
Synchronization of the Glycolysis Reaction-Diffusion Model via Linear Control Law


 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Formulation
- Based on proposition 1 in [55] and since are continuous and differentiable functions in which and , for all , we can deduce that system (1) has a local unique solution on , and furthermore there are two continuous functions such that:
- There is a constant and a continuous function such that , for all with . This, consequently, implies:
- There is a continuous function so that , with . This, consequently, implies:
- The solution is still uniformly bounded as a function of t in each bounded interval. To see this, one can refer to Lemma 2.2 in [54].
3. Synchronization
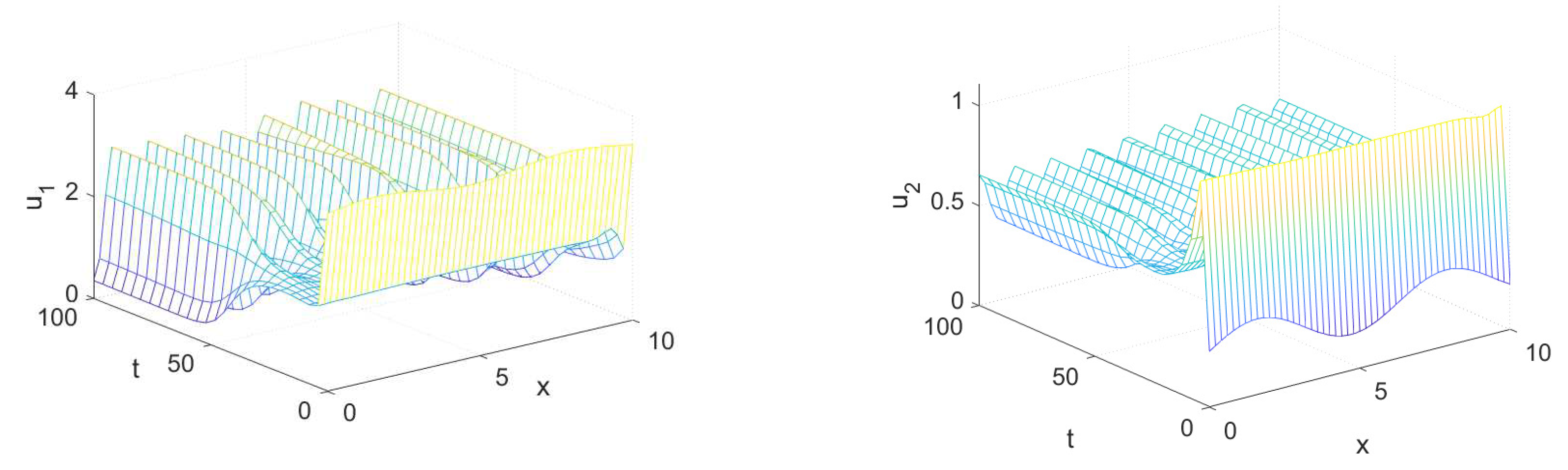
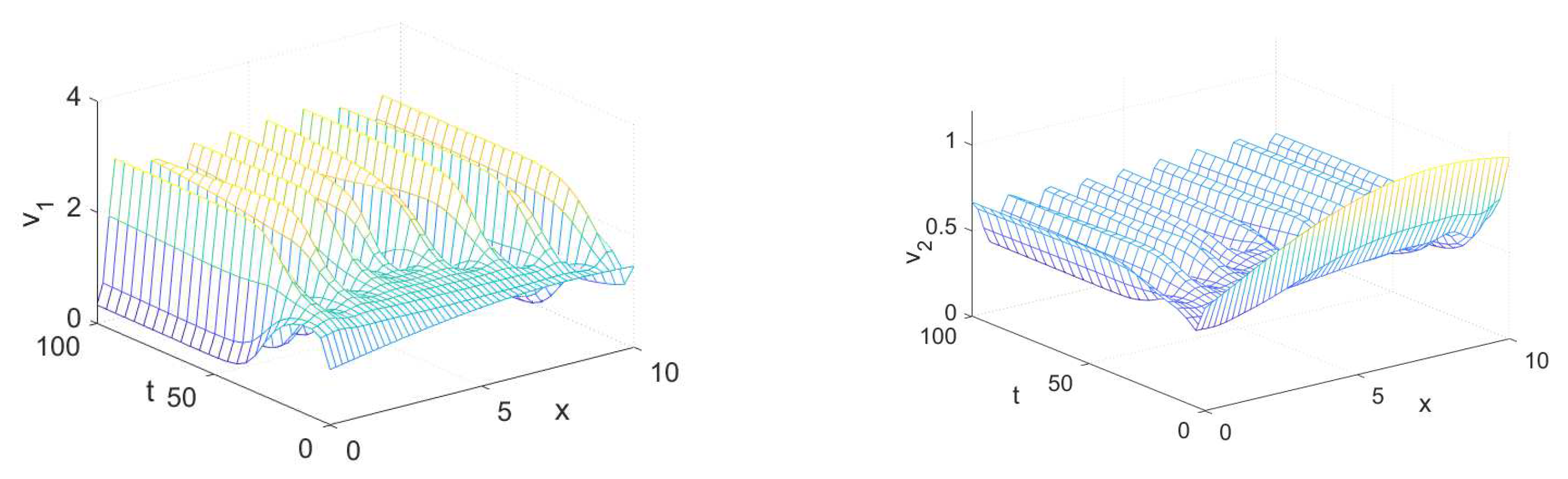
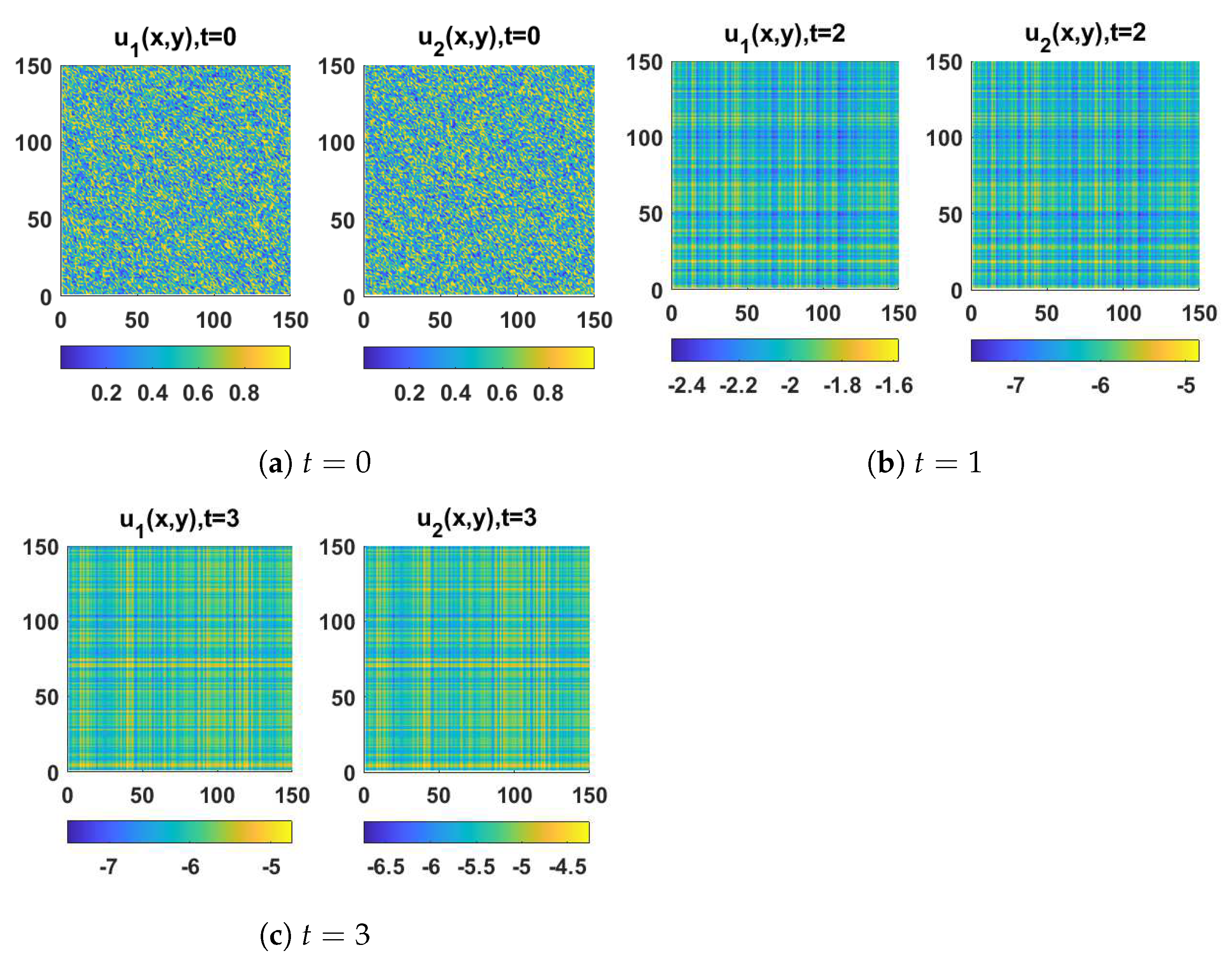
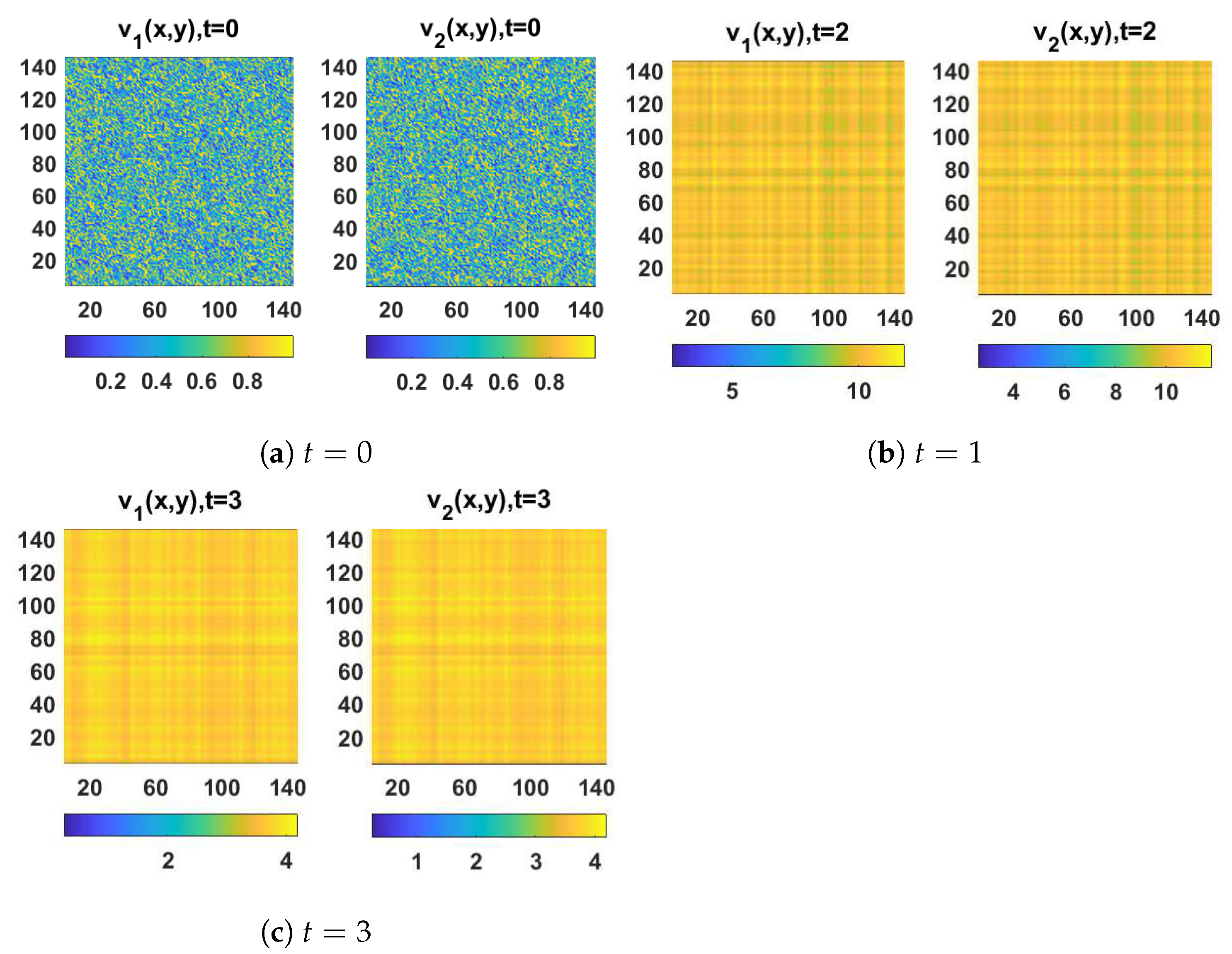
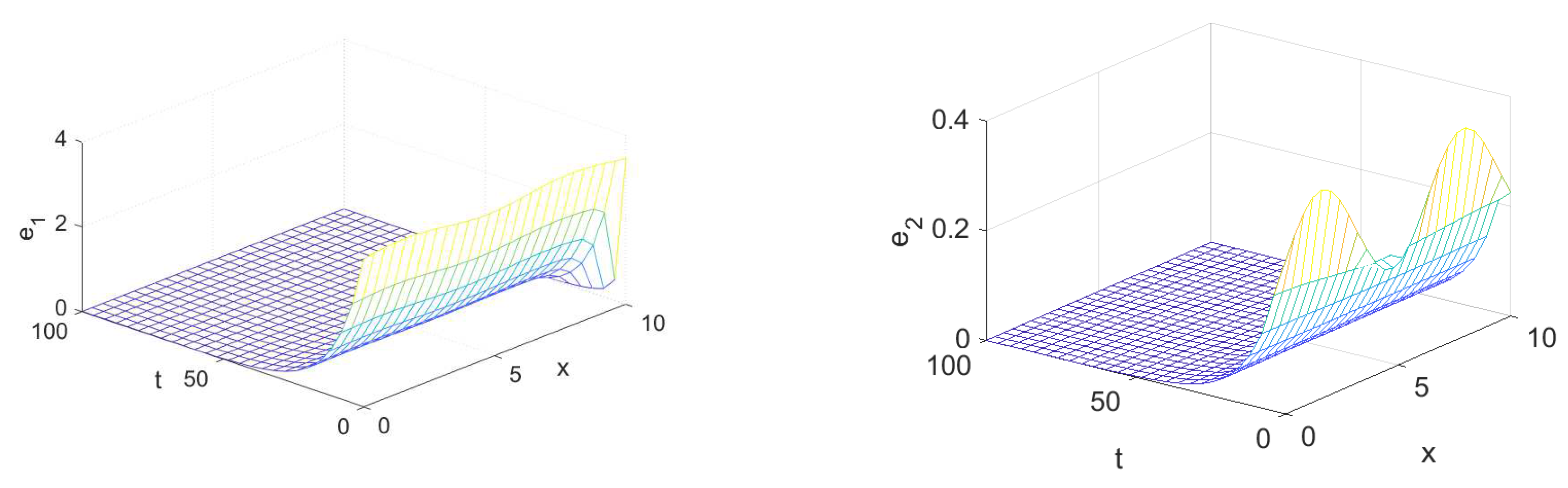
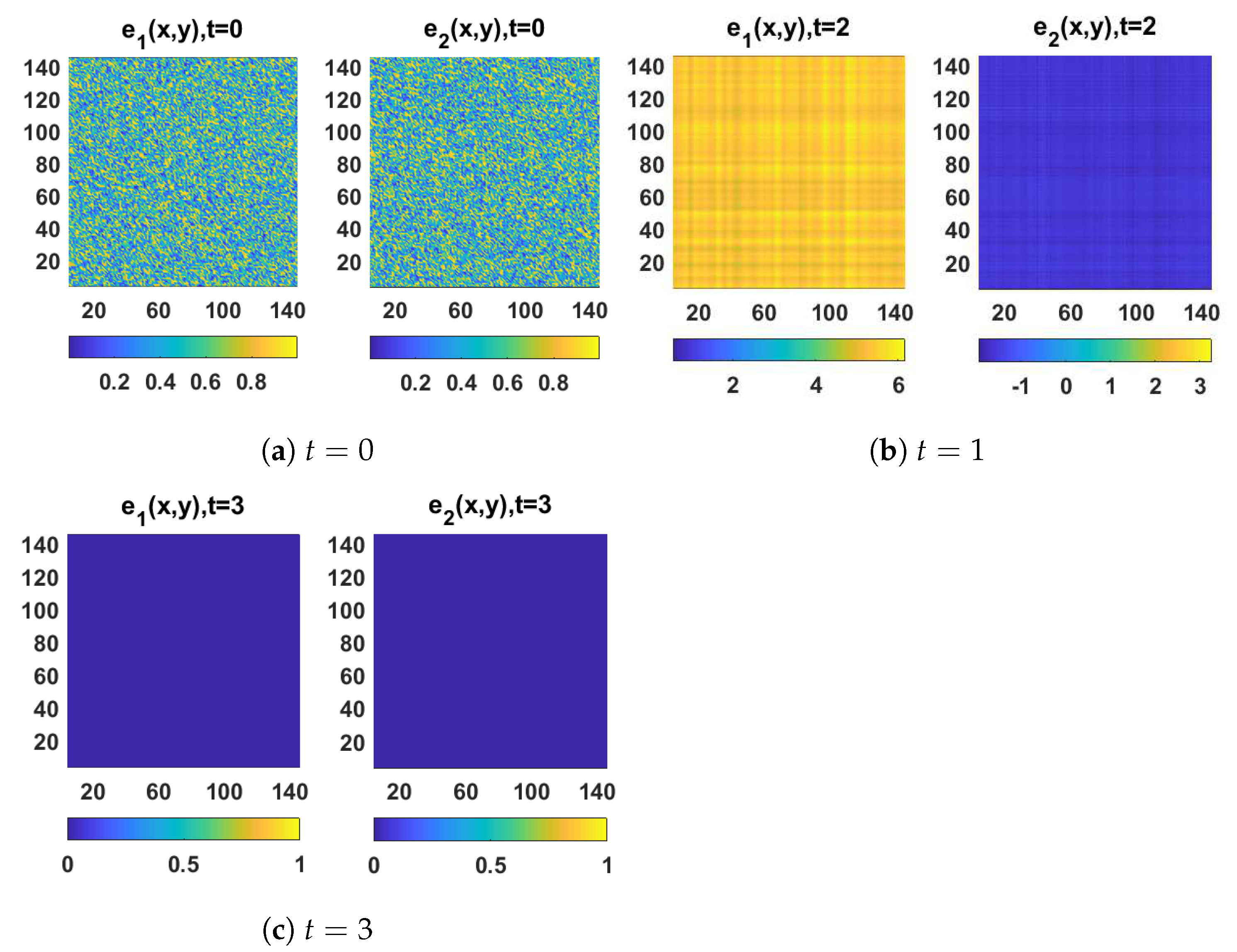
4. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Eroglu, D.; Lamb, J.S.W.; Pereira, T. Synchronisation of chaos and its applications. Contemp. Phys. 2017, 58, 207–243. [Google Scholar] [CrossRef]
- Srivastava, M.; Ansari, S.P.; Agrawal, S.K.; Das, S.; Leung, A.Y.T. Anti-synchronization between identical and non-identical fractional-order chaotic systems using active control method. Nonlinear Dyn. 2014, 76, 905–914. [Google Scholar] [CrossRef]
- Odibat, Z.M.; Corson, N.; Aziz-Alaoui, M.A.; Bertelle, C. Synchronization of chaotic fractional-order systems via linear control. Int. J. Bifurc. Chaos 2010, 20, 81–97. [Google Scholar] [CrossRef]
- Chen, X.R.; Liu, C.X. Chaos synchronization of fractional order unified chaotic system via nonlinear control. Int. J. Mod. Phys. B 2011, 25, 407–415. [Google Scholar] [CrossRef]
