
A Modular Grad-Div Stabilization Method for Time-Dependent Thermally Coupled MHD Equations

Abstract
:1. Introduction
2. Preliminaries
3. A Modular Grad-Div Stabilization Method for Time-Dependent Thermally Coupled MHD Equations
4. Stability Analysis
| Algorithm 1 A Modular Grad-Div Stabilization Method |
Step 1: For all , find such that
Step 2: For all , find such that
|
5. Error Analysis
6. Numerical Experiment
6.1. An Exact Solution Problem
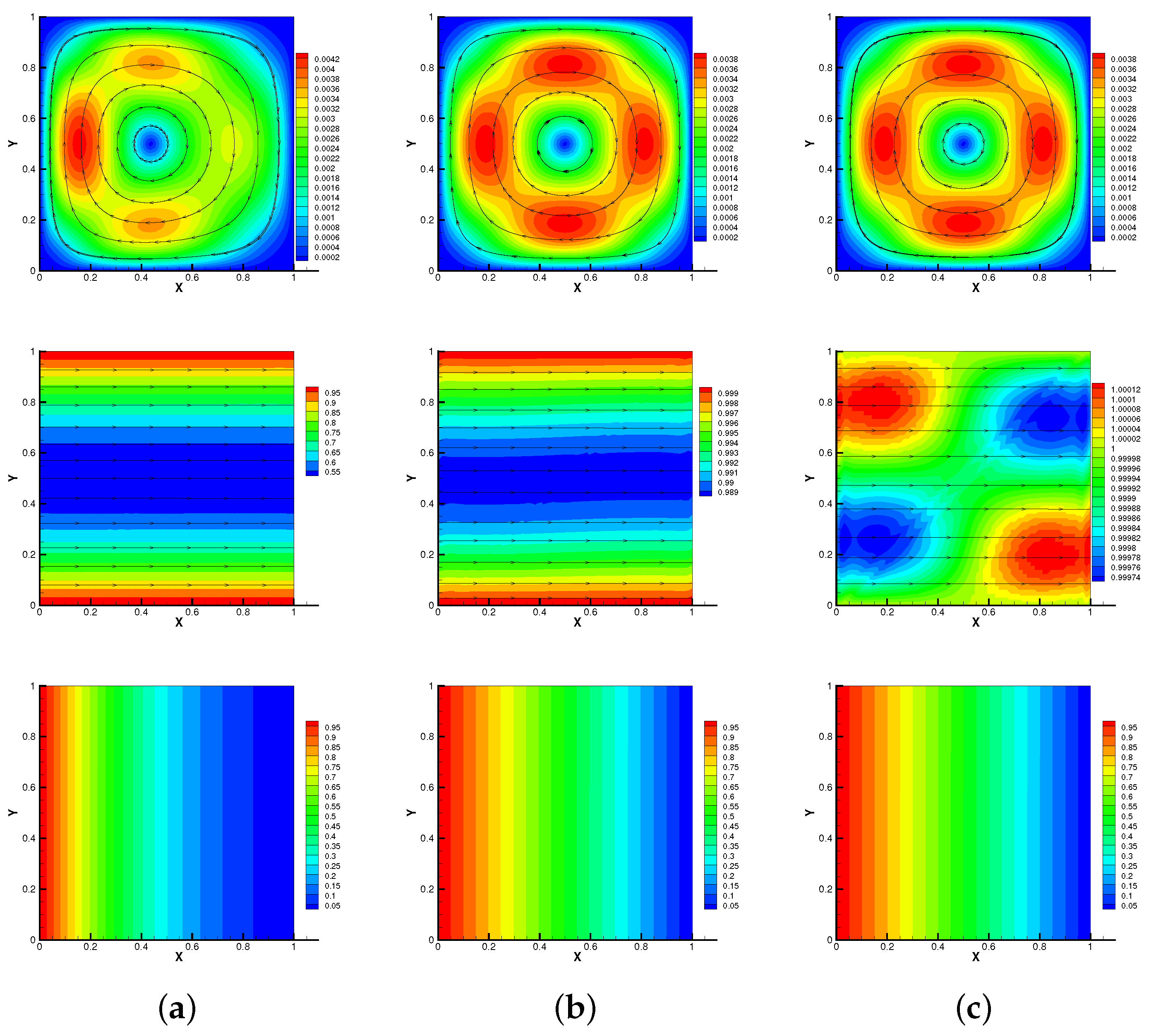
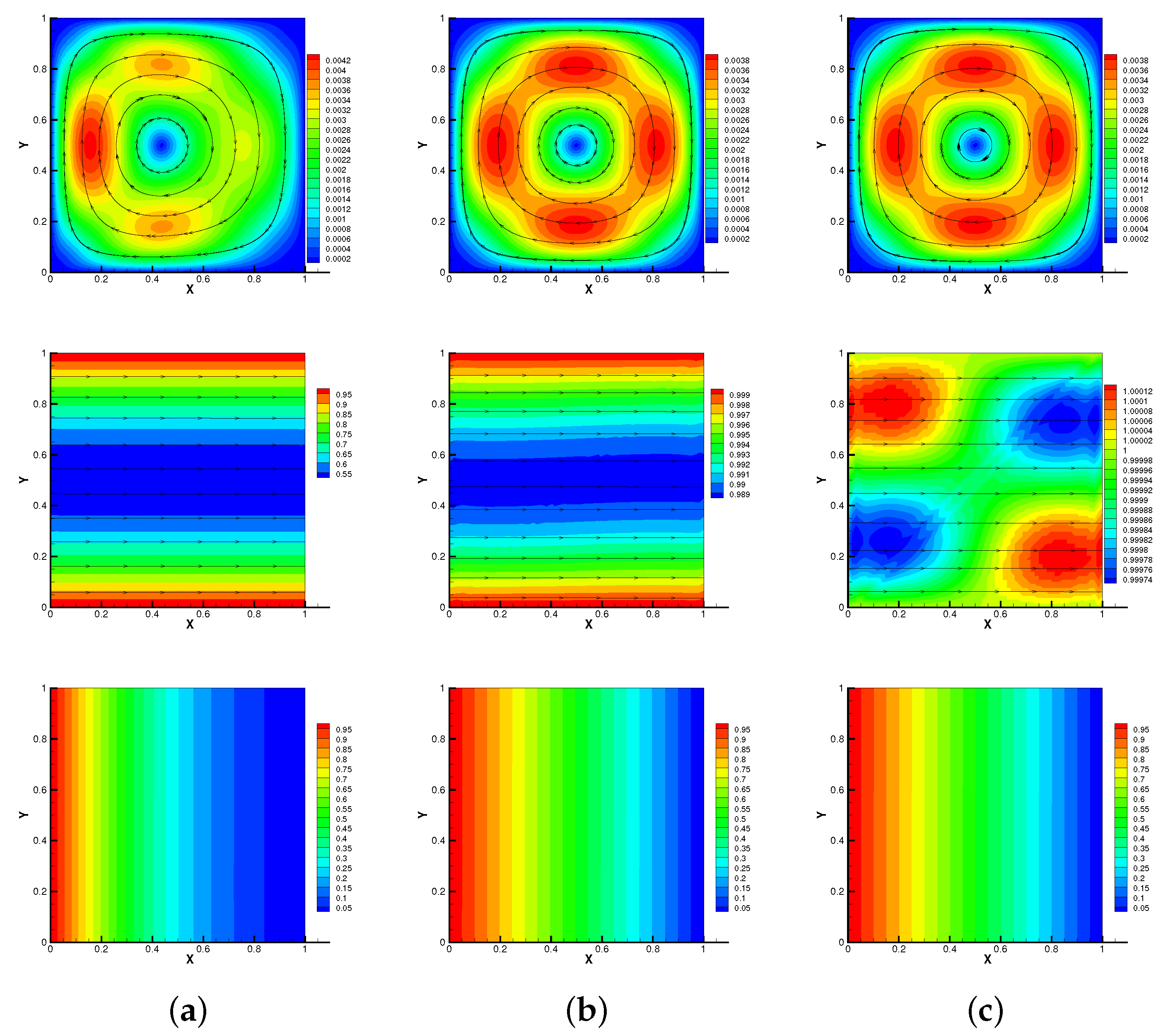
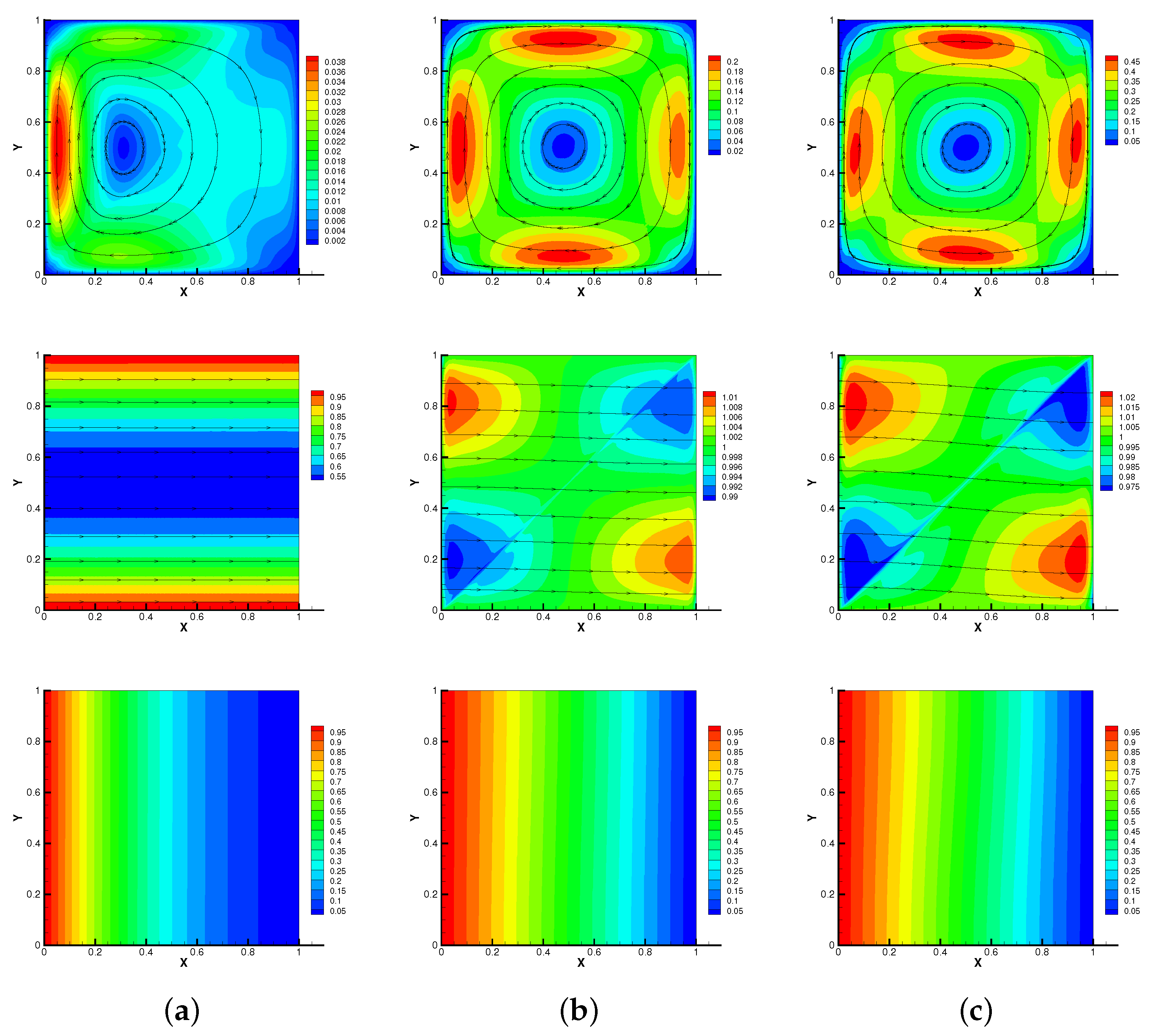
6.2. Thermally Driven Cavity Flow Problem
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Davidson, P.A. Book review: An Introduction to Magnetohydrodynamics. Phys. Today 2002, 55, 56–57. [Google Scholar]
- Lifschitz, A.E. Magnetohydrodynamics and Spectral Theory; Springer: Dordrecht, The Netherlands, 1989. [Google Scholar]
- Moreau, R.J. Magnetohydrodynamics (Fluid Mechanics and Its Applications); Translated from the French by A. F. Wright; Kluwer Academic Publishers Group: Dordrecht, The Netherlands, 1990. [Google Scholar]
- Su, H.; Xu, J.; Feng, X. Optimal convergence analysis of two-level nonconforming finite element iterative methods for 2D/3D MHD equations. Entropy 2022, 24, 587. [Google Scholar] [CrossRef] [PubMed]
- Ding, Q.; Long, X.; Mao, S. Convergence analysis of Crank-Nicolson extrapolated fully discrete scheme for thermally coupled incompressible magnetohydrodynamic system. Appl. Numer. Math. 2020, 157, 522–543. [Google Scholar]
- Meir, A.J. Thermally coupled magnetohydrodynamics flow. Appl. Math. Comput. 1994, 65, 79–94. [Google Scholar] [CrossRef]
- Meir, A.J. Thermally coupled, stationary, incompressible MHD flow; existence, uniqueness, and finite element approximation. Numer. Meth. Part. Differ. Equ. 2010, 11, 311–337. [Google Scholar] [CrossRef]
