Optimization for Software Implementation of Fractional Calculus Numerical Methods in an Embedded System


Abstract
:1. Introduction
2. Mathematical Preliminaries
3. Description of the Hardware Testing Platform
4. Implementation of the Grünwald–Letnikov Fractional-Order Operator
4.1. Memory Limitations
4.2. Compiler Settings
4.3. Measuring the Performance
- TRCENA bit [24] in the Debug Exception and Monitor Control Register (DEMCR) set to 1 to enable use of the trace and debug blocks.
- CYCCNTENA bit [0] in the DWT Control Register (DWT_CTRL) set to 1 to enable the CYCCNT counter.
- Value of the DWT_CYCCNT register initialized to 0.
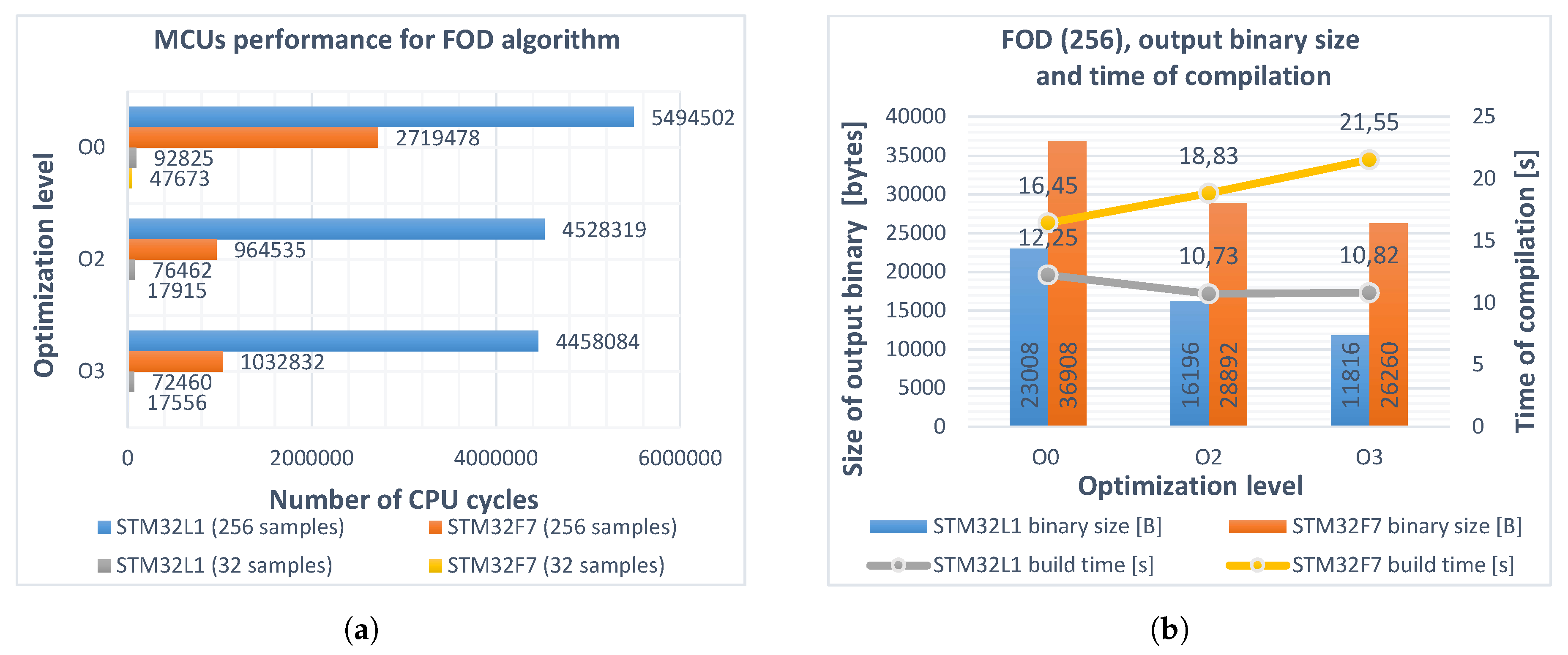
4.4. Implementation of Fractional-Order Backward Difference
5. Optimization
5.1. SIMD and DSP Instructions in the CMSIS Library
