
A Bayesian Surprise Approach in Designing Cognitive Radar for Autonomous Driving


Abstract
:1. Introduction
Notation
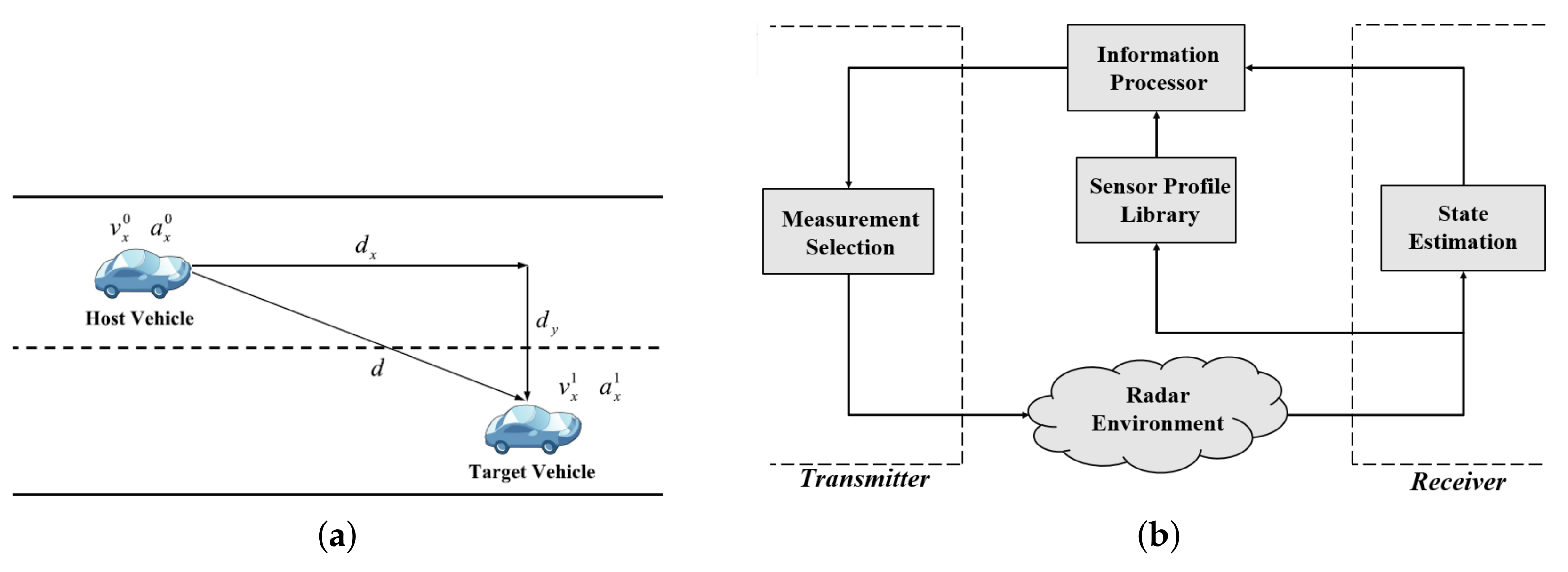
2. Problem Formulation
2.1. Model Assumptions
2.1.1. Linear Gaussian Dynamic System
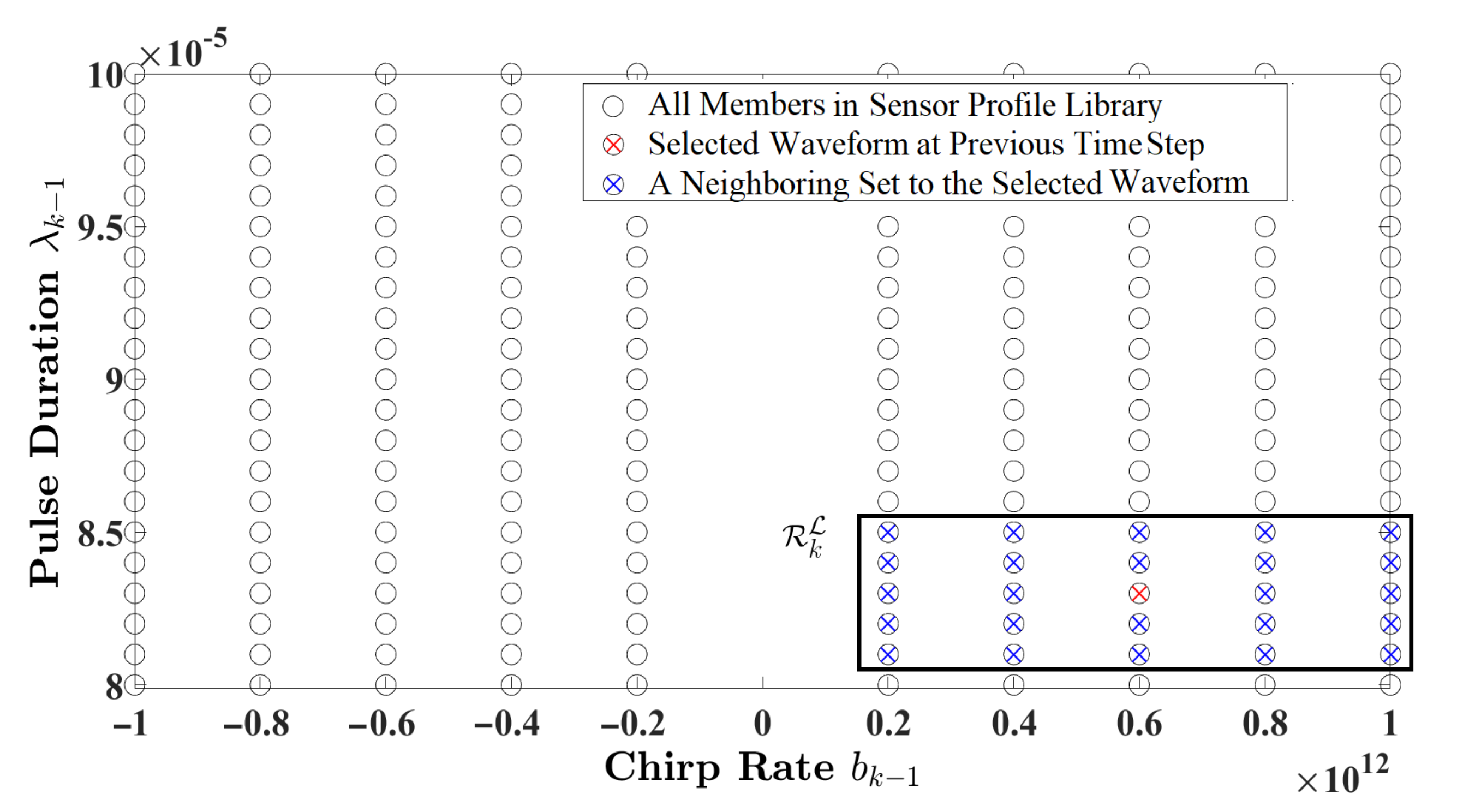
