
Falkner–Skan Flow with Stream-Wise Pressure Gradient and Transfer of Mass over a Dynamic Wall



Abstract
1. Introduction
- Flow along impermeable wall with zero mass transfer for different accelerated values of main stream.
- Flow for different rate of mass transfer over stationary wall with fixed acceleration of main stream.
- Flow along dynamic wall with zero mass transfer and maximum acceleration of main stream.
- Provides quality, highly reliable, and effective solutions.
- Generally, computational techniques give solutions based on predefined discrete inputs, while the proposed methodology readily produces random inputs in the given entire span.
- No initial guess is required. The proposed scheme is an unsupervised technique.
- Applicable for complex models where the traditional solvers get stuck in a local optimum. The advent of computational methods increased the use of stochastic computational methods for dealing with complicated mathematical models for which conventional methods fail.
2. Formulation of the Falkner–Skan Boundary Layer System
- or or ,
- volume flow rate in the x-direction ,
- volume flow rate in the y-direction ,
3. ANN Based Structure of the FS Boundary Layer System
Optimization Procdure
| Algorithm 1 Pseudo Code of Optimization Algorithm ANN-SCA-SQP. In which, Tolerance a Stopping Criteria |
| Start: Sine-Cosine Algorithm(SCA) Inputs: Unknown(weights) Population , for number of unknown(weights) W in P and T is stand for transpose. Output: Best weights of , i.e., Begin → Initialization Randomly generation of vector W Consist on real values in provided interval Set of m weights vectors formulate the preliminary population P. / / Stopping-Criteria (SC) Solver-SC → if achieving one of the following: Fitness value . Tol-Fun (Function Tolerance) Tol-Con (Constrained Tolerance) . //Main-loop of SCA While any of SC parameter satisfy do → Fitness calculation-step Evaluate objective function e as in Equation (9) for the vector W. Repeat for weights W of the population . → Check for If SC achieved, then exit from loop else continues. → Parameters of Update the population and repeat from the fitness evaluation End → Storing step Store the best information vector and respective fitness value, time, and function evaluated for the current run of the End SCA |
| Start SQP → Initialization of Initialize SQP method with of SCA as an initial weight(point) vector. Set the Stopping criteria : Max-Iter (Maximum iterations), i.e., 1000, Tol-Fun as Tol-Con as and Tolerance in optimization variables(weights), i.e., Tol-X as , While any of SC Value satisfy do → Next step: Calculation of Fitness Evaluate e values using Equation (9) for the weight vector. → Check for step If achieved, then exit from loop else continues. → Update step Set ’fmincon’ function with technique ’Sequential Quadratic Programming’ Update weight vector for each step through SQP standard procedures. Repeat procedure from fitness calculation step End → Storing step Store the final weight vector along its fitness value, time, generation consumed and function evaluated for the current run of the SCA-SQP method. End SQP Evaluation: Execute the mechanism of SCA-SQP for multiple independent runs for generation of sufficient data for reliable and effective evaluation of performance. |