- Agrawal, S.K.; Das, S. A modified adaptive control method for synchronization of some fractional chaotic systems with unknown parameters. Nonlinear Dyn. 2013, 73, 907–919. [Google Scholar] [CrossRef]
- Odibat, Z.M. Adaptive feedback control and synchronization of non-identical chaotic fractional order systems. Nonlinear Dyn. 2010, 60, 479–487. [Google Scholar] [CrossRef]
- Jahanshahi, H. Smooth control of HIV/AIDS infection using a robust adaptive scheme with decoupled sliding mode supervision. Eur. Phys. J. Spec. Top. 2018, 227, 707–718. [Google Scholar] [CrossRef]
- Jahanshahi, H.; Rajagopal, K.; Akgul, A.; Sari, N.N.; Namazi, H.; Jafari, S. Complete analysis and engineering applications of a megastable nonlinear oscillator. Int. J. Non-Linear Mech. 2018, 107, 126–136. [Google Scholar] [CrossRef]
- Jahanshahi, H.; Shahriari-Kahkeshi, M.; Alcaraz, R.; Wang, X.; Singh, V.P.; Pham, V.-T. Entropy analysis and neural network-based adaptive control of a non-equilibrium four-dimensional chaotic system with hidden attractors. Entropy 2019, 21, 156. [Google Scholar] [CrossRef]
- Jahanshahi, H.; Yousefpour, A.; Munoz-Pacheco, J.M.; Moroz, I.; Wei, Z.; Castillo, O. A new multi-stable fractional-order four-dimensional system with self-excited and hidden chaotic attractors: Dynamic analysis and adaptive synchronization using a novel fuzzy adaptive sliding mode control method. Appl. Soft Comput. 2020, 87, 105943. [Google Scholar] [CrossRef]
- Jahanshahi, H.; Yousefpour, A.; Munoz-Pacheco, J.M.; Kacar, S.; Pham, V.-T.; Alsaadi, F.E. A new fractional-order hyperchaotic memristor oscillator: Dynamic analysis, robust adaptive synchronization, and its application to voice encryption. Appl. Math. Comput. 2020, 383, 125310. [Google Scholar] [CrossRef]
