


An Enhanced Affine Projection Algorithm Based on the Adjustment of Input-Vector Number


Abstract
:1. Introduction
2. Conventional Affine Projection Algorithm
3. Enhanced Affine Projection Algorithm Based on the Adjustment of Input-Vector Number
| Algorithm 1: Re-initialization of the input-vector number. |
| , flag , , |
| : user defined. |
| for each i do |
| if () |
| flag |
| else if ( flag = 1 and ) |
| flag , , , |
| end if |
| end for |
4. Experimental Results
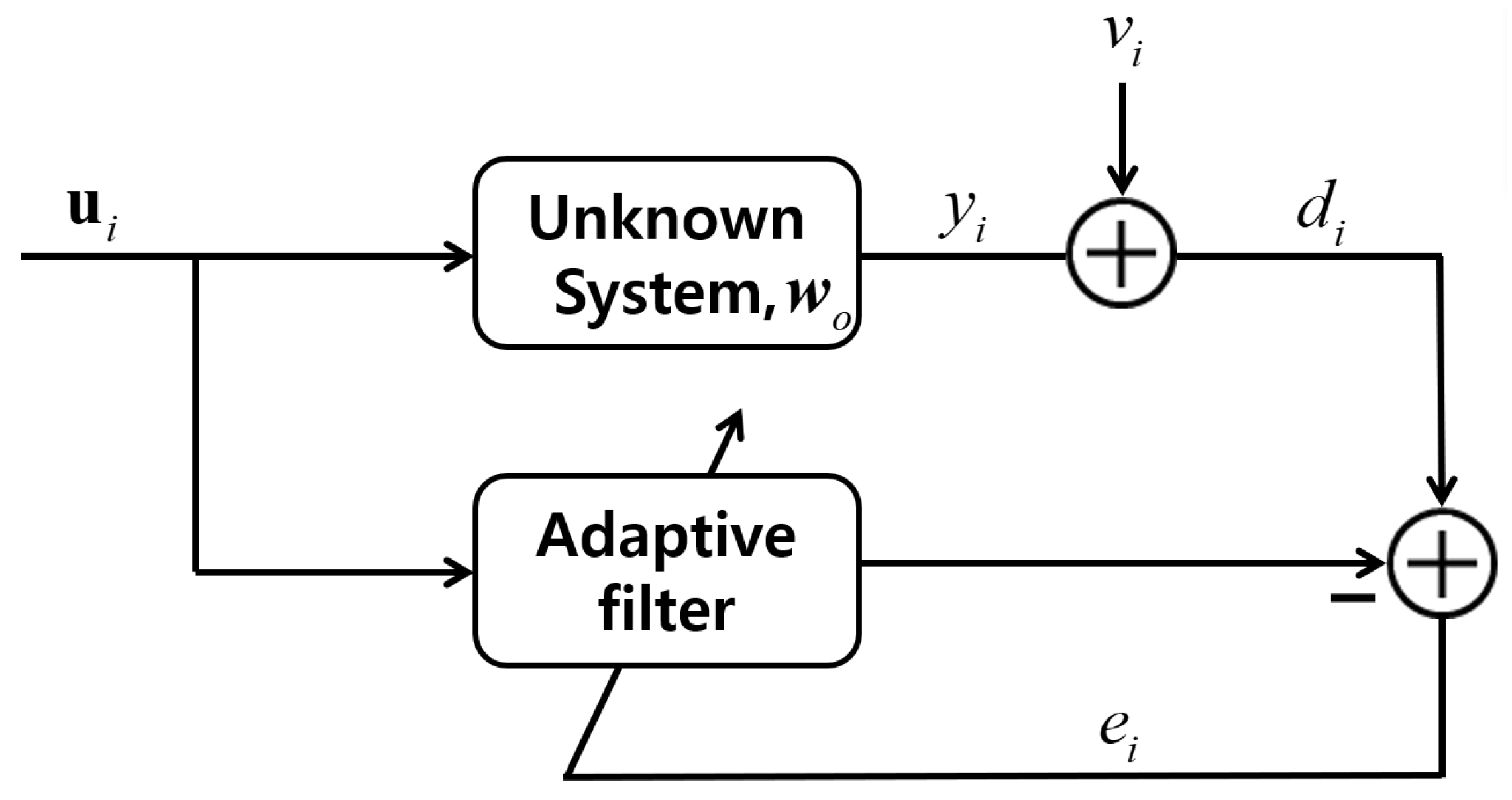
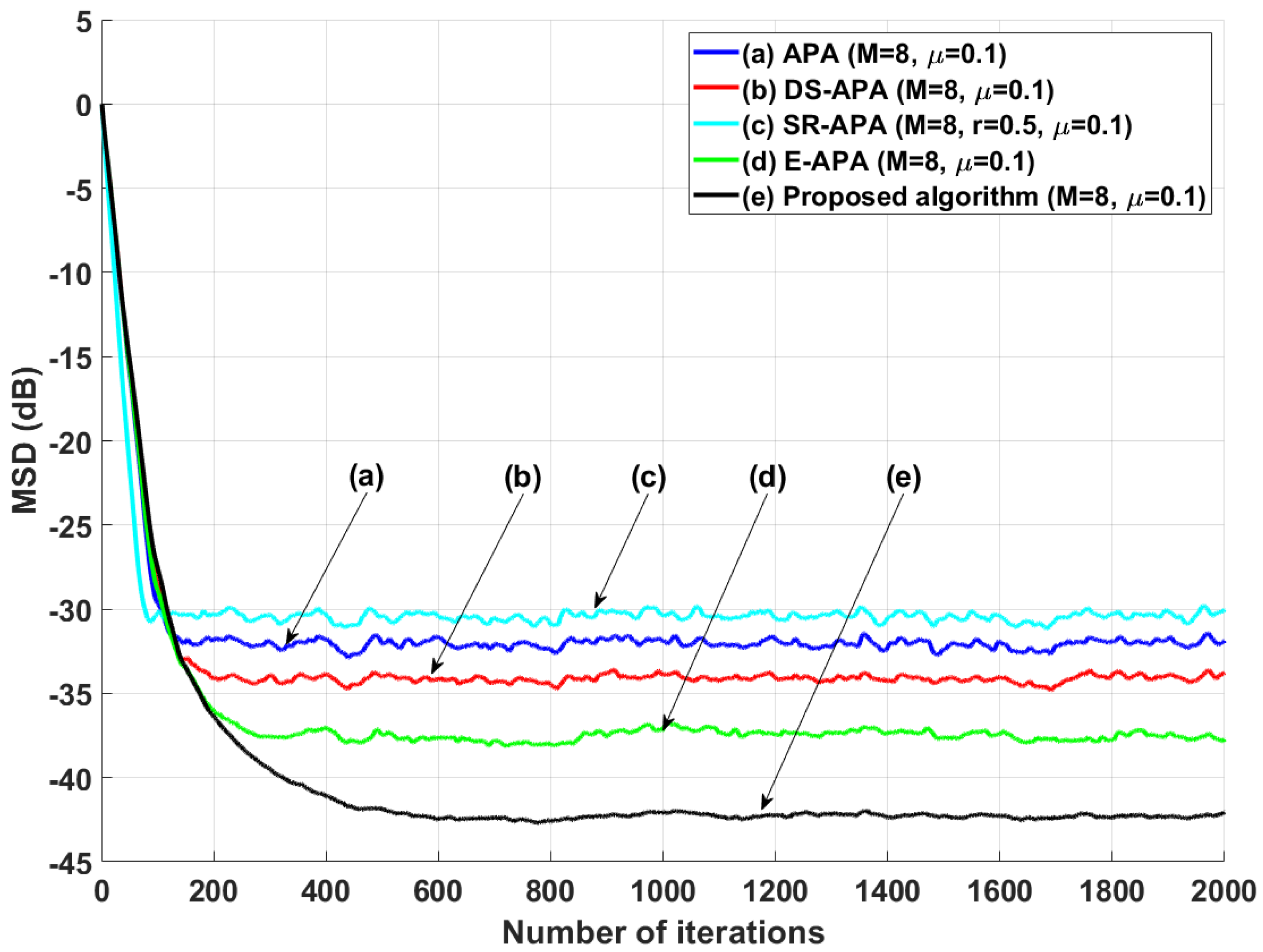
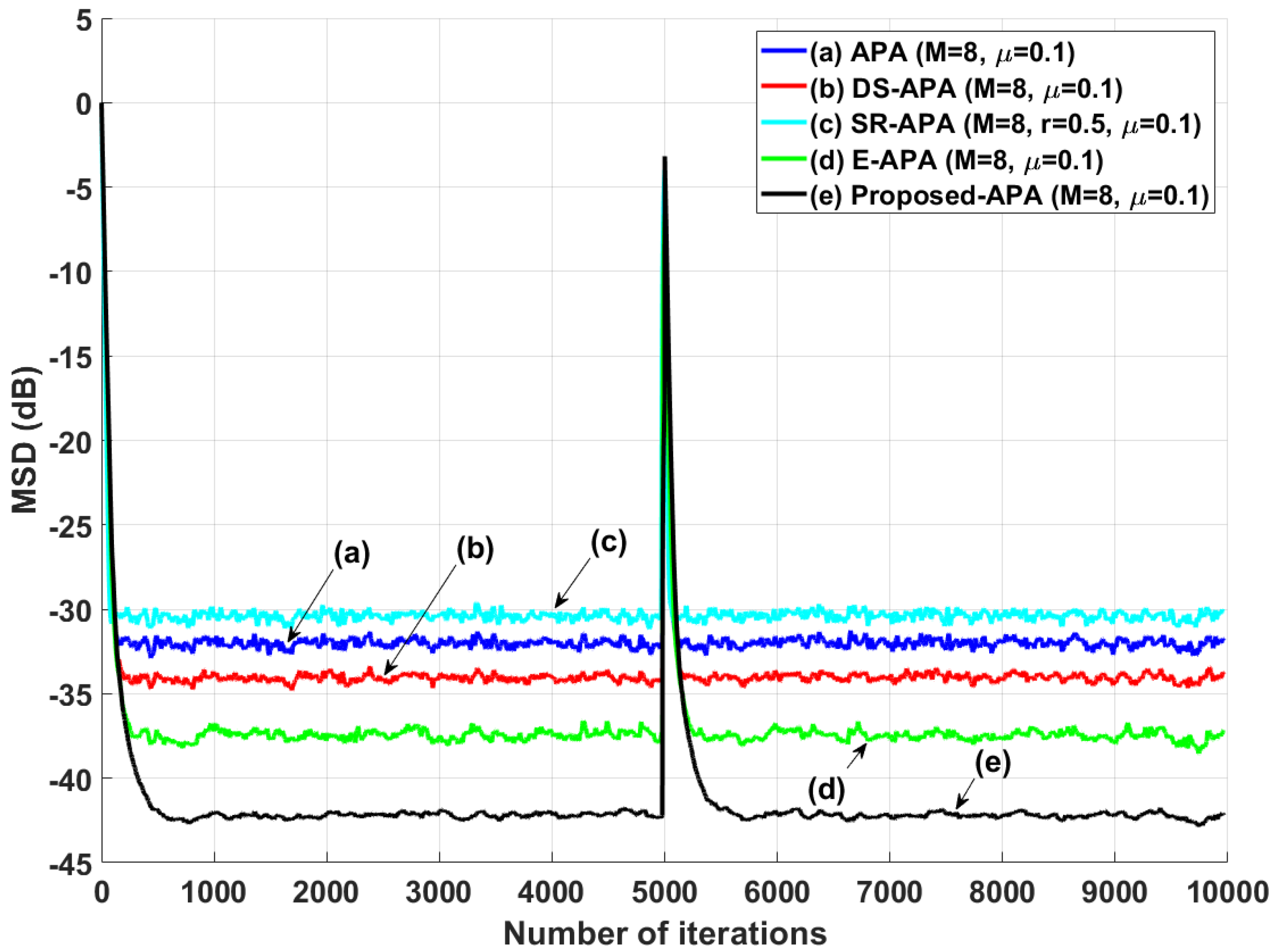
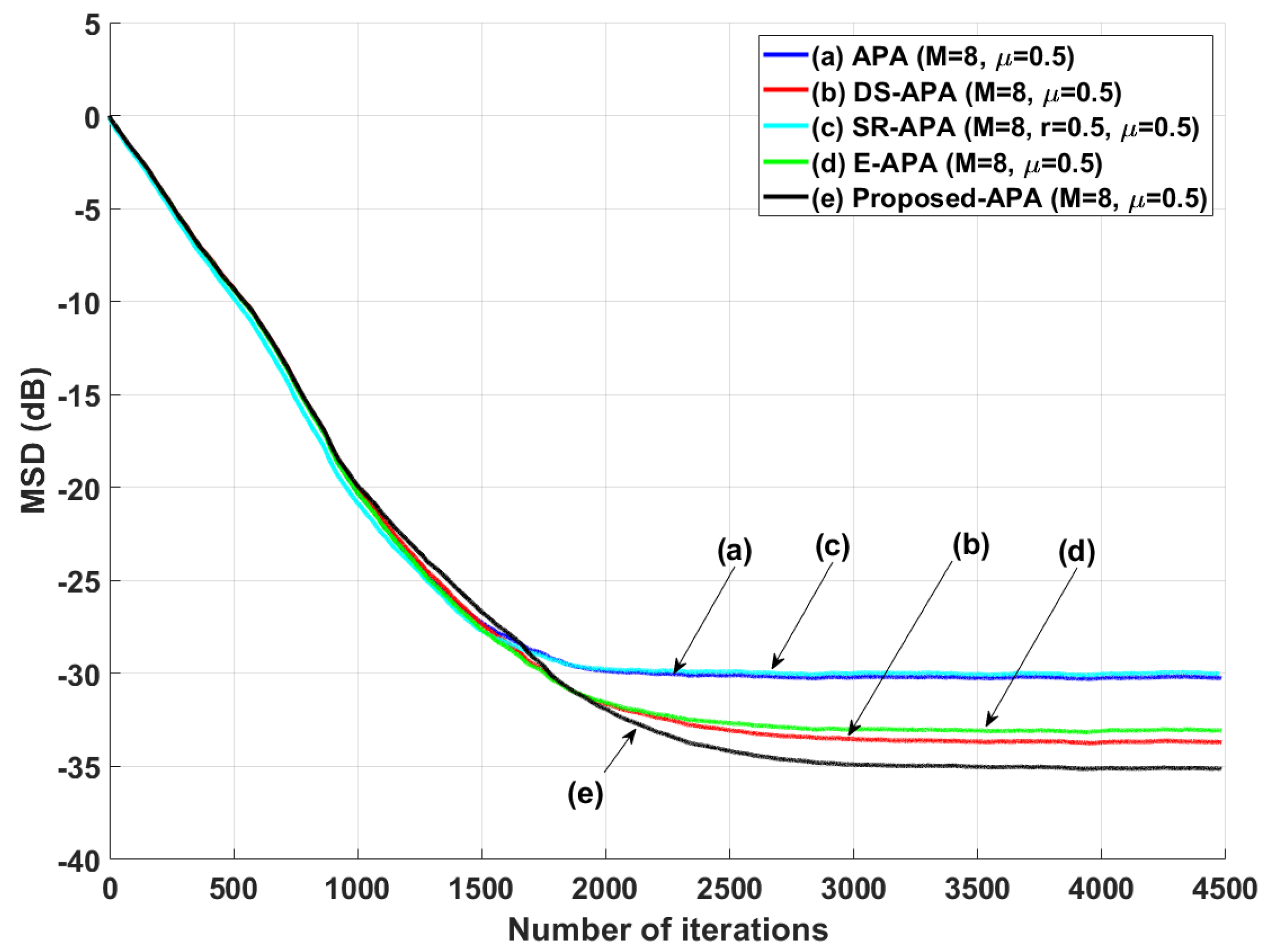
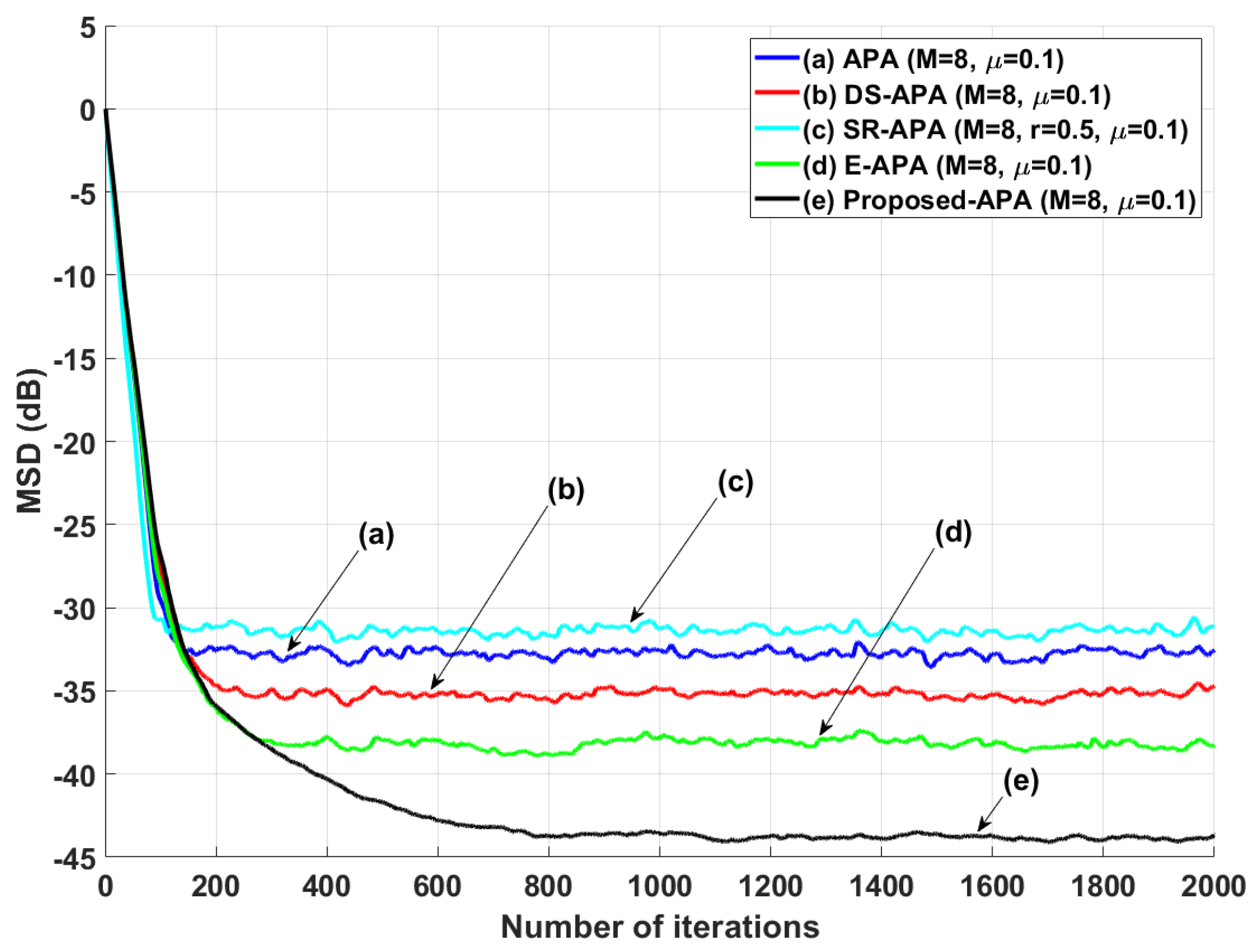
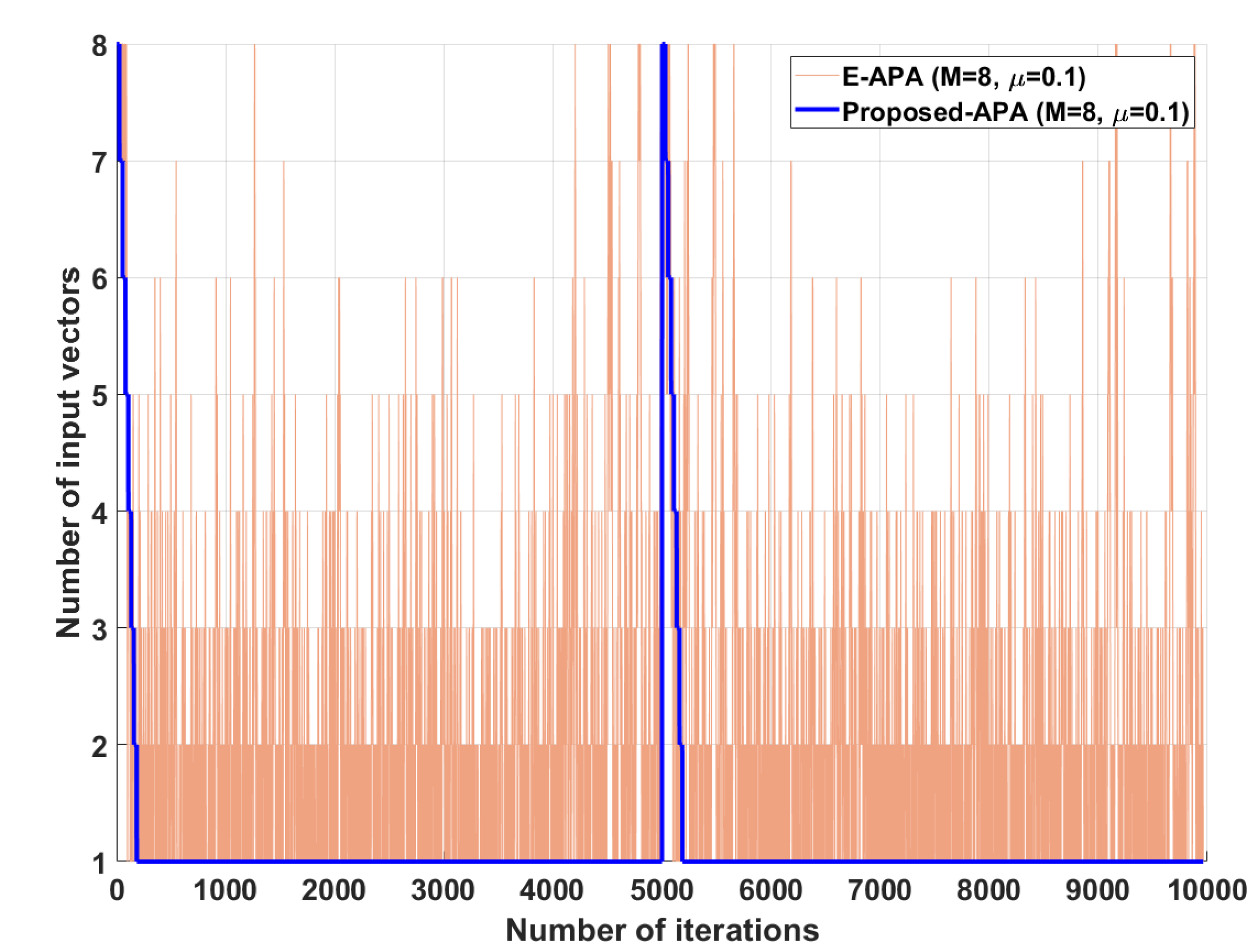
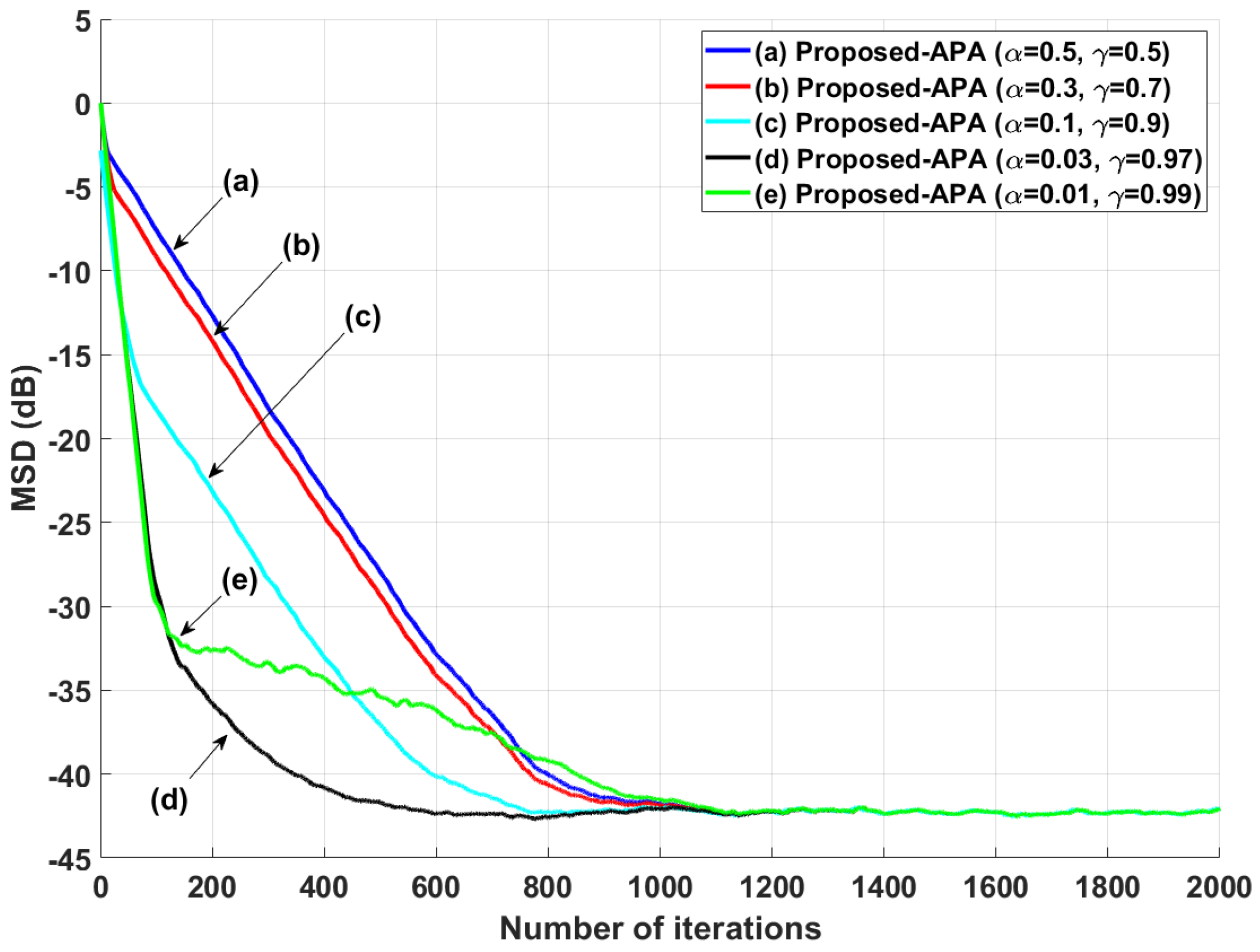
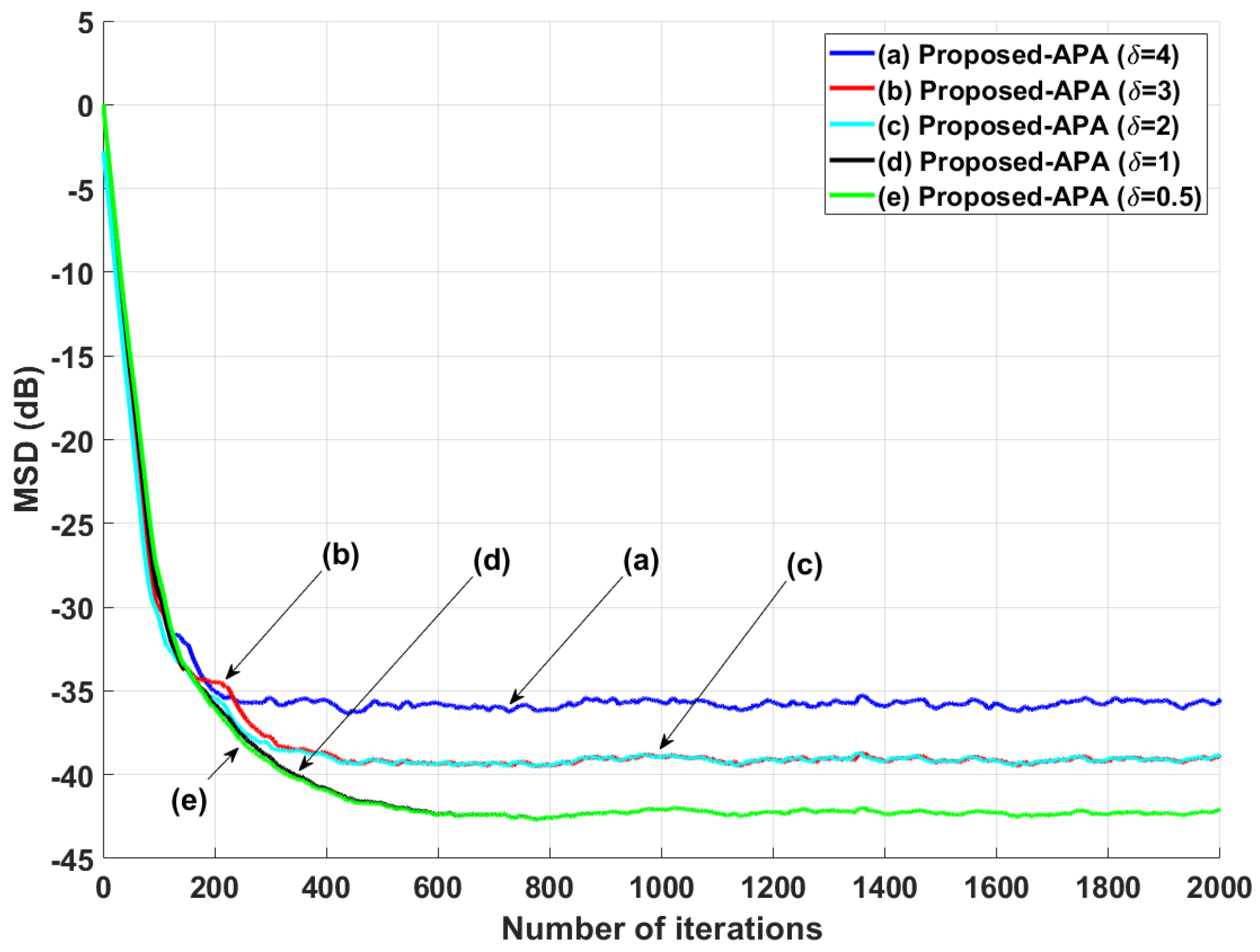