5.2. Enabling the Hardware Floating-Point Unit
5.3. Other Optimizations
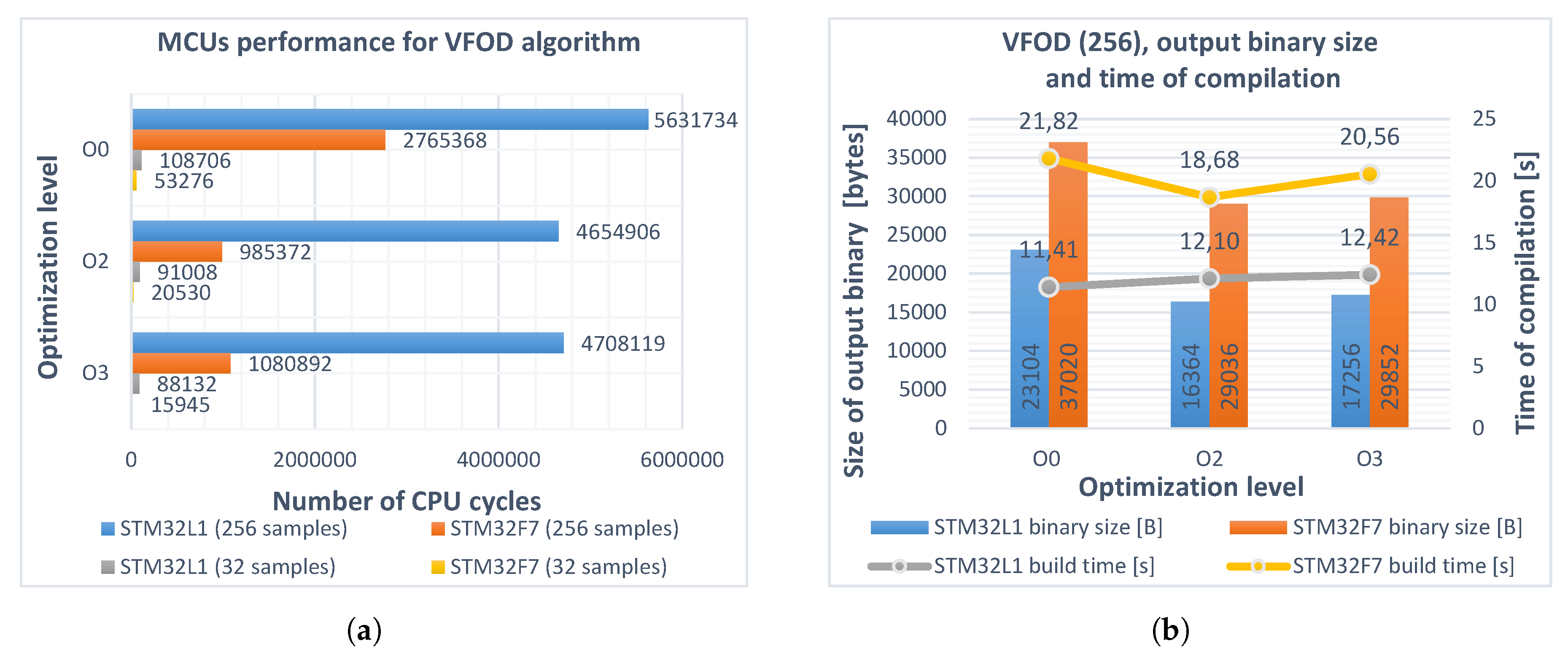
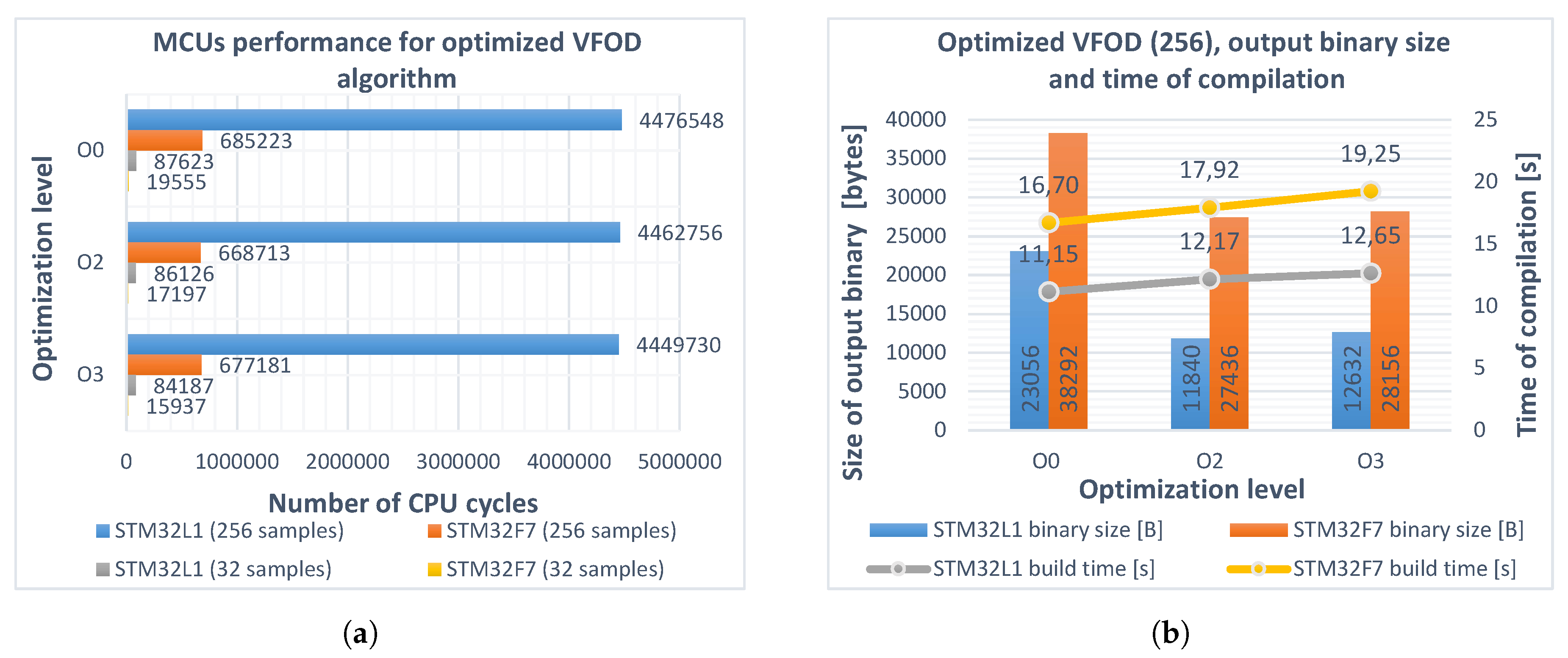
5.4. Implementation
- The appropriate linked CMSIS-DSP lib file: arm_cortexM3l_math.lib for STM32L152RCT6 (little-endian) and arm_cortexM7lfsp_math.lib for STM32F746ZG (little-endian, single-precision FPU). Required macros defined.