4. Performance Matrices
5. Empirical Results and Discussion
5.1. Problem 1: Dynamics of FSS Based on the Variation of Stream-Wise Pressure Gradient
5.2. Problem 2: Dynamics of FSS Based on the Variation of Wall Mass Transfer Parameter
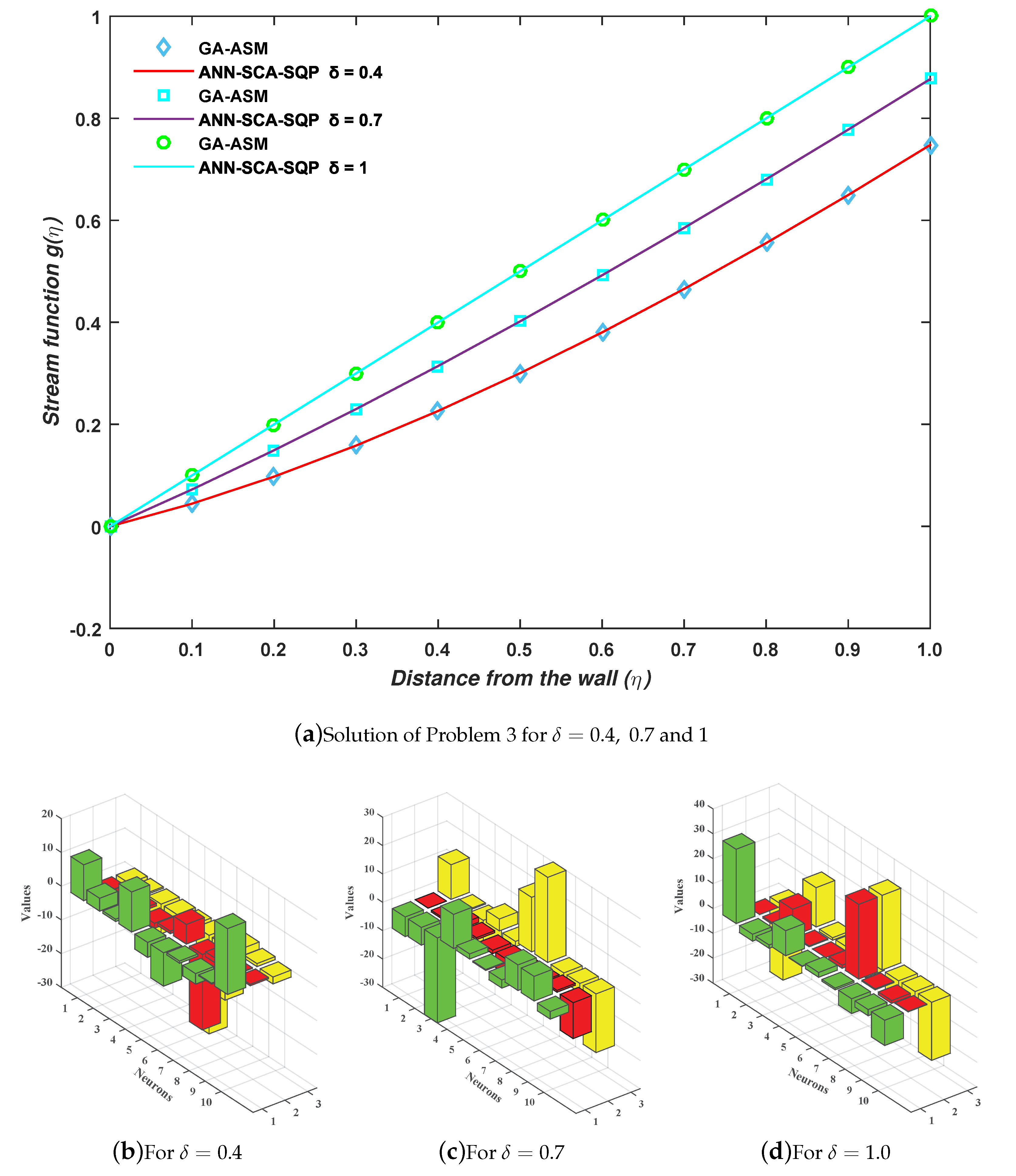
5.3. Problem 3: Dynamics of FSS Based on the Variation of Wall Stretching Factor
6. Evaluation through Performance Matrices
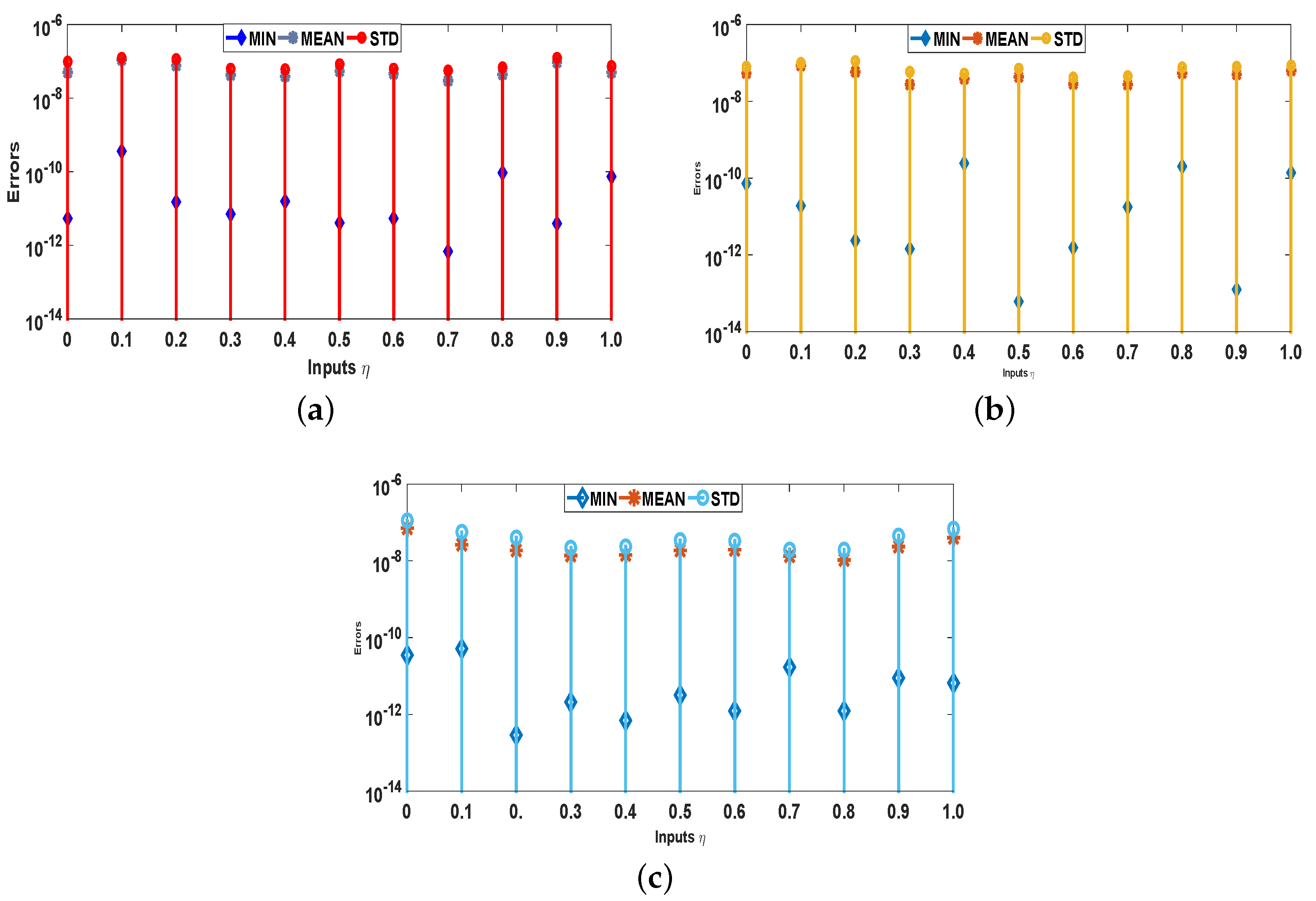
6.1. Accuracy and Convergence
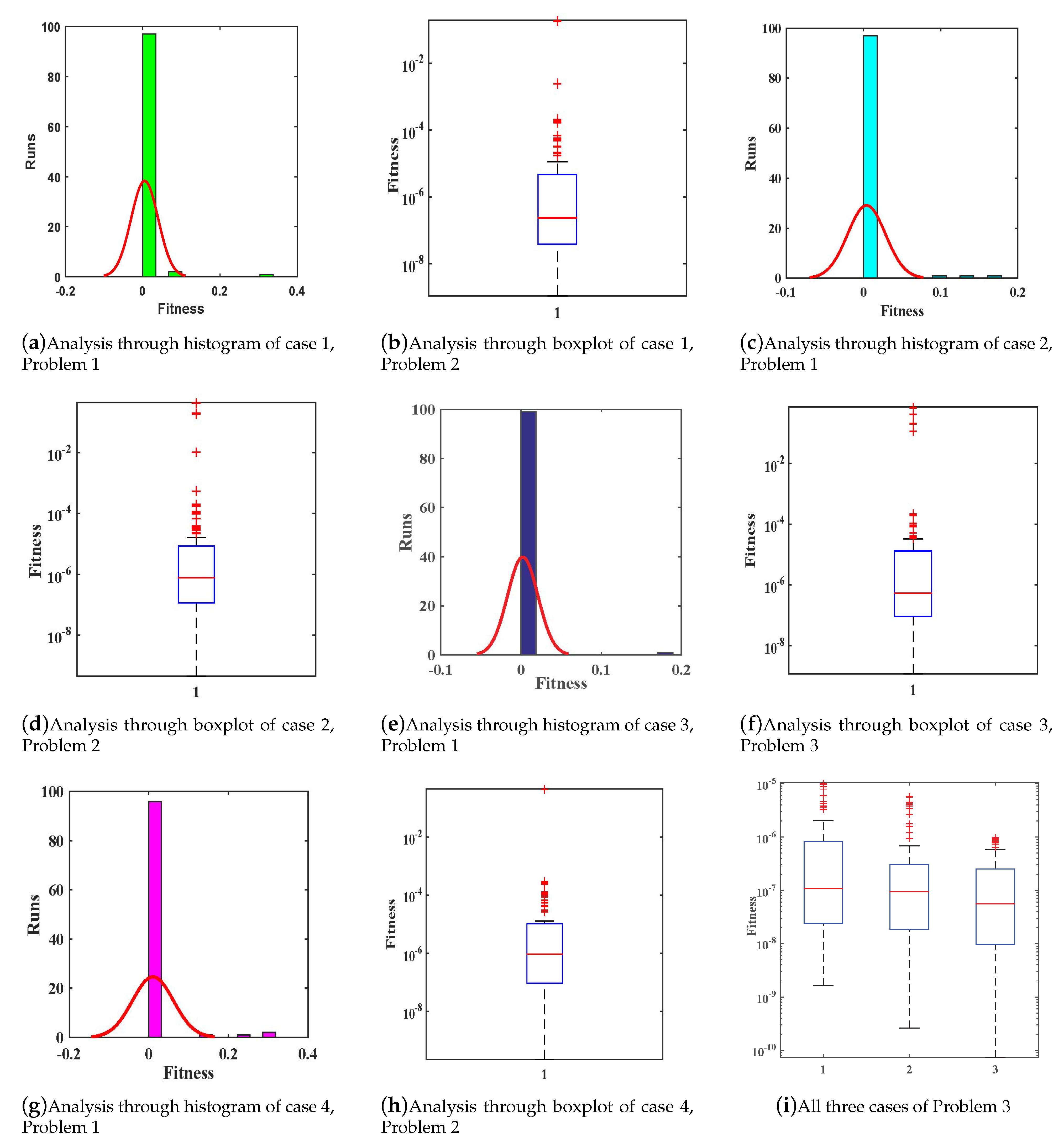
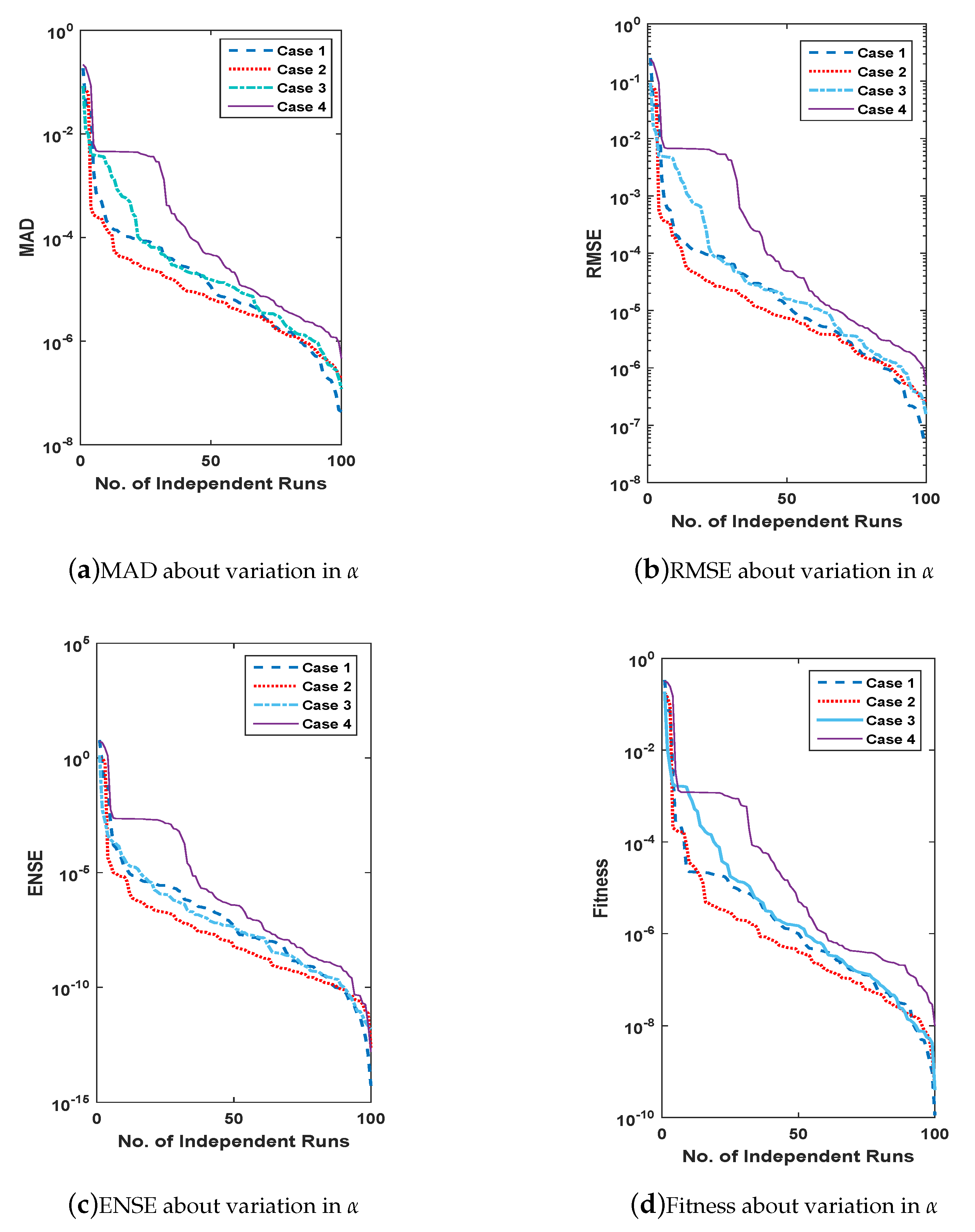
6.2. Analysis Based on Global Performance Indices
6.3. Complexity Analysis
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Activation function | |
| Approximate ANN based Solution | |
| GA | Genetic Algorithm |
| ASM | Active Set Method |
| FSS | Falkner–Skan System |
| SCA | Sine-Cosine Algorithm |
| STD | Standard Deviation |
| SQP | Sequential Quadratic Programming |
| ANN | Artificial Neural Network |
| MAD | Mean-Absolute Derivation |
| RMSE | Root-Mean Square Error |
| ENSE | Error in Nash-Sutcliffe Efficiency |
Appendix A
References
- Chanson, H. Applied Hydrodynamics: An Introduction to Ideal and Real Fluid Flows; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Nazarenko, S. Fluid Dynamics via Examples and Solutions; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Eckert, M. The Dawn of Fluid Dynamics: A Discipline between Science and Technology; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Pletcher, R.H.; Tannehill, J.C.; Anderson, D. Computational Fluid Mechanics and Heat Transfer; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- González-Avilés, J.; Cruz-Osorio, A.; Lora-Clavijo, F.; Guzmán, F. Newtonian CAFE: A new ideal MHD code to study the solar atmosphere. Mon. Not. R. Astron. Soc. 2015, 454, 1871–1885. [Google Scholar] [CrossRef][Green Version]
- González-Avilés, J.J.; Guzman, F.S.; Fedun, V. JET formation in solar atmosphere due to magnetic reconnection. Astrophys. J. 2017, 836, 24. [Google Scholar] [CrossRef]
- Ishak, A.; Nazar, R.; Pop, I. Falkner-Skan equation for flow past a moving wedge with suction or injection. J. Appl. Math. Comput. 2007, 25, 67–83. [Google Scholar] [CrossRef]
- Turkyilmazoglu, M. Slip flow and heat transfer over a specific wedge: An exactly solvable Falkner–Skan equation. J. Eng. Math. 2015, 92, 73–81. [Google Scholar] [CrossRef]
- Ding, X.; Gong-nan, X. Application of the Fixed Point Method to Solve the Nonlinear Falkner-Skan Flow Equation. Appl. Math. Mech. 2015, 36, 78–86. [Google Scholar]
- Madaki, A.; Abdulhameed, M.; Ali, M.; Roslan, R. Solution of the Falkner–Skan wedge flow by a revised optimal homotopy asymptotic method. SpringerPlus 2016, 5, 513. [Google Scholar] [CrossRef]
- Falkneb, V.; Skan, S.W. LXXXV. Solutions of the boundary-layer equations. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1931, 12, 865–896. [Google Scholar] [CrossRef]
