Comparison of the Probabilistic Ant Colony Optimization Algorithm and Some Iteration Method in Application for Solving the Inverse Problem on Model With the Caputo Type Fractional Derivative




Abstract
1. Introduction
2. Formulation of the Problem
- —spatial and time variable,
- u—function representing the temperature distribution,
- c—specific heat,
- —density,
- —thermal conductivity,
- —order of fractional derivative,
- g—additional heat source,
- f—function representing the initial condition,
- —functions representing the boundary condition of the first type.
Description of the Considered Inverse Problem
3. Methods of Solution
3.1. Solution of the Direct Problem
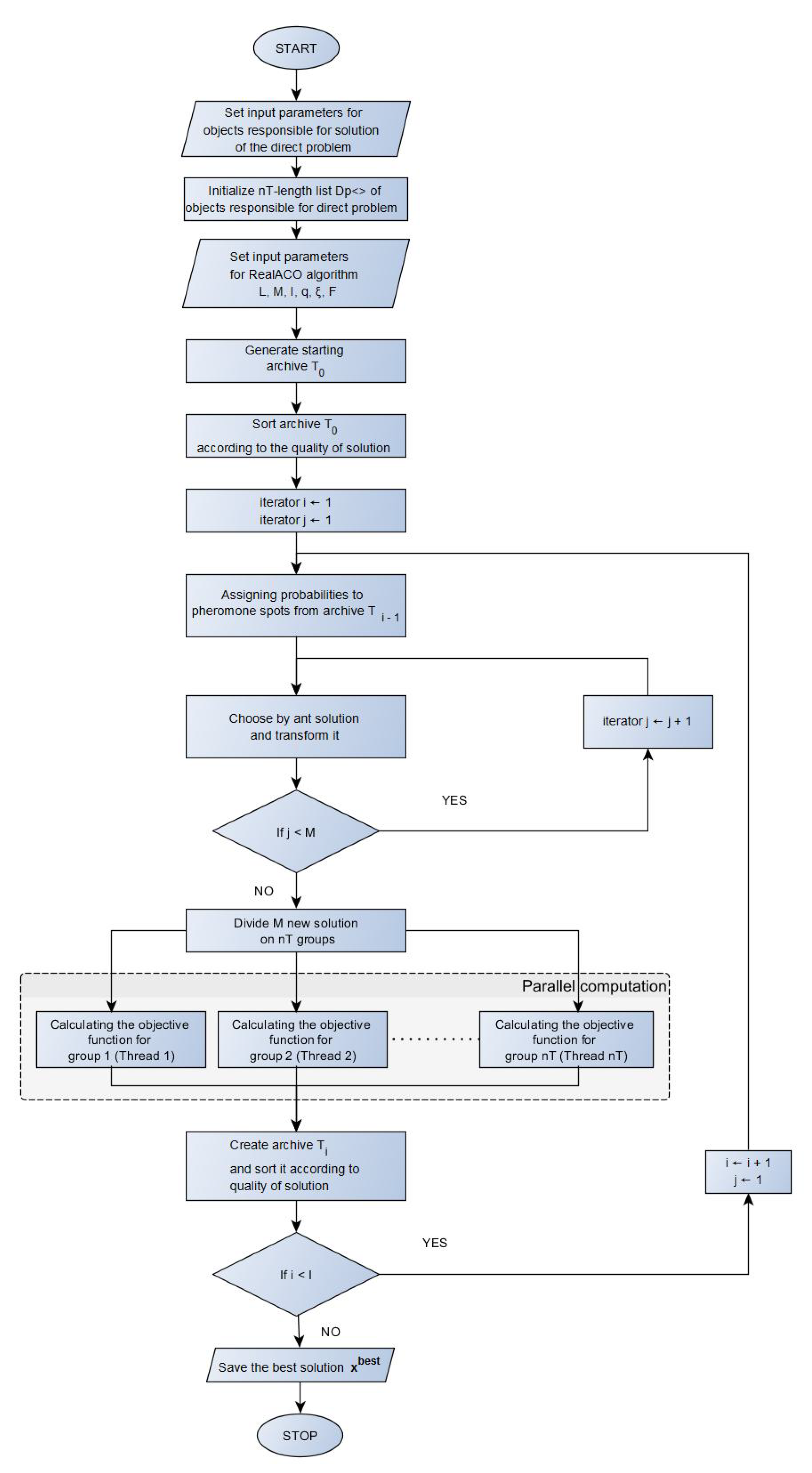
3.2. Solution of the Inverse Problem
- Setting the input parameters of the algorithm: .
- Generating L solutions playing the role of the pheromone spots. Assigning them to the set (initial archive).
