
Porcelain Insulator Crack Location and Surface States Pattern Recognition Based on Hyperspectral Technology


Abstract
:1. Introduction
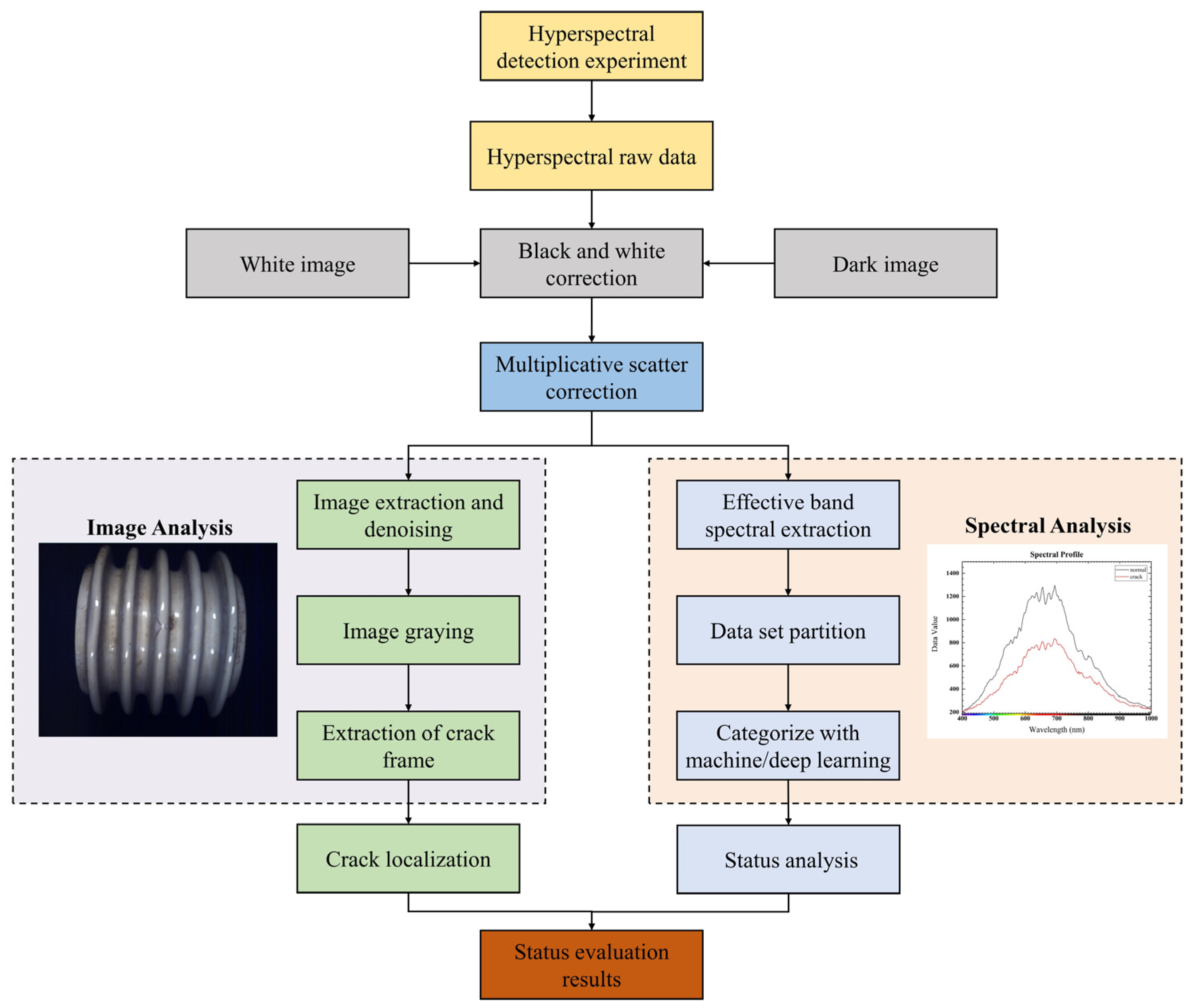
2. Proposed Method
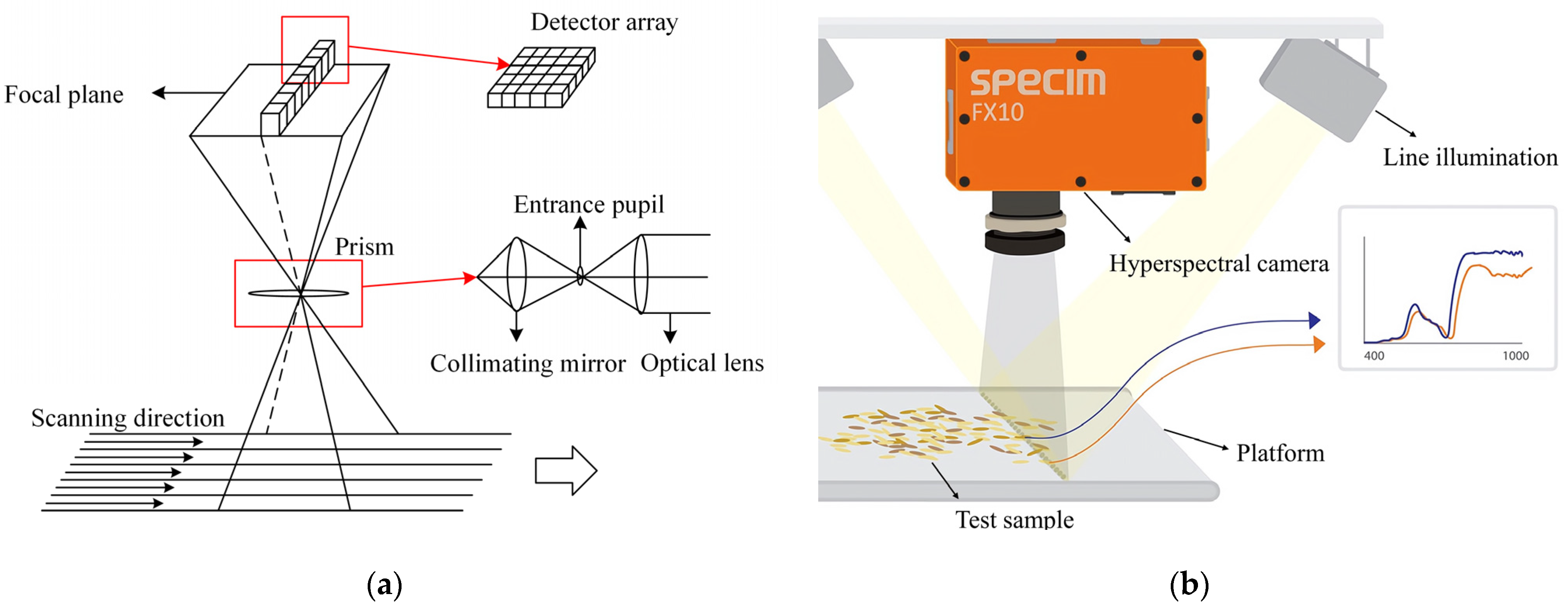
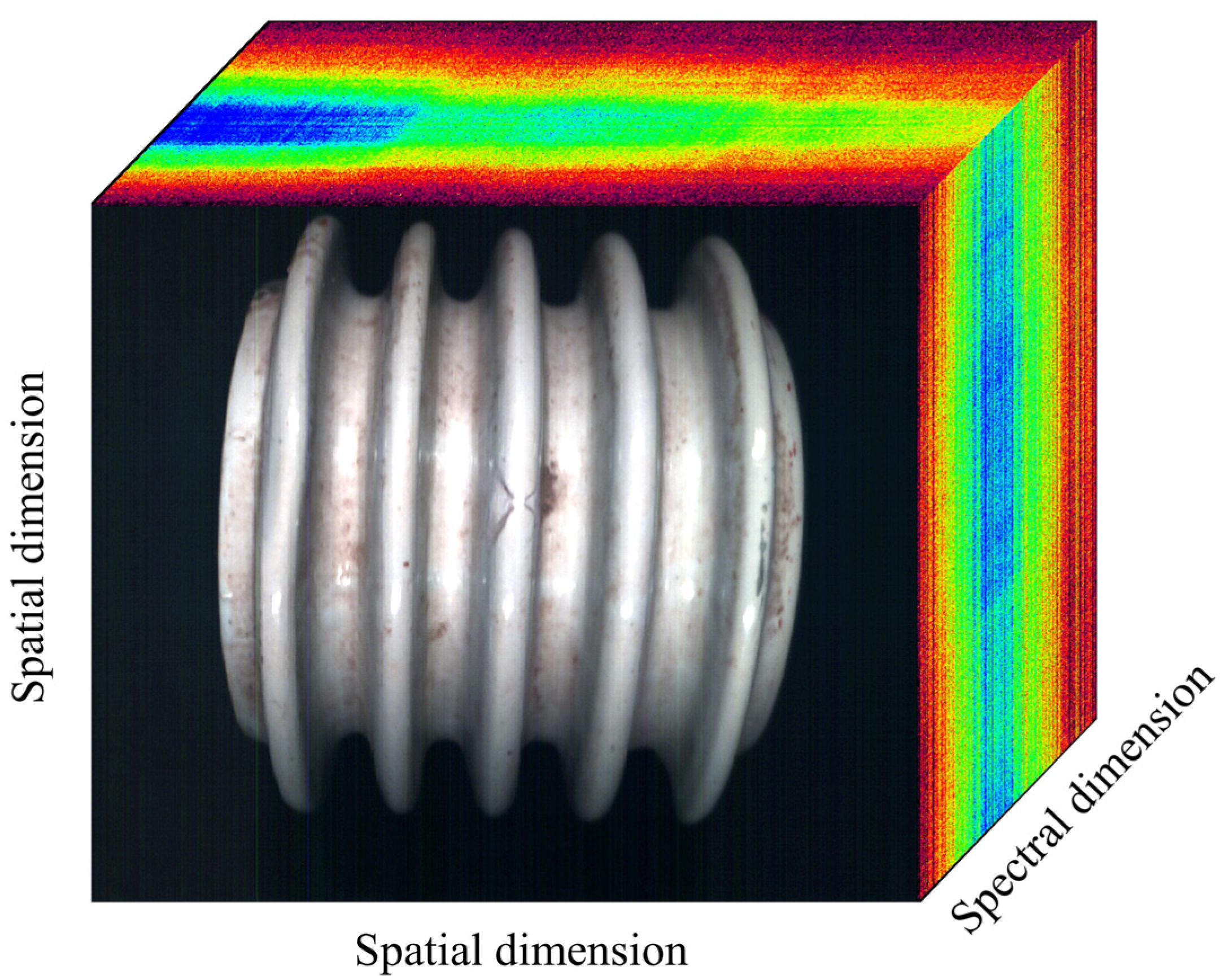
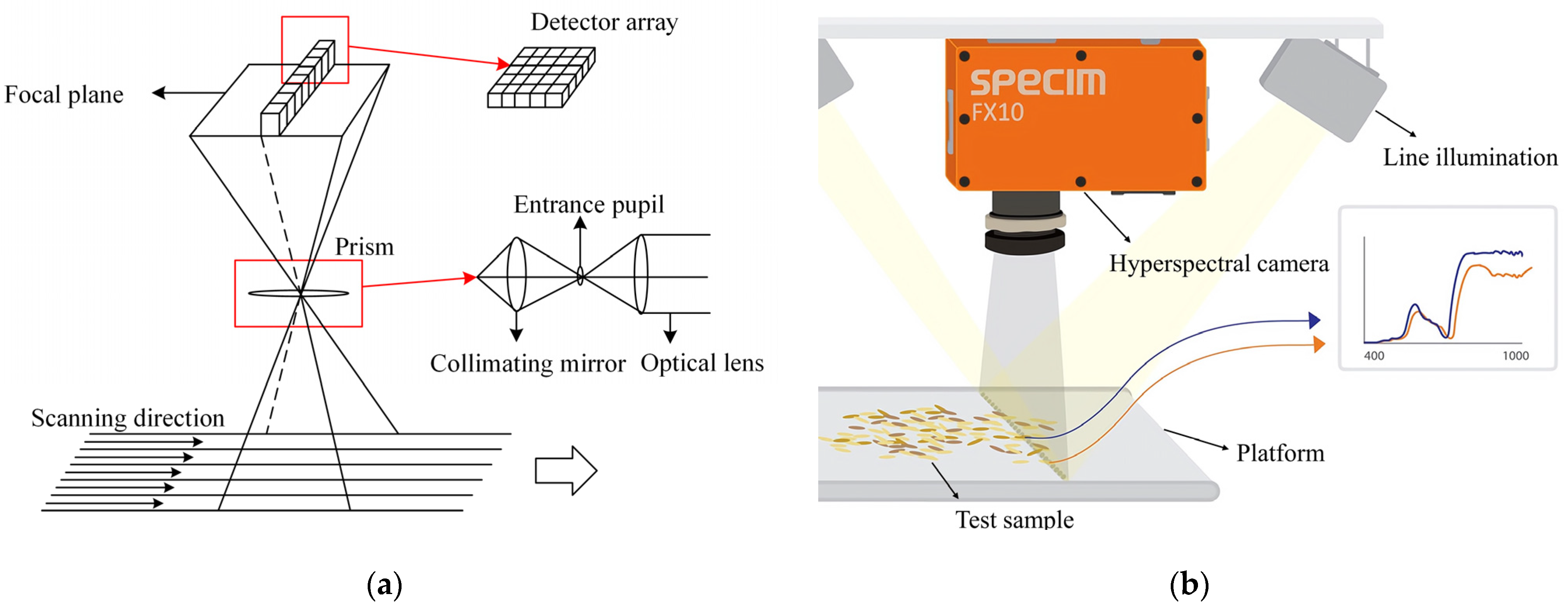
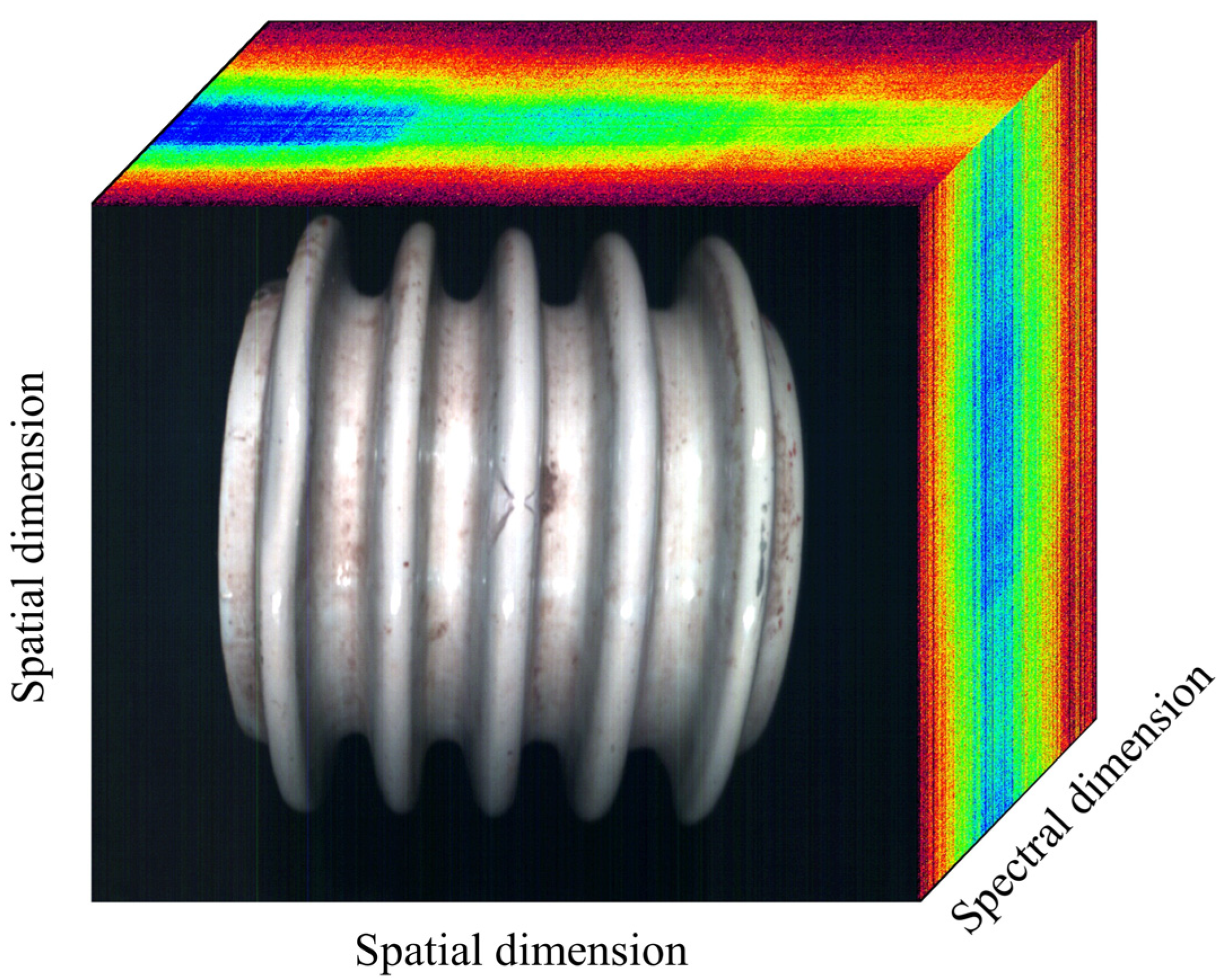
2.1. Fundamental Theory of Hyperspectral Imaging
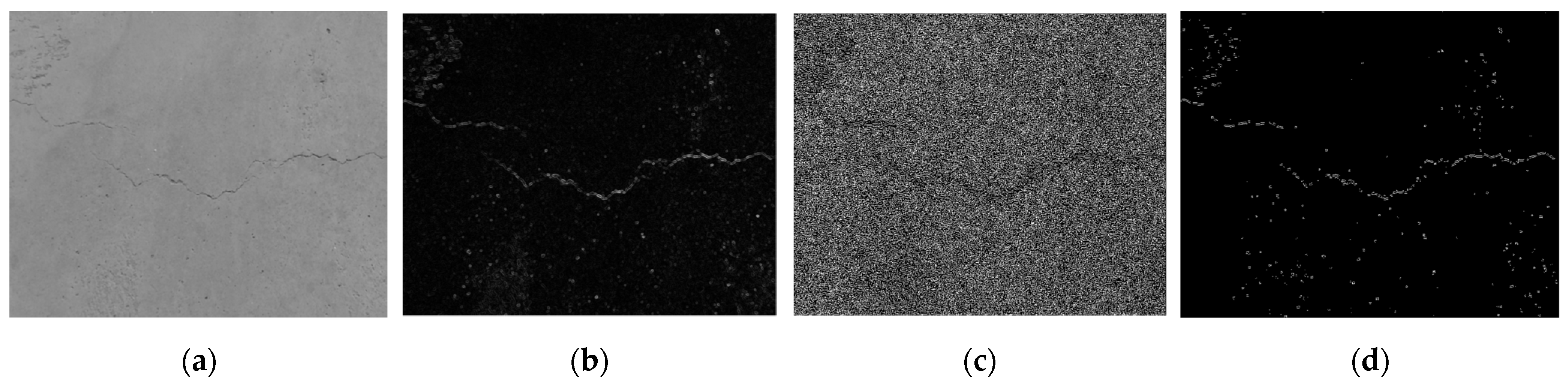
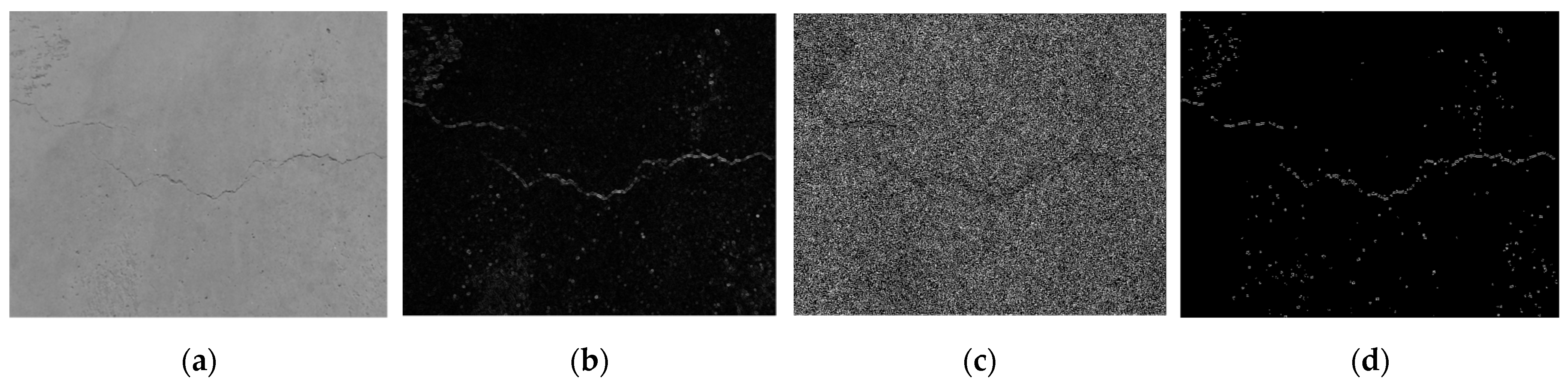
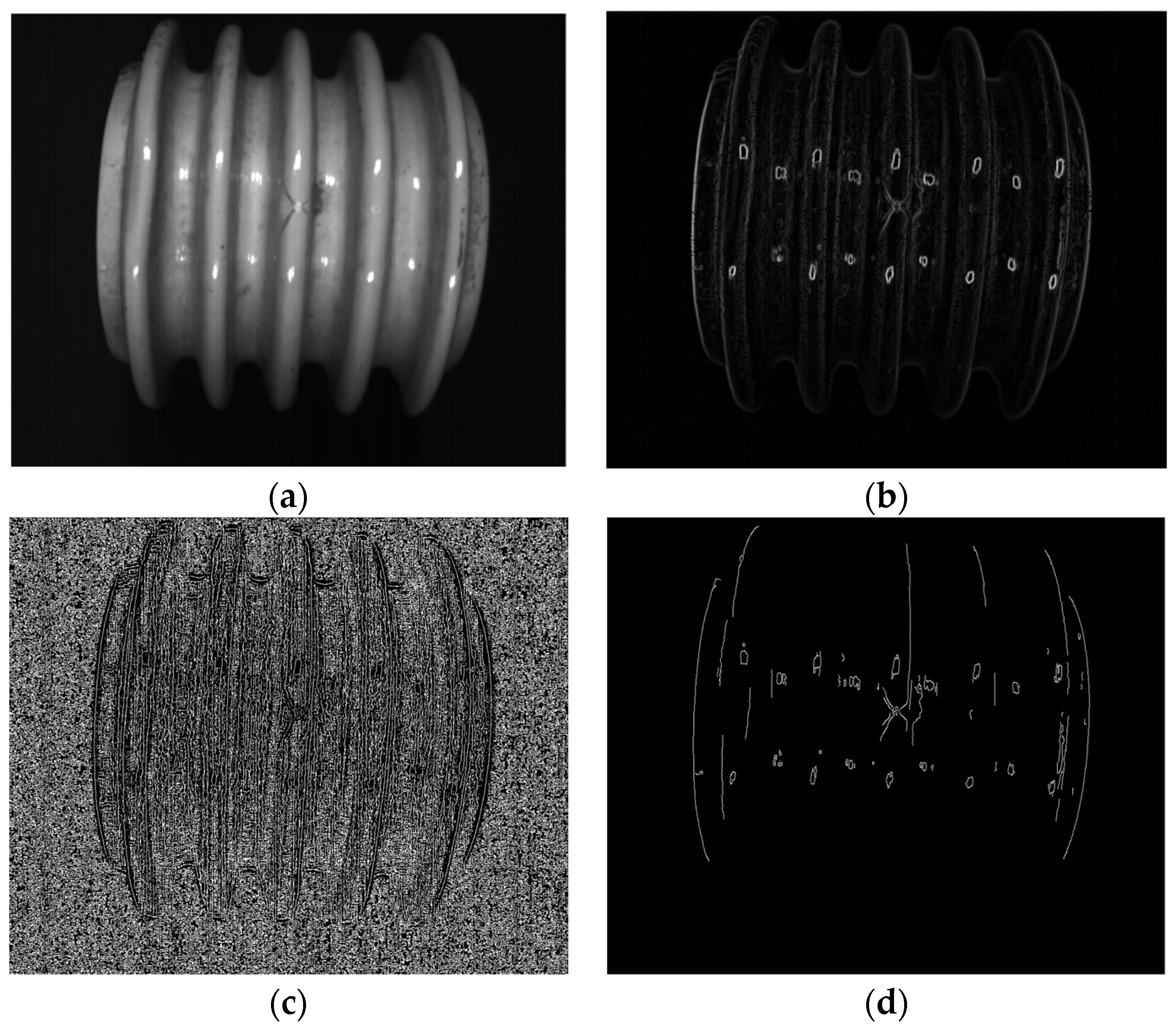
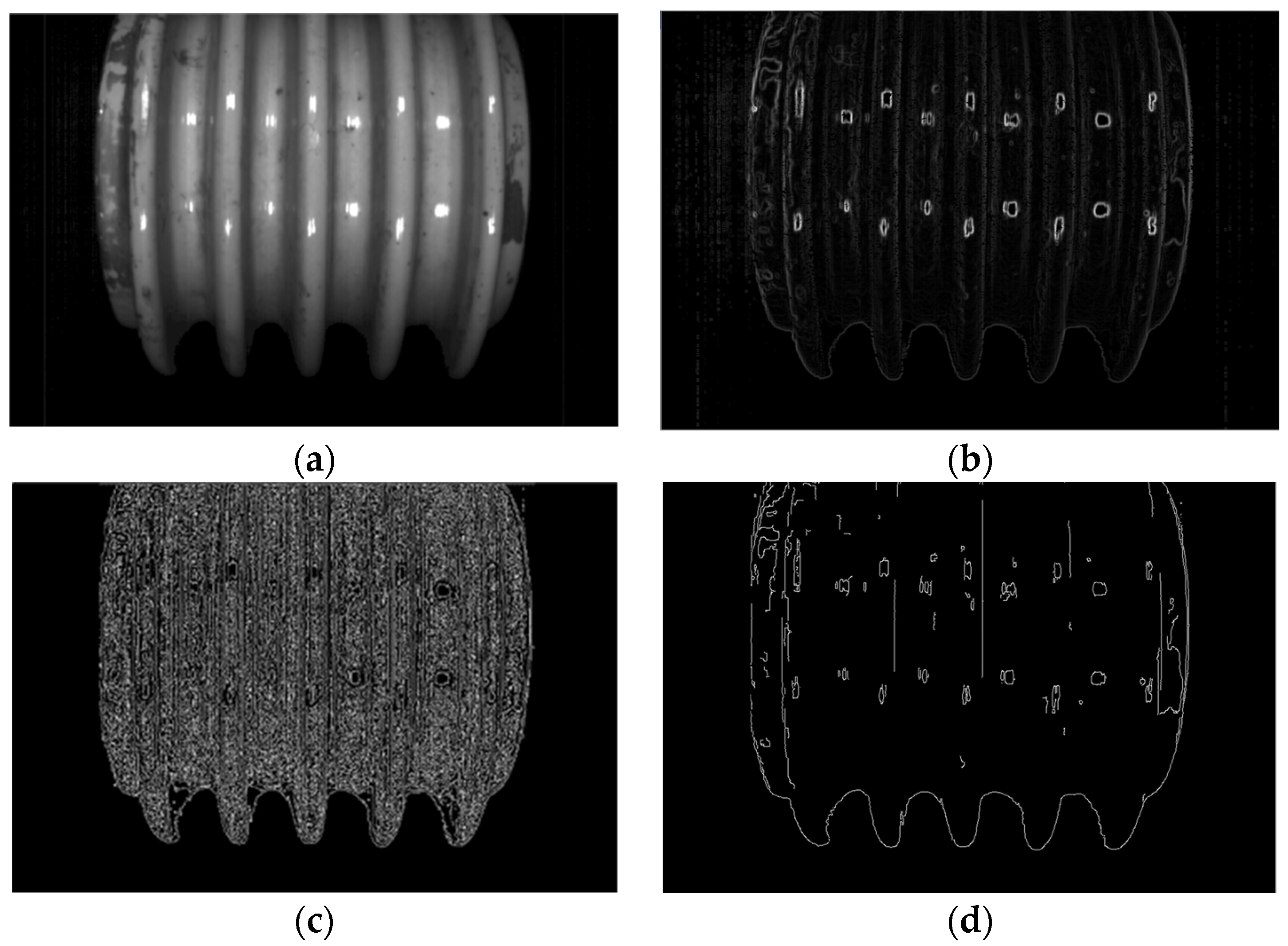
2.2. Crack Localization Based on Computer Image Vision
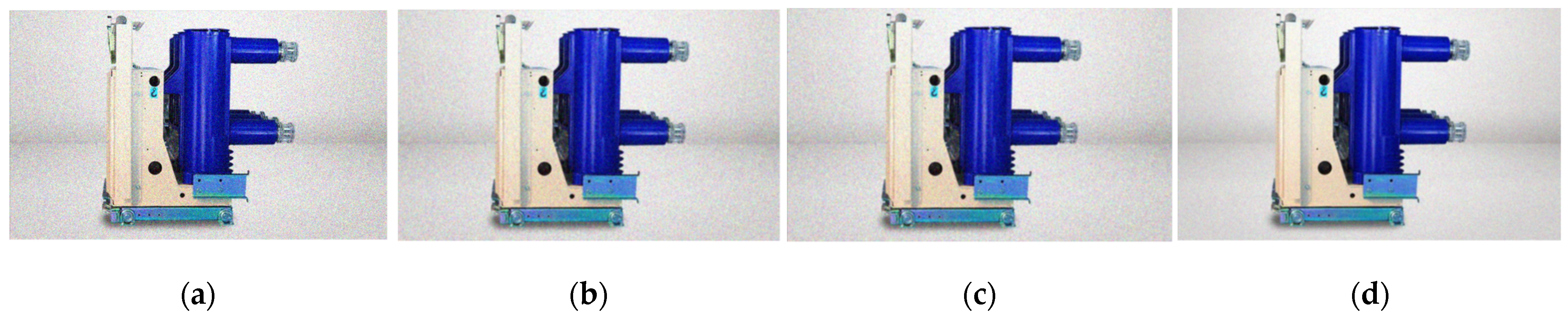
2.2.1. Image Denoising
2.2.2. Grayscale Gradient Calculation
2.2.3. Non-Maximum Suppression (NMS) to Control the Edge Width
2.2.4. Double Threshold Detection and Edge Connection
2.3. Hyperspectral Crack Detection Principle and Classification Method Based on EfficientNet
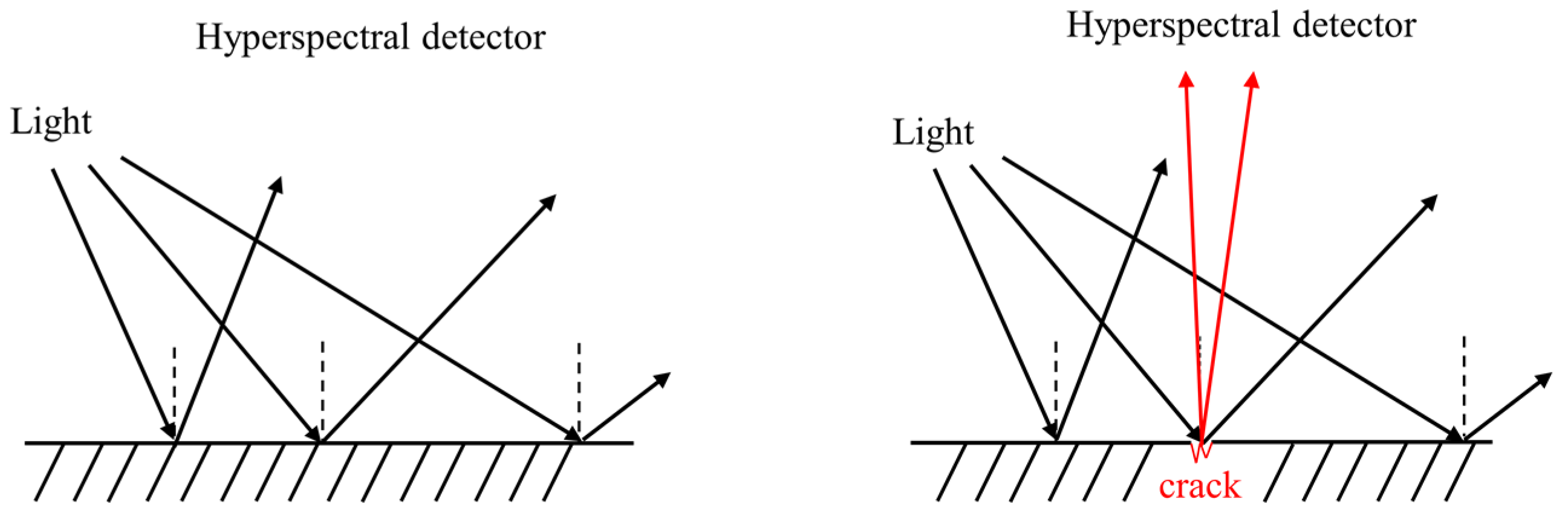
2.3.1. Principle of Crack Detection Based on Spectral Information
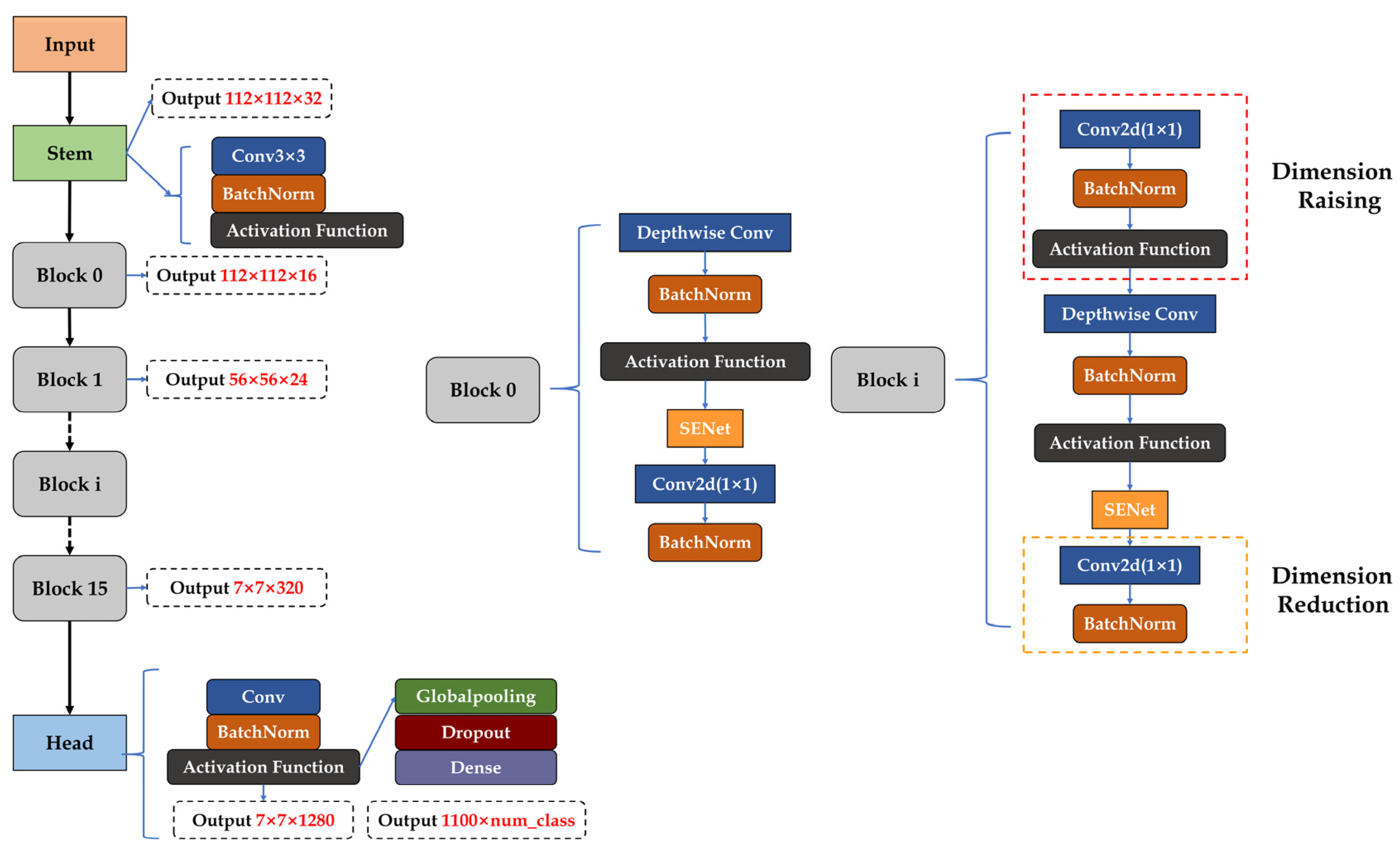
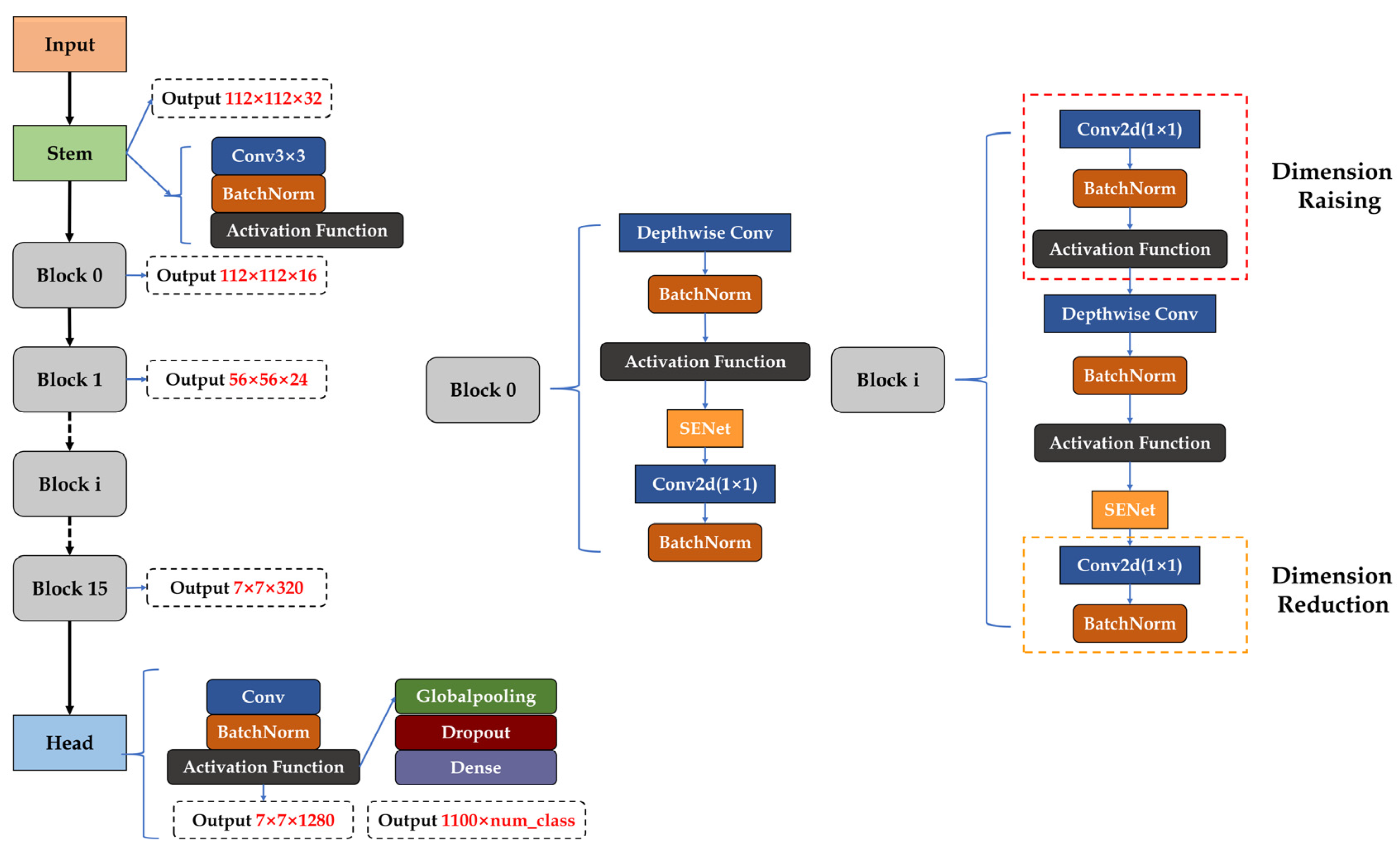
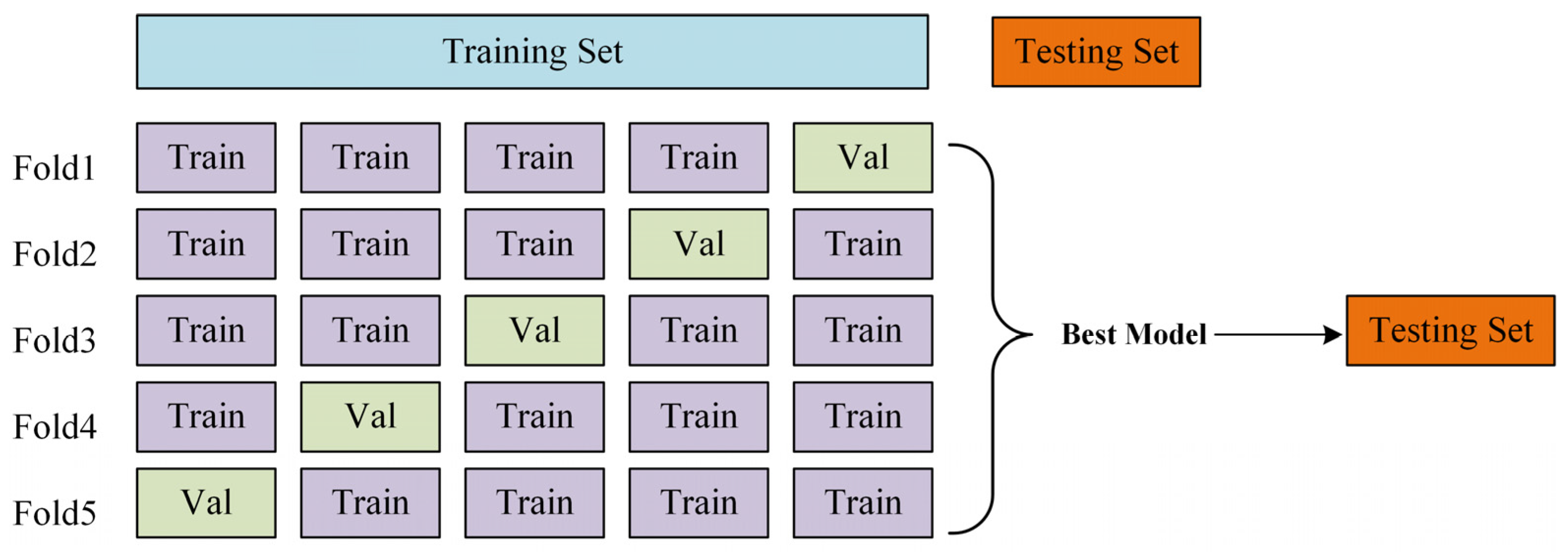
2.3.2. Pattern Recognition of Porcelain Insulator Surface State Based on EfficientNet
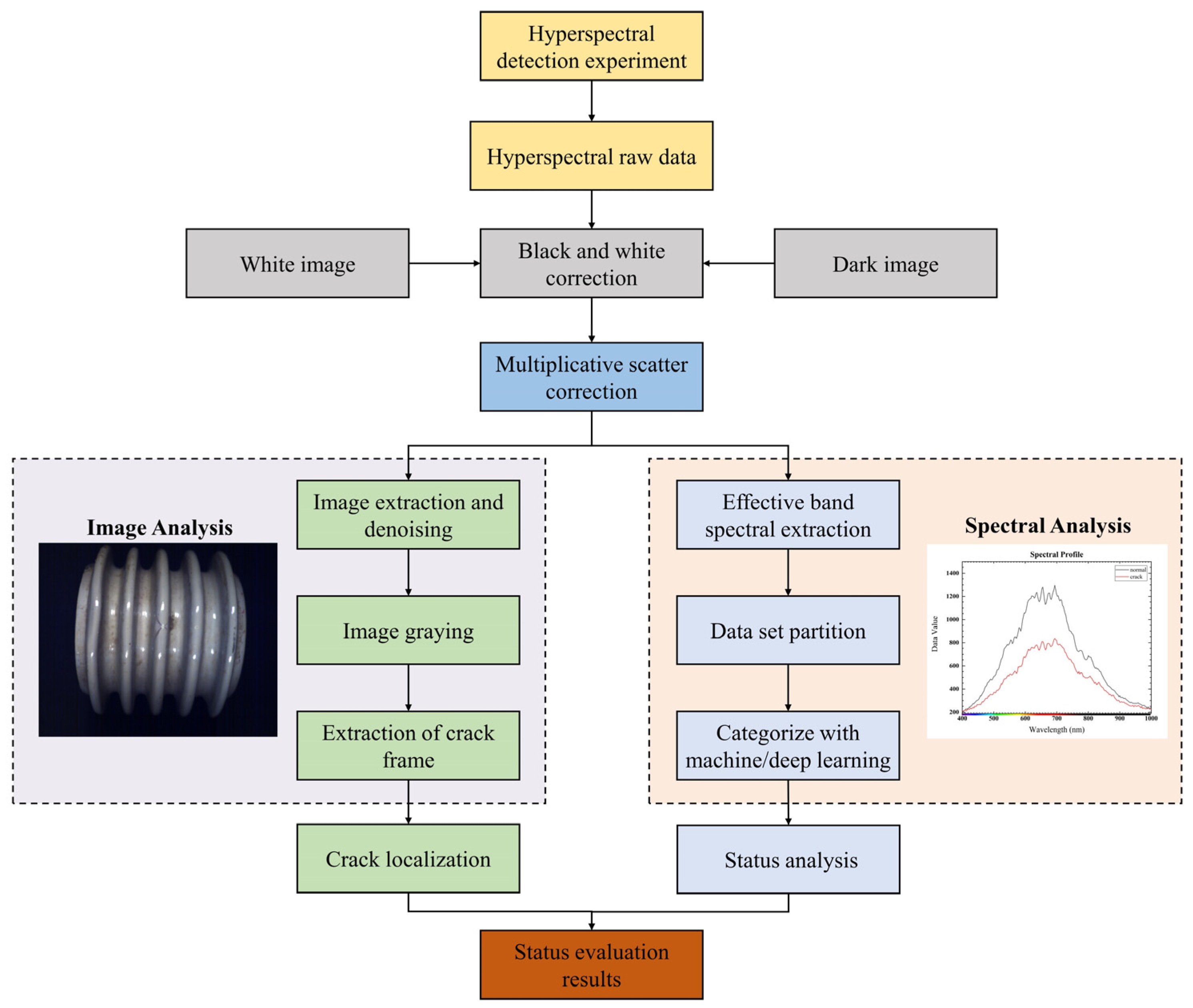
2.4. Crack Positioning and Identification Model of Porcelain Insulators Based on Hyperspectral Data
3. Experiment and Data Processing
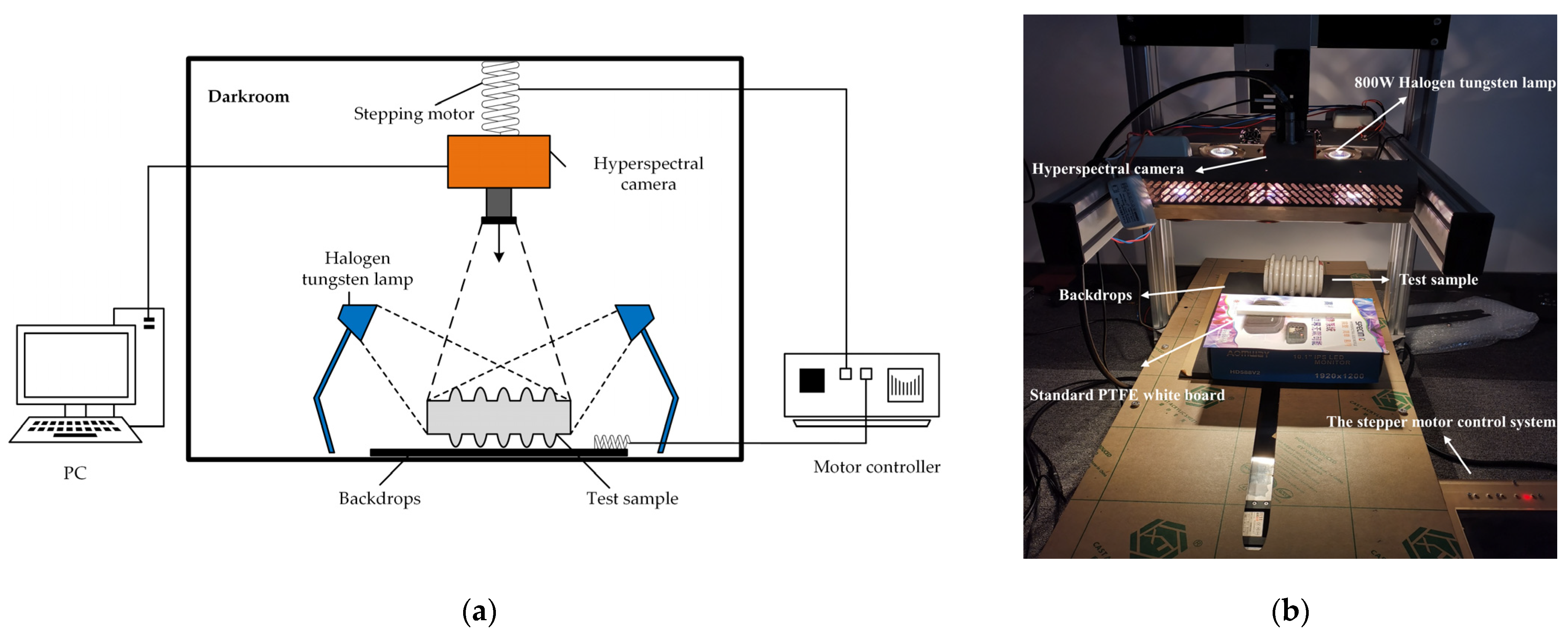