4.1. System Identification Verification for Correlated Input
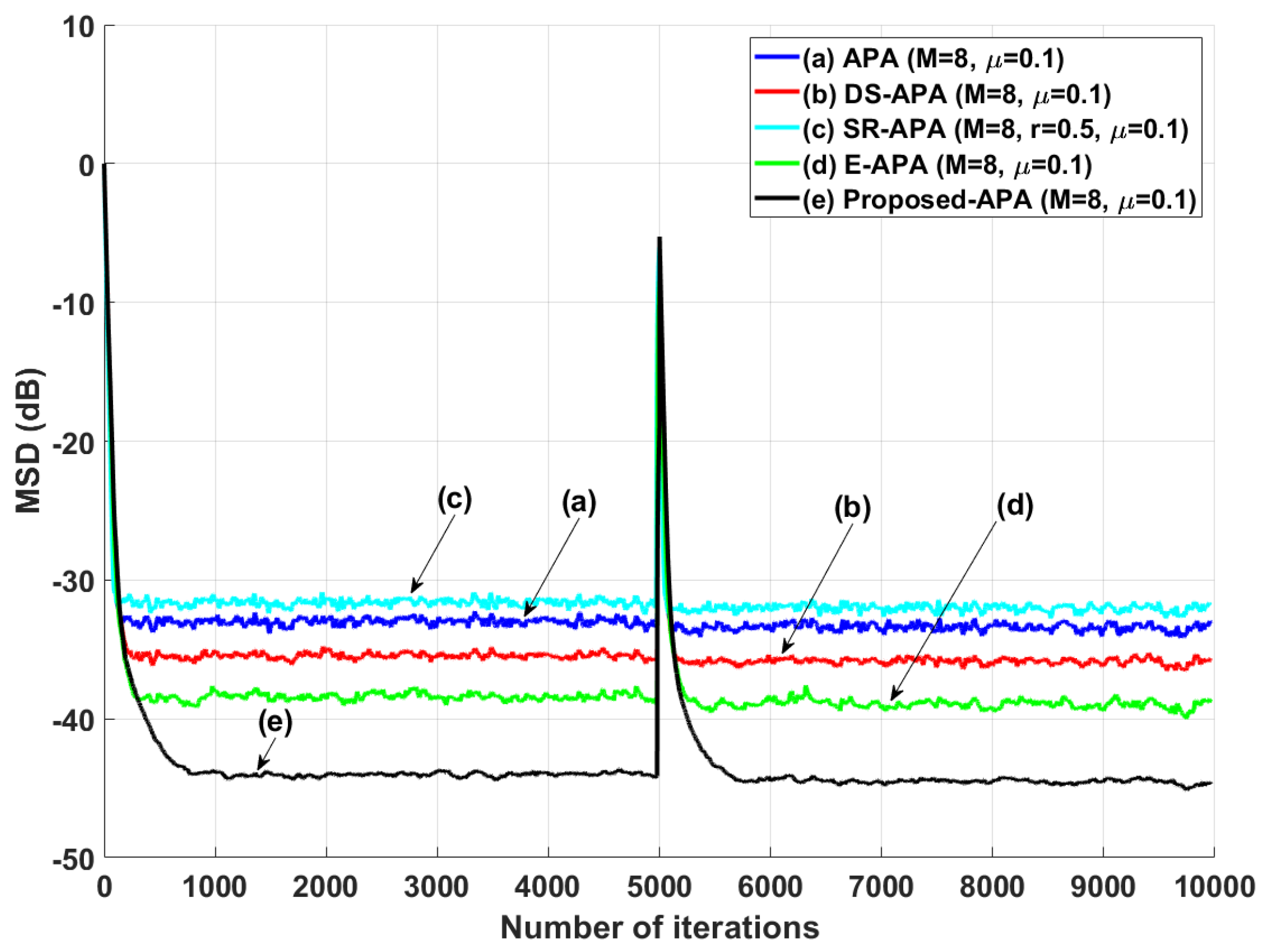
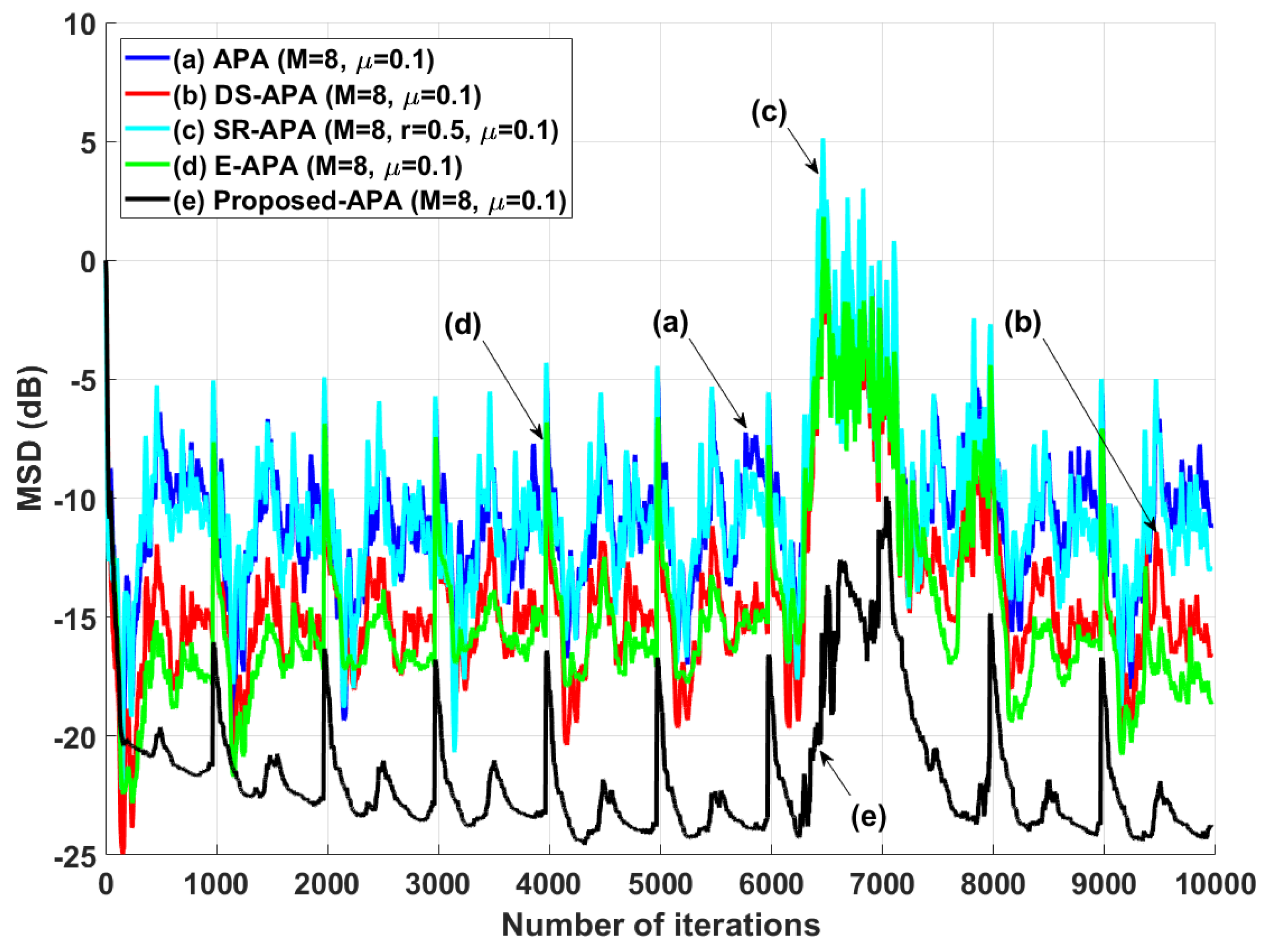
4.2. Speech Input Verification Including a Double-Talk Situation
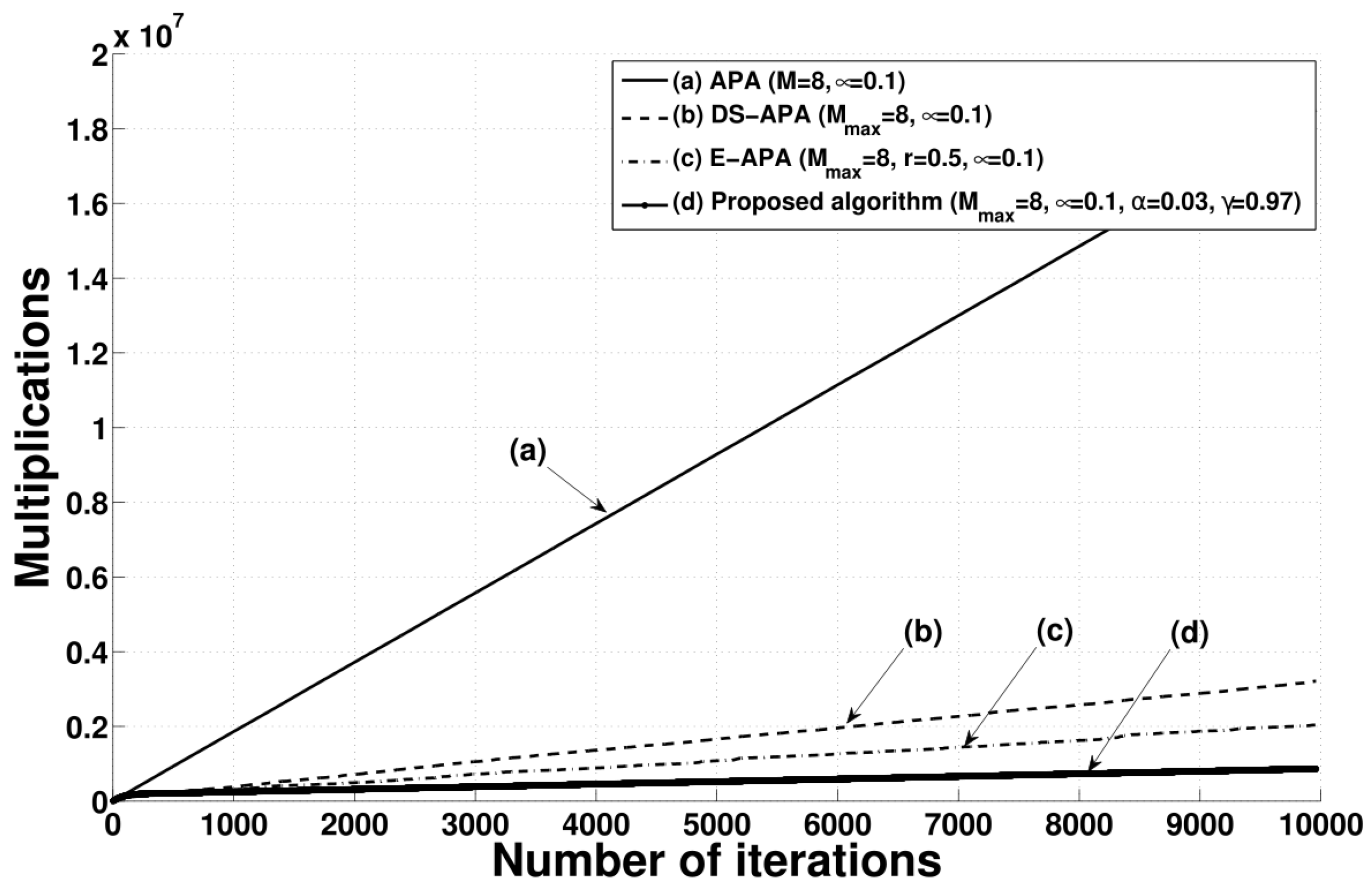
4.3. Comparison for Computational Complexity
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, R.; Zhao, H. A Novel Method for Online Extraction of Small-Angle Scattering Pulse Signals from Particles Based on Variable Forgetting Factor RLS Algorithm. Sensors 2021, 21, 5759. [Google Scholar] [CrossRef] [PubMed]
- Qian, G.; Wang, S.; Lu, H.H.C. Maximum Total Complex Correntropy for Adaptive Filter. IEEE Trans. Signal Process. 2020, 68, 978–989. [Google Scholar] [CrossRef]