- Wang, B.; Jahanshahi, H.; Bekiros, S.; Chu, Y.-M.; Gomez-Aguilar, J.F.; Alsaadi, F.E. Tracking control and stabilization of a fractional financial risk system using novel active finite-time fault-tolerant controls. Fractals 2021, 29, 2150155-77. [Google Scholar] [CrossRef]
- Wang, B.; Jahanshahi, H.; Volos, C.; Bekiros, S.; Khan, M.A.; Agarwal, P. A New RBF Neural Network-Based Fault-Tolerant Active Control for Fractional Time-Delayed Systems. Electronics 2021, 10, 1501. [Google Scholar] [CrossRef]
- Xiong, P.-Y.; Jahanshahi, H.; Alcaraz, R.; Chu, Y.-M.; Gómez-Aguilar, J.F.; Alsaadi, F.E. Spectral entropy analysis and synchronization of a multi-stable fractional-order chaotic system using a novel neural network-based chattering-free sliding mode technique. Chaos Solitons Fractals 2021, 144, 110576. [Google Scholar] [CrossRef]
- Jahanshahi, H.; Sajjadi, S.S.; Bekiros, S.; Aly, A.A. On the development of variable-order fractional hyperchaotic economic system with a nonlinear model predictive controller. Chaos Solitons Fractals 2021, 144, 110698. [Google Scholar] [CrossRef]
- Razminia, A.; Baleanu, D. Complete synchronization of commensurate fractional order chaotic systems using sliding mode control. Mechatronics 2013, 23, 873–879. [Google Scholar] [CrossRef]
- Al-sawalha, M.M.; Alomari, A.K.; Goh, S.M.; Nooran, M.S.M. Active antisynchronization of two identical and different fractional-order chaotic systems. Int. J. Nonlinear Sci. 2011, 11, 267–274. [Google Scholar]
- Si, G.; Sun, Z.; Zhang, Y.; Chen, W. Projective synchronization of different fractional-order chaotic systems with non-identical orders. Nonlinear Anal. Real World Appl. 2012, 13, 1761–1771. [Google Scholar] [CrossRef]
