1. Introduction
The theory of non-associative algebras is an important branch of abstract algebra. Such kinds of algebras include baric, evolution, Bernstein, train, and stochastic algebras. These types of objects were tied up with the abstract description of biological systems [
1,
2,
3,
4].
Let
be an algebra over a field
, where
is called an
evolution algebra if it admits a basis
such that
The matrix is called the structure matrix of relative to B. A basis B satisfying (2) is called the natural basis of We say that is a non-negative evolution algebra if and the structure matrix entries are non-negative.
These kinds of algebras were first considered in [
5,
6,
7] and have been exhaustively studied over the recent years (see [
8,
9,
10,
11,
12,
13,
14,
15,
16] and references therein for a review of some of the main results achieved on this topic [
17]). These algebras are related to a wide variety of mathematical subjects, including Markov chains and dynamical systems [
18,
19]. The relationship between evolution algebras and homogeneous discrete-time Markov chains was settled in [
6]. We recall that Markov evolution algebra is a non-negative evolution algebra whose structure matrix
A has row sums equal to 1.
Tian [
6] proposed one of the most fruitful further topics of research: the development of the theory of continuous evolution algebras and their connection to continuous-time Markov processes. He outlined continuous evolution algebras to be evolution algebras using multiplication, with respect to a natural basis
, such that
for some functions
.
Recently, Markov evolution algebras have been strongly connected with group theory, Markov processes, the theory of knots, dynamic systems, and graph theory [
11,
20,
21,
22,
23,
24]. In [
25], Markov evolution algebras, whose stricture matrices obey semi-group property, were investigated. This type of study is related to the chain of evolution algebras [
26].
On the other hand, recently, in [
27], we introduced a new class of evolution algebras called
S-evolution algebras. These algebras are not nilpotent and naturally extended Lotka—Volterra evolution algebras [
18]. It is stressed that directed weighted graphs associated with
S-evolution algebras have meaning, whereas those connected with Lotka—Volterra algebras do not.
Due to [
28], the intersection of information theory and algebraic topology is fertile ground. For example, in [
29], it was established that the Shannon entropy defines a derivation of the operad of topological simplices. On the other hand, it is important to construct invariants for evolution algebras which can detect their isomorphism. It turns out that such an invariant can be defined via the Shannon entropy for
S-evolution algebras. In the present paper, we demonstrate how this entropy allows for the treatment of the isomorphism of
S-evolution algebras. To be precise, we demonstrate that, if
S-evolution algebras (symmetric) have different entropies, they are not isomorphic. This result enables the construction of many examples of non-isomorphic evolution algebras. As a result of the primary finding, we propose a non-isomorphic family of Markov evolution algebras. This result sheds new light on the Markov evolution algebras and their isomorphism problems.
Let us briefly describe the structure of this paper.
Section 2 contains preliminary definitions of evolution algebra. In
Section 3, we define the entropy of the structural matrix of the Markov evolution algebra, and we demonstrate that any isomorphic
evolution algebra would produce the same Markov evolution algebra. Furthermore, we derive Markov evolution algebra through the Hadamard product of the structural matrix
A of
evolution algebra. We show that the entropy of such a matrix will be constant if
whereas the entropy will be decreasing if
This result allows us to construct a lot of non-isomorphic chains of Markov evolution algebras (see [
26]). Finally, in
Section 4, the relative entropy is defined, and we prove that such a function is a measure of the ‘distance’, even though it is not a metric space, since the symmetric axiom, in general, is not satisfied. In the case of symmetric evolution algebra, we show that this property is satisfied only in the class of isomorphic algebras.
2. Preliminaries
In this section, we recall the definitions of
evolution algebra and some definitions which are needed throughout the paper. Let
be a real non-negative evolution algebra with structure matrix
and natural basis
B. If
and
for any
, then
is called
Markov evolution algebra. The name is due to the fact that there is an interesting one-to-one correspondence between
and a discrete time Markov chain
with the stated space
and transition probabilities given by
, i.e., for
:
for any
.
For the sake of completeness, we wish to state that a discrete-time Markov chain can be thought of as a sequence of random variables
defined in the same probability space, taking values from the same set
, and such that the Markovian property is satisfied, i.e., for any set of values
, and any
, it holds
Notice that, in the correspondence between the evolution algebra and the Markov chain , what we have is each state of identified with a generator of B.
Definition 1 ([
27]).
