
Adaptive Two-Step Bearing-Only Underwater Uncooperative Target Tracking with Uncertain Underwater Disturbances




Abstract
:1. Introduction
- First, a modified Sage-Husa online noise estimator was developed to simultaneously estimate the uncertain process noise and measurement noise during the underwater uncooperative target tracking procedure;
- Second, a negative matrix modification method was utilized in the first step of the ATSF to ensure the time update process was steady. In addition, a regularized Newton-Gauss iteration technique was used in the measurement updating procedure to increase the robustness of the numerical recursion operation;
- Finally, an adaptive two-step filter (ATSF) that combines an online noise estimator and a robust numerical recursive technique was used to robustly and accurately track the underwater uncooperative target.
2. Problem Formulation
2.1. Linear Kinematic Model of the Underwater Uncooperative Target
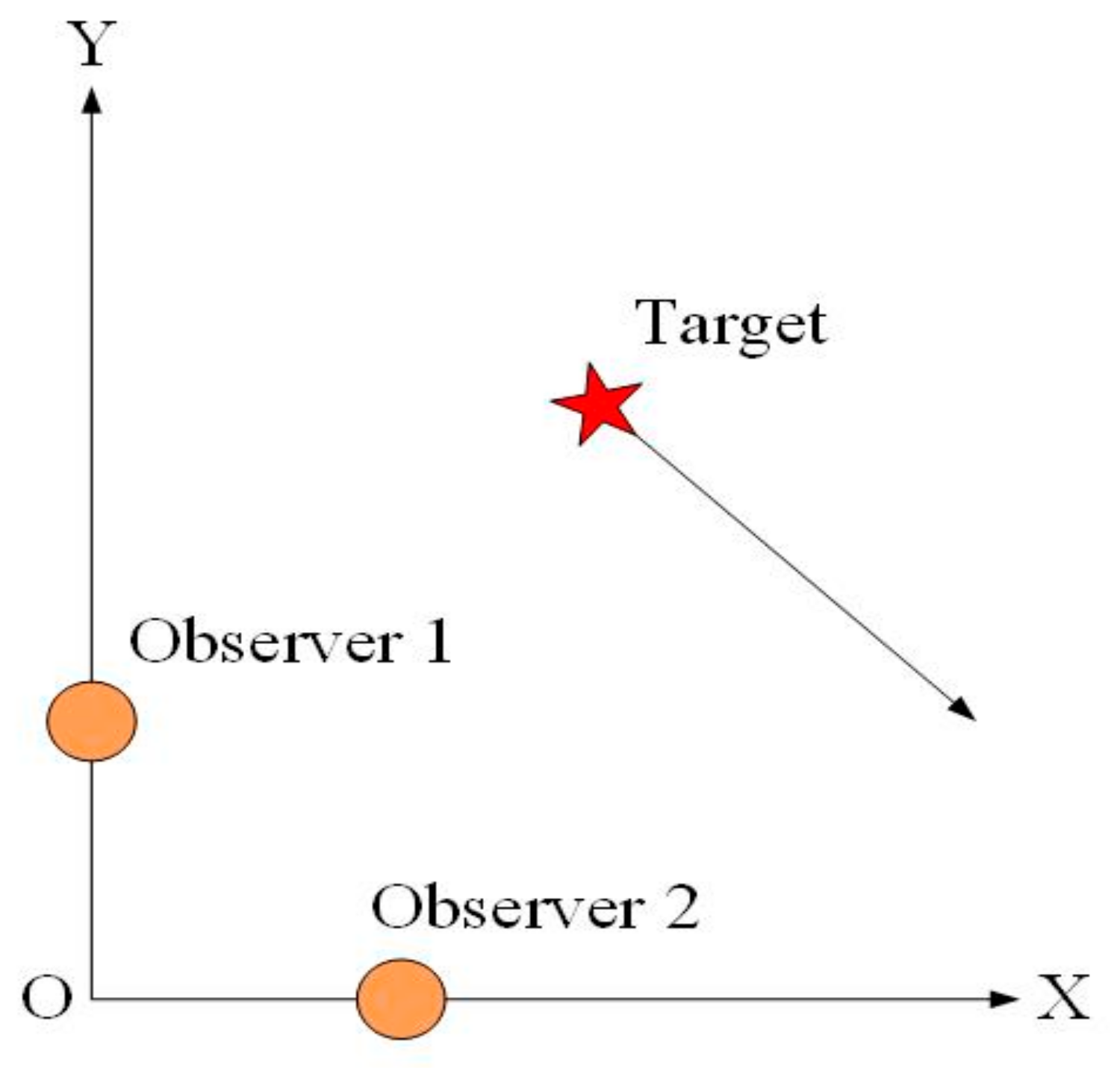
2.2. Nonlinear Bearing-Only Measurement Model by Two Observers
3. Nonlinear Least-Squares Estimation and the Traditional Two-Step Filter for Bearing-Only Underwater Uncooperative Target Tracking
3.1. Nonlinear Least-Squares Estimation for Underwater Uncooperative Target Tracking
3.2. Traditional Two-Step Filter for Bearing-Only Underwater Uncooperative Tracking
- Time update:
- Measurement update:where and are the Jacobian matrices of the extended state at and , respectively.