2.1.2. Sensor Profile Library
2.2. Research Objective
3. Proposed Method
3.1. Prior Works
3.2. Solution to Research Problem 1
| Algorithm 1: Kalman filter [26]. |
Measurement update (Estimation): Time update (Prediction): |
3.3. Solution to Research Problem 2
3.4. Solution to Research Problem 3
| Algorithm 2: Cognitive radar for one-step planning. |
1: and are available at time k 2: 3: for 4: 5: Compute from (15) 6: end for 7: for 8: |
| Algorithm 3: Cognitive radar for L-step planning. |
1: and are available at time k 2: 3: for 4: 5: 6: for 7: 8: 9: 10: 11: for 12: 13: 14: Compute from (24) 15: end for 16: 17: end for 18: end for 19: for 20: |
4. Numerical Results
4.1. Simulation Setup and Data Generation
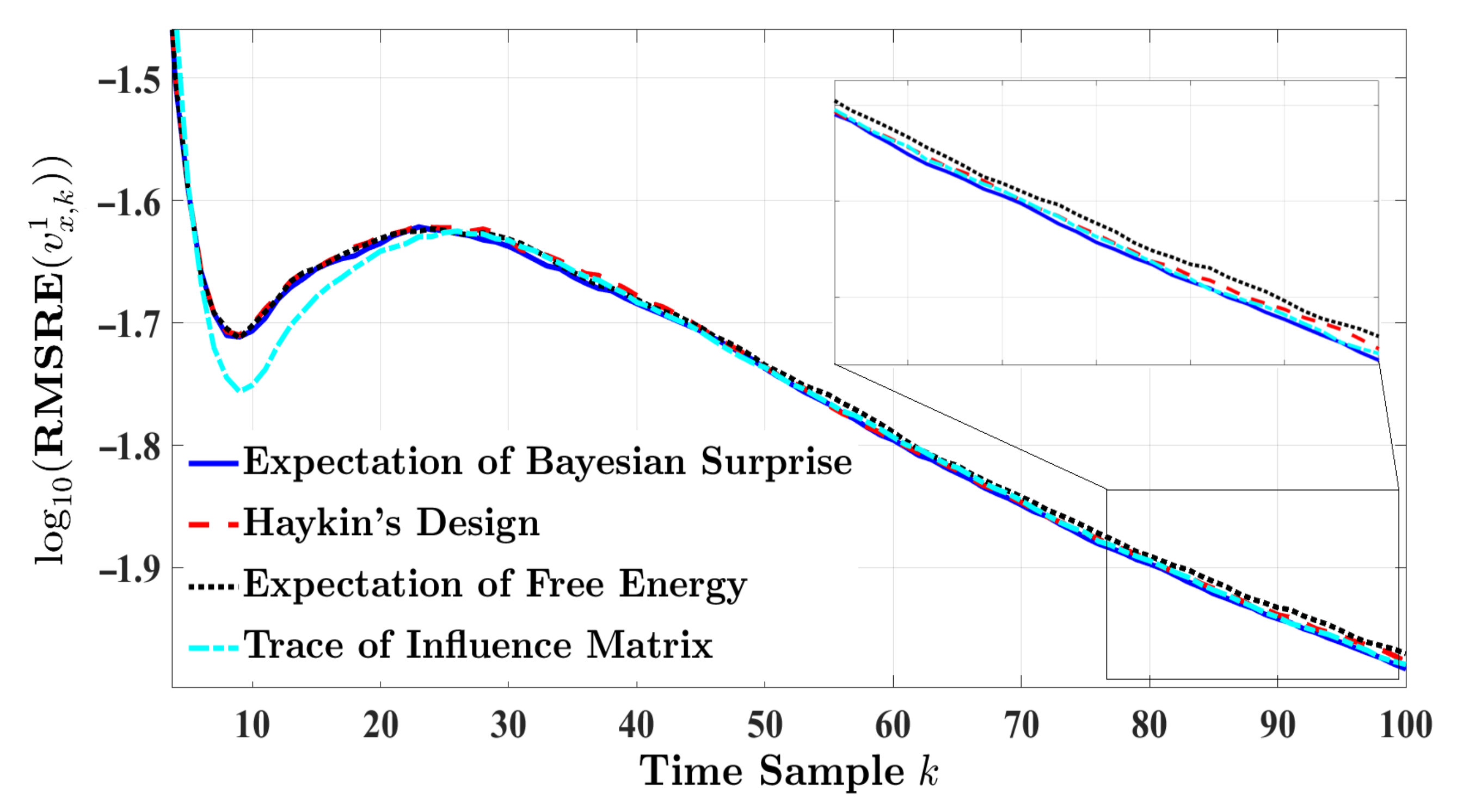
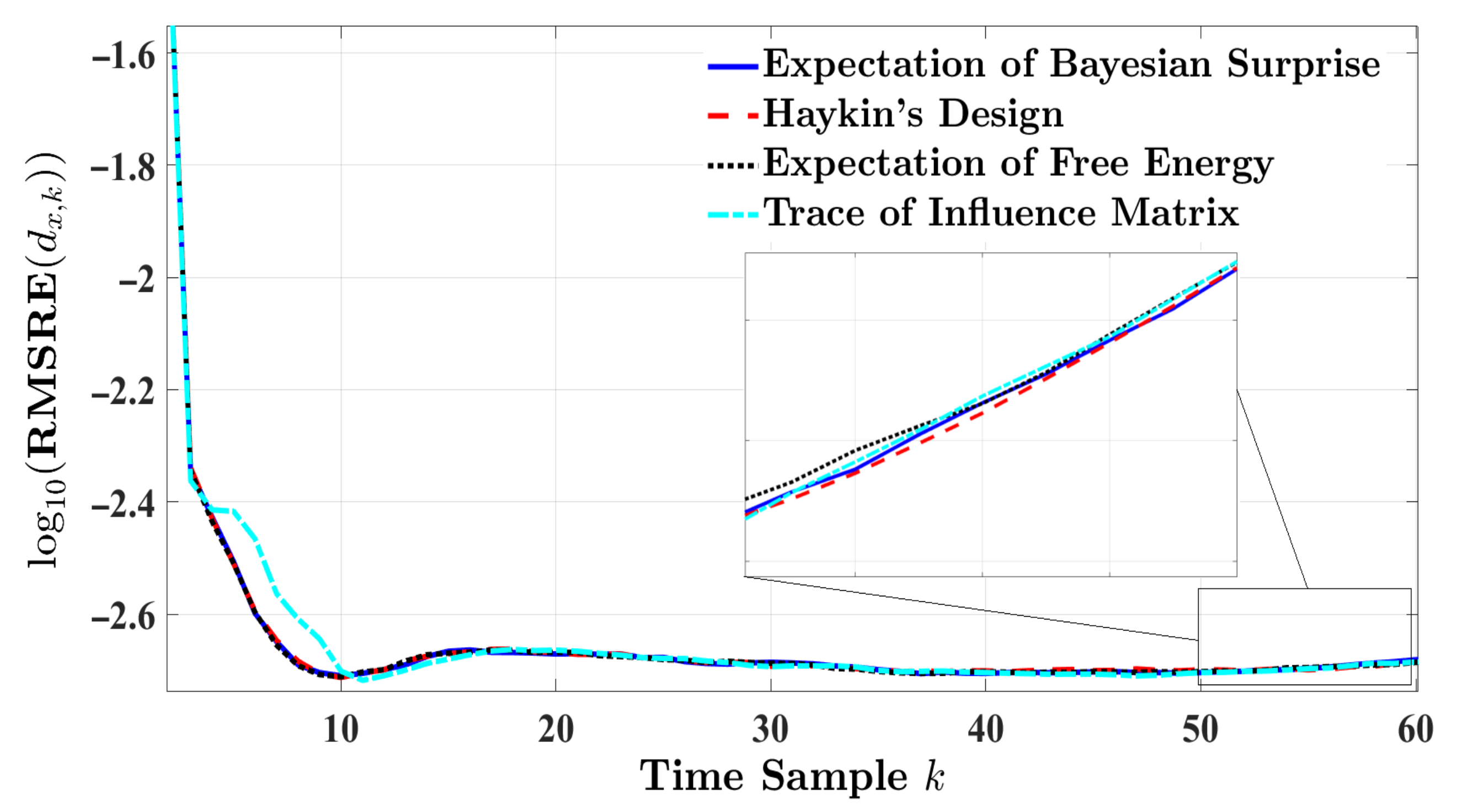
4.2. Evaluation Metrics
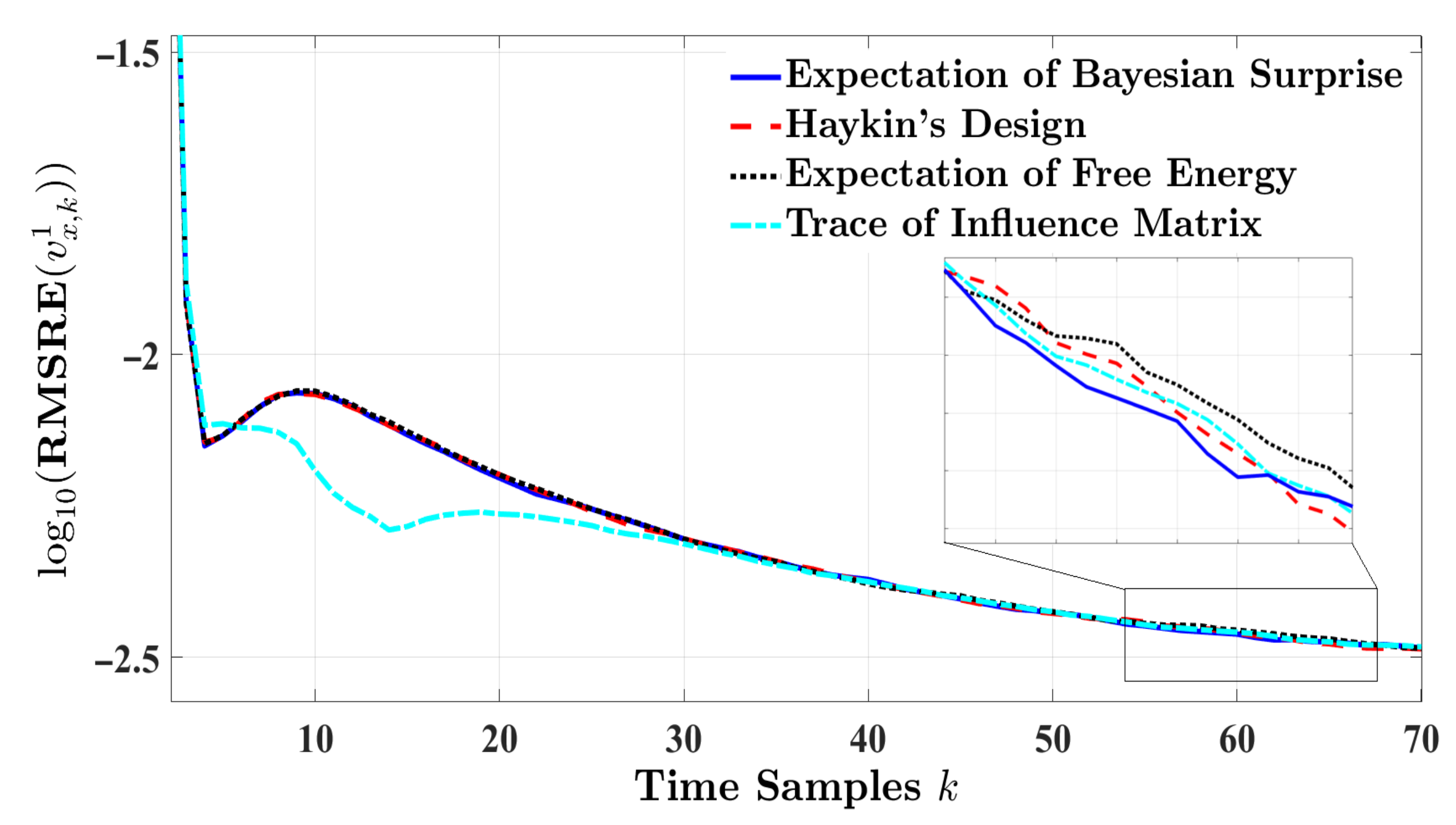
4.3. Performance Evaluation and Comparison for One-Step Planning