- Quartapelle, L.; Rebay, S. Numerical solution of two-point boundary value problems. J. Comput. Phys. 1990, 86, 314–354. [Google Scholar] [CrossRef]
- Yacob, N.A.; Ishak, A.; Pop, I. Falkner–Skan problem for a static or moving wedge in nanofluids. Int. J. Therm. Sci. 2011, 50, 133–139. [Google Scholar] [CrossRef]
- Merkin, J. Mixed convection in a Falkner–Skan system. J. Eng. Math. 2016, 100, 167–185. [Google Scholar] [CrossRef][Green Version]
- Yacob, N.A.; Ishak, A.; Nazar, R.; Pop, I. Falkner–Skan problem for a static and moving wedge with prescribed surface heat flux in a nanofluid. Int. Commun. Heat Mass Transf. 2011, 38, 149–153. [Google Scholar] [CrossRef]
- Abbasbandy, S.; Naz, R.; Hayat, T.; Alsaedi, A. Numerical and analytical solutions for Falkner–Skan flow of MHD Maxwell fluid. Appl. Math. Comput. 2014, 242, 569–575. [Google Scholar] [CrossRef]
- Abbasbandy, S.; Hayat, T.; Alsaedi, A.; Rashidi, M. Numerical and analytical solutions for Falkner-Skan flow of MHD Oldroyd-B fluid. Int. J. Numer. Methods Heat Fluid Flow 2014, 24, 390–401. [Google Scholar] [CrossRef]
- Hartree, D.R. On an equation occurring in Falkner and Skan’s approximate treatment of the equations of the boundary layer. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 1937; Volume 33, pp. 223–239. [Google Scholar]
- Stewartson, K. On the flow between two rotating coaxial disks. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 1953; Volume 49, pp. 333–341. [Google Scholar]
- Brown, S. Hartree’s solutions of the Falkner-Skan equation. AIAA J. 1966, 4, 2215–2216. [Google Scholar] [CrossRef]
- Hastings, S. Existence for a Falkner-Skan type boundary value problem. J. Math. Anal. Appl. 1970, 31, 15–23. [Google Scholar] [CrossRef]
- Hastings, S. An existence theorem for a class of nonlinear boundary value problems including that of Falkner and Skan. J. Differ. Equ. 1971, 9, 580–590. [Google Scholar] [CrossRef]
- Cebeci, T.; Keller, H.B. Shooting and parallel shooting methods for solving the Falkner-Skan boundary-layer equation. J. Comput. Phys. 1971, 7, 289–300. [Google Scholar] [CrossRef]
- Summers, D. A random vortex simulation of Falkner-Skan boundary layer flow. J. Comput. Phys. 1989, 85, 86–103. [Google Scholar] [CrossRef]
- Asaithambi, A. A finite-difference method for the Falkner-Skan equation. Appl. Math. Comput. 1998, 92, 135–141. [Google Scholar] [CrossRef]
- Morgan, P.; Rubin, S.; Khosla, P. Application of the reduced Navier–Stokes methodology to flow stability of Falkner–Skan class flows. Comput. Fluids 1999, 28, 307–321. [Google Scholar] [CrossRef]
- Rosales-Vera, M.; Valencia, A. Solutions of Falkner–Skan equation with heat transfer by Fourier series. Int. Commun. Heat Mass Transf. 2010, 37, 761–765. [Google Scholar] [CrossRef]
- Abbasbandy, S.; Hayat, T. Solution of the MHD Falkner-Skan flow by homotopy analysis method. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 3591–3598. [Google Scholar] [CrossRef]
- Parand, K.; Dehghan, M.; Pirkhedri, A. The use of Sinc-collocation method for solving Falkner–Skan boundary-layer equation. Int. J. Numer. Methods Fluids 2012, 68, 36–47. [Google Scholar] [CrossRef]