| Algorithm 1: Traditional two-step filter for bearing-only underwater uncooperative tracking. |
|
4. Adaptive Two-Step Bearing-Only Underwater Uncooperative Target Tracking
4.1. Modified Sage-Husa Online Noise Estimation
4.2. First-Step Negative Matrix Correction
4.3. Second-Step Regularized Newton-Gauss Iteration
4.4. Adaptive Two-Step Filter for Bearing-Only Underwater Uncooperative Target Tracking
| Algorithm 2: Adaptive two-step filter for bearing-only underwater uncooperative tracking. |
|
5. Simulations and Discussions
5.1. Simulation Scenario
5.2. Simulation Results and Discussions
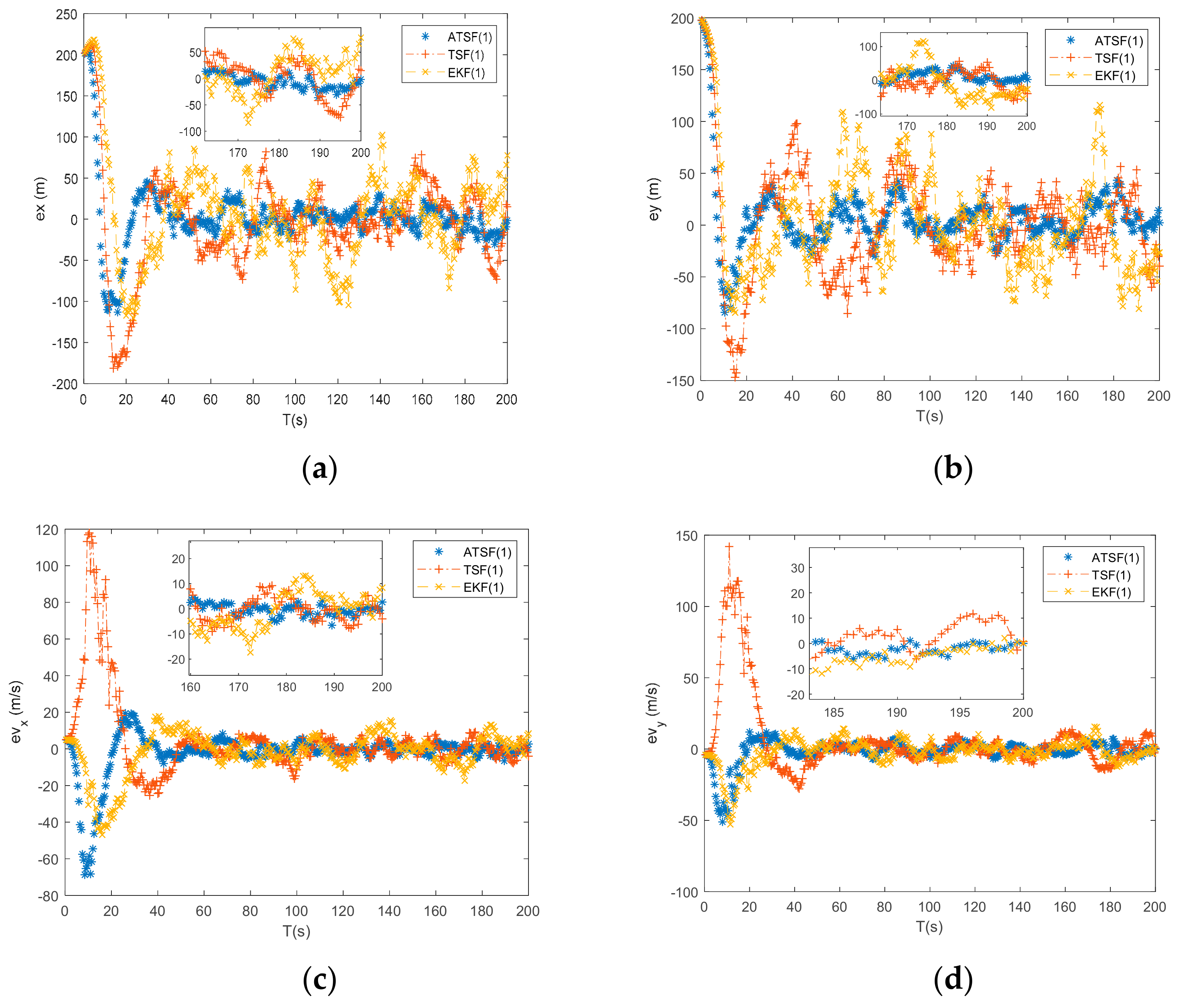