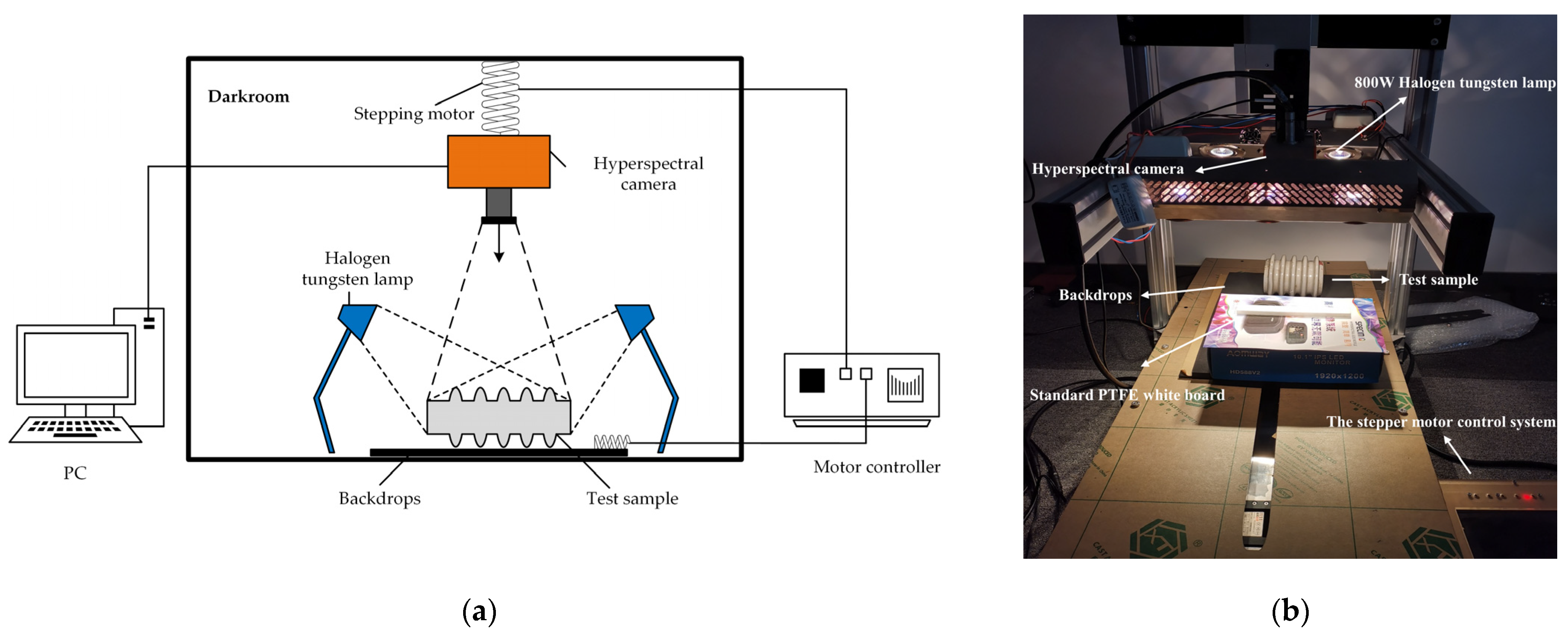
3.1. Hyperspectral Detection Platform and Experimental Process
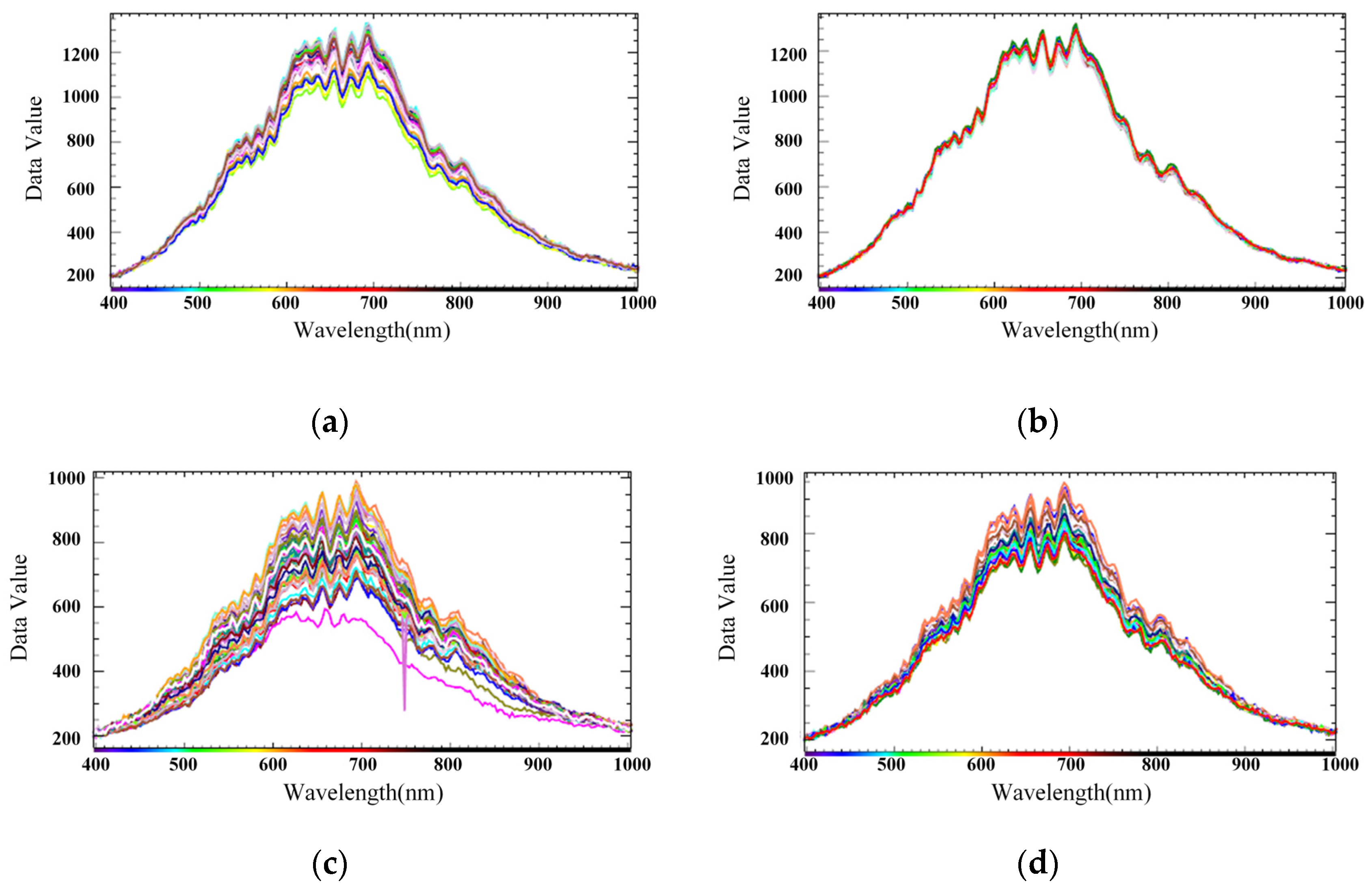
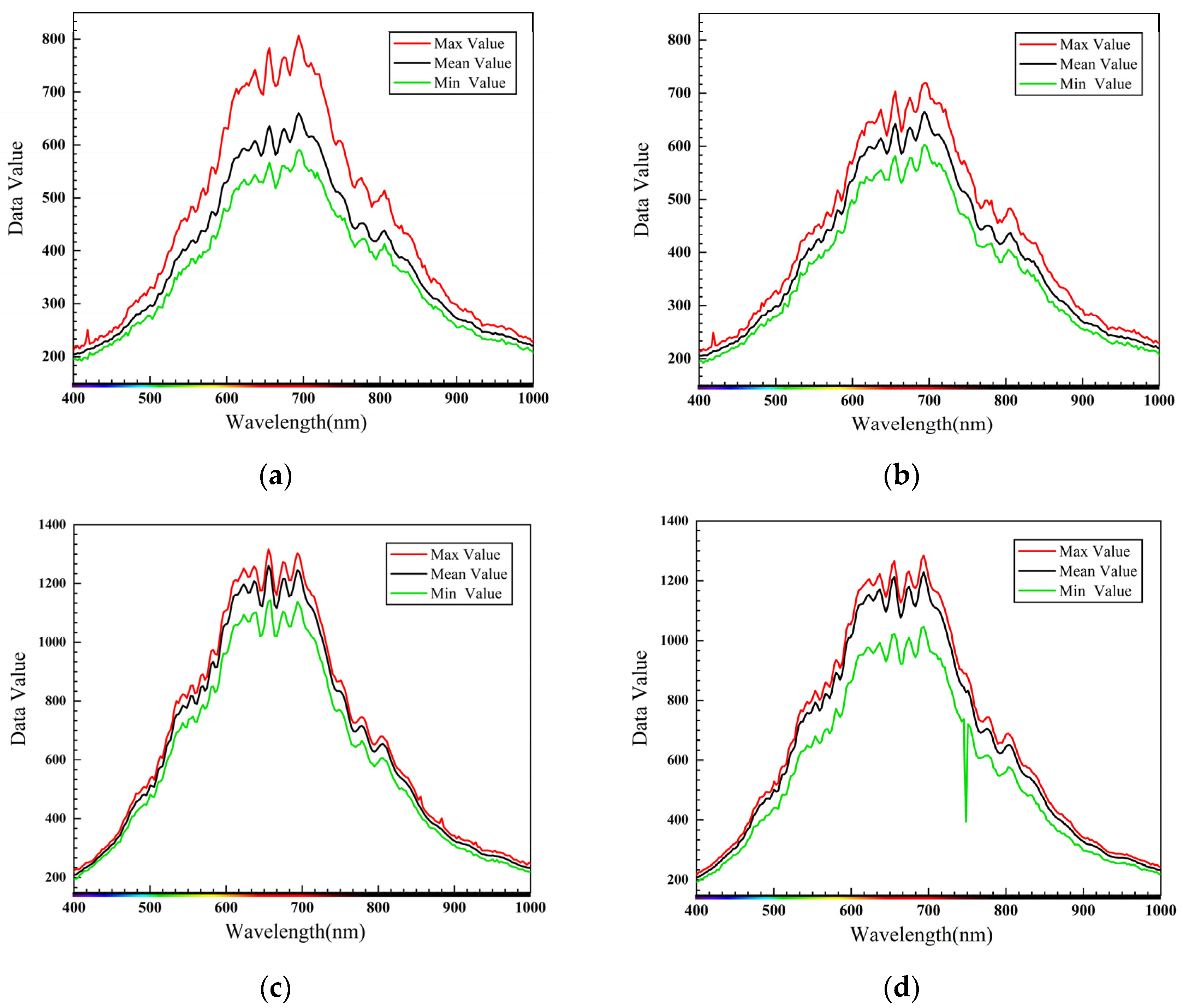
3.2. Hyperspectral Data Processing
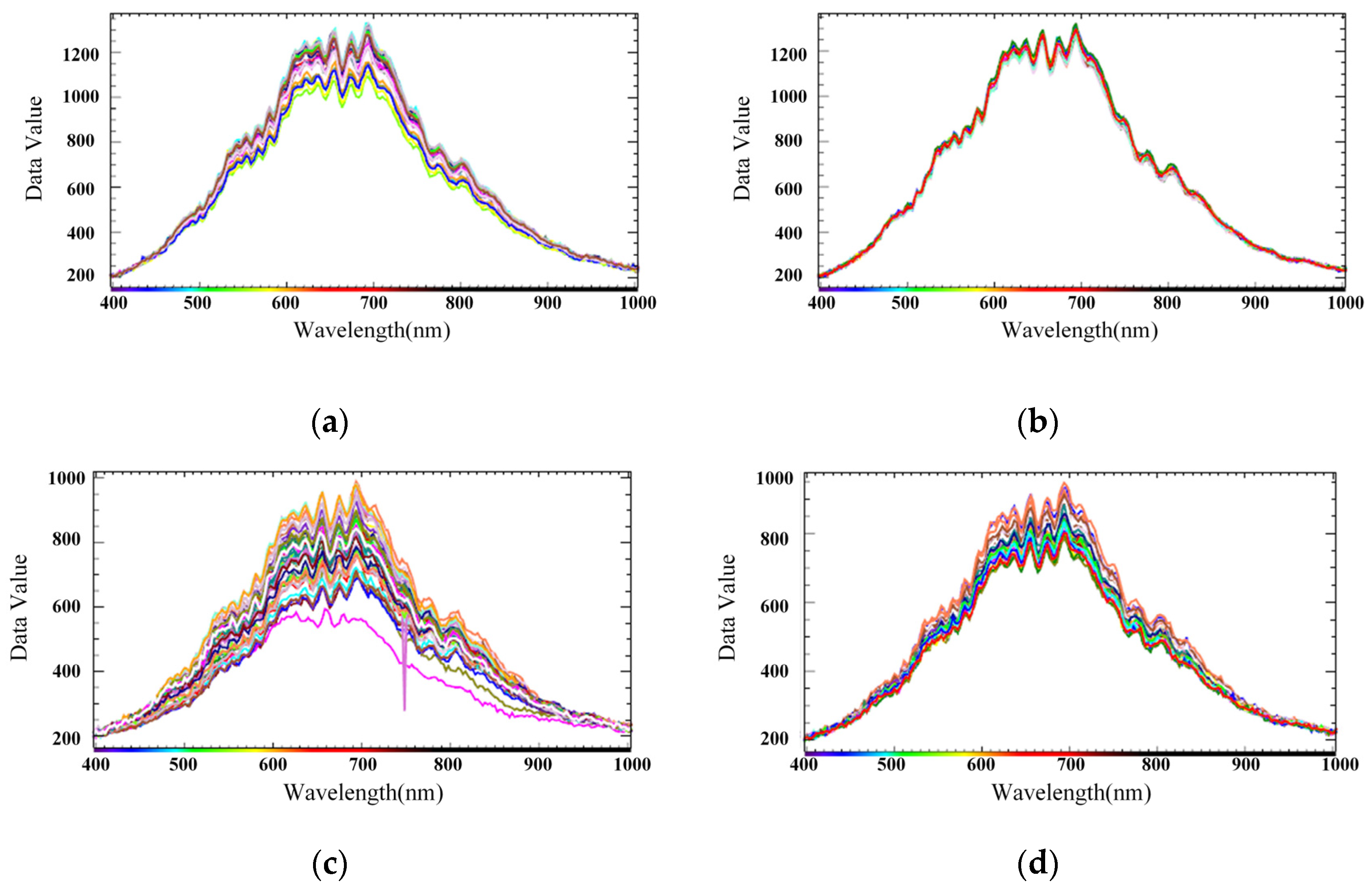
3.2.1. Black-and-White Correction
3.2.2. Multiplicative Scatter Correction
3.3. Wavelength Dimension Reduction Based on End-Member Extraction
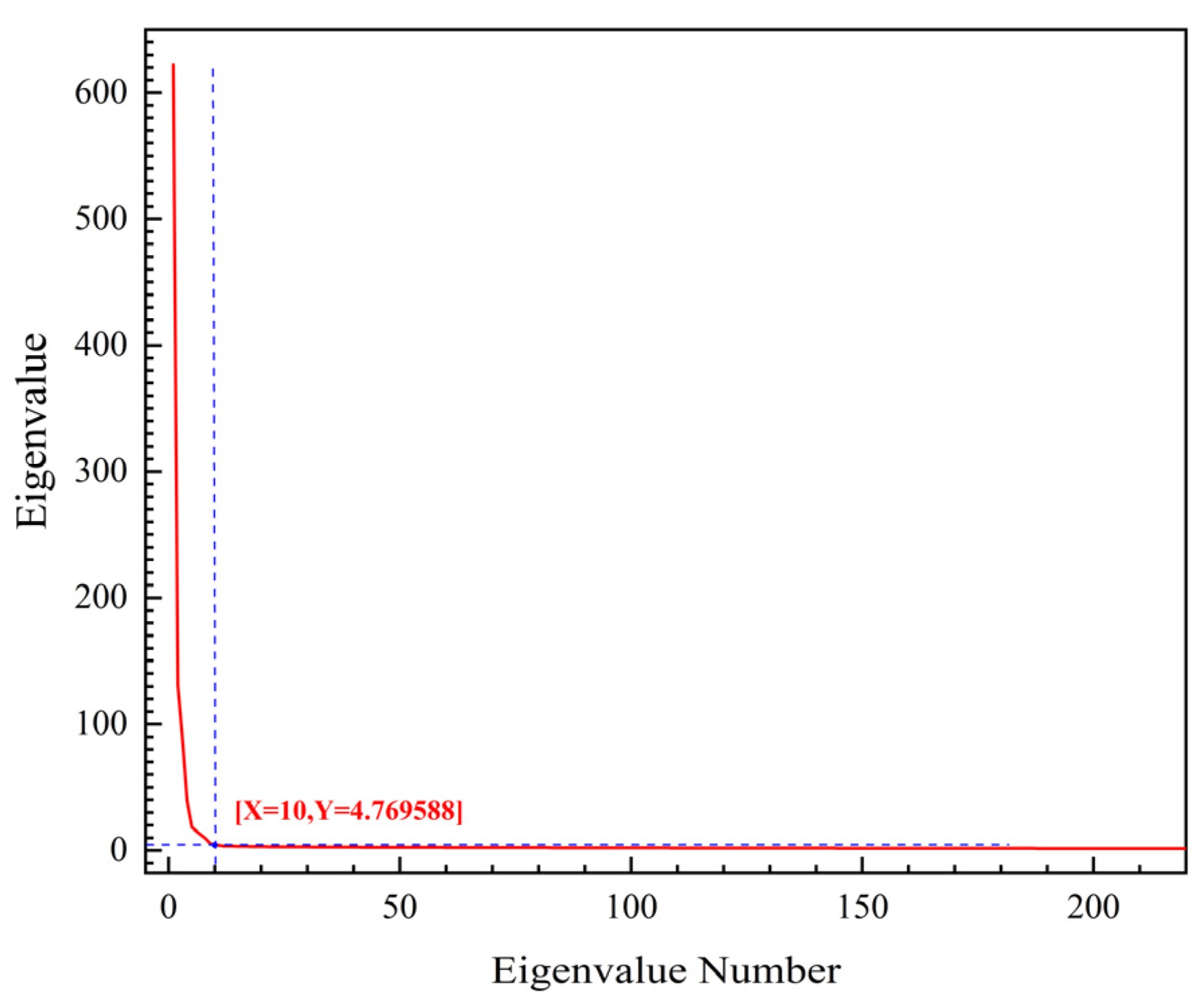
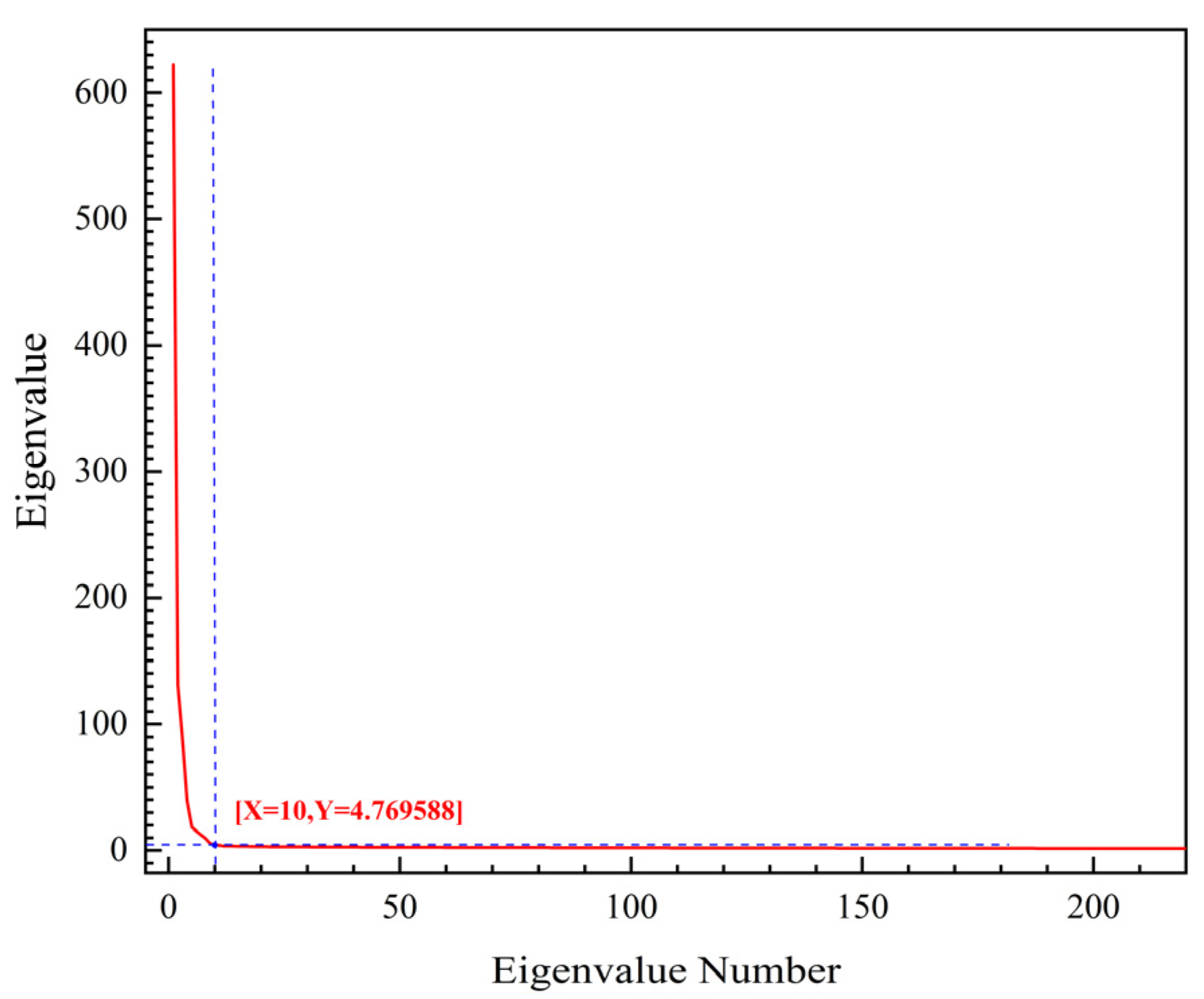
3.3.1. Minimum Noise Fraction (MNF) Transformation
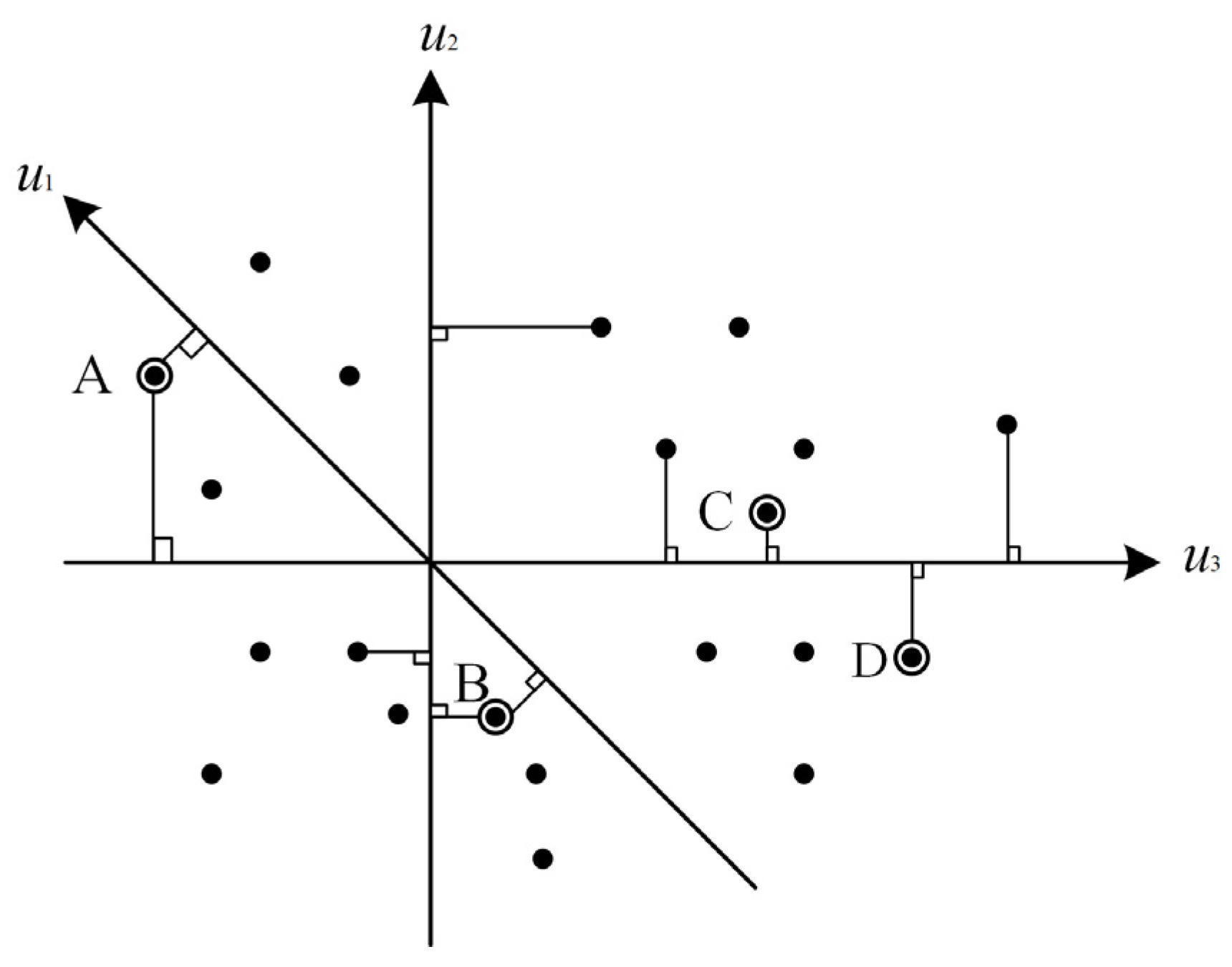
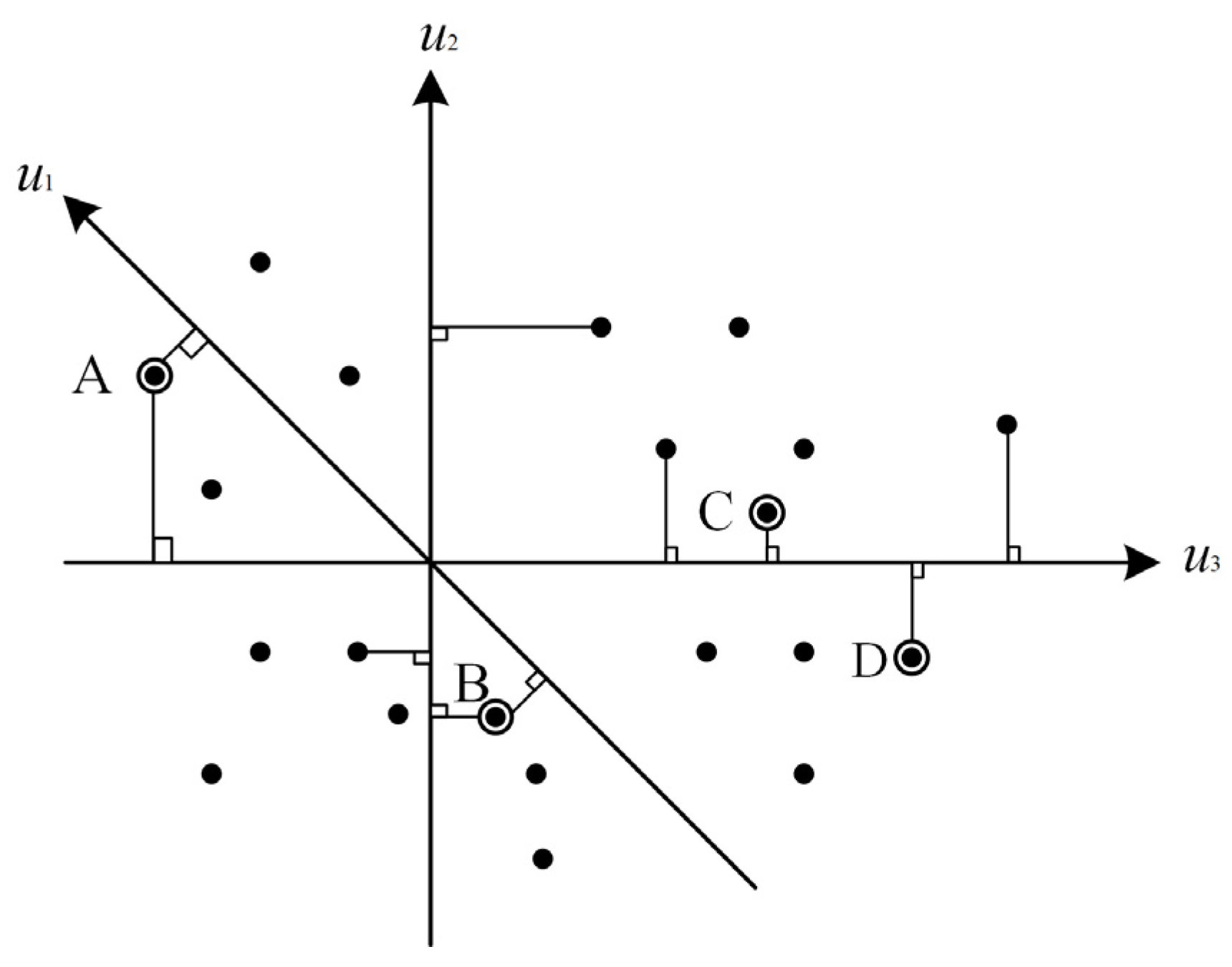
3.3.2. Pure Pixel Index (PPI) extraction
4. Results and Analysis
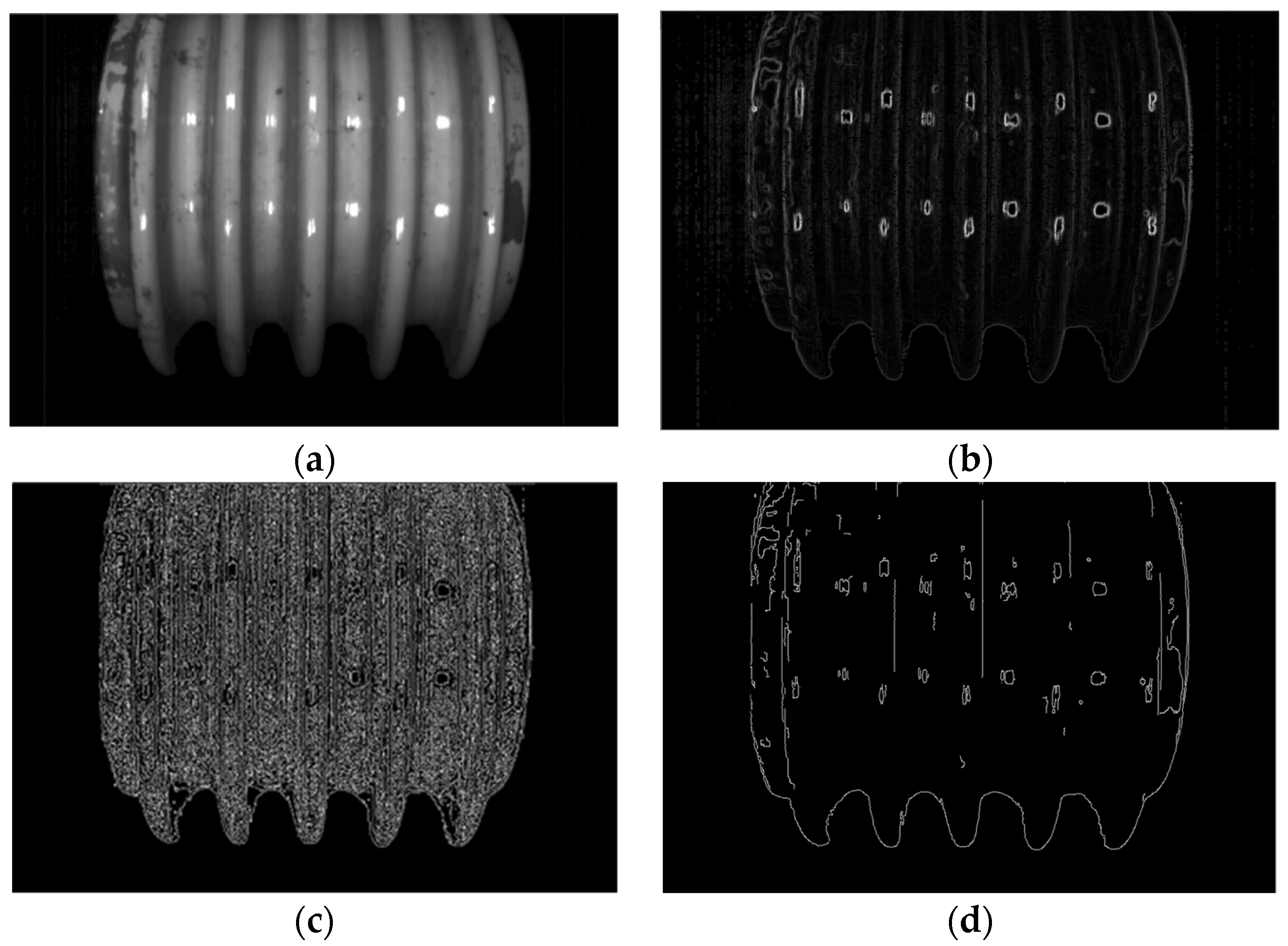
4.1. Results of Crack Localization of Porcelain Insulator
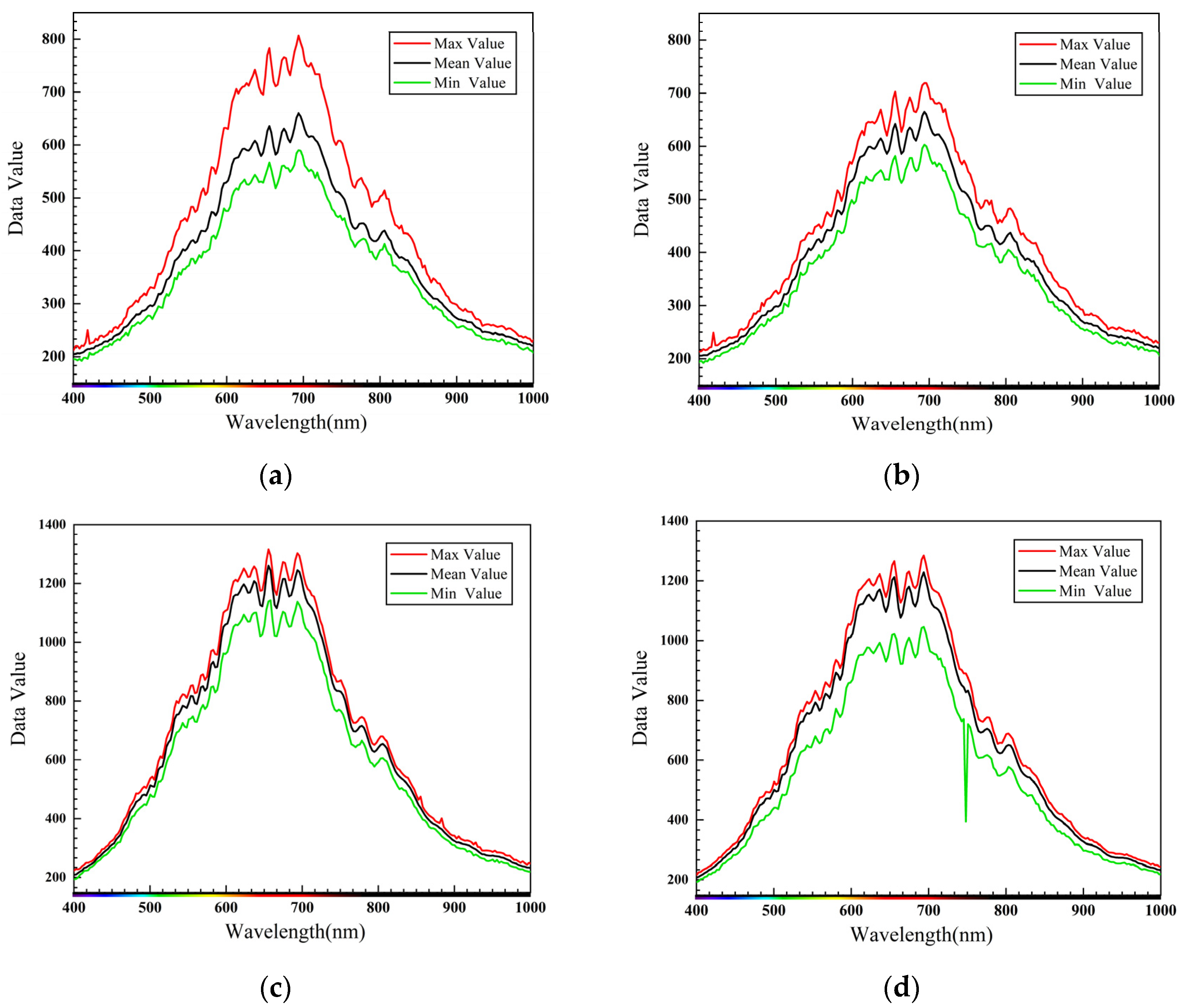
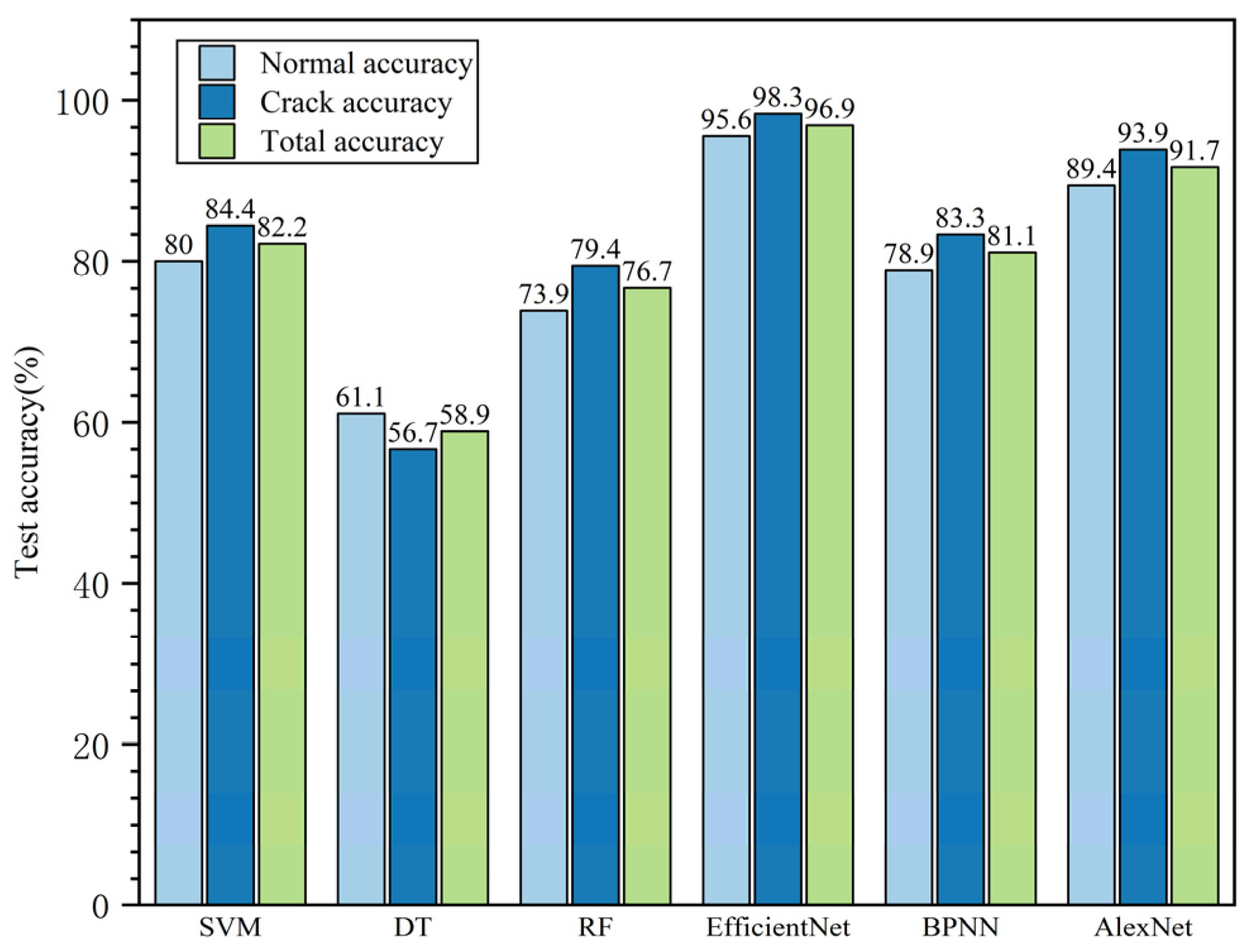
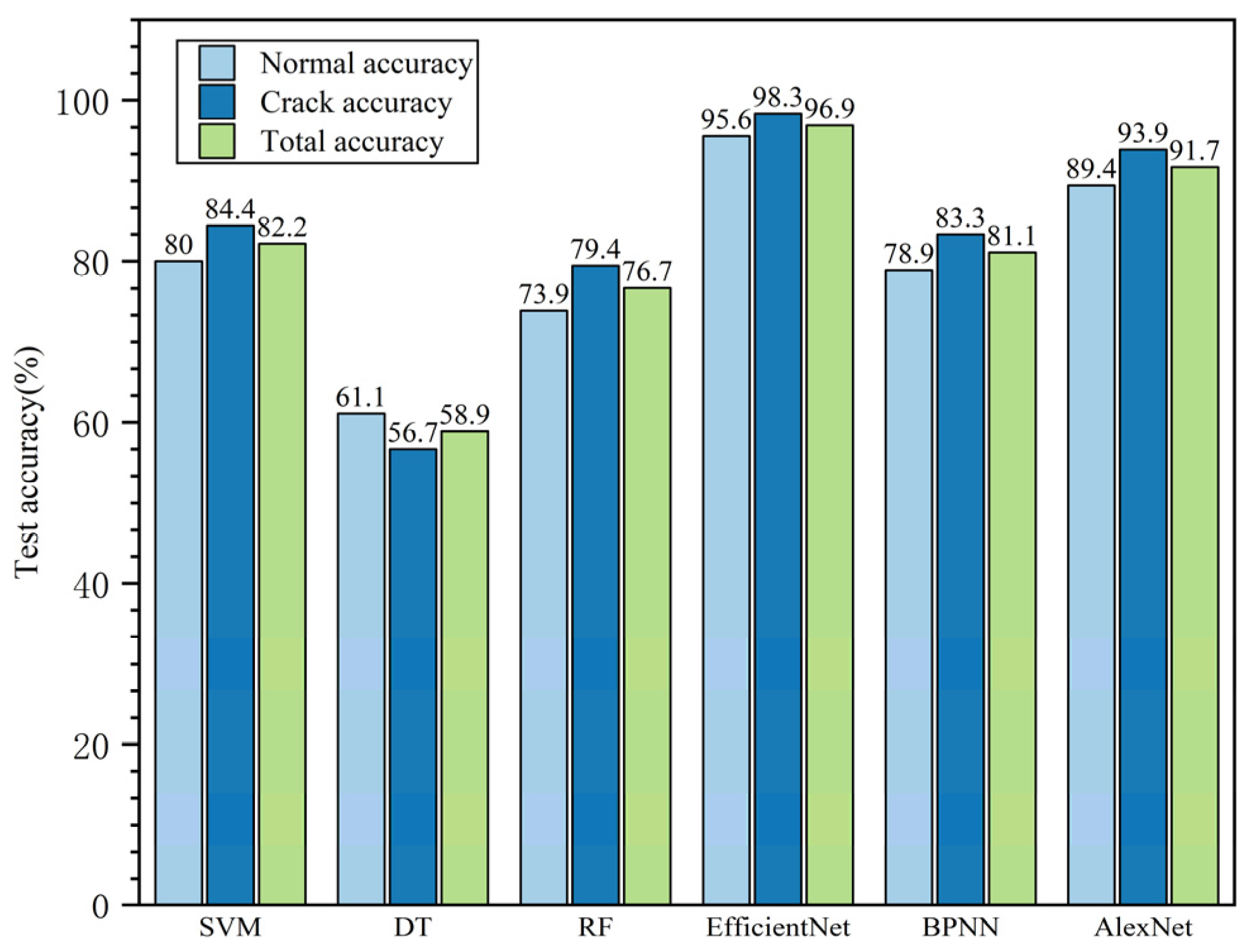
4.2. Classification Results of the Surface State of Porcelain Insulators
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ji, H.-x.; Li, C.; Ma, G.; Pang, Z.-k.; Tang, Z.-g.; Wen, H.; Cui, B. Partial discharge occurrence induced by crack defect on GIS insulator operated at 1100 kV. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 2250–2257. [Google Scholar] [CrossRef]
- Park, K.-C.; Motai, Y.; Yoon, J.R. Acoustic Fault Detection Technique for High-Power Insulators. IEEE Trans. Ind. Electron. 2017, 64, 9699–9708. [Google Scholar] [CrossRef]
