Systems Powered by Energy Harvesting. IEEE J. Sel. Areas Inf. Theory 2022, 3, 98–112. [Google Scholar] [CrossRef]
- Chen, Z.; Pappas, N.; Björnson, E.; Larsson, E.G. Optimizing Information Freshness in a Multiple Access Channel With Heterogeneous Devices. IEEE Open J. Commun. Soc. 2021, 2, 456–470. [Google Scholar] [CrossRef]
- Jiang, Y.; Miyoshi, N. Joint Performance Analysis of Ages of Information in a Multi-Source Pushout Server. IEEE Trans. Inf. Theory 2022, 68, 965–975. [Google Scholar] [CrossRef]
- Tang, Z.; Sun, Z.; Yang, N.; Zhou, X. Age of Information of Multi-Source Systems with Packet Management. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Farazi, S.; Klein, A.G.; Brown, D.R. Average Age of Information in Multi-Source Self-Preemptive Status Update Systems with Packet Delivery Errors. In Proceedings of the 2019 53rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 3–6 November 2019; pp. 396–400. [Google Scholar] [CrossRef]
- Abd-Elmagid, M.A.; Dhillon, H.S. A Stochastic Hybrid Systems Approach to the Joint Distribution of Ages of Information in Networks. arXiv 2022, arXiv:2205.07448v1. [Google Scholar]
- He, T.; Chin, K.W.; Zhang, Z.; Liu, T.; Wen, J. Optimizing Information Freshness in RF-Powered Multi-Hop Wireless Networks. IEEE Trans. Wirel. Commun. 2022. [Google Scholar] [CrossRef]
- Gu, Y.; Wang, Q.; Chen, H.; Li, Y.; Vucetic, B. Optimizing Information Freshness in Two-Hop Status Update Systems under a Resource Constraint. IEEE J. Sel. Areas Commun. 2021, 39, 1380–1392. [Google Scholar] [CrossRef]
- Ayan, O.; Gürsu, H.M.; Papa, A.; Kellerer, W. Probability Analysis of Age of Information in Multi-Hop Networks. IEEE Netw. Lett. 2020, 2, 76–80. [Google Scholar] [CrossRef] [Green Version]
- Farazi, S.; Klein, A.G.; Brown, D.R. Fundamental bounds on the age of information in multi-hop global status update networks. J. Commun. Netw. 2019, 21, 268–279. [Google Scholar] [CrossRef]
- Talak, R.; Karaman, S.; Modiano, E. Minimizing age-of-information in multi-hop wireless networks. In Proceedings of the 55th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 3–6 October 2017; pp. 486–493. [Google Scholar] [CrossRef]
- Moradian, M.; Dadlani, A. Average Age of Information in Two-Way Relay Networks with Service Preemptions. In Proceedings of the IEEE GLOBECOM, Madrid, Spain, 7–11 December 2021; pp. 01–06. [Google Scholar] [CrossRef]
- Zakeri, A.; Moltafet, M.; Leinonen, M.; Codreanu, M. Minimizing AoI in Resource-Constrained Multi-Source Relaying Systems with Stochastic Arrivals. In Proceedings of the IEEE GLOBECOM, Madrid, Spain, 7–11 December 2021. [Google Scholar] [CrossRef]
- Yuan, X.; Zhu, Y.; Jiang, H.; Hu, Y.; Schmeink, A. Data Freshness Optimization in Relaying Network Operating with Finite Blocklength Codes. In Proceedings of the IEEE GLOBECOM, Madrid, Spain, 7–11 December 2021. [Google Scholar]
- Li, B.; Wang, Q.; Chen, H.; Zhou, Y.; Li, Y. Optimizing Information Freshness for Cooperative IoT Systems With Stochastic Arrivals. IEEE Internet Things J. 2021, 8, 14485–14500. [Google Scholar] [CrossRef]
- Zheng, Y.; Hu, J.; Yang, K. Average Age of Information in Wireless Powered Relay Aided Communication Network. IEEE Internet Things J. 2021. [Google Scholar] [CrossRef]
- Buyukates, B.; Bastopcu, M.; Ulukus, S. Version Age of Information in Clustered Gossip Networks. IEEE J. Sel. Areas Inf. Theory 2022, 3, 85–97. [Google Scholar] [CrossRef]