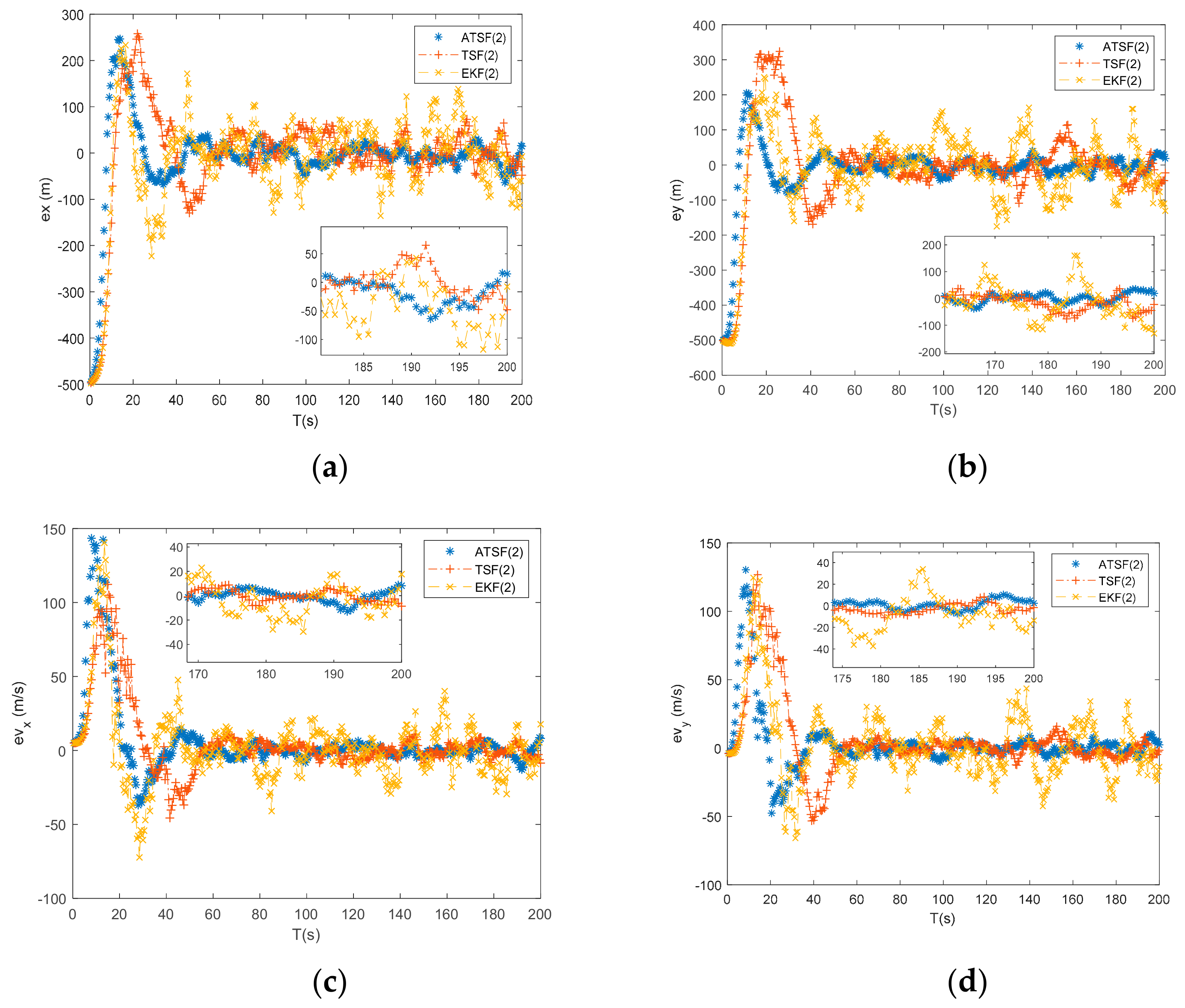
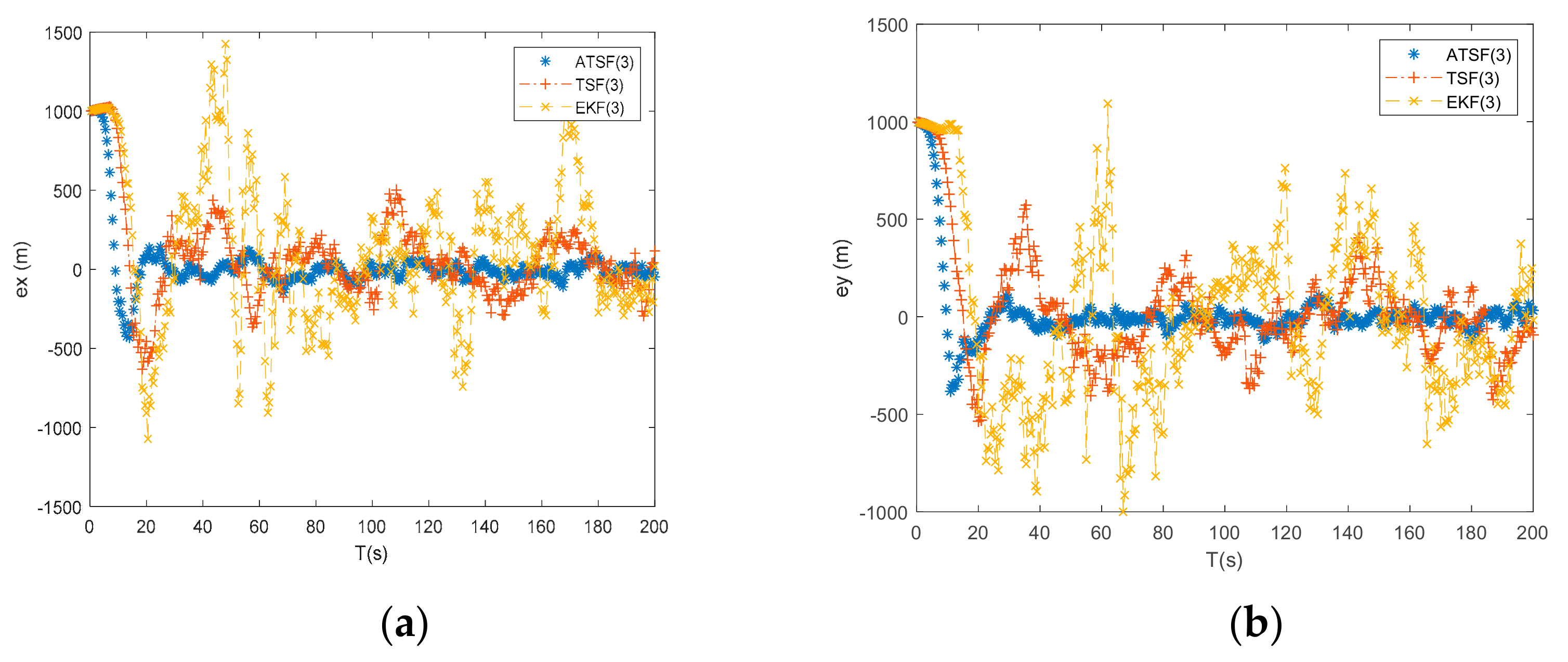
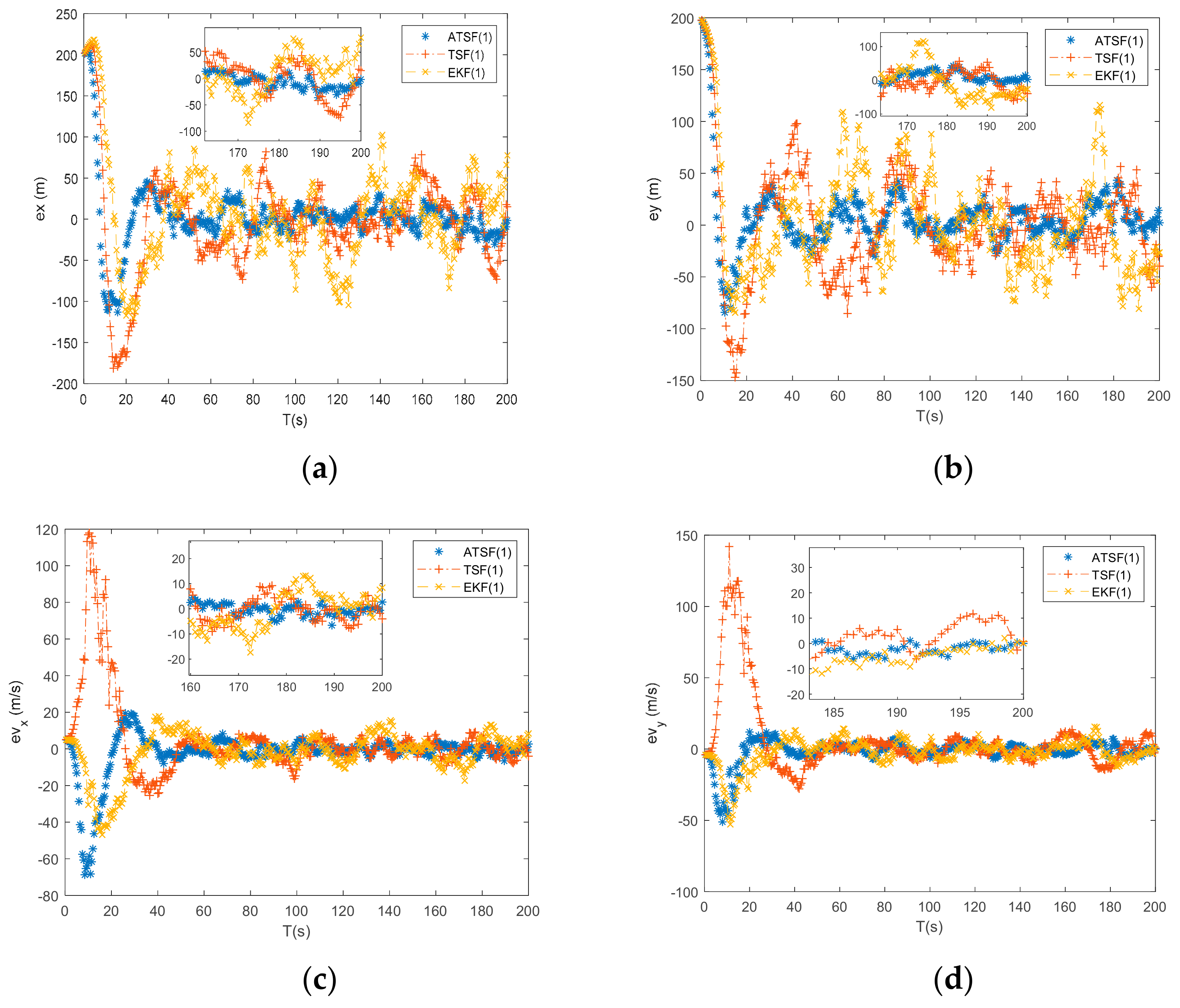
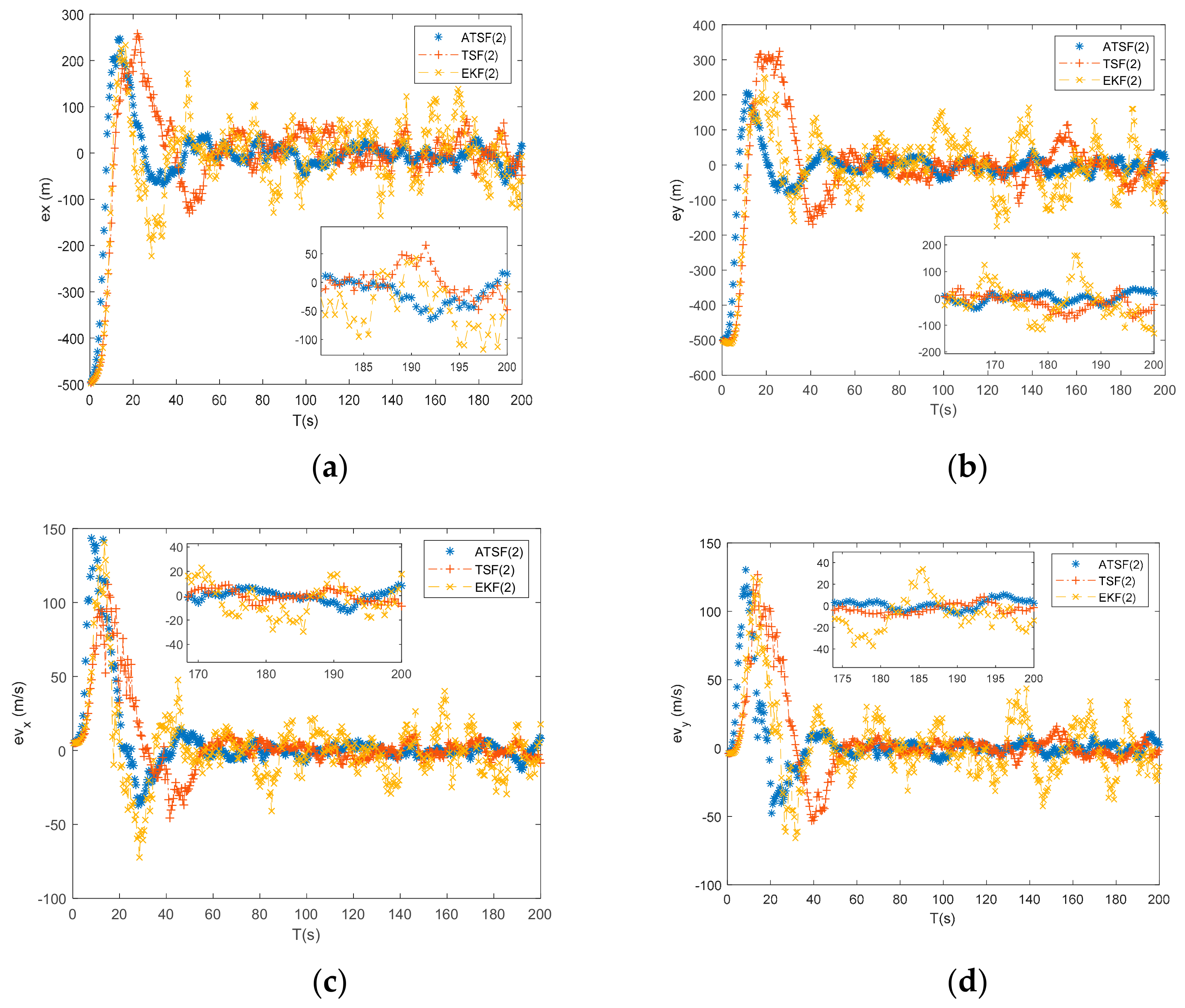
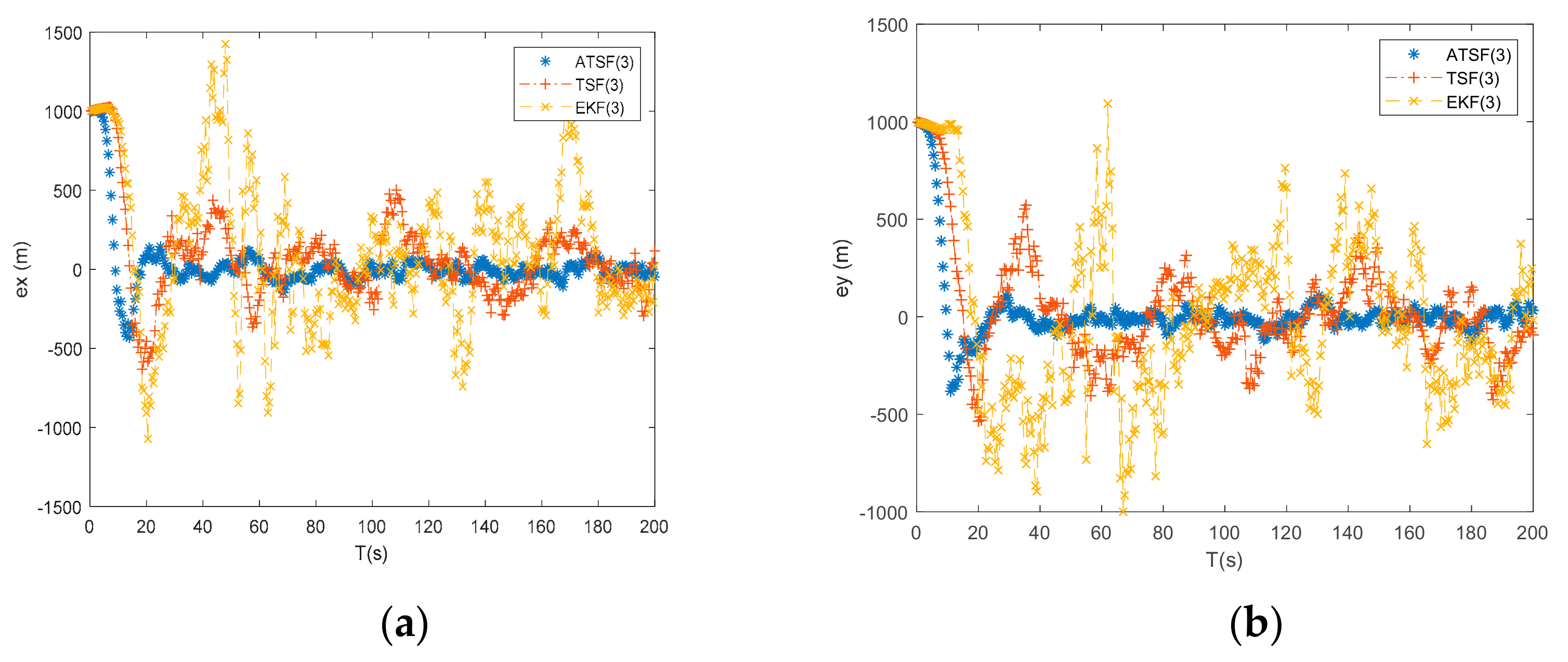
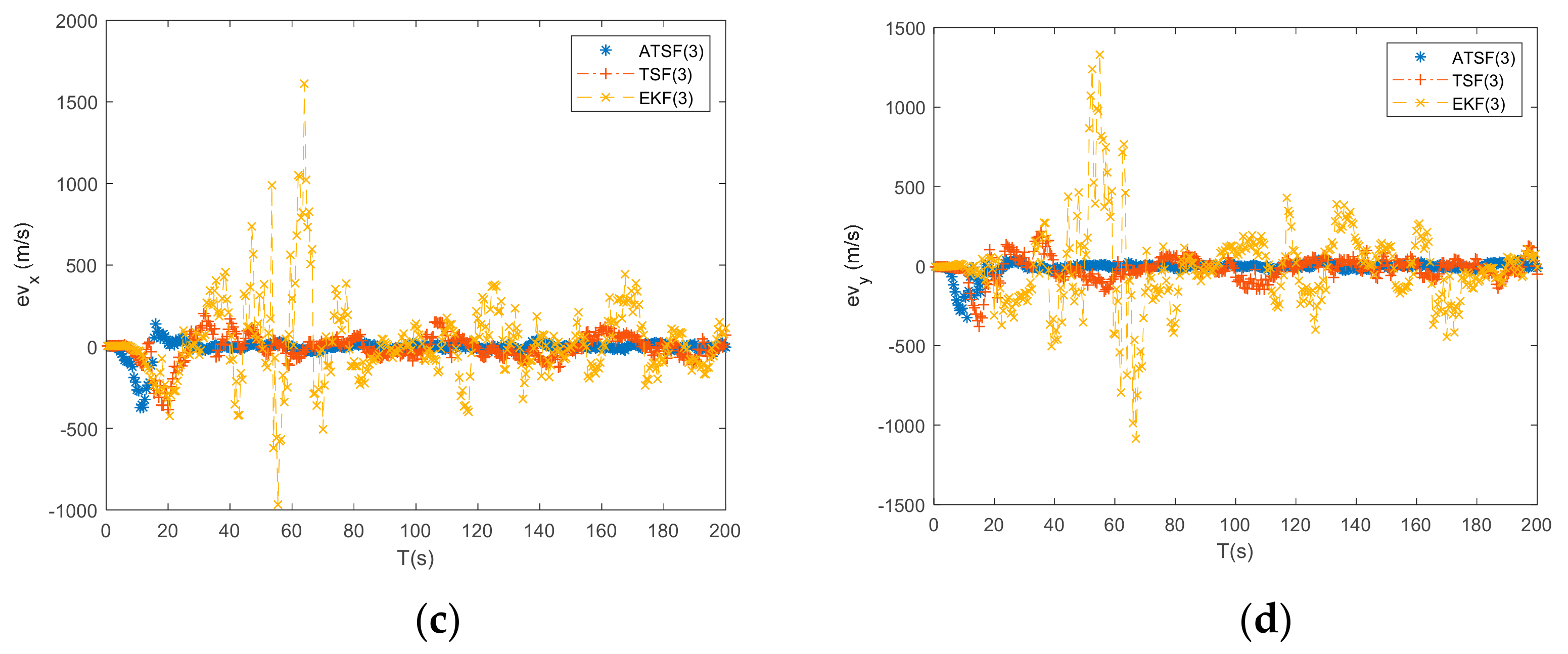
5.2.1. Accuracy Analysis under Different Initial Errors
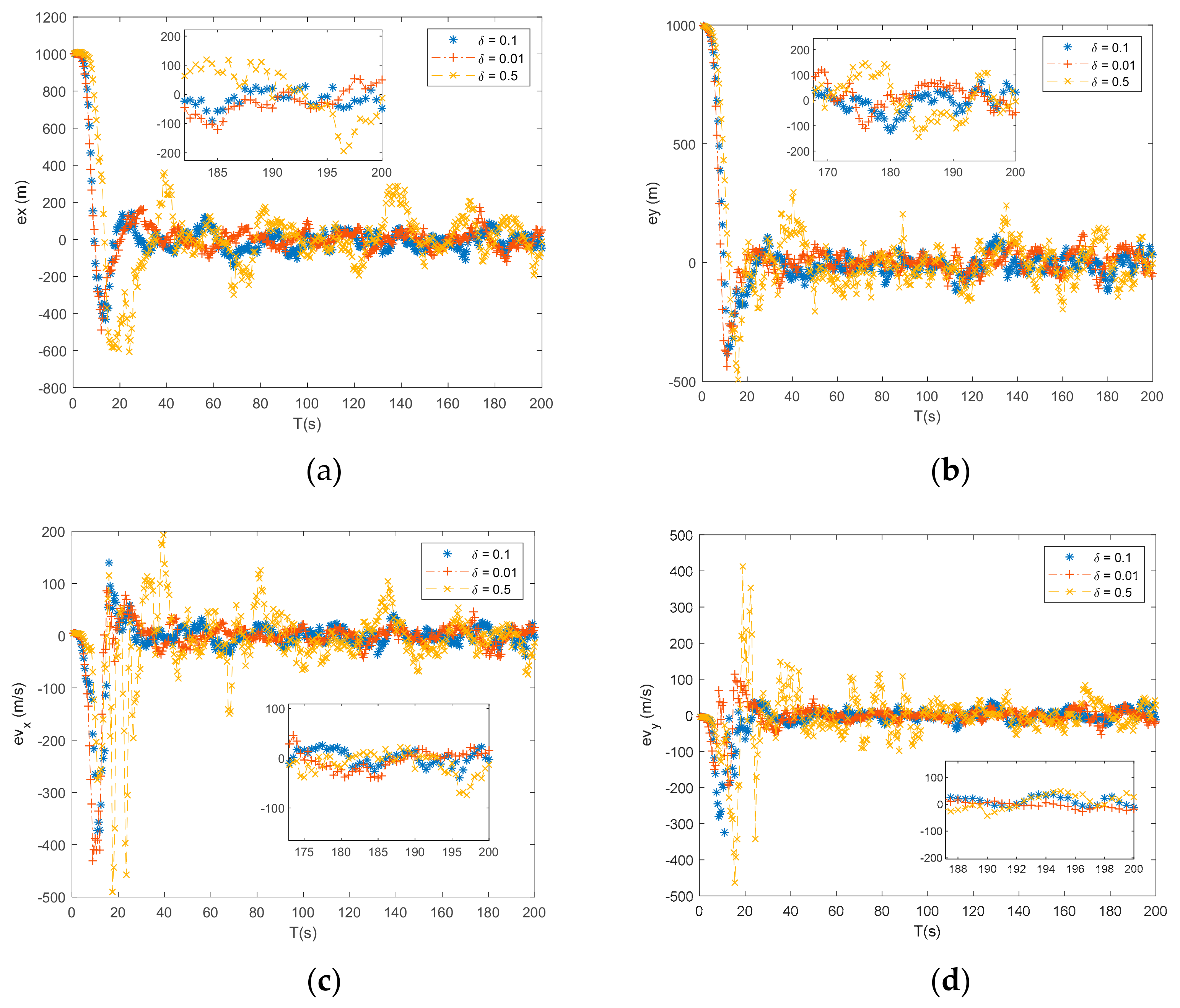
5.2.2. Computational Time Analysis under Different Thresholds during Regularized Newton-Gauss Iteration
6. Discussion
- The proposed ATSF, the traditional two-step filter, and the EKF can obtain good tracking results when the initial errors are small. This phenomenon occurs because the linearization error is limited by small errors between the initial values of the target and the initial guesses of the tracking algorithms. However, when the initial errors become large, the tracking performances are different. The superior tracking performance of the two-step filtering scheme for both the ATSF and the traditional two-step filter shows their effectiveness.