- Abbasbandy, S.; Hayat, T.; Ghehsareh, H.R.; Alsaedi, A. MHD Falkner-Skan flow of Maxwell fluid by rational Chebyshev collocation method. Appl. Math. Mech. 2013, 34, 921–930. [Google Scholar] [CrossRef]
- Naseri, R.; Malek, A.; Van Gorder, R. On existence and multiplicity of similarity solutions to a nonlinear differential equation arising in magnetohydrodynamic Falkner–Skan flow for decelerated flows. Math. Methods Appl. Sci. 2015, 38, 4272–4278. [Google Scholar] [CrossRef]
- Farooq, U.; Zhao, Y.; Hayat, T.; Alsaedi, A.; Liao, S. Application of the HAM-based Mathematica package BVPh 2.0 on MHD Falkner–Skan flow of nano-fluid. Comput. Fluids 2015, 111, 69–75. [Google Scholar] [CrossRef]
- Raju, C.; Sandeep, N. Nonlinear radiative magnetohydrodynamic Falkner-Skan flow of Casson fluid over a wedge. Alex. Eng. J. 2016, 55, 2045–2054. [Google Scholar] [CrossRef]
- Afzal, N. Falkner–Skan equation for flow past a stretching surface with suction or blowing: Analytical solutions. Appl. Math. Comput. 2010, 217, 2724–2736. [Google Scholar] [CrossRef]
- Ahmad, S.; Nadeem, S.; Muhammad, N.; Issakhov, A. Radiative SWCNT and MWCNT nanofluid flow of Falkner–Skan problem with double stratification. Phys. A Stat. Mech. Its Appl. 2020, 547, 124054. [Google Scholar] [CrossRef]
- Ali, B.; Hussain, S.; Nie, Y.; Khan, S.A.; Naqvi, S.I.R. Finite element simulation of bioconvection Falkner–Skan flow of a Maxwell nanofluid fluid along with activation energy over a wedge. Phys. Scr. 2020, 95, 095214. [Google Scholar] [CrossRef]
- Belden, E.R.; Dickman, Z.A.; Weinstein, S.J.; Archibee, A.D.; Burroughs, E.; Barlow, N.S. Asymptotic approximant for the Falkner–Skan boundary layer equation. Q. J. Mech. Appl. Math. 2020, 73, 36–50. [Google Scholar] [CrossRef]
- Huang, W.; Jiang, T.; Zhang, X.; Khan, N.A.; Sulaiman, M. Analysis of Beam-Column Designs by Varying Axial Load with Internal Forces and Bending Rigidity Using a New Soft Computing Technique. Complexity 2021, 2021, 6639032. [Google Scholar] [CrossRef]
- Zhang, Y.; Lin, J.; Hu, Z.; Khan, N.A.; Sulaiman, M. Analysis of Third-Order Nonlinear Multi-Singular Emden–Fowler Equation by Using the LeNN-WOA-NM Algorithm. IEEE Access 2021, 9, 72111–72138. [Google Scholar] [CrossRef]
- Ahmad, A.; Sulaiman, M.; Aljohani, A.J.; Alhindi, A.; Alrabaiah, H. Design of an efficient algorithm for solution of Bratu differential equations. Ain Shams Eng. J. 2021, 12, 2211–2225. [Google Scholar] [CrossRef]
- Khan, N.A.; Khalaf, O.I.; Romero, C.A.T.; Sulaiman, M.; Bakar, M.A. Application of Euler Neural Networks with Soft Computing Paradigm to Solve Nonlinear Problems Arising in Heat Transfer. Entropy 2021, 23, 1053. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, A.; Sulaiman, M.; Kumam, P. Solutions of fractional order differential equations modeling temperature distribution in convective straight fins design. Adv. Differ. Equ. 2021, 2021, 382. [Google Scholar] [CrossRef]