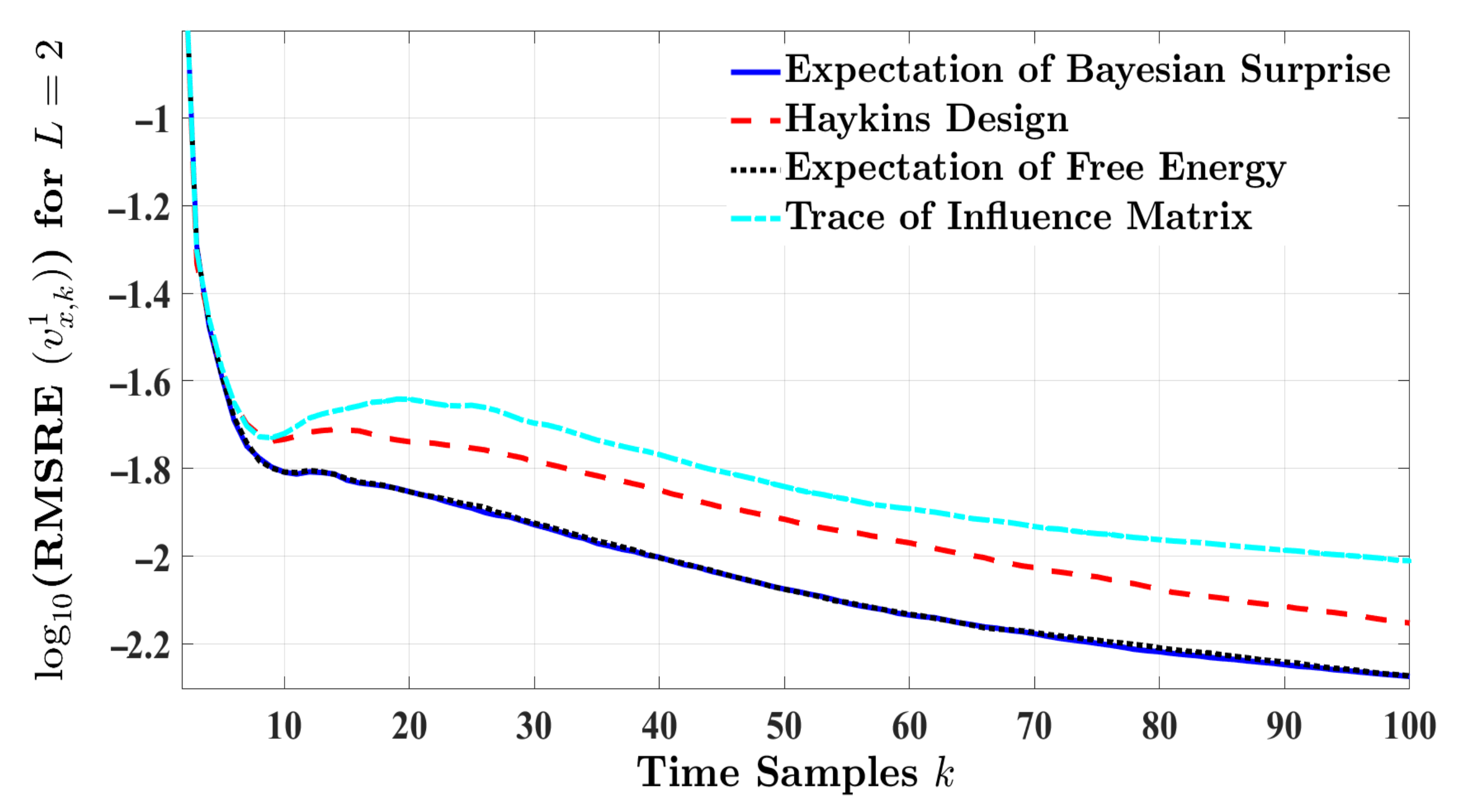
4.4. Performance Evaluation and Comparison for L-Step Planning
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Snider, A. Pedestrian Deaths Soar in 2020 Despite Precipitous Drop in Driving during Pandemic. Available online: https://www.ghsa.org/resources/news-releases/GHSA/Ped-Spotlight-Addendum21 (accessed on 18 March 2022).
- Mims, C. For Self-Driving Cars, the Hot New Technology Is… Radar. Available online: https://www.wsj.com/articles/for-self-driving-cars-the-hot-new-technology-is-radar-11632542430 (accessed on 18 March 2022).