- As the ATSF is more robust and accurate due to the online noise estimation function and the regularization operation in the two-step filtering process, the ATSF can achieve more accurate tracking results when the online noise varies. In addition, the tracking performance of the ATSF is more stable than that of the traditional two-step filter because the regularization operations prevent the core matrixes from becoming ill-conditioned during the filtering procedure. On the contrary, when the noise is uncertain, the tracking procedure of the traditional two-step filter fluctuates and the tracking results have larger errors when compared to the ATSF.
- Regarding the computational time, the computational loads for the proposed ATSF and the traditional two-step filter rely significantly on the second-step Newton-Gauss iterating operation. A smaller difference between the state at the th and th iteration steps results in an increase in computational time. Therefore, setting a rational iteration threshold is important to control the computational load of the two-step filtering techniques. In real applications, this threshold can be predetermined for a specific tracking system by empirical simulations.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jin, X.B.; Jeremiah, R.R.; Su, T.-L.; Bai, Y.; Kong, J.-L. The New Trend of State Estimation: From Model-Driven to Hybrid-Driven Methods. Sensors 2021, 21, 2085. [Google Scholar] [CrossRef] [PubMed]
- Afshari, H.H.; Gadsden, S.A.; Habibi, S. Gaussian filters for parameter and state estimation: A general review of theory and recent trends. Signal Process. 2017, 135, 218–238. [Google Scholar] [CrossRef]
- Mellema, G.R. Improved Active Sonar Tracking in Clutter Using Integrated Feature Data. IEEE J. Ocean. Eng. 2020, 45, 304–318. [Google Scholar] [CrossRef]
- Edelson, G.S. Two-stage active sonar network track-before-detect processing in a high clutter harbor environment. J. Acoust. Soc. Am. 2016, 140, 3349. [Google Scholar] [CrossRef]
- Silva, F.O.; Bozzi, F.; Monteiro, F.d.; Filho, W.S.; Soares, C.F. Automatic detection and tracking of contacts based in clusterization applied in passive sonar. J. Acoust. Soc. Am. 2019, 146, 3017. [Google Scholar] [CrossRef]
- Northardt, T. A Cramér-Rao Lower Bound Derivation for Passive Sonar Track-Before-Detect Algorithms. IEEE Trans. Inf. Theory 2020, 66, 6449–6457. [Google Scholar] [CrossRef]
- Yi, W.; Fu, L.; García-Fernández, A.F.; Xu, L.; Kong, L. Particle Filtering Based Track-before-detect Method for Passive Array Sonar Systems. Signal Process. 2019, 165, 303–314. [Google Scholar] [CrossRef]
- Miller, A.B.; Miller, B.M. Underwater Target Tracking Using Bearing-Only Measurements. J. Commun. Technol. Electron. 2018, 63, 643–649. [Google Scholar] [CrossRef]
- Li, X.; Zhao, C.; Yu, J.; Wei, W. Underwater Bearing-only and Bearing-Doppler Target Tracking Based on Square Root Unscented Kalman Filter. Entropy 2019, 21, 740. [Google Scholar] [CrossRef] [Green Version]
- Han, X.; Liu, M.; Zhang, S.; Zhang, Q. A Multi-node Cooperative Bearing-only Target Passive Tracking Algorithm via UWSNs. IEEE Sens. J. 2019, 19, 10609–10623. [Google Scholar] [CrossRef]
- Li, L.; Krolik, J.L. Target tracking in uncertain Multipath Environment using distributed Angle-of-Arrival observation. In Proceedings of the IEEE Radar Conference (RadarCon), Arlington, VA, USA, 10–15 May 2015; pp. 1473–1478. [Google Scholar]
- Radhakrishnan, R.; Bhaumik, S.; Tomar, N.K. Continuous-discrete filters for bearings-only underwater target tracking problems. Asian J. Control 2019. [Google Scholar] [CrossRef]
- Tsinias, J.; Kitsos, C. Observability and State Estimation for a Class of Nonlinear Systems. IEEE Trans. Autom. Control. 2018, 64, 2621–2628. [Google Scholar] [CrossRef] [Green Version]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation; Wiley-Interscience: Hoboken, NJ, USA, 2008. [Google Scholar]
- Song, L.T. Observability of target tracking with bearings-only measurements. IEEE Trans. Aerosp. Electron. Syst. 1996, 32. [Google Scholar] [CrossRef]
- Modalavalasa, N.; Rao, G.; Prasad, K.S.; Ganesh, L.; Kumar, M.N.V.S.S. A new method of target tracking by EKF using bearing and elevation measurements for underwater environment. Robot. Auton. Syst. 2015, 74, 221–228. [Google Scholar] [CrossRef]
- Maity, A.; Padhi, R. Robust control design of an air-breathing engine for a supersonic vehicle using backstepping and UKF. Asian J. Control. 2017. [Google Scholar] [CrossRef]