- Yi, C.; Liping, C.; Ranchao, W.; Juan, D. Q-S synchronization of the fractionalorder unified system. Pramana 2013, 80, 449–461. [Google Scholar]
- Feng, H.; Yang, Y.; Yang, S.P. A new method for full state hybrid projective synchronization of different fractional order chaotic systems. Appl. Mech. Mater. 2013, 385, 919–922. [Google Scholar] [CrossRef]
- Zhang, X.D.; Zhao, P.D.; Li, A.H. Construction of a new fractional chaotic system and generalized synchronization. Commun. Theor. Phys. 2010, 53, 1105–1110. [Google Scholar]
- Ouannas, A.; Al-sawalha, M.M. On Λ − φ generalized synchronization of chaotic dynamical systems in continuous-time. Eur. Phys. J. Spec. Top. 2016, 225, 187–196. [Google Scholar] [CrossRef]
- Ouannas, A.; Al-sawalha, M.M.; Ziar, T. Fractional chaos synchronization schemes for different dimensional systems with non-identical fractional-orders via two scaling matrices. Optik 2016, 127, 8410–8418. [Google Scholar] [CrossRef]
- Jahanshahi, H.; Chen, D.; Chu, Y.-M.; Gómez-Aguilar, J.F.; Aly, A.A. Enhancement of the performance of nonlinear vibration energy harvesters by exploiting secondary resonances in multi-frequency excitations. Eur. Phys. J. Plus. 2021, 136, 1–22. [Google Scholar] [CrossRef]
- Li, J.-F.; Jahanshahi, H.; Kacar, S.; Chu, Y.-M.; Gómez-Aguilar, J.F.; Alotaibi, N.D. On the variable-order fractional memristor oscillator: Data security applications and synchronization using a type-2 fuzzy disturbance observer-based robust control. Chaos Solitons Fractals 2021, 145, 110681. [Google Scholar] [CrossRef]
- Wang, Y.-L.; Jahanshahi, H.; Bekiros, S.; Bezzina, F.; Chu, Y.-M.; Aly, A.A. Deep recurrent neural networks with finite-time terminal sliding mode control for a chaotic fractional-order financial system with market confidence. Chaos Solitons Fractals 2021, 146, 110881. [Google Scholar] [CrossRef]