- Codina, R.; Hern<i>a</i>´ndez, N. Approximation of the thermally coupled MHD problem using a stabilized finite element method. J. Comput. Phys. 2011, 230, 1281–1303. [Google Scholar] [CrossRef]
- Ravindran, S.S. A decoupled Crank-Nicolson time-stepping scheme for thermally coupled magneto-hydrodynamic system. Int. J. Optim. Control. Theor. Appl. (IJOCTA) 2017, 8, 43. [Google Scholar]
- Ravindran, S.S. Partitioned time-stepping scheme for an MHD system with temperature-dependent coefficients. IMA J. Numer. Anal. 2018, 39, 1860–1887. [Google Scholar]
- Yang, J.; Zhang, T. Stability and convergence of iterative finite element methods for the thermally coupled incompressible MHD flow. Int. J. Numer. Method. Heat 2020, 30, 5103–5141. [Google Scholar] [CrossRef]
- Ding, Q.; Long, X.; Mao, S. Convergence analysis of a fully discrete finite element method for thermally coupled incompressible MHD problems with temperature-dependent coefficients. ESAIM Math. Model. Numer. 2022, 56, 969–1005. [Google Scholar]
- Si, Z.; Lu, J.; Wang, Y. Unconditional stability and error estimates of the modified characteristics FEMs for the time-dependent thermally coupled incompressible MHD equations. Comput. Fluids 2022, 240, 105427. [Google Scholar] [CrossRef]
- Si, Z.; Wang, M.; Wang, Y. A projection method for the non-stationary incompressible MHD coupled with the heat equations. Appl. Math. Comput. 2022, 428, 127217. [Google Scholar] [CrossRef]
- Tang, Z.; An, R. Error analysis of the second-order BDF finite element scheme for the thermally coupled incompressible magnetohydrodynamic system. Comput. Math. Appl. 2022, 118, 110–119. [Google Scholar] [CrossRef]
- Zhang, Z.; Su, H.; Feng, X. Linear full decoupling, velocity correction method for unsteady thermally coupled incompressible magneto-hydrodynamic equations. Entropy 2022, 24, 1159. [Google Scholar] [CrossRef] [PubMed]