- Leong, P.H.; Arulampalam, S.; Lamahewa, T.A.; Abhayapala, T.D. A Gaussian-Sum Based Cubature Kalman Filter for Bearings-Only Tracking. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1161–1176. [Google Scholar] [CrossRef]
- Bordonaro, S.V.; Willett, P.; Bar-Shalom, Y.; Luginbuhl, T. Converted Measurement Sigma Point Kalman Filter for Bistatic Sonar and Radar Tracking. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 147–159. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, L. Sensor-Networked Underwater Target Tracking Based on Grubbs Criterion and Improved Particle Filter Algorithm. IEEE Access 2019, 7, 142894–142906. [Google Scholar] [CrossRef]
- Haupt, G.T.; Kasdin, N.J.; Keiser, G.M.; Parkinson, B.W. Optimal recursive iterative algorithm for discrete nonlinear least-squares estimation. J. Guid. Control. Dyn. 1996, 19, 643–649. [Google Scholar] [CrossRef]
- Kasdin, N.J.; Haupt, G.T. Second-Order Correction and Numerical Considerations for the Two-Step Optimal Estimator. J. Guid. Control. Dyn. 2012, 20, 362–369. [Google Scholar] [CrossRef]
- Garrison, J.L.; Axelrad, P.; Kasdin, N.J. Ill-Conditioned Covariance Matrices in the First-Order Two-Step Estimator. J. Guid. Control. Dyn. 1998, 21, 754–760. [Google Scholar] [CrossRef]
- Kasdin, J.N. New, Guaranteed Positive Time Update for the Two-Step Optimal Estimator. J. Guid. Control. Dyn. 2015, 23, 215–221. [Google Scholar] [CrossRef]
- Zhou, D.; Mu, C.; Xu, W. Adaptive Two-Step Filter with Applications to Bearings-Only Measurement Problem. J. Guid. Control. Dyn. 2015, 22, 726–728. [Google Scholar] [CrossRef]
- Gurfil, P.; Kasdin, N.J. Two-step optimal estimator for three dimensional target tracking. Aerosp. Electron. Syst. IEEE Trans. 2005, 41, 780–793. [Google Scholar] [CrossRef]
- Hou, X.; Yuan, J. Novel dual vector quaternions based adaptive extended two-step filter for pose and inertial parameters estimation of a free-floating tumbling space target. Proc. Inst. Mech. Eng. 2019, 233, 2570–2591. [Google Scholar] [CrossRef]
- Bryson, A.E.; Ho, Y. Applied Optimal Control: Optimization, Estimation, and Control; Routledge: Boca Raton, FL, USA, 1975. [Google Scholar]
- Jin, X.B.; Chao, D.; Su, T.L.; Lian, X.-f.; Shi, Y. Parallel Irregular Fusion Estimation Based on Nonlinear Filter for Indoor RFID Tracking System. Int. J. Distrib. Sens. Netw. 2016, 12, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Jin, X.B.; Du, J.J.; Bao, J. Target Tracking of a Linear Time Invariant System under Irregular Sampling. Int. J. Adv. Robot. Syst. 2019, 9, 219–230. [Google Scholar]
- Feng, H.; Cai, Z. Target tracking based on improved square root cubature particle filter via underwater wireless sensor networks. Communications 2019, 13, 1008–1015. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Observer Number | Coordinate |
|---|---|
| 1 | |
| 2 |
| Number | Initial Guesses |
|---|---|
| 1 | |
| 2 | |
| 3 |
| Tracking Algorithm | ||
|---|---|---|
| ATSF (1) | 11.72 | 1.83 |
| Traditional two-step filter (1) | 21.88 | 3.53 |
| EKF (1) | 23.97 | 3.56 |
| ATSF (2) | 16.03 | 2.79 |
| Traditional two-step filter (2) | 31.06 | 5.46 |
| EKF (2) | 51.05 | 11.66 |
| ATSF (3) | 33.23 | 10.36 |
| Traditional two-step filter (3) | 116.48 | 46.47 |
| EKF (3) | 277.81 | 125.56 |
| Threshold | Computational Time | Tracking Accuracy |
|---|---|---|
| 18.84 s | (m) = 33.23 | |
| (m/s) = 10.36 | ||
| 212.5 s | (m) = 32.25 | |
| (m/s) = 9.6 | ||
| 3.71 s | (m) = 68.17 | |
| (m/s) = 20.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, X.; Zhou, J.; Yang, Y.; Yang, L.; Qiao, G. Adaptive Two-Step Bearing-Only Underwater Uncooperative Target Tracking with Uncertain Underwater Disturbances. Entropy 2021, 23, 907. https://doi.org/10.3390/e23070907
Hou X, Zhou J, Yang Y, Yang L, Qiao G. Adaptive Two-Step Bearing-Only Underwater Uncooperative Target Tracking with Uncertain Underwater Disturbances. Entropy. 2021; 23(7):907. https://doi.org/10.3390/e23070907
Chicago/Turabian StyleHou, Xianghao, Jianbo Zhou, Yixin Yang, Long Yang, and Gang Qiao. 2021. "Adaptive Two-Step Bearing-Only Underwater Uncooperative Target Tracking with Uncertain Underwater Disturbances" Entropy 23, no. 7: 907. https://doi.org/10.3390/e23070907
APA StyleHou, X., Zhou, J., Yang, Y., Yang, L., & Qiao, G. (2021). Adaptive Two-Step Bearing-Only Underwater Uncooperative Target Tracking with Uncertain Underwater Disturbances. Entropy, 23(7), 907. https://doi.org/10.3390/e23070907