- Bekiros, S.; Jahanshahi, H.; Bezzina, F.; Aly, A.A. A novel fuzzy mixed H2/H optimal controller for hyperchaotic financial systems. Chaos Solitons Fractals 2021, 146, 110878. [Google Scholar] [CrossRef]
- Wang, H.; Jahanshahi, H.; Wang, M.-K.; Bekiros, S.; Liu, J.; Aly, A.A. A Caputo–Fabrizio Fractional-Order Model of HIV/AIDS with a Treatment Compartment: Sensitivity Analysis and Optimal Control Strategies. Entropy 2021, 23, 610. [Google Scholar] [CrossRef]
- Wang, B.; Jahanshahi, H.; Volos, C.; Bekiros, S.; Yusuf, A.; Agarwal, P. Control of a symmetric chaotic supply chain system using a new fixed-time super-twisting sliding mode technique subject to control input limitations. Symmetry 2021, 13, 1257. [Google Scholar] [CrossRef]
- Liu, Z.; Jahanshahi, H.; Gómez-Aguilar, J.F.; Fernandez-Anaya, G.; Torres-Jiménez, J.; Aly, A.A.; Aljuaid, A.M. Fuzzy adaptive control technique for a new fractional-order supply chain system. Phys. Scripta. 2021, 96, 124017. [Google Scholar] [CrossRef]
- Wang, B.; Jahanshahi, H.; Dutta, H.; Zambrano-Serrano, E.; Grebenyuk, V.; Bekiros, S. Incorporating fast and intelligent control technique into ecology: A Chebyshev neural network-based terminal sliding mode approach for fractional chaotic ecological systems. Ecol. Complex. 2021, 47, 100943. [Google Scholar] [CrossRef]
- Ahmed, N.; Tahira, S.S.; Imran, M.; Rafiq, M.; Rehman, M.A.; Younis, M. Numerical analysis of auto-catalytic glycolysis model. Aip Adv. 2019, 9, 085213. [Google Scholar] [CrossRef]
- Baleanua, D.; Inc, M.; Yusuf, A.; Aliyu, A.I. Lie symmetry analysis, exact solutions and conservation laws for the time fractional modified Zakharov–Kuznetsov equation. Nonlinear Anal. Model. Control 2017, 22, 861–876. [Google Scholar] [CrossRef]