- Yates, R.D. The Age of Gossip in Networks. In Proceedings of the 2021 IEEE International Symposium on Information Theory (ISIT), Melbourne, Australia, 12–20 July 2021; pp. 2984–2989. [Google Scholar] [CrossRef]
- Yates, R.D. The Age of Information in Networks: Moments, Distributions, and Sampling. IEEE Trans. Inf. Theory 2020, 66, 5712–5728. [Google Scholar] [CrossRef]
- Champati, J.P.; Al-Zubaidy, H.; Gross, J. Statistical guarantee optimization for age of information for the D/G/1 queue. In Proceedings of the IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018; pp. 130–135. [Google Scholar] [CrossRef] [Green Version]
- Champati, J.P.; Al-Zubaidy, H.; Gross, J. Statistical Guarantee Optimization for AoI in Single-Hop and Two-Hop FCFS Systems With Periodic Arrivals. IEEE Trans. Commun. 2021, 69, 365–381. [Google Scholar] [CrossRef]
- Akar, N.; Doğan, O.; Atay, E.U. Finding the Exact Distribution of (Peak) Age of Information for Queues of PH/PH/1/1 and M/PH/1/2 Type. IEEE Trans. Commun. 2020, 68, 5661–5672. [Google Scholar] [CrossRef]
- Talak, R.; Karaman, S.; Modiano, E. Optimizing Information Freshness in Wireless Networks under General Interference Constraints. IEEE-ACM Trans. Netw. 2020, 28, 15–28. [Google Scholar] [CrossRef] [Green Version]
- Abd-Elmagid, M.A.; Dhillon, H.S.; Pappas, N. A Reinforcement Learning Framework for Optimizing Age of Information in RF-Powered Communication Systems. IEEE Trans. Commun. 2020, 68, 4747–4760. [Google Scholar] [CrossRef]
- Kadota, I.; Sinha, A.; Modiano, E. Scheduling Algorithms for Optimizing Age of Information in Wireless Networks with Throughput Constraints. IEEE-ACM Trans. Netw. 2019, 27, 1359–1372. [Google Scholar] [CrossRef]
- Yang, H.H.; Arafa, A.; Quek, T.Q.S.; Poor, H.V. Optimizing Information Freshness in Wireless Networks: A Stochastic Geometry Approach. IEEE. Trans. Mob. Comput. 2021, 20, 2269–2280. [Google Scholar] [CrossRef] [Green Version]
- He, Q.; Dán, G.; Fodor, V. Joint Assignment and Scheduling for Minimizing Age of Correlated Information. IEEE-ACM Trans. Netw. 2019, 27, 1887–1900. [Google Scholar] [CrossRef]
- Hsu, Y.P.; Modiano, E.; Duan, L. Scheduling Algorithms for Minimizing Age of Information in Wireless Broadcast Networks with Random Arrivals. IEEE. Trans. Mob. Comput. 2020, 19, 2903–2915. [Google Scholar] [CrossRef]
- Kadota, I.; Modiano, E. Minimizing the Age of Information in Wireless Networks with Stochastic Arrivals. IEEE. Trans. Mob. Comput. 2021, 20, 1173–1185. [Google Scholar] [CrossRef]
- Kadota, I.; Sinha, A.; Uysal-Biyikoglu, E.; Singh, R.; Modiano, E. Scheduling Policies for Minimizing Age of Information in Broadcast Wireless Networks. IEEE-ACM Trans. Netw. 2018, 26, 2637–2650. [Google Scholar] [CrossRef] [Green Version]
- Maatouk, A.; Kriouile, S.; Assad, M.; Ephremides, A. On the Optimality of the Whittle’s Index Policy for Minimizing the Age of Information. IEEE Trans. Wirel. Commun. 2021, 20, 1263–1277. [Google Scholar] [CrossRef]
- Zhou, B.; Saad, W. Joint Status Sampling and Updating for Minimizing Age of Information in the Internet of Things. IEEE Trans. Commun. 2019, 67, 7468–7482. [Google Scholar] [CrossRef] [Green Version]
- Hespanha, J.P. Modelling and analysis of stochastic hybrid systems. IEE Proc.-Control Theory Appl. 2006, 153, 520–535. [Google Scholar] [CrossRef]