- Franca, L.P.; Hughes, T.J. Two classes of mixed finite element methods. Comput. Methods Appl. Mech. Eng. 1988, 69, 89–129. [Google Scholar] [CrossRef]
- Olshanskii, M.; Reusken, A. Grad-div stablilization for stokes equations. Math. Comput. 2004, 73, 1699–1718. [Google Scholar] [CrossRef]
- Olshanskii, M.; Lube, G.; Heister, T.; Löwe, J. Grad-div stabilization and subgrid pressure models for the incompressible Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 2009, 198, 3975–3988. [Google Scholar] [CrossRef]
- Qin, Y.; Hou, Y.; Huang, P.; Wang, Y. Numerical analysis of two grad-div stabilization methods for the time-dependent Stokes/Darcy model. Comput. Math. Appl. 2020, 79, 817–832. [Google Scholar]
- Zeng, Y.; Huang, P. A grad-div stabilized projection finite element method for a double-diffusive natural convection model. Numer. Heat Transf. B-Fund. 2020, 78, 110–123. [Google Scholar] [CrossRef]
- Jenkins, E.W.; John, V.; Linke, A.; Rebholz, L.G. On the parameter choice in grad-div stabilization for the Stokes equations. Adv. Comput. Math. 2014, 40, 491–516. [Google Scholar] [CrossRef]
- Linke, A.; Rebholz, L.G.; Wilson, N.E. On the convergence rate of grad-div stabilized Taylor-Hood to Scott-Vogelius solutions for incompressible flow problems. J. Math. Anal. Appl. 2011, 381, 612–626. [Google Scholar] [CrossRef]
- Le Borne, S.; Rebholz, L.G. Preconditioning sparse grad-div/augmented Lagrangian stabilized saddle point systems. Comput. Visual. Sci. 2013, 16, 259–269. [Google Scholar] [CrossRef]
- Glowinski, R.; Le Tallec, P. Augmented Lagrangian and Operator-Splitting Methods in Nonlinear Mechanics; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1989. [Google Scholar]