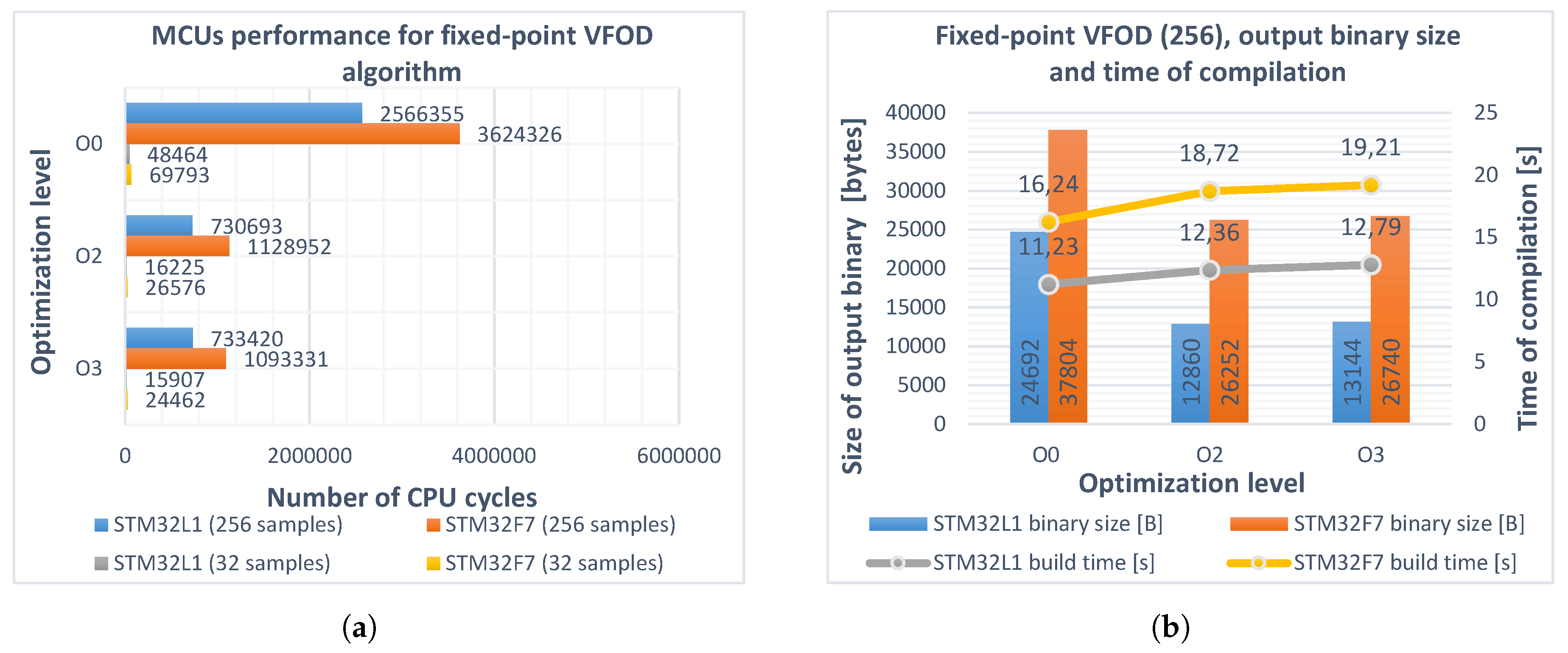
6. Fixed-Point Arithmetic
- The vector of the predefined floating-point input samples, initial fractional-order , and the sampling time h were converted to Q11.21 format by multiplying the values by and rounding to the nearest integer.
- The recursive function for calculating and fractional differintegral algorithm were modified for handling fixed-point arithmetic in Q11.21 notation.
- In the main loop, the order was incremented by one each step and the vectors of the coefficients, as well as the variable fractional-order backward difference and derivative responses, were recalculated.