- Kosta, A.; Pappas, N.; Ephremides, A.; Angelakis, V. Non-linear Age of Information in a Discrete Time Queue: Stationary Distribution and Average Performance Analysis. In Proceedings of the 2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Kosta, A.; Pappas, N.; Ephremides, A.; Angelakis, V. The Age of Information in a Discrete Time Queue: Stationary Distribution and Non-Linear Age Mean Analysis. IEEE J. Sel. Areas Commun. 2021, 39, 1352–1364. [Google Scholar] [CrossRef]
- Brill, P. Level Crossing Methods in Stochastic Models; Springer: New York, NY, USA, 2017. [Google Scholar]
- Tripathi, V.; Talak, R.; Modiano, E. Age of Information for Discrete Time Queues. arXiv 2019, arXiv:1901.10463v1. [Google Scholar]
- Akar, N.; Doğan, O. Discrete-Time Queueing Model of Age of Information With Multiple Information Sources. IEEE Internet Things J. 2021, 8, 14531–14542. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, Y. On Age of Information for Discrete Time Status Updating System With Ber/G/1/1 Queues. In Proceedings of the IEEE Information Theory Workshop (ITW), Kanazawa, Japan, 17–21 October 2021; pp. 1–6. [Google Scholar]
- Zhang, J.; Xu, Y. On Discrete Age of Information of Infinite Size Status Updating System. arXiv 2022, arXiv:2204.11532v1. [Google Scholar]
- Zhang, J. Discrete Packet Management: Analysis of Age of Information of Discrete Time Status Updating Systems. arXiv 2022, arXiv:2204.13333v1. [Google Scholar]
- Moltafet, M.; Leinonen, M.; Codreanu, M. Average AoI in Multi-Source Systems With Source-Aware Packet Management. IEEE Trans. Commun. 2021, 69, 1121–1133. [Google Scholar] [CrossRef]
- Feng, S.; Yang, J. Age-Optimal Transmission of Rateless Codes in an Erasure Channel. In Proceedings of the 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019. [Google Scholar]
- Zhong, J.; Yates, R.D.; Soljanin, E. Timely Lossless Source Coding for Randomly Arriving Symbols. In Proceedings of the 2018 IEEE Information Theory Workshop (ITW), Guangzhou, China, 25–29 November 2018. [Google Scholar]
- Doǧan, O.; Akar, N. The Multi-Source Probabilistically Preemptive M/PH/1/1 Queue With Packet Errors. IEEE Trans. Commun. 2021, 69, 7297–7308. [Google Scholar] [CrossRef]
- Thekkilakattil, A.; Dobrin, R.; Punnekkat, S. Probabilistic preemption control using frequency scaling for sporadic real-time tasks. In Proceedings of the 7th IEEE International Symposium on Industrial Embedded Systems (SIES’12), Karlsruhe, Germany, 20–22 June 2012; pp. 158–165. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average Continuous and Average Discrete AoIs |
|---|
| Initial State Vector | Considered r.v.s | Realizations and Next State Vector |
|---|---|---|
| : | ||
| : | ||
| : | ||
| : | ||
| : | ||
| : | ||
| : | ||
| : | ||
| : | ||
| : | ||
| : | ||
| : |
| Average Continuous and Average Discrete AoIs |
|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Xu, Y. Age Analysis of Status Updating System with Probabilistic Packet Preemption. Entropy 2022, 24, 785. https://doi.org/10.3390/e24060785
Zhang J, Xu Y. Age Analysis of Status Updating System with Probabilistic Packet Preemption. Entropy. 2022; 24(6):785. https://doi.org/10.3390/e24060785
Chicago/Turabian StyleZhang, Jixiang, and Yinfei Xu. 2022. "Age Analysis of Status Updating System with Probabilistic Packet Preemption" Entropy 24, no. 6: 785. https://doi.org/10.3390/e24060785
APA StyleZhang, J., & Xu, Y. (2022). Age Analysis of Status Updating System with Probabilistic Packet Preemption. Entropy, 24(6), 785. https://doi.org/10.3390/e24060785