- Ahmad, A.; Sulaiman, M.; Kumam, P.; Bakar, M.A. Analysis of a Mathematical Model for Drilling System with Reverse Air Circulation by Using the ANN-BHCS Technique. IEEE Access 2021, 9, 119188–119218. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Tavera Romero, C.A.; Alarfaj, F.K. Theoretical Analysis on Absorption of Carbon Dioxide (CO2) into Solutions of Phenyl Glycidyl Ether (PGE) Using Nonlinear Autoregressive Exogenous Neural Networks. Molecules 2021, 26, 6041. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Kumam, P.; Bakar, M.A. Thermal analysis of conductive-convective-radiative heat exchangers with temperature dependent thermal conductivity. IEEE Access 2021, 9, 138876–138902. [Google Scholar] [CrossRef]
- Ahmad, A.; Sulaiman, M.; Alhindi, A.; Aljohani, A.J. Analysis of Temperature Profiles in Longitudinal Fin Designs by a Novel Neuroevolutionary Approach. IEEE Access 2020, 8, 113285–113308. [Google Scholar] [CrossRef]
- Sulaiman, M.; Sulaman, M.; Hamdi, A.; Hussain, Z.H. The Plant Propagation Algorithm for the Optimal Operation of Directional Over-Current Relays in Electrical Engineering. Mehran Univ. Res. J. Eng. Technol. 2020, 39, 223–236. [Google Scholar] [CrossRef]
- Waseem, W.; Sulaiman, M.; Islam, S.; Kumam, P.; Nawaz, R.; Raja, M.A.Z.; Farooq, M.; Shoaib, M. A study of changes in temperature profile of porous fin model using cuckoo search algorithm. Alex. Eng. J. 2020, 59, 11–24. [Google Scholar] [CrossRef]
- Bukhari, A.H.; Sulaiman, M.; Islam, S.; Shoaib, M.; Kumam, P.; Raja, M.A.Z. Neuro-fuzzy modeling and prediction of summer precipitation with application to different meteorological stations. Alex. Eng. J. 2020, 59, 101–116. [Google Scholar] [CrossRef]
- Bukhari, A.H.; Raja, M.A.Z.; Sulaiman, M.; Islam, S.; Shoaib, M.; Kumam, P. Fractional neuro-sequential ARFIMA-LSTM for financial market forecasting. IEEE Access 2020, 8, 71326–71338. [Google Scholar] [CrossRef]
- Waseem, W.; Sulaiman, M.; Alhindi, A.; Alhakami, H. A Soft Computing Approach Based on Fractional Order DPSO Algorithm Designed to Solve the Corneal Model for Eye Surgery. IEEE Access 2020, 8, 61576–61592. [Google Scholar] [CrossRef]
- Ramírez-Ortegón, M.A.; Märgner, V.; Cuevas, E.; Rojas, R. An optimization for binarization methods by removing binary artifacts. Pattern Recognit. Lett. 2013, 34, 1299–1306. [Google Scholar] [CrossRef]
- El Sehiemy, R.; Abou El-Ela, A.; Shaheen, A. Multi-objective fuzzy-based procedure for enhancing reactive power management. IET Gener. Transm. Distrib. 2013, 7, 1453–1460. [Google Scholar] [CrossRef]
- Precup, R.E.; David, R.C.; Petriu, E.M.; Preitl, S.; Rădac, M.B. Fuzzy logic-based adaptive gravitational search algorithm for optimal tuning of fuzzy-controlled servo systems. IET Control Theory Appl. 2013, 7, 99–107. [Google Scholar] [CrossRef]
- Kazakov, A.L.; Lempert, A.A. On mathematical models for optimization problem of logistics infrastructure. Int. J. Artif. Intell. 2015, 13, 200–210. [Google Scholar]
- Lee, H.; Kang, I.S. Neural algorithm for solving differential equations. J. Comput. Phys. 1990, 91, 110–131. [Google Scholar] [CrossRef]
- Meade, A.J., Jr.; Fernandez, A.A. The numerical solution of linear ordinary differential equations by feedforward neural networks. Math. Comput. Model. 1994, 19, 1–25. [Google Scholar] [CrossRef]