- Yue, P.; Qu, H.; Zhao, J.; Wang, M. Newtonian-Type Adaptive Filtering Based on the Maximum Correntropy Criterion. Entropy 2020, 22, 922. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Wang, Y.; Yang, R.; Albu, F. A Soft Parameter Function Penalized Normalized Maximum Correntropy Criterion Algorithm for Sparse System Identification. Entropy 2017, 19, 45. [Google Scholar] [CrossRef] [Green Version]
- Shen, L.; Zakharov, Y.; Henson, B.; Morozs, N.; Mitchell, P.D. Adaptive filtering for full-duplex UWA systems with time-varying self-interference channel. IEEE Access 2020, 8, 187590–187604. [Google Scholar] [CrossRef]
- Wu, Z.; Peng, S.; Chen, B.; Zhao, H. Robust Hammerstein Adaptive Filtering under Maximum Correntropy Criterion. Entropy 2015, 17, 7149–7166. [Google Scholar] [CrossRef] [Green Version]
- Ozeki, K.; Umeda, T. An adaptive filtering algorithm using an orthogonal projection to an affine subspace and its properties. Electron. Commun. Jpn. 1984, 67, 19–27. [Google Scholar] [CrossRef]
- Pichardo, E.; Vazquez, A.; Anides, E.R.; Sanchez, J.C.; Perez, H.; Avalos, J.G.; Sanchez, G. A dual adaptive filter spike-based hardware architecture for implementation of a new active noise control structure. Electronics 2021, 10, 1945. [Google Scholar] [CrossRef]
- Yoo, J.; Shin, J.; Park, P. A bias-compensated proportionate NLMS algorithm with noisy input signals. Int. J. Commun. Syst. 2019, 32, e4167. [Google Scholar] [CrossRef]
- Li, G.; Zhang, H.; Zhao, J. Modified combined-step-size affine projection sign algorithms for robust adaptive filtering in impulsive interference environments. Symmetry 2020, 12, 385. [Google Scholar] [CrossRef] [Green Version]