- Hussain, R.; Zeadally, S. Autonomous cars: Research results, issues, and future challenges. IEEE Commun. Surv. Tutor. 2018, 21, 1275–1313. [Google Scholar] [CrossRef]
- Jo, K.; Kim, J.; Kim, D.; Jang, C.; Sunwoo, M. Development of autonomous car—Part II: A case study on the implementation of an autonomous driving system based on distributed architecture. IEEE Trans. Ind. Electron. 2015, 62, 5119–5132. [Google Scholar] [CrossRef]
- Hakobyan, G.; Yang, B. High-performance automotive radar: A review of signal processing algorithms and modulation schemes. IEEE Signal Process. Mag. 2019, 36, 32–44. [Google Scholar] [CrossRef]
- Roos, F.; Bechter, J.; Knill, C.; Schweizer, B.; Waldschmidt, C. Radar sensors for autonomous driving: Modulation schemes and interference mitigation. IEEE Microw. Mag. 2019, 20, 58–72. [Google Scholar] [CrossRef] [Green Version]
- Haykin, S. Cognitive radar: A way of the future. IEEE Signal Process. Mag. 2006, 23, 30–40. [Google Scholar] [CrossRef]
- Greco, M.S.; Gini, F.; Stinco, P.; Bell, K. Cognitive radars: On the road to reality: Progress thus far and possibilities for the future. IEEE Signal Process. Mag. 2018, 35, 112–125. [Google Scholar] [CrossRef]
- Haykin, S.; Xue, Y.; Setoodeh, P. Cognitive radar: Step toward bridging the gap between neuroscience and engineering. Proc. IEEE 2012, 100, 3102–3130. [Google Scholar] [CrossRef]
- Gurbuz, S.Z.; Griffiths, H.D.; Charlish, A.; Rangaswamy, M.; Greco, M.S.; Bell, K. An overview of cognitive radar: Past, present, and future. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 6–18. [Google Scholar] [CrossRef]
- Stahl, A.E.; Feigenson, L. Observing the unexpected enhances infants’ learning and exploration. Science 2015, 348, 91–94. [Google Scholar] [CrossRef] [Green Version]
- Barto, A.; Mirolli, M.; Baldassarre, G. Novelty or surprise? Front. Psychol. 2013, 4, 907. [Google Scholar] [CrossRef]
- Baldi, P.; Itti, L. Of bits and wows: A Bayesian theory of surprise with applications to attention. Neural Netw. 2010, 23, 649–666. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]
- Baldi, P. A computational theory of surprise. In Information, Coding and Mathematics; Springer: Berlin/Heidelberg, Germany, 2002; pp. 1–25. [Google Scholar]
- Friston, K. The free-energy principle: A unified brain theory? Nat. Rev. Neurosci. 2010, 11, 127. [Google Scholar] [CrossRef] [PubMed]
- Faraji, M.; Preuschoff, K.; Gerstner, W. Balancing new against old information: The role of puzzlement surprise in learning. Neural Comput. 2018, 30, 34–83. [Google Scholar] [CrossRef]
- Palm, G. Novelty, Information and Surprise; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Itti, L.; Baldi, P. Bayesian surprise attracts human attention. Vis. Res. 2009, 49, 1295–1306. [Google Scholar] [CrossRef] [Green Version]
- Çatal, O.; Leroux, S.; De Boom, C.; Verbelen, T.; Dhoedt, B. Anomaly Detection for Autonomous Guided Vehicles using Bayesian Surprise. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 8148–8153. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Liakoni, V.; Modirshanechi, A.; Gerstner, W.; Brea, J. Learning in volatile environments with the Bayes factor surprise. Neural Comput. 2021, 33, 269–340. [Google Scholar] [CrossRef]
- Svendsen, D.H.; Martino, L.; Camps-Valls, G. Active emulation of computer codes with Gaussian processes–Application to remote sensing. Pattern Recognit. 2020, 100, 107103. [Google Scholar] [CrossRef] [Green Version]
- Busby, D. Hierarchical adaptive experimental design for Gaussian process emulators. Reliab. Eng. Syst. Saf. 2009, 94, 1183–1193. [Google Scholar] [CrossRef]