- Persson, L.; Jonsson, A. Ultrasonic inspection of line pin post insulators and solid core insulators in switch gear stations. NDT E Int. 1993, 26, 115–117. [Google Scholar] [CrossRef]
- Hou, R.F.; Wang, W.H.; Mo, R.Y.; Liu, X.J. Laser-Ultrasound Testing of Cracks in Porcelain Insulator. Adv. Mater. Res. 2013, 774–776, 1349–1352. [Google Scholar] [CrossRef]
- Shen, X.; Jiang, X.; Cheng, Y.; MacAlpine, M. A Novel Method for Live Detection of Faulty Direct Current Insulators. IEEE Trans. Power Deliv. 2008, 23, 24–30. [Google Scholar] [CrossRef]
- Wei, H.; Fan, Y.; Jingang, W.; Hao, Y.; Minyou, C.; Degui, Y. Inverse application of charge simulation method in detecting faulty ceramic insulators and processing influence from tower. IEEE Trans. Magn. 2006, 42, 723–726. [Google Scholar] [CrossRef]
- Tao, X.; Zhang, D.; Wang, Z.; Liu, X.; Zhang, H.; Xu, D. Detection of Power Line Insulator Defects Using Aerial Images Analyzed with Convolutional Neural Networks. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1486–1498. [Google Scholar] [CrossRef]
- Zhai, Y.; Chen, R.; Yang, Q.; Li, X.; Zhao, Z. Insulator Fault Detection Based on Spatial Morphological Features of Aerial Images. IEEE Access 2018, 6, 35316–35326. [Google Scholar] [CrossRef]
- Gillooly, T.; Deborah, H.; Hardeberg, J.Y. Path Opening for Hyperspectral Crack Detection of Cultural Heritage Paintings. In Proceedings of the 2018 14th International Conference on Signal-Image Technology & Internet-Based Systems (SITIS), Las Palmas de Gran Canaria, Spain, 26–29 November 2018; pp. 651–657. [Google Scholar]