- Fiordilino, J.A.; Layton, W.; Rong, Y. An efficient and modular grad-div stabilization. Comput. Methods Appl. Mech. Eng. 2018, 335, 327–346. [Google Scholar] [CrossRef]
- Rong, Y.; Fiordilino, J.A. Numerical analysis of a BDF2 modular grad-div stabilization method for the Navier-Stokes equations. J. Sci. Comput. 2020, 82, 66. [Google Scholar] [CrossRef]
- Lu, X.; Huang, P. A modular grad-div stabilization for the 2D/3D nonstationary incompressible magnetohydrodynamic equations. J. Sci. Comput. 2020, 82, 3. [Google Scholar] [CrossRef]
- Akbas, M.; Rebholz, L.G. Modular grad-div stabilization for the incompressible nonisothermal fluid flows. Appl. Math. Comput. 2021, 393, 125748. [Google Scholar]
- Li, W.; Fang, J.; Qin, Y.; Huang, P. Rotational pressure-correction method for the Stokes/Darcy model based on the modular grad-div stabilization. Appl. Numer. Math. 2021, 160, 451–465. [Google Scholar] [CrossRef]
- John, V.; Linke, A.; Medron, C.; Neilan, M.; Rebholz, L.G. On the divergence constraint in mixed finite element methods for incompressible flows. SIAM Rev. 2017, 59, 492–544. [Google Scholar] [CrossRef]
- He, Y.; Li, J. Convergence of three iterative methods based on the finite element discretization for the stationary Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 2009, 198, 1351–1359. [Google Scholar] [CrossRef]
- Layton, W. Introduction to the Numerical Analysis of Incompressible Viscous Flows; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2008. [Google Scholar]
- He, Y. Unconditional convergence of the Euler semi-implicit scheme for the three-dimensional incompressible MHD equations. IMA J. Numer. Anal. 2015, 35, 767–801. [Google Scholar] [CrossRef]
- Dong, X.; He, Y. Optimal convergence analysis of Crank-Nicolson extrapolation scheme for the three-dimensional incompressible magnetohydrodynamics. Comput. Math. Appl. 2018, 76, 2678–2700. [Google Scholar] [CrossRef]