A matrix is called an matrix if- 1
for all
- 2
if and only if .
We notice that, if is a matrix, then there is a family of injective functions , with such that for all . Hence, each S-matrix is uniquely defined by off diagonal upper triangular matrix and a family of functions . This allows us to construct lots of examples of S-matrices.
Given an upper triangular matrix , one can construct several examples of S-matrices as follows:
symmetric matrices, i.e., ;
skew-symmetric matrices, i.e., ;
.
Definition 2. An evolution algebra is called an evolution algebra if its structural matrix is an matrix.
Remark 1. We note that evolution algebras corresponding to skew-symmetric matrices are called Lotka–Volterra evolution algebras. Such kinds of algebras have been investigated in [18]. One can see that the conical form of the table of multiplication of
evolution algebra
with respect to
natural basis is given by
We note that, if , then the first part of (4) is zero, if , then the second part is zero.
Remark 2. The motivation behind introducing S-evolution algebra is that such algebras have certain applications in the study of electrical circuits, finding the shortest routes and constructing a model for analysis and solution of other problems [8,30]. Definition 3. A linear mapis called the homomorphism of evolution algebras iffor anyMoreover, if ψ is bijective, then it is called an isomorphism. In this case, the last relationship is denoted by
Definition 4. Let be an evolution algebra with a natural basis and structural matrix .
- 1.
A graph , with and , is called the graph attached to the evolution algebra relative to the natural basis B.
- 2.
The triple , with and where ω is the map given by , is called the weighted graph attached to the evolution algebra relative to the natural basis B.
Recall that if every two vertices of a graph are connected by an edge, then such a graph is called complete.
Using the graph
, in [
27], we have established the isomorphism of
S-evolution algebras.
Theorem 1 ([
27]).
Let and be two S-evolution algebras with structural matrices, respectively, whose attached graphs are complete. Then, if and only if the following conditions are satisfied 3. -Evolution Algebras and Corresponding Markov Evolution Algebras
In what follows, we always assume that
is a non-negative, symmetric
S-evolution algebra with structure matrix
and natural basis
B. Using the matrix
A, one can define a stochastic matrix
as follows:
where
. Sometimes,
is denoted by
.
An evolution algebra with the natural basis B and structural matrix is a Markov evolution algebra corresponding to which is denoted by .
Our task now is to examine the isomorphism between and
Theorem 2. Let be a non-negative symmetric evolution algebra whose attached graphs are complete, and let be its corresponding Markov evolution algebra. Then, if the following conditions are satisfied.
- 1.
- 2.
Proof. We notice that and are evolution algebras. So, the isomorphism between these two algebras can be checked by Theorem 1. Hence, the proof is straightforward. □
Consider a discrete random variable
with possible values
and probability mass function
The entropy can be explicitly written as:
where it is assumed that
.
Now, given a non-negative symmetric
evolution algebra
with structure matrix
, we define its entropy as follows:
where
is defined by (
5).
Remark 3. We notice that the considered entropy has a relationship with the Jamiolkowski entropy of a stochastic matrix [31]. Indeed, given a stochastic matrix one associates a probability distribution as follows: The Jamiolkowski entropy of is defined by One can see Hence, the entropy given by (7) can be represented as follows: The obtained formula (11) allows us to investigate in terms of , which has certain applications in information theory. Moreover, all properties of the Shannon entropy can be applied to . On the other hand, if one defines the entropy of a stochastic matrix in the sense of [32], then, via (11), one can introduce other types of entropy of evolution algebras. Moreover, given an evolution algebra with the structure matrix A with , we may define a mapping by which defines a quantum channel. Using its Jamiolkowski entropy, we define the entropy of as follows: This will allow us to further investigate the algebraic structure of with relation to the quantum channel Φ [33]. Theorem 3. Let be the non-negative symmetric evolution algebras with structural matrices and respectively. Assume that their attached graphs are complete. Then, the corresponding Markov evolution algebras are the same.
Proof. Let
. Due to the isomorphism between theses two algebras, we have
The corresponding Markov evolution algebras have the following matrices of structural constants:
respectively. Let
be an arbitrary entry of the matrix
then
We may assume that
(since the matrices are
S-matrices). Hence,
Due to the arbitrariness of we obtain . This completes the proof. □
Corollary 1. Assume that all conditions of Theorem 3 are satisfied. Then .