- Deborah, H.; Richard, N.; Hardeberg, J.Y. Hyperspectral crack detection in paintings. In Proceedings of the 2015 Colour and Visual Computing Symposium (CVCS), Gjovik, Norway, 25–26 August 2015; pp. 1–6. [Google Scholar]
- Zhang, R.; Ying, Y.; Rao, X.; Li, J. Quality and safety assessment of food and agricultural products by hyperspectral fluorescence imaging. J. Sci. Food Agric. 2012, 92, 2397–2408. [Google Scholar] [CrossRef]
- Alam, M.N.; Pineda, I.; Lim, J.G.; Gwun, J. Apple Defects Detection Using Principal Component Features of Multispectral Reflectance Imaging. Sci. Adv. Mater. 2018, 10, 1051–1062. [Google Scholar] [CrossRef]
- Yu, J.; Ren, S.; Liu, C.; Wei, B.; Zhang, L.; Younas, S.; Zheng, L. Non-destructive detection and classification of in-shell insect-infested almonds based on multispectral imaging technology. J. Agric. Sci. 2019, 156, 1103–1110. [Google Scholar] [CrossRef]
- Choi, J.-Y.; Heo, S.; Bae, S.; Kim, J.; Moon, K.-D. Discriminating the origin of basil seeds (Ocimum basilicum L.) using hyperspectral imaging analysis. LWT Food Sci. Technol. 2019, 118, 108715. [Google Scholar] [CrossRef]
- Wang, Z.; Du, B.; Zhang, L.; Zhang, L.; Jia, X. A Novel Semisupervised Active-Learning Algorithm for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3071–3083. [Google Scholar] [CrossRef]