- Shin, J.; Yoo, J.; Park, P. Adaptive regularisation for normalised subband adaptive filter: Mean-square performance analysis approach. IET Signal Process. 2018, 12, 1146–1153. [Google Scholar] [CrossRef]
- Jiang, Z.; Li, Y.; Huang, X. A Correntropy-Based Proportionate Affine Projection Algorithm for Estimating Sparse Channels with Impulsive Noise. Entropy 2019, 21, 555. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.; Jin, Z.; Wang, Y.; Yang, R. A Robust Sparse Adaptive Filtering Algorithm with a Correntropy Induced Metric Constraint for Broadband Multi-Path Channel Estimation. Entropy 2016, 18, 380. [Google Scholar] [CrossRef] [Green Version]
- Kong, S.J.; Hwang, K.Y.; Song, W.J. An affine projection algorithm with dynamic selection of input vectors. IEEE Signal Process. Lett. 2007, 14, 529–532. [Google Scholar] [CrossRef]
- Hwang, K.Y.; Song, W.J. An affine projection adaptive filtering algorithm with selective regressors. IEEE Trans. Circuits Syst. II Express Briefs 2007, 54, 43–46. [Google Scholar] [CrossRef]
- Kim, S.E.; Kong, S.J.; Song, W.J. An affine projection algorithm with evolving order. IEEE Signal Process. Lett. 2009, 16, 937–940. [Google Scholar]
- Gong, Y.; Cowan, C.F.N. An LMS style variable tap-length algorithm for structure adaptation. IEEE Trans. Signal Process. 2005, 53, 2400–2407. [Google Scholar] [CrossRef] [Green Version]
- Chang, M.S.; Kong, N.W.; Park, P.G. Variable regularized least-squares algorithm: One-step-ahead cost function with equivalent optimality. Signal Process. 2011, 91, 1224–1228. [Google Scholar] [CrossRef]