Remark 4. We stress that the converse of Corollary 1 need not be true. Indeed, let and be two non-negative evolution algebras with the following matrices of structural matrices: Using the condition from (12), we have for any However, Remark 5. The advantage of Theorem 3 is that, for any two non-negative evolution algebras whose matrix of structural constants is symmetric, if their entropies are different, then theses algebras are not isomorphic.
The natural question that arises is: if we have arbitrary isomorphic evolution algebras, are their entropies equal? The following example gives a negative answer.
Example 1. Let and be two dimensional evolution algebras with structural matrices Clearly, Now, Now, we may calculate the entropies for both, which are , Thus
Given the
evolution algebra
the Hadamard product is defined as
Let us denote by By we denote the evolution algebra whose structural matrix is .
Lemma 1. Assume that all conditions of Theorem 3 are satisfied and . Then
- 1.
If Then for any
- 2.
Then , if and only if
Proof. Let
and
be the structure matrices of
and
, respectively, then
, if and only if
Assume that
then
for any
Next, let
Then
if and only if
□
Remark 6. From above lemma, we emphasize the following points:
- 1.
If then and are isomorphic for any
- 2.
If with and if , then and are not isomorphic.
Now, let us consider
, which is defined by
Theorem 4. The entropy of (13) is related to the following first-order differential linear equation: Proof. Let us calculate the entropy of (
13). Due to the symmetry of
, it is enough to find the value
for the first row, the rest will process in the same manner. Hence, the value of
at
i will be denoted by
, where
The last equality can be rewritten as
Now, let
then, from (
14) we have
Thus, Equation (
16) can be rewritten as follows:
The last expression leads to the required assertion. This completes the proof. □
Let us denote with the set of all maximum entries of the row In what follows, we assume that ,
Theorem 5. Let be a non-negative symmetric evolution algebra with the structural matrix with attached graphs; it is complete. The following statements hold true:
- (i)
is non-increasing, when ;
- (ii)
- (iii)
Proof. (i). From Theorem 4, we infer that
where
and
So, the first derivative of
is given by
Next, computing the second derivative of
we have
Clearly, from the last equation, we find , then As , then Hence, is decreasing. This completes the proof of (i).
Now consider (ii). For the sake of simplicity of calculations, we may assume that
where
represent the
row of
where
Simple calculations yields that
Since
then
Therefore, This completes proof (ii).
From the (ii), the maximum value of
occurs at
Putting
in the expression
we get
But
This implies that the maximum value of
On the other hand, from (i) and (ii), we obtain that the minimum value of
Hence,
which yields (iii). □
Corollary 2. If then the following statements hold true:
- 1.
- 2.
Remark 7. From Theorem 5, we emphasize the following points:
- 1.
In Theorem 5 (i), if then is constant.
- 2.
In Theorem 5 (i), if for any k and then is constant. In this setting, the entropy reaches its maximum value. Moreover, all the Markov evolution algebras are the same.
- 3.
From Theorem 5 and Corollary 1, if the is decreasing, then we infer that is a non-isomorphic family of Markov evolution algebras. This kind of result allows us to investigate further properties of the chain of evolution algebras associated with .
- 4.
All non-negative evolution algebras with the maximum entropy are isomorphic.