- Jia, S.; Zhao, B.; Tang, L.; Feng, F.; Wang, W. Spectral–spatial classification of hyperspectral remote sensing image based on capsule network. J. Eng. 2019, 21, 7352–7355. [Google Scholar] [CrossRef]
- Shichao, Z.; Baojun, Z.; Linbo, T.; Wenzheng, W. Compressed spatial–spectral feature representation for hyperspectral ground classification. J. Eng. 2019, 21, 7928–7931. [Google Scholar] [CrossRef]
- Haut, J.M.; Bernabé, S.; Paoletti, M.E.; Fernandez-Beltran, R.; Plaza, A.; Plaza, J. Low–High-Power Consumption Architectures for Deep-Learning Models Applied to Hyperspectral Image Classification. IEEE Geosci. Remote Sens. Lett. 2019, 16, 776–780. [Google Scholar] [CrossRef]
- Dong, Y.; Yang, C.; Zhang, Y. Deep Metric Learning with Online Hard Mining for Hyperspectral Classification. Remote Sens 2021, 13, 1368. [Google Scholar] [CrossRef]
- Kim, J.; Lee, S. Extracting Major Lines by Recruiting Zero-Threshold Canny Edge Links along Sobel Highlights. IEEE Signal Process. Lett. 2015, 22, 1689–1692. [Google Scholar] [CrossRef]
- Xiang, S.; Zhang, H. Efficient edge-guided full-waveform inversion by Canny edge detection and bilateral filtering algorithms. Geophys. J. Int. 2016, 207, 1049–1061. [Google Scholar] [CrossRef]
- Shi, C.; Zeng, H.; Guo, Y.; Liu, K.; Zhang, X.; Wu, G. Surface Roughness Detection of Roof Insulator Based on Hyperspectral Technology. IEEE Access 2020, 8, 81651–81659. [Google Scholar] [CrossRef]