7. Conclusions
Supplementary Materials
Funding
Conflicts of Interest
Abbreviations
| ABI | Application Binary Interface |
| CPACR | Coprocessor Access Control Register |
| DEMCR | Debug Exception and Monitor Control Register |
| DFT | Discrete Fourier Transform |
| DWT | Data Watchpoint and Trace unit |
| DWT_CTRL | DWT Control Register |
| DWT_CYCCNT | DWT Cycle Count Register |
| FIR | Finite Impulse Response |
| FPU | Floating-Point Unit |
| GL | Grünwald–Letnikov |
| IIR | Infinite Impulse Response |
| MAC | Multiply-Accumulate |
| PID | Proportional-Integral-Derivative Controller |
| SIMD | Single Instruction Multiple Data |
| (V)FOBD/S | (Variable) Fractional-Order Backward Difference/Sum |
| (V)FOD/I | (Variable) Fractional-Order Differintegral |
| (V)FOPID | (Variable) Fractional-Order Proportional-Integral-Derivative Controller |
References
- Oldham, K.B.; Spanier, J. The Fractional Calculus - Theory and Applications of Differentiation and Integration to Arbitrary Order. In Mathematics in Science and Engineering; Academic Press, Inc.: San Diego, CA, USA, 1974; Volume 111, ISBN 978-0-12-525550-9. [Google Scholar] [CrossRef]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations, 1st ed.; John Wiley & Sons: New York, NY, USA, 1993; ISBN 978-04-7158-884-9. [Google Scholar]
- Podlubny, I. Fractional Differential Equations—An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of their Solution and some of their Applications. In Mathematics in Science and Engineering; Academic Press, Inc.: San Diego, CA, USA, 1999; Volume 198, ISBN 978-01-2558-840-9. [Google Scholar] [CrossRef]
- Parsa Moghaddam, B.; Dabiri, A.; Tenreiro Machado, J.A. Application of variable-order fractional calculus in solid mechanics. In Handbook of Fractional Calculus with Applications. Applications in Engineering, Life and Social Sciences, Part A; Bǎleanu, D., Mendes Lopes, A., Tenreiro Machado, J.A., Eds.; De Gruyter: Berlin, Germany, 2019; Volume 7, pp. 207–224. ISBN 978-3-11-057091-5. [Google Scholar] [CrossRef]
- Sierociuk, D.; Skovranek, T.; Macias, M.; Podlubny, I.; Petras, I.; Dzielinski, A.; Ziubinski, P. Diffusion process modeling by using fractional-order models. Appl. Math. Comput. 2015, 257, 2–11. [Google Scholar] [CrossRef] [Green Version]
- MacDonald, C.L.; Bhattacharya, N.; Sprouse, B.P.; Silva, G.A. Efficient computation of the Grünwald–Letnikov fractional diffusion derivative using adaptive time step memory. J. Comput. Phys. 2015, 297, 221–236. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; He, S.; Yousefpour, A.; Jahanshahi, H.; Repnik, R.; Perc, M. Chaos and complexity in a fractional-order financial system with time delays. Chaos Solitons Fractals 2020, 131, 109521. [Google Scholar] [CrossRef]
- Tejado, I.; Pérez, E.; Valério, D. Fractional Derivatives for Economic Growth Modelling of the Group of Twenty: Application to Prediction. Mathematics 2020, 8, 50. [Google Scholar] [CrossRef] [Green Version]
- Sopasakis, P.; Sarimveis, H. Controlled Drug Administration by a Fractional PID. IFAC Proc. Vol. 2014, 47, 8421–8426. [Google Scholar] [CrossRef] [Green Version]