- Younis, M.; Rizvi, S.T.R. Optical soliton like-pulses in ring-cavity fiber lasers of carbon nanotubes. Nanoelectron. Optoelectron. 2016, 11, 276–279. [Google Scholar] [CrossRef]
- Zhou, J.; Shi, J. Pattern formation in a general glycolysis reaction-diffusion system. J. Appl. Math. 2015, 80, 1703–1738. [Google Scholar] [CrossRef][Green Version]
- Romano, A.H.; Conway, T. Evolution of carbohydrate metabolic pathways. Res. Microbiol. 1996, 147, 448–455. [Google Scholar] [CrossRef]
- Lane, A.N.; Fan, T.W.M.; Higashi, R.M. Metabolic acidosis and the importance of balanced equation. Metabolomics 2009, 5, 163–165. [Google Scholar] [CrossRef]
- SelKov, E.E. Self-oscillation in glycolysis 1. A simple model. Eur. J. Biochem. 1968, 4, 79–86. [Google Scholar] [CrossRef] [PubMed]
- Strogatz, S.H. Nonlinear Dynamics and Chaos with Applications to Physics, Biology, Chemistry, and Engineering; Adisson-Wesley: New York, NY, USA, 1994. [Google Scholar]
- Mesdoui, F.; Ouannas, A.; Shawagfeh, N.; Grassi, G.; Pham, V.-T. Synchronization Methods for the Degn-Harrison Reaction-Diffusion Systems. IEEE Access 2020, 8, 91829–91836. [Google Scholar] [CrossRef]
- Wu, F.; Wang, Y.; Ma, J.; Jin, W.; Hobiny, A. Multi-channels coupling-induced pattern transition in a tri-layer neuronal network. Phys. Stat. Mech. Its Appl. 2018, 493, 54–68. [Google Scholar] [CrossRef]
- Ambrosio, B.; Aziz-Alaoui, M.A. Synchronization and control of coupled reaction–diffusion systems of the FitzHugh–Nagumo type. Comput. Math. Appl. 2012, 64, 934–943. [Google Scholar] [CrossRef]
- Mansouri, D.; Bendoukha, S.; Abdelmalek, S.; Youkana, A. On the complete synchronization of a time-fractional reaction–diffusion system with the Newton–Leipnik nonlinearity. Appl. Anal. 2019, 100, 675–694. [Google Scholar] [CrossRef]