- Meade, A.J., Jr.; Fernandez, A.A. Solution of nonlinear ordinary differential equations by feedforward neural networks. Math. Comput. Model. 1994, 20, 19–44. [Google Scholar] [CrossRef]
- Lagaris, I.E.; Likas, A.; Fotiadis, D.I. Artificial neural networks for solving ordinary and partial differential equations. IEEE Trans. Neural Netw. 1998, 9, 987–1000. [Google Scholar] [CrossRef]
- Jafarian, A.; Measoomy, S.; Abbasbandy, S. Artificial neural networks based modeling for solving Volterra integral equations system. Appl. Soft Comput. 2015, 27, 391–398. [Google Scholar] [CrossRef]
- Baymani, M.; Effati, S.; Niazmand, H.; Kerayechian, A. Artificial neural network method for solving the Navier–Stokes equations. Neural Comput. Appl. 2015, 26, 765–773. [Google Scholar] [CrossRef]
- Sabouri, J.; Effati, S.; Pakdaman, M. A neural network approach for solving a class of fractional optimal control problems. Neural Process. Lett. 2017, 45, 59–74. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Samar, R.; Haroon, T.; Shah, S.M. Unsupervised neural network model optimized with evolutionary computations for solving variants of nonlinear MHD Jeffery-Hamel problem. Appl. Math. Mech. 2015, 36, 1611–1638. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Khan, J.A.; Haroon, T. Stochastic numerical treatment for thin film flow of third grade fluid using unsupervised neural networks. J. Taiwan Inst. Chem. Eng. 2015, 48, 26–39. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Samar, R.; Manzar, M.A.; Shah, S.M. Design of unsupervised fractional neural network model optimized with interior point algorithm for solving Bagley–Torvik equation. Math. Comput. Simul. 2017, 132, 139–158. [Google Scholar] [CrossRef]
- Fang, J.; Liu, C.; Simos, T.; Famelis, I.T. Neural Network Solution of Single-Delay Differential Equations. Mediterr. J. Math. 2020, 17, 30. [Google Scholar] [CrossRef]
- Darbon, J.; Langlois, G.P.; Meng, T. Overcoming the curse of dimensionality for some Hamilton–Jacobi partial differential equations via neural network architectures. Res. Math. Sci. 2020, 7, 1–50. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Aljohani, A.J.; Kumam, P.; Alrabaiah, H. Analysis of multi-phase flow through porous media for imbibition phenomena by using the LeNN-WOA-NM algorithm. IEEE Access 2020, 8, 196425–196458. [Google Scholar] [CrossRef]
- Chen, Y.; Wan, J.W. Deep neural network framework based on backward stochastic differential equations for pricing and hedging american options in high dimensions. Quant. Financ. 2020, 21, 45–67. [Google Scholar] [CrossRef]
- Khan, N.A.; Sulaiman, M.; Kumam, P.; Aljohani, A.J. A new soft computing approach for studying the wire coating dynamics with Oldroyd 8-constant fluid. Phys. Fluids 2021, 33, 036117. [Google Scholar] [CrossRef]
- Avrutskiy, V.I. Neural networks catching up with finite differences in solving partial differential equations in higher dimensions. Neural Comput. Appl. 2020, 32, 13425–13440. [Google Scholar] [CrossRef]
- Blasius, H. The Boundary Layers in Fluids with Little Friction; Printed by BG Teubner; National Advisory Committee for Aeronautics: Washington, DC, USA, 1950; 57p.