- Valentim, C.A.; Oliveira, N.A.; Rabi, J.A.; David, S.A. Can fractional calculus help improve tumor growth models? J. Comput. Appl. Math. 2020, 379, 112964. [Google Scholar] [CrossRef]
- Aliyu, A.I.; Alshomrani, A.S.; Li, Y.; Inc, M.; Baleanu, D. Existence theory and numerical simulation of HIV-I cure model with new fractional derivative possessing a non-singular kernel. Adv. Differ. Equ. 2019, 2019, 408. [Google Scholar] [CrossRef] [Green Version]
- Al-Shamasneh, A.R.; Jalab, H.A.; Shivakumara, P.; Ibrahim, R.W.; Obaidellah, U.H. Kidney segmentation in MR images using active contour model driven by fractional-based energy minimization. Signal Image Video Process. 2020, 1–8. [Google Scholar] [CrossRef]
- Lv, T.; Tong, L.; Zhang, J.; Chen, Y. A real-time physiological signal acquisition and analyzing method based on fractional calculus and stream computing. Soft Comput. 2020, 1–7. [Google Scholar] [CrossRef]
- Huang, L.L.; Park, J.H.; Wu, G.C.; Mo, Z.W. Variable-order fractional discrete-time recurrent neural networks. J. Comput. Appl. Math. 2020, 370, 112633. [Google Scholar] [CrossRef]
- Patnaik, S.; Hollkamp, J.P.; Semperlotti, F. Applications of variable-order fractional operators: A review. Proc. R. Soc. A Math. Phys. Eng. Sci. 2020, 476, 20190498. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Freeborn, T.J.; Maundy, B.; Elwakil, A.S. Fractional-order models of supercapacitors, batteries and fuel cells: A survey. Mater. Renew. Sustain. Energy 2015, 4, 9:1–9:7. [Google Scholar] [CrossRef] [Green Version]
- Lewandowski, M.; Orzyłowski, M. Fractional-order models: The case study of the supercapacitor capacitance measurement. Bull. Pol. Acad. Sci. Tech. Sci. 2017, 65, 449–457. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Li, Y.; Shang, Y.; Duan, B.; Cui, N.; Zhang, C. A Fractional-Order Kinetic Battery Model of Lithium-Ion Batteries Considering a Nonlinear Capacity. Electronics 2019, 8, 394. [Google Scholar] [CrossRef] [Green Version]
- Majka, L.; Klimas, M. Diagnostic approach in assessment of a ferroresonant circuit. Electr. Eng. 2019, 101, 149–164. [Google Scholar] [CrossRef] [Green Version]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.; HosseinNia, S.H.; Petlenkov, E. FOPID Controllers and Their Industrial Applications: A Survey of Recent Results. IFAC-PapersOnLine 2018, 51, 25–30. [Google Scholar] [CrossRef]
- Ostalczyk, P.; Brzezinski, D.; Duch, P.; Łaski, M.; Sankowski, D. The variable, fractional-order discrete-time PD controller in the IISv1.3 robot arm control. Cent. Eur. J. Phys. 2013, 11, 750–759. [Google Scholar] [CrossRef] [Green Version]
- El-Khazali, R. Fractional-order PIλDμ controller design. Comput. Math. Appl. 2013, 66, 639–646. [Google Scholar] [CrossRef]
- Petráš, I.; Vinagre, B.M. Practical application of digital fractional-order controller to temperature control. Acta Montan. Slovaca 2002, 7, 131–137. Available online: https://actamont.tuke.sk/pdf/2002/n2/11petras.pdf (accessed on 11 March 2020).