- Computing the values of the objective function for all of the pheromone spots (parallel computing) and sorting the archive from the best solution to the worst.Iteration process
- Assigning the probabilities to the pheromone spots according to the pattern:where weights are related to the solution number l and are expressed by the formula:
- The ant randomly chooses the th solution with the probability .
- The ant transforms the j-th coordinate () of the th solution by sampling the neighborhood using the probability density function (in this case the Gauss function):where .
- Steps 5–6 are being repeated by every ant. We get M new solutions (pheromone spots) by that.
- Partition of the new solutions into the groups. Computing the value of the objective function for the new solutions (parallel computing).
- Adding the new solutions to the archive , sorting them by the quality and rejecting the M worst solutions.
- The steps 3–9 are being repeated I times.
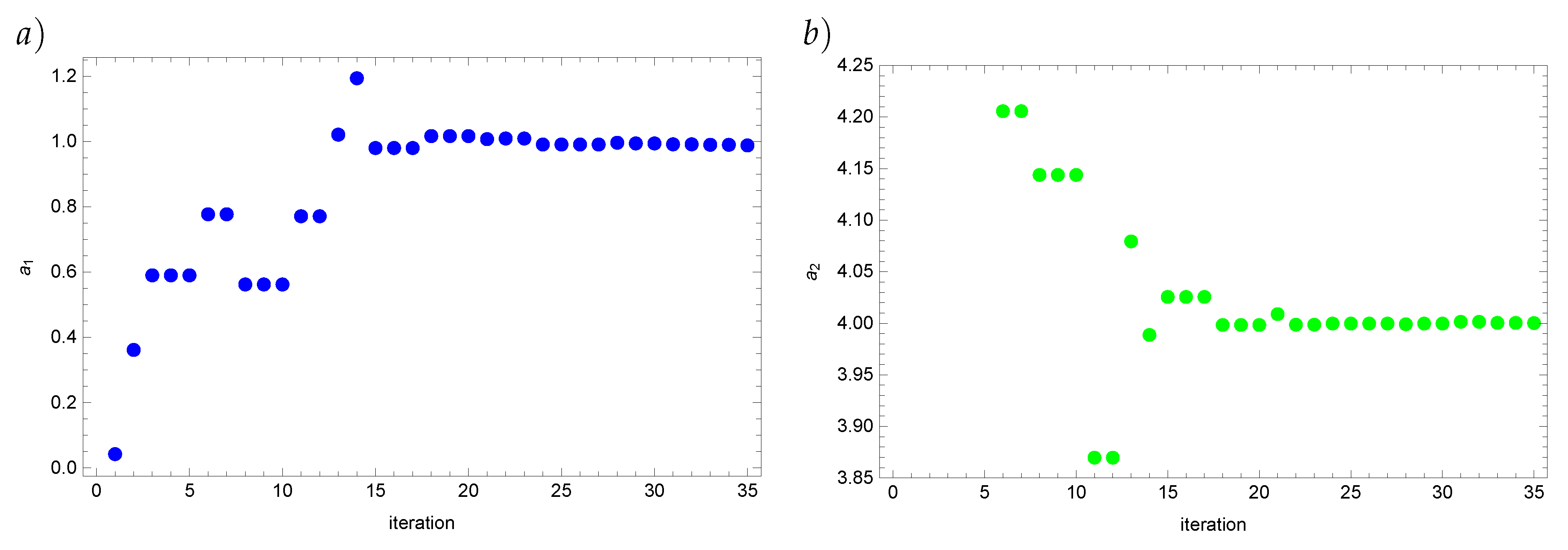
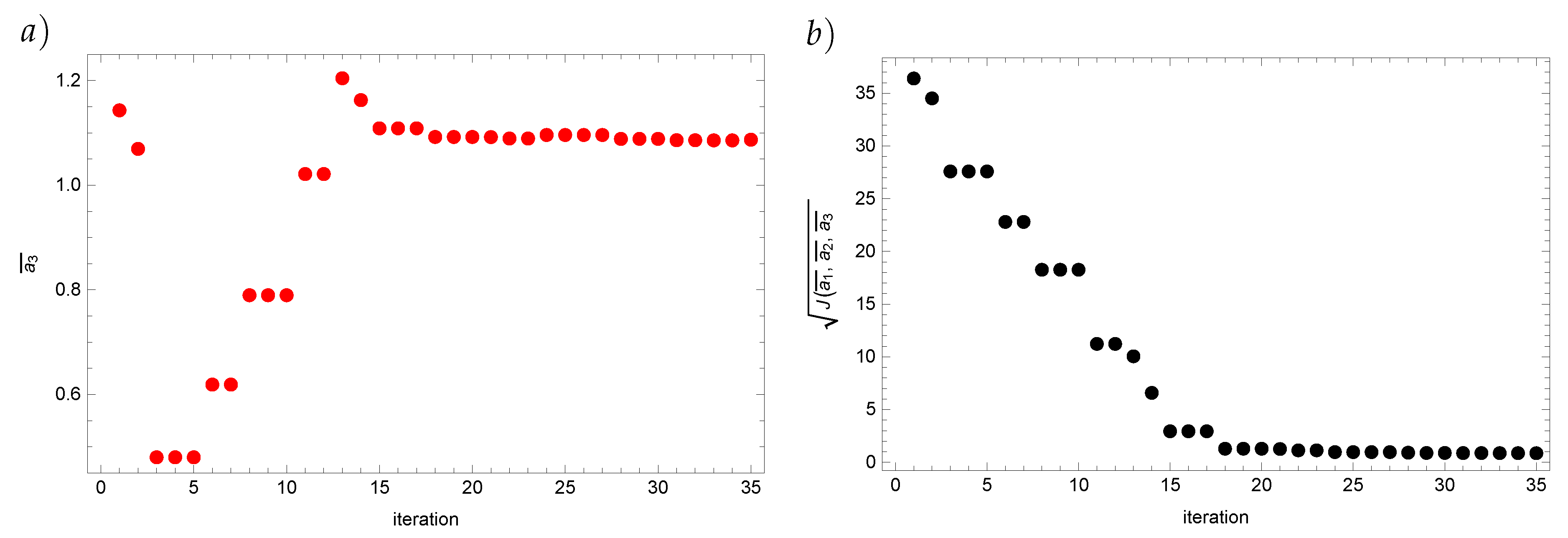
4. Numerical Examples
4.1. Example 1
4.2. Example 2
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mller, J.L.; Siltanen, S. Linear and Nonlinear Inverse Problems with Practical Applications; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2012. [Google Scholar]
- Vogel, C.R. Computational Methods for Inverse Problems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2002. [Google Scholar]
- Ortigueira, M.D.; Tenreiro Machado, J.A. What is a fractional derivative? J. Comput. Phys. 2015, 293, 4–13. [Google Scholar] [CrossRef]
- Miller, K.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Voller, V.R. Anomalous heat transfer: Examples, fundamentals, and fractional calculus models. Adv. Heat Transf. 2018, 50, 338–380. [Google Scholar]
- Zhuang, Q.; Yu, B.; Jiang, X. An inverse problem of parameter estimation for time-fractional heat conduction in a composite medium using carbon-carbon experimental data. Phys. B 2015, 456, 9–15. [Google Scholar] [CrossRef]
- Brociek, R.; Słota, D.; Krøl, M.; Matula, G.; Kwaśny, W. Comparison of mathematical models with fractional derivative for the heat conduction inverse problem based on the measurements of temperature in porous aluminum. Int. J. Heat Mass Transf. 2019, 143, 118440. [Google Scholar] [CrossRef]
- Yang, X.J.; Hristov, J.; Srivastava, H.M.; Ahmad, B. Modelling fractal waves on shallow water surfaces via local fractional Korteweg-de Vries equation. Abs. Appl. Anal. 2014, 278672. [Google Scholar] [CrossRef]