- Tan, M.; Le, Q. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. In Proceedings of the International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; pp. 6105–6114. [Google Scholar]
- Alhichri, H.; Alswayed, A.S.; Bazi, Y.; Ammour, N.; Alajlan, N.A. Classification of Remote Sensing Images Using EfficientNet-B3 CNN Model With Attention. IEEE Access 2021, 9, 14078–14094. [Google Scholar] [CrossRef]
- Atila, Ü.; Uçar, M.; Akyol, K.; Uçar, E. Plant leaf disease classification using EfficientNet deep learning model. Ecol. Inform. 2021, 61, 101182. [Google Scholar] [CrossRef]
- Shamsolmoali, P.; Zareapoor, M.; Yang, J. Convolutional neural network in network (CNNiN): Hyperspectral image classification and dimensionality reduction. IET Image Process. 2019, 13, 246–253. [Google Scholar] [CrossRef]
- Burger, J.E.; Geladi, P.L.M. Hyperspectral Image Data Conditioning and Regression Analysis. In Techniques and Applications of Hyperspectral Image Analysis; Wiley: Chichester, UK, 2007; pp. 127–153. [Google Scholar]
- Wang, Y.; Huang, S.; Liu, Z.; Wang, H.; Liu, D. Locality Preserving Projection Based on Endmember Extraction for Hyperspectral Image Dimensionality Reduction and Target Detection. Appl. Spectrosc. 2016, 70, 1573–1581. [Google Scholar] [CrossRef] [PubMed]
- Shah, D.; Zaveri, T.; Trivedi, Y.N.; Plaza, A. Entropy-Based Convex Set Optimization for Spatial–Spectral Endmember Extraction from Hyperspectral Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 4200–4213. [Google Scholar] [CrossRef]