- Kennedy, M.C.; O’Hagan, A. Bayesian calibration of computer models. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 2001, 63, 425–464. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Haykin, S. Cognitive Dynamic Systems: Perception-Action Cycle, Radar and Radio; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Feng, S.; Haykin, S. Cognitive risk control for transmit-waveform selection in vehicular radar systems. IEEE Trans. Veh. Technol. 2018, 67, 9542–9556. [Google Scholar] [CrossRef]
- Bell, K.L.; Baker, C.J.; Smith, G.E.; Johnson, J.T.; Rangaswamy, M. Cognitive radar framework for target detection and tracking. IEEE J. Sel. Top. Signal Process. 2015, 9, 1427–1439. [Google Scholar] [CrossRef]
- Cardinali, C.; Pezzulli, S.; Andersson, E. Influence-matrix diagnostic of a data assimilation system. Q. J. R. Meteorol. Soc. J. Atmos. Sci. Appl. Meteorol. Phys. Oceanogr. 2004, 130, 2767–2786. [Google Scholar] [CrossRef]
- Hasch, J.; Topak, E.; Schnabel, R.; Zwick, T.; Weigel, R.; Waldschmidt, C. Millimeter-wave technology for automotive radar sensors in the 77 GHz frequency band. IEEE Trans. Microw. Theory Tech. 2012, 60, 845–860. [Google Scholar] [CrossRef]
- Yin, H.; Li, X.R.; Lan, J. Pairwise comparison based ranking vector approach to estimation performance ranking. IEEE Trans. Syst. Man, Cybern. Syst. 2017, 48, 942–953. [Google Scholar] [CrossRef]
- Venhovens, P.J.T.; Naab, K. Vehicle dynamics estimation using Kalman filters. Veh. Syst. Dyn. 1999, 32, 171–184. [Google Scholar] [CrossRef]
- Kershaw, D.J.; Evans, R.J. Optimal waveform selection for tracking systems. IEEE Trans. Inf. Theory 1994, 40, 1536–1550. [Google Scholar] [CrossRef]
- Razi, A.; Friston, K.J. The connected brain: Causality, models, and intrinsic dynamics. IEEE Signal Process. Mag. 2016, 33, 14–35. [Google Scholar] [CrossRef] [Green Version]
- Smith, R.; Friston, K.J.; Whyte, C.J. A step-by-step tutorial on active inference and its application to empirical data. J. Math. Psychol. 2022, 107, 102632. [Google Scholar] [CrossRef]
- Zamiri-Jafarian, Y.; Plataniotis, K.N. Bayesian Surprise in Linear Gaussian Dynamic Systems: Revisiting State Estimation. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 3387–3394. [Google Scholar]
- Li, X.R.; Zhao, Z. Evaluation of estimation algorithms part I: Incomprehensive measures of performance. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1340–1358. [Google Scholar] [CrossRef]
- Koudahl, M.T.; Kouw, W.M.; de Vries, B. On Epistemics in Expected Free Energy for Linear Gaussian State Space Models. Entropy 2021, 23, 1565. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Information Processor | Measurement Selection |
|---|---|---|
| Haykin’s Approach | ||
| Expectation of Bayesian Surprise | ||
| Expectation of Free Energy | ||
| Trace of Influence Matrix |
| Relative Error Metric | Absolute of Error Metric | |
|---|---|---|
| Root mean square relative error (RMSRE) | ||
| Average Euclidean relative error (ARE) | ||
| Harmonic average relative error (HRE) | ||
| Geometric average relative error (GRE) |
| ARMSRE | ||||
| AARE | ||||
| AHRE | ||||
| ARMSRE | ||||
| AARE | ||||
| AHRE | ||||
| ARMSRE | ||||
| AARE | ||||
| AHRE | ||||
| ARMSRE | ||||
| AARE | ||||
| AHRE | ||||
| ARMSRE |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zamiri-Jafarian, Y.; Plataniotis, K.N. A Bayesian Surprise Approach in Designing Cognitive Radar for Autonomous Driving. Entropy 2022, 24, 672. https://doi.org/10.3390/e24050672
Zamiri-Jafarian Y, Plataniotis KN. A Bayesian Surprise Approach in Designing Cognitive Radar for Autonomous Driving. Entropy. 2022; 24(5):672. https://doi.org/10.3390/e24050672
Chicago/Turabian StyleZamiri-Jafarian, Yeganeh, and Konstantinos N. Plataniotis. 2022. "A Bayesian Surprise Approach in Designing Cognitive Radar for Autonomous Driving" Entropy 24, no. 5: 672. https://doi.org/10.3390/e24050672
APA StyleZamiri-Jafarian, Y., & Plataniotis, K. N. (2022). A Bayesian Surprise Approach in Designing Cognitive Radar for Autonomous Driving. Entropy, 24(5), 672. https://doi.org/10.3390/e24050672