- Brzeziński, D.W. Fractional Order Derivative and Integral Computation with a Small Number of Discrete Input Values Using Grünwald–Letnikov Formula. Int. J. Comput. Methods 2019, 17, 1940006. [Google Scholar] [CrossRef]
- Scherer, R.; Kalla, S.L.; Tang, Y.; Huang, J. The Grünwald–Letnikov method for fractional differential equations. Comput. Math. Appl. 2011, 62, 902–917. [Google Scholar] [CrossRef] [Green Version]
- Ostalczyk, P. On simplified forms of the fractional-order backward difference and related fractional-order linear discrete-time system description. Bull. Pol. Acad. Sci. Tech. Sci. 2015, 63, 423–433. [Google Scholar] [CrossRef] [Green Version]
- Oustaloup, A. La commande CRONE: Commande Robuste D’Ordre non Entier; Hermes Science Publications: Paris, France, 1991; ISBN 978-28-6601-289-2. [Google Scholar]
- Oprzȩdkiewicz, K.; Podsiadło, M.; Dziedzic, K. Integer order vs fractional order temperature models in the forced air heating system. Przegla̧d Elektrotechniczny 2019, 95, 35–40. [Google Scholar] [CrossRef]
- Baranowski, J.; Bauer, W.; Zagórowska, M.; Pia̧tek, P. On Digital Realizations of Non-integer Order Filters. Circuits Syst. Signal Process. 2016, 35, 2083–2107. [Google Scholar] [CrossRef] [Green Version]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional-order Systems and Controls. Fundamentals and Applications; Advances in Industrial Control; Springer: London, UK, 2010; ISBN 978-1-84996-334-3. [Google Scholar] [CrossRef]
- Dastjerdi, A.A.; Vinagre, B.M.; Chen, Y.; HosseinNia, S.H. Linear fractional order controllers; A survey in the frequency domain. Annu. Rev. Control 2019, 47, 51–70. [Google Scholar] [CrossRef]
- Caponetto, R.; Machado, J.T.; Murgano, E.; Xibilia, M.G. Model Order Reduction: A Comparison between Integer and Non-Integer Order Systems Approaches. Entropy 2019, 21, 876. [Google Scholar] [CrossRef] [Green Version]
- Tepljakov, A.; Petlenkov, E.; Belikov, J. Implementation and real-time simulation of a fractional-order controller using a MATLAB based prototyping platform. In Proceedings of the 13th Biennial Baltic Electronics Conference, Tallinn, Estonia, 3–5 October 2012; pp. 145–148. [Google Scholar] [CrossRef]
- Pyeatt, L.D.; Ughetta, W. Non-Integral Mathematics. In Modern Assembly Language Programming with the ARM Processor; Pyeatt, L.D., Ughetta, W., Eds.; Elsevier: Amsterdam, The Netherlands, 2016; Chapter 8; pp. 239–292. ISBN 978-01-2819-221-4. [Google Scholar] [CrossRef]
- Ostalczyk, P. Discrete Fractional Calculus: Applications in Control and Image Processing; World Scientific Publishing Co., Inc.: Singapore, 2016; ISBN 978-98-1472-566-8. [Google Scholar]
- Mozyrska, D.; Ostalczyk, P. Variable-, fractional-order Grünwald-Letnikov backward difference selected properties. In Proceedings of the 39th International Conference on Telecommunications and Signal Processing (TSP 2016), Vienna, Austria, 27–29 June 2016; pp. 634–637. [Google Scholar] [CrossRef]
- STMicroelectronics. STM32L15xCC STM32L15xRC STM32L15xUC STM32L15xVC Ultra-low-power 32-bit MCU ARM-based Cortex-M3, 256KB Flash, 32KB SRAM, 8KB EEPROM, LCD, USB, ADC, DAC. Datasheet—Production Data. DocID022799 Rev 13. 2017. Available online: https://www.st.com/resource/en/datasheet/stm32l152rc.pdf (accessed on 11 March 2020).
- STMicroelectronics. STM32F745xx STM32F746xx ARM-based Cortex-M7 32b MCU+FPU, 462DMIPS up to 1MB Flash/320+16+4KB RAM, USB OTG HS/FS, ethernet, 18TIMs, 3ADCs, 25 com itf, cam & LCD Datasheet—Production Data. DocID027590 Rev 4. 2016. Available online: https://doi.org/https://www.st.com/resource/en/datasheet/stm32f746zg.pdf (accessed on 11 March 2020).
- STMicroelectronics. UM1079 User Manual. Discovery kits with STM32L152RCT6 and STM32L152RBT6 MCUs. 2017. Available online: http://www.st.com/resource/en/user_manual/dm00093903.pdf (accessed on 11 March 2020).
- STMicroelectronics. UM1974 User Manual STM32 Nucleo-144 Boards. 2017. Available online: http://www.st.com/content/ccc/resource/technical/document/user_manual/group0/26/49/90/2e/33/0d/4a/da/DM00244518/files/DM00244518.pdf/jcr:content/translations/en.DM00244518.pdf (accessed on 11 March 2020).