- Wu, J.; Feng, X.; Liu, F. Pressure-correction projection FEM for time-dependent natural convection problem. Commun. Comput. Phys. 2017, 21, 1090–1117. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Rate | Rate | Rate | Rate | |||||
|---|---|---|---|---|---|---|---|---|
| 4 | - | - | - | - | ||||
| 8 | 0.98 | 1.75 | 1.72 | 0.97 | ||||
| 16 | 1.01 | 2.06 | 1.69 | 0.99 | ||||
| 32 | 1.00 | 2.05 | 1.66 | 1.00 | ||||
| 64 | 1.01 | 2.01 | 1.55 | 1.00 | ||||
| Rate | Rate | Rate | ||||||
| 4 | – | – | – | |||||
| 8 | 1.85 | 0.95 | 1.91 | |||||
| 16 | 1.96 | 0.98 | 1.97 | |||||
| 32 | 2.00 | 1.00 | 1.99 | |||||
| 64 | 2.00 | 1.00 | 2.00 |
| - | - | - | - | |||||
|---|---|---|---|---|---|---|---|---|
| No-Stab | Modular | No-Stab | Modular | No-Stab | Modular | No-Stab | Modular | |
| 1 | ||||||||
| 1.26 | 2.00 | |||||||
| 4.13 | 6.56 | |||||||
| 5.17e-02 | 5.02 | 7.98 |
| 0 | 0.1 | 0.1 | 1 | ||||||
| 0 | 1 | 1 | 1 | ||||||
| 0 | 10 | 10 | 1 | ||||||
| 0 | 100 | 100 | 1 | ||||||
| 0 | 1000 | 1000 | 1 | ||||||
| 0 | 10,000 | 10,000 | 1 | ||||||
| 0 | 100,000 | 100,000 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Su, H. A Modular Grad-Div Stabilization Method for Time-Dependent Thermally Coupled MHD Equations. Entropy 2022, 24, 1336. https://doi.org/10.3390/e24101336
Li X, Su H. A Modular Grad-Div Stabilization Method for Time-Dependent Thermally Coupled MHD Equations. Entropy. 2022; 24(10):1336. https://doi.org/10.3390/e24101336
Chicago/Turabian StyleLi, Xianzhu, and Haiyan Su. 2022. "A Modular Grad-Div Stabilization Method for Time-Dependent Thermally Coupled MHD Equations" Entropy 24, no. 10: 1336. https://doi.org/10.3390/e24101336
APA StyleLi, X., & Su, H. (2022). A Modular Grad-Div Stabilization Method for Time-Dependent Thermally Coupled MHD Equations. Entropy, 24(10), 1336. https://doi.org/10.3390/e24101336