- Hiemenz, K. The boundary layer on a straight circular cylinder immersed in the uniform flow of liquid. Dingler’s Polytech. J. 1911, 326, 321–324. [Google Scholar]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Reddy, K.S.; Panwar, L.K.; Panigrahi, B.; Kumar, R. A new binary variant of sine–cosine algorithm: Development and application to solve profit-based unit commitment problem. Arab. J. Sci. Eng. 2018, 43, 4041–4056. [Google Scholar] [CrossRef]
- Mirjalili, S.M.; Mirjalili, S.Z.; Saremi, S.; Mirjalili, S. Sine cosine algorithm: Theory, literature review, and application in designing bend photonic crystal waveguides. In Nature-Inspired Optimizers; Springer: Berlin/Heidelberg, Germany, 2020; pp. 201–217. [Google Scholar]
- Kuo, R.; Lin, J.Y.; Nguyen, T.P.Q. An application of sine cosine algorithm-based fuzzy possibilistic c-ordered means algorithm to cluster analysis. Soft Comput. 2020, 25, 3469–3484. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. A novel hybrid sine cosine algorithm for global optimization and its application to train multilayer perceptrons. Appl. Intell. 2020, 50, 993–1026. [Google Scholar] [CrossRef]
- Johansen, T.A.; Fossen, T.I.; Berge, S.P. Constrained nonlinear control allocation with singularity avoidance using sequential quadratic programming. IEEE Trans. Control Syst. Technol. 2004, 12, 211–216. [Google Scholar] [CrossRef]
- Fu, Z.; Liu, G.; Guo, L. Sequential quadratic programming method for nonlinear least squares estimation and its application. Math. Probl. Eng. 2019, 2019, 3087949. [Google Scholar] [CrossRef]
- Mehmood, A.; Zameer, A.; Ling, S.H.; ur Rehman, A.; Raja, M.A.Z. Integrated computational intelligent paradigm for nonlinear electric circuit models using neural networks, genetic algorithms and sequential quadratic programming. Neural Comput. Appl. 2020, 32, 10337–10357. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t | GA-ASM | ANN-SCA-SQP | GA-ASM | ANN-SCA-SQP | GA-ASM | ANN-SCA-SQP | GA-ASM | ANN-SCA-SQP |
|---|---|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | |||||
| 0 | ||||||||
| 0.1 | 0.005405388 | 0.005405935 | 0.00701195 | 0.007012223 | 0.008586938 | 0.008586741 | 0.011216733 | 0.011218571 |
| 0.2 | 0.021552704 | 0.021553204 | 0.027385678 | 0.027385963 | 0.033034377 | 0.033034394 | 0.042277563 | 0.042279561 |
| 0.3 | 0.048330482 | 0.048330938 | 0.060144874 | 0.060145167 | 0.071441575 | 0.071441658 | 0.089548039 | 0.089550157 |
| 0.4 | 0.085609334 | 0.085609743 | 0.104348531 | 0.104348845 | 0.122043285 | 0.12204328 | 0.149840904 | 0.149843023 |
| 0.5 | 0.133233738 | 0.1332341 | 0.159104966 | 0.159105304 | 0.183247294 | 0.183247067 | 0.220477782 | 0.220479818 |
| 0.6 | 0.191014645 | 0.191014961 | 0.223583479 | 0.223583826 | 0.253656044 | 0.253655481 | 0.299285991 | 0.299287959 |
| 0.7 | 0.25872314 | 0.258723423 | 0.297023781 | 0.297024106 | 0.332076339 | 0.332075319 | 0.384560326 | 0.384562273 |
| 0.8 | 0.336085496 | 0.336085755 | 0.378743274 | 0.378743557 | 0.417520623 | 0.417518995 | 0.475010319 | 0.475012229 |
| 0.9 | 0.422779921 | 0.422780154 | 0.468142379 | 0.468142625 | 0.509202753 | 0.509200337 | 0.56970587 | 0.569707661 |
| 1 | 0.518435328 | 0.51843553 | 0.564708054 | 0.564708269 | 0.606530566 | 0.606527172 | 0.66802863 | 0.668030264 |
| t | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MIN | MEAN | STD | MIN | MEAN | STD | MIN | MEAN | STD | MIN | MEAN | STD | |
| 0 | ||||||||||||
| 0.1 | ||||||||||||
| 0.2 | ||||||||||||
| 0.3 | ||||||||||||
| 0.4 | ||||||||||||
| 0.5 | ||||||||||||
| 0.6 | ||||||||||||
| 0.7 | ||||||||||||
| 0.8 | ||||||||||||
| 0.9 | ||||||||||||
| 1 | ||||||||||||
| t | GA-ASM | ANN-SCA-SQP | GA-ASM | ANN-SCA-SQP | GA-ASM | ANN-SCA-SQP | GA-ASM | ANN-SCA-SQP |
|---|---|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | |||||
| 0.922, 0.945, 0.871 0 | 0.100000003 | 0.10000286 | 0.400000001 | 0.40000002 | 0.700000002 | 0.70000006 | 1.000000002 | 1.00000916 |
| 0.1 | 0.107258688 | 0.10726099 | 0.408030229 | 0.40803026 | 0.708845878 | 0.7088459 | 1.009701424 | 1.00971087 |
| 0.922, 0.945, 0.871 0.2 | 0.12827934 | 0.12828114 | 0.431049908 | 0.43104994 | 0.733940924 | 0.73394093 | 1.036933177 | 1.03694284 |
| 0.3 | 0.161955186 | 0.16195656 | 0.467521105 | 0.46752114 | 0.773256408 | 0.77325642 | 1.079117187 | 1.07912697 |
| 0.922, 0.945, 0.871 0.4 | 0.207227704 | 0.2072287 | 0.516009591 | 0.51600963 | 0.824950845 | 0.82495083 | 1.133977968 | 1.13398776 |
| 0.5 | 0.263100533 | 0.26310118 | 0.575196183 | 0.57519622 | 0.88737351 | 0.88737345 | 1.199530471 | 1.19954018 |
| 0.922, 0.945, 0.871 0.6 | 0.32865057 | 0.32865088 | 0.643883848 | 0.64388387 | 0.959062703 | 0.95906263 | 1.274062714 | 1.27407226 |
| 0.7 | 0.403036431 | 0.40303644 | 0.721001173 | 0.72100119 | 1.038739877 | 1.03873981 | 1.356114951 | 1.35612425 |
| 0.922, 0.945, 0.871 0.8 | 0.485504502 | 0.48550426 | 0.805602746 | 0.80560276 | 1.125300632 | 1.12530058 | 1.444456808 | 1.44446581 |