- Arm Ltd. Using Common Compiler Options. Selecting optimization options. In Arm® Compiler Version 6.12 User Guide; Arm Ltd.: Cambridge, UK, 2019; pp. 35–37. Available online: https://developer.arm.com/docs/100748/0612 (accessed on 11 March 2020).
- Arm Ltd. Data Watchpoint and Trace Unit. In Arm® Cortex®-M7 Processor Technical Reference Manual, r1p2 ed.; Arm Ltd.: Cambridge, UK, 2018; pp. 139–143. Available online: https://developer.arm.com/docs/ddi0489/d (accessed on 11 March 2020).
- Arm Ltd. CMSIS-Core (Cortex-M) Intrinsic Functions for SIMD Instructions [only Cortex-M4 and Cortex-M7]; Arm Ltd.: Cambridge, UK, 2019; Available online: https://www.keil.com/pack/doc/CMSIS/Core/html/group__intrinsic__SIMD__gr.html (accessed on 11 March 2020).
- Arm Ltd. CMSIS-DSP Software Library; Arm Ltd.: Cambridge, UK, 2019; Available online: https://www.keil.com/pack/doc/CMSIS/DSP/html/index.html (accessed on 11 March 2020).
- STMicroelectronics. AN4841 Application Note. Digital Signal Processing for STM32 Microcontrollers Using CMSIS. Rev 2. 2018. Available online: https://www.st.com/content/ccc/resource/technical/document/application_note/group0/c1/ee/18/7a/f9/45/45/3b/DM00273990/files/DM00273990.pdf/jcr:content/translations/en.DM00273990.pdf (accessed on 11 March 2020).
- ARM Ltd. Arm Cortex-M7 Processor Technical Reference Manual, r1p2 ed.; ARM Ltd.: Cambridge, UK, 2018; Available online: https://static.docs.arm.com/ddi0489/f/DDI0489F_cortex_m7_trm.pdf (accessed on 11 March 2020).
- Noronha, D.H.; Leong, P.H.; Wilton, S.J. Kibo: An Open-Source Fixed-Point Tool-kit for Training and Inference in FPGA-Based Deep Learning Networks. In Proceedings of the IEEE International Parallel and Distributed Processing Symposium Workshops (IPDPSW 2018), Vancouver, BC, Canada, 21–25 May 2018; pp. 178–185. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | STM32L152RCT6 (Arm® Cortex®-M3) | STM32F746ZG (Arm® Cortex®-M7) |
|---|---|---|
| CPU clock frequency () | up to 32 MHz | up to 216 MHz |
| Memory () | 256 KB Flash + 32 KB SRAM + 8 KB EEPROM | 1024 KB Flash + 320 KB SRAM |
| Converters () | 12-bit 1 MSPS ADC, 12-bit DAC | 3× 12-bit 2.4 MSPS ADC, 2× 12-bit DAC |
| Power supply () | 1.65–3.6 V | 1.8–3.6 V |
| Other features | ultra-low-power technology, LCD driver, touch sensor channels | floating-point unit real-time accelerator, DSP instructions, LCD and cam interface |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matusiak, M. Optimization for Software Implementation of Fractional Calculus Numerical Methods in an Embedded System. Entropy 2020, 22, 566. https://doi.org/10.3390/e22050566
Matusiak M. Optimization for Software Implementation of Fractional Calculus Numerical Methods in an Embedded System. Entropy. 2020; 22(5):566. https://doi.org/10.3390/e22050566
Chicago/Turabian StyleMatusiak, Mariusz. 2020. "Optimization for Software Implementation of Fractional Calculus Numerical Methods in an Embedded System" Entropy 22, no. 5: 566. https://doi.org/10.3390/e22050566
APA StyleMatusiak, M. (2020). Optimization for Software Implementation of Fractional Calculus Numerical Methods in an Embedded System. Entropy, 22(5), 566. https://doi.org/10.3390/e22050566