- Parekh, N.; Kumar, V.R.; Kulkarni, B.D. Control of spatiotemporal chaos: A study with an autocatalytic reaction-diffusion system. Pramana J. Phys. 1997, 48, 303–323. [Google Scholar] [CrossRef]
- García, P.; Acosta, A.; Leiva, H. Synchronization conditions for master-slave reaction diffusion systems. EPL 2009, 88, 60006. [Google Scholar] [CrossRef]
- Wu, K.-N.; Tian, T.; Wang, L. Synchronization for a class of coupled linear partial differential systems via boundary control. J. Frankl. Inst. 2016, 353, 4062–4073. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, H. Synchronized stability in a reaction–diffusion neural network model. Phys. Lett. A 2014, 378, 3586–3599. [Google Scholar] [CrossRef]
- Ouannas, A.; Abdelli, M.; Odibat, Z. Synchronization Control in Reaction-Diffusion Systems: Application to Lengyel-Epstein System. Complexity 2019, 2019, 8. [Google Scholar] [CrossRef]
- Mesdoui, F.; Shawagfeh, N.; Ouannas, A. Global synchronization of fractional-order and integer-order N component reaction diffusion systems: Application to biochemical models. Math. Meth. Appl. Sci. 2020, 44, 1003–1012. [Google Scholar] [CrossRef]
- Westermark, P.O.; Lansner, A. A Model of Phosphofructokinase and Glycolytic Oscillations in the Pancreatic β-cell. Biophys. J. 2003, 85, 126–139. [Google Scholar] [CrossRef]
- Bhargava, S.C. On the higgins model of glycolysis. Bull. Math. Biol. 1980, 42, 829–836. [Google Scholar] [CrossRef]
- Peng, R. Qualitative analysis of steady states to the Sel’kov model. J. Differ. Equ. 2007, 241, 386–398. [Google Scholar] [CrossRef]
- Lee, K.J.; Swinney, H.L. Replicating Spots in Reaction-Diffusion Systems. Int. J. Bifurc. Chaos 1997, 07, 1149–1158. [Google Scholar] [CrossRef]