- Sharma, L.K.; Verma, R.K. AVIRIS-NG hyperspectral data analysis for pre- and post-MNF transformation using per-pixel classification algorithms. Geocarto Int. 2020, 1–12. [Google Scholar] [CrossRef]
- Yang, M.-D.; Huang, K.-H.; Tsai, H.-P. Integrating MNF and HHT Transformations into Artificial Neural Networks for Hyperspectral Image Classification. Remote Sens. 2020, 12, 2327. [Google Scholar] [CrossRef]
- Wen, J.; Fowler, J.E.; He, M.; Zhao, Y.Q.; Deng, C.; Menon, V. Orthogonal Nonnegative Matrix Factorization Combining Multiple Features for Spectral–Spatial Dimensionality Reduction of Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4272–4286. [Google Scholar] [CrossRef]
- Pu, H.; Chen, Z.; Wang, B.; Jiang, G.-M. A Novel Spatial–Spectral Similarity Measure for Dimensionality Reduction and Classification of Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7008–7022. [Google Scholar]
- Luo, R.; Liao, W.; Huang, X.; Pi, Y.; Philips, W. Feature Extraction of Hyperspectral Images with Semisupervised Graph Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4389–4399. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Parameter | Meaning | Value |
|---|---|---|
| Spectral range(nm) | Measurable range | 400–1000 |
| Spectral band | Spectral range divided into intervals | 224 |
| Spectral resolution | Recording width in the wavelength direction | 5.5 nm |