- Hristov, J. Approximate solutions to time-fractional models by integral-balance approach. Fract. Dyn. 2015, 78–109. [Google Scholar]
- Sowa, M. A harmonic balance methodology for circuits with fractional and nonlinear elements. Circuits Syst. Signal Process. 2018, 37, 4695–4727. [Google Scholar] [CrossRef]
- Oprzędkiewicz, K.; Mitkowski, W. A memory–efficient noninteger–order discrete–time state–space model of a heat transfer process. Int. J. Appl. Math. Comput. Sci. 2018, 28, 649–659. [Google Scholar] [CrossRef]
- Toufik, M.; Atangana, A. New numerical approximation of fractional derivative with non-local and non-singular kernel: Application to chaotic models. Eur. Phys. J. Plus 2017, 132, 444. [Google Scholar] [CrossRef]
- Yang, X.-J.; Tenreiro Machado, J.A. A new fractional operator of variable order: Application in the description of anomalous diffusion. Phys. A: Stat. Mech. Its Appl. 2017, 481, 276–283. [Google Scholar] [CrossRef]
- Koleva, M.N.; Vulkov, L.G. Numerical solution of time-fractional Black–Scholes equation. Comput. Appl. Math. 2017, 36, 1699–1715. [Google Scholar] [CrossRef]
- Murio, D.A. Implicit finite difference approximation for time fractional diffusion equations. Comput. Math. Appl. 2008, 56, 1138–1145. [Google Scholar] [CrossRef]
- Socha, K.; Dorigo, M. Ant colony optimization for continuous domains. Eur. J. Oper. Res. 2008, 185, 1155–1173. [Google Scholar] [CrossRef]
- Hetmaniok, E.; Słota, D.; Zielonka, A. Experimental veryfication of selected artificial intelligence algorithms used for solving the inverse Stefan problem. Numer. Heat Transf. Part B-Fundam. 2014, 66, 343–359. [Google Scholar] [CrossRef]
- Zhang, Z. An undetermined coefficient problem for a fractional diffusion equation. Inverse Probl. 2016, 32, 015011. [Google Scholar] [CrossRef]
- Baleanu, D.; Yang, X.J. Fractal heat conduction problem solved by local fractional variation iteration method. Therm. Sci. 2013, 17, 625–628. [Google Scholar]
- Brociek, R.; Słota, D.; Król, M.; Matula, G.; Kwaśny, W. Modeling of heat distribution in porous aluminum using fractional differential equation. Fractal Fract. 2017, 1, 17. [Google Scholar] [CrossRef]
- Voller, V.R. Computations of anomalous phase change. Int. J. Numer. Methods Heat Fluid Flow 2016, 26, 624–638. [Google Scholar] [CrossRef]
- Brociek, R.; Słota, D. Application of Real Ant Colony Optimization algorithm to solve space and time fractional heat conduction inverse problem. Inf. Technol. Control 2017, 46, 171–182. [Google Scholar] [CrossRef]
- Mavrovouniotis, M.; Li, C.; Yang, S. A survey of swarm intelligence for dynamic optimization: Algorithms and applications. Swarm Evol. Comput. 2017, 33, 1–17. [Google Scholar] [CrossRef]