- You, Y. Asymptotical dynamics of Selkov equations. Discret. Contin. Dyn. Syst. 2009, 2, 193. [Google Scholar] [CrossRef]
- Hollis, S.L.; Martin, R.H., Jr.; Pierre, M. Global Existence and Boundedness in Reaction-Diffusion Systems. SIAM J. Math. Anal. 1987, 18, 744–761. [Google Scholar] [CrossRef]
- Baleanu, D.; Zibaei, S.; Namjoo, M.; Jajarmi, A. A nonstandard finite difference scheme for the modeling and nonidentical synchronization of a novel fractional chaotic system. Adv. Differ. Equ. 2021, 2021, 308. [Google Scholar] [CrossRef]
- Han, Y.; Zhao, J. Accurate substrate analysis based on a novel finite difference method via synchronization method on layered and adaptive meshing. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2013, 32, 1520–1532. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouannas, A.; Batiha, I.M.; Bekiros, S.; Liu, J.; Jahanshahi, H.; Aly, A.A.; Alghtani, A.H. Synchronization of the Glycolysis Reaction-Diffusion Model via Linear Control Law. Entropy 2021, 23, 1516. https://doi.org/10.3390/e23111516
Ouannas A, Batiha IM, Bekiros S, Liu J, Jahanshahi H, Aly AA, Alghtani AH. Synchronization of the Glycolysis Reaction-Diffusion Model via Linear Control Law. Entropy. 2021; 23(11):1516. https://doi.org/10.3390/e23111516
Chicago/Turabian StyleOuannas, Adel, Iqbal M. Batiha, Stelios Bekiros, Jinping Liu, Hadi Jahanshahi, Ayman A. Aly, and Abdulaziz H. Alghtani. 2021. "Synchronization of the Glycolysis Reaction-Diffusion Model via Linear Control Law" Entropy 23, no. 11: 1516. https://doi.org/10.3390/e23111516
APA StyleOuannas, A., Batiha, I. M., Bekiros, S., Liu, J., Jahanshahi, H., Aly, A. A., & Alghtani, A. H. (2021). Synchronization of the Glycolysis Reaction-Diffusion Model via Linear Control Law. Entropy, 23(11), 1516. https://doi.org/10.3390/e23111516