| Signal noise ratio (SNR) | A higher SNR value denotes lower noise | 600:1 |
| Charge-coupled device (CCD) pixel | Affects low illumination and noise | 1392 × 1040 |
| Model 1 | Model 2 | Model 3 | Model 4 | Model 5 | |
|---|---|---|---|---|---|
| First Validation Acc (%) | 85.63 | 95.00 | 95.00 | 96.88 | 82.50 |
| Second Validation Acc (%) | 95.00 | 78.12 | 88.13 | 95.63 | 93.75 |
| Third Validation Acc (%) | 98.13 | 98.13 | 83.75 | 86.88 | 91.88 |
| Average Acc (%) | 92.92 | 90.42 | 88.96 | 93.13 | 89.38 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Yan, J.; Wang, Y.; Jing, Q.; Liu, T. Porcelain Insulator Crack Location and Surface States Pattern Recognition Based on Hyperspectral Technology. Entropy 2021, 23, 486. https://doi.org/10.3390/e23040486
Zhao Y, Yan J, Wang Y, Jing Q, Liu T. Porcelain Insulator Crack Location and Surface States Pattern Recognition Based on Hyperspectral Technology. Entropy. 2021; 23(4):486. https://doi.org/10.3390/e23040486
Chicago/Turabian StyleZhao, Yiming, Jing Yan, Yanxin Wang, Qianzhen Jing, and Tingliang Liu. 2021. "Porcelain Insulator Crack Location and Surface States Pattern Recognition Based on Hyperspectral Technology" Entropy 23, no. 4: 486. https://doi.org/10.3390/e23040486
APA StyleZhao, Y., Yan, J., Wang, Y., Jing, Q., & Liu, T. (2021). Porcelain Insulator Crack Location and Surface States Pattern Recognition Based on Hyperspectral Technology. Entropy, 23(4), 486. https://doi.org/10.3390/e23040486