- Yousef, N.R.; Sayed, A.H. A unified approach to the steady-state and tracking analyses of adaptive filters. IEEE Trans. Signal Process. 2001, 49, 314–324. [Google Scholar] [CrossRef]
- Benesty, J.; Rey, H.; Vega, L.R.; Tressens, S. A nonparametric VSS NLMS algorithms. IEEE Signal Process. Lett. 2006, 13, 581–584. [Google Scholar] [CrossRef]
- Iqbal, M.A.; Grant, S.L. Novel variable step size NLMS algorithms for echo cancellation. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008; pp. 241–244. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| APA | DS-APA | E-APA | Proposed APA | |
|---|---|---|---|---|
| Input-Vector | ||||
| Number | M | |||
| #(comparisons) | 0 | M | 2 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, J.; Kim, J.; Kim, T.-K.; Yoo, J. An Enhanced Affine Projection Algorithm Based on the Adjustment of Input-Vector Number. Entropy 2022, 24, 431. https://doi.org/10.3390/e24030431
Shin J, Kim J, Kim T-K, Yoo J. An Enhanced Affine Projection Algorithm Based on the Adjustment of Input-Vector Number. Entropy. 2022; 24(3):431. https://doi.org/10.3390/e24030431
Chicago/Turabian StyleShin, Jaewook, Jeesu Kim, Tae-Kyoung Kim, and Jinwoo Yoo. 2022. "An Enhanced Affine Projection Algorithm Based on the Adjustment of Input-Vector Number" Entropy 24, no. 3: 431. https://doi.org/10.3390/e24030431
APA StyleShin, J., Kim, J., Kim, T.-K., & Yoo, J. (2022). An Enhanced Affine Projection Algorithm Based on the Adjustment of Input-Vector Number. Entropy, 24(3), 431. https://doi.org/10.3390/e24030431