| 0.9 | 0.575392805 | 0.57539238 | 0.896866986 | 0.89686699 | 1.217803468 | 1.21780345 | 1.53806357 | 1.53807222 |
| 0.922, 0.945, 0.871 1 | 0.672132912 | 0.67213233 | 0.994091896 | 0.99409188 | 1.315457047 | 1.31545705 | 1.636092513 | 1.63610078 |
| t | Case 1 | Case 2 | Case 3 | Case 4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MIN | MEAN | STD | MIN | MEAN | STD | MIN | MEAN | STD | MIN | MEAN | STD | |
| 0 | ||||||||||||
| 0.1 | ||||||||||||
| 0.2 | ||||||||||||
| 0.3 | ||||||||||||
| 0.4 | ||||||||||||
| 0.5 | ||||||||||||
| 0.6 | ||||||||||||
| 0.7 | ||||||||||||
| 0.8 | ||||||||||||
| 0.9 | ||||||||||||
| 1 | ||||||||||||
| t | GA-ASM | ANN-SCA-SQP | GA-ASM | ANN-SCA-SQP | GA-ASM | ANN-SCA-SQP |
|---|---|---|---|---|---|---|
| 0.886, 0.937, 0.855 | Case 1 | Case 2 | Case 3 | |||
| 0 | 0.00000000201791 | |||||
| 0.886, 0.937, 0.855 0.1 | 0.04453269581415 | 0.04453360804663 | 0.07238126197681 | 0.07238058398271 | 0.10000000050947 | 0.09999997846340 |
| 0.2 | 0.09759136204994 | 0.09759233310773 | 0.14920280312497 | 0.14920225200297 | 0.20000000004858 | 0.19999995379779 |
| 0.886, 0.937, 0.855 0.3 | 0.15840171232390 | 0.15840276011892 | 0.23000887771757 | 0.23000841060721 | 0.30000000060035 | 0.29999992810436 |
| 0.4 | 0.22624072485599 | 0.22624184509193 | 0.31438156183320 | 0.31438112523451 | 0.39999999987835 | 0.39999990191691 |
| 0.886, 0.937, 0.855 0.5 | 0.30044143682626 | 0.30044259729796 | 0.40194144929501 | 0.40194100409706 | 0.49999999785942 | 0.49999987338517 |
| 0.6 | 0.38039632386608 | 0.38039747408055 | 0.49234775039453 | 0.49234728211637 | 0.59999999685985 | 0.59999984254489 |
| 0.886, 0.937, 0.855 0.7 | 0.46555936972989 | 0.46556045397667 | 0.58529783585290 | 0.58529734522883 | 0.69999999814024 | 0.69999981035180 |
| 0.8 | 0.55544695545873 | 0.55544793048215 | 0.68052628070707 | 0.68052576767795 | 0.79999999993310 | 0.79999977481840 |
| 0.886, 0.937, 0.855 0.9 | 0.64963770195136 | 0.64963855179176 | 0.77780347991899 | 0.77780293432006 | 0.89999999991166 | 0.89999972856515 |
| 1 | 0.74777138206612 | 0.74777211254454 | 0.87693391214263 | 0.87693331575639 | 0.99999999945938 | 0.99999966257045 |
| t | Case 1 | Case 2 | Case 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| MIN | MEAN | STD | MIN | MEAN | STD | MIN | MEAN | STD | |
| 0 | |||||||||
| 0.1 | |||||||||
| 0.2 | |||||||||
| 0.3 | |||||||||
| 0.4 | |||||||||
| 0.5 | |||||||||
| 0.6 | |||||||||
| 0.7 | |||||||||
| 0.8 | |||||||||
| 0.9 | |||||||||
| 1 | |||||||||
| Problems | Cases | GMAD | GRMSE | GENSE | GFIT | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MIN | MEAN | STD | MIN | MEAN | STD | MIN | MEAN | STD | MIN | MEAN | STD | |||||
| 1 | 1 | |||||||||||||||
| 2 | ||||||||||||||||
| 3 | ||||||||||||||||
| 4 | 9.98 × 10−11 | 6.15 × 10−10 | 3.57 × 10−10 | |||||||||||||
| 2 | 1 | |||||||||||||||
| 2 | ||||||||||||||||
| 3 | ||||||||||||||||
| 4 | ||||||||||||||||
| 3 | 1 | |||||||||||||||
| 2 | ||||||||||||||||
| 3 | ||||||||||||||||
| Absolute Errors for Input Values | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Problem/Case | Population | |||||||||||
| 1 | 20 | |||||||||||
| 30 | ||||||||||||
| 40 | 0.000119 | |||||||||||
| 2 | 20 | 0.00011 | 0.000254 | 0.000447 | 0.000678 | 0.000931 | 0.001198 | 0.001482 | ||||
| 30 | ||||||||||||
| 40 | ||||||||||||
| 3 | 20 | |||||||||||
| 30 | 3.96 × 10−9 | |||||||||||
| 40 | 0.000119 | |||||||||||
| Absolute Errors for Input Values | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Problem/Case | No. of Neurons | |||||||||||
| 1 | 15 | |||||||||||
| 30 | 1.47 × 10−7 | |||||||||||
| 45 | 0.000937 | 0.044811 | 0.079813 | 0.10418 | 0.118043 | 0.121557 | 0.11491 | 0.098331 | 0.072095 | 0.036523 | 0.008015 | |
| 2 | 15 | 0.000133 | 0.000144 | 0.000149 | 0.000152 | 0.000155 | 0.000158 | 0.000158 | 0.000152 | 0.000138 | 0.000117 | |
| 30 | ||||||||||||
| 45 | ||||||||||||
| 3 | 15 | 0.000137 | 0.000203 | 0.000274 | 0.00035 | |||||||
| 30 | ||||||||||||
| 45 | ||||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, M.F.; Sulaiman, M.; Tavera Romero, C.A.; Alkhathlan, A. Falkner–Skan Flow with Stream-Wise Pressure Gradient and Transfer of Mass over a Dynamic Wall. Entropy 2021, 23, 1448. https://doi.org/10.3390/e23111448
Khan MF, Sulaiman M, Tavera Romero CA, Alkhathlan A. Falkner–Skan Flow with Stream-Wise Pressure Gradient and Transfer of Mass over a Dynamic Wall. Entropy. 2021; 23(11):1448. https://doi.org/10.3390/e23111448
Chicago/Turabian StyleKhan, Muhammad Fawad, Muhammad Sulaiman, Carlos Andrés Tavera Romero, and Ali Alkhathlan. 2021. "Falkner–Skan Flow with Stream-Wise Pressure Gradient and Transfer of Mass over a Dynamic Wall" Entropy 23, no. 11: 1448. https://doi.org/10.3390/e23111448
APA StyleKhan, M. F., Sulaiman, M., Tavera Romero, C. A., & Alkhathlan, A. (2021). Falkner–Skan Flow with Stream-Wise Pressure Gradient and Transfer of Mass over a Dynamic Wall. Entropy, 23(11), 1448. https://doi.org/10.3390/e23111448