Let us consider the following examples:
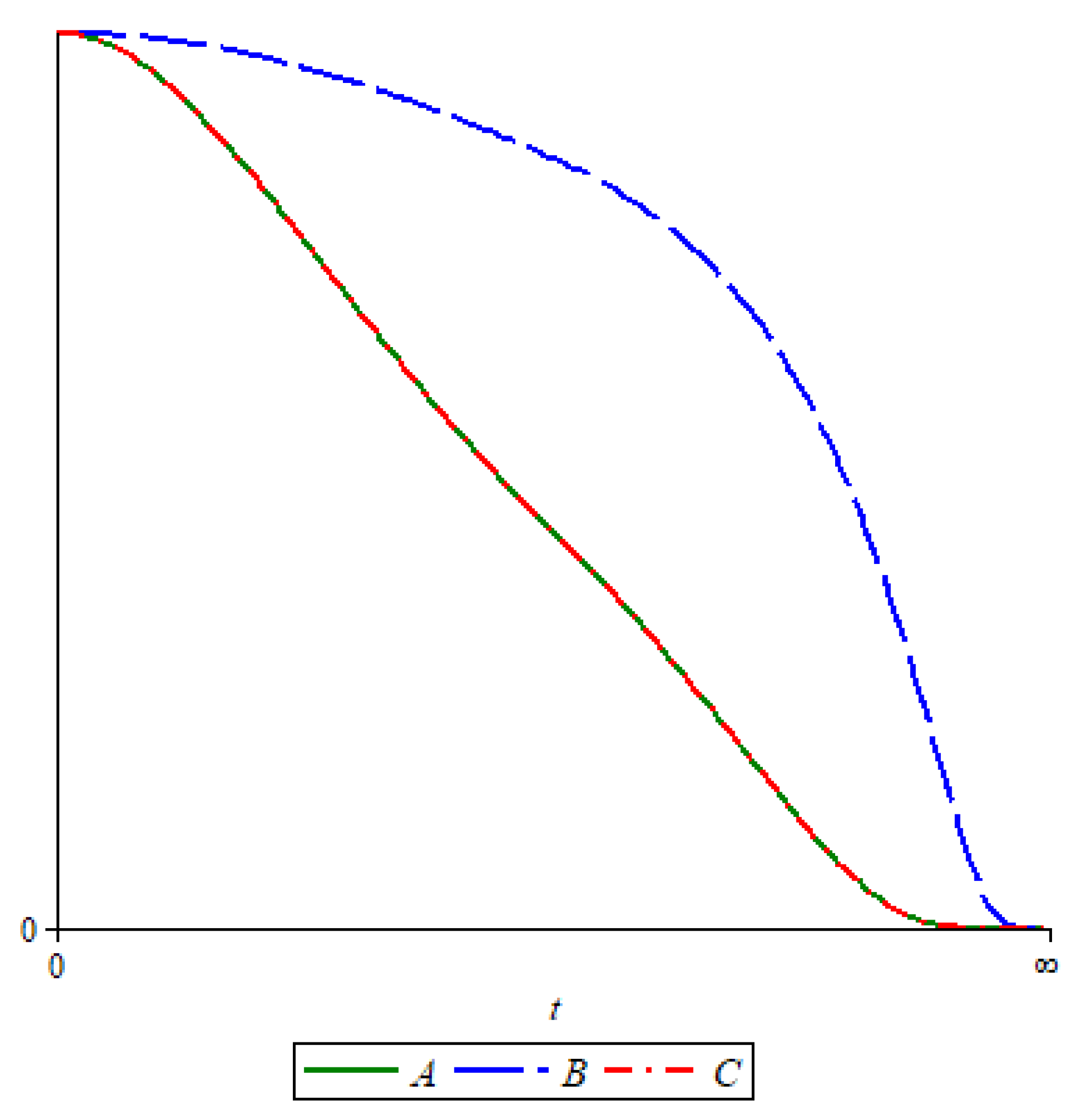
Example 2. Let and be three dimensional evolution algebras with the following structure matrices, respectively: Then, , and are, respectively, given by: Then, the corresponding Markov evolution algebras have the following structure matrices: One can see that .
Figure 1 shows the graphs of , and , and, since and , one can see that the graphs of and are identical, whereas the graph of is different. The following example is related to (4) of remark (
18).
Example 3. Let be three dimensional evolution algebras with the following structure matrices, respectively: Then, and are, respectively, given by: Then, the corresponding Markov evolution algebras have the following structure matrices: One can see that .
Since and reach the maximum entropy,
4. Relative Entropy
Suppose that we have two sets of discrete events,
and
, with the corresponding probability distributions,
and
. The
relative entropy between these two distributions is defined by
This function is a measure of the ‘distance’ between and , even though it is not metric space, since the symmetric axiom in general is not satisfied
Let
,
be non-negative symmetric
evolution algebras with matrix of structural matrices
and
. Let
and
be the corresponding stochastic matrices (see (
5)). We define the relative entropy of
A and
B as follows:
Theorem 6. Let , be non-negative symmetric evolution algebras with structural matrices and respectively. Assume that their attached graphs are complete. If then for any .
Proof. One can see that
if we write
as the row vectors
and
.
Now, we are going to compute
For a fixed
i, one has
Substituting the last expression into (
19), we obtain
The last expression can be rewritten as follows:
Since
we have
and
Hence, from (
21), we obtain
Due to the arbitrariness of we arrive at for any i. This completes the proof. □




{kind=link}