- Gutjahr, W.J. ACO algorithms with guaranteed convergence to the optimal solution. Inf. Process. Lett. 2002, 82, 145–153. [Google Scholar] [CrossRef]
- Dorigo, M.; Blum, C. Ant colony optimization theory: A survey. Theor. Comput. Sci. 2005, 344, 243–278. [Google Scholar] [CrossRef]
- Duan, H. Ant colony optimization: Principle, convergence and application. In Handbook of Swarm Intelligence. Adaptation, Learning, and Optimization; Panigrahi, B.K., Shi, Y., Lim, M.-H., Eds.; Springer: Berlin, Germany, 2011; pp. 373–388. [Google Scholar]
- Chen, W.; Bian, W.; Zeng, R. Research on convergence of ACO subset algorithms. COMPEL: Int. J. Comput. Math. Electr. Electron. Eng. 2013, 32, 649–660. [Google Scholar] [CrossRef]
- Fainekos, G.E.; Giannakoglou, K.C. Inverse design of airfoils based on a novel formulation of the ant colony optimization method. Inverse Probl. Eng. 2003, 11, 21–38. [Google Scholar] [CrossRef]
- Carvalho, A.R.; de Campos Velho, H.F.; Stephany, S.; Souto, R.P.; Becceneri, J.C.; Sandri, S. Fuzzy ant colony optimization for estimating chlorophyll concentration profile in offshore sea water. Inverse Probl. Sci. Eng. 2008, 16, 705–715. [Google Scholar] [CrossRef]
- Lobato, F.S.; Steffen Jr, V.; Silva Neto, A.J. Estimation of space-dependent single scattering albedo in a radiative transfer problem using differential evolution. Inverse Probl. Sci. Eng. 2012, 20, 1043–1055. [Google Scholar] [CrossRef]
- Hetmaniok, E.; Hristov, J.; Słota, D.; Zielonka, A. Identification of the heat transfer coefficient in the two-dimensional model of binary alloy solidification. Heat Mass Transf. 2017, 53, 1657–1666. [Google Scholar] [CrossRef]
- Tam, J.H.; Ong, Z.C.; Ismail, Z.; Ang, B.C.; Khoo, S.Y.; Li, W.L. Inverse identification of elastic properties of composite materials using hybrid GA-ACO-PSO algorithm. Inverse Probl. Sci. Eng. 2018, 26, 1432–1463. [Google Scholar] [CrossRef]
- Kaipio, J.; Somersalo, E. Statistical and Computational Inverse Problems; Springer: New York, NY, USA, 2005. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Noise | |||
|---|---|---|---|
| Noise | RealACO | Iteration Method | |
|---|---|---|---|
| Error | Error | ||
| Noise | RealACO | Iteration Method | |
|---|---|---|---|
| Error | Error | ||
| Noise | |||
|---|---|---|---|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brociek, R.; Chmielowska, A.; Słota, D. Comparison of the Probabilistic Ant Colony Optimization Algorithm and Some Iteration Method in Application for Solving the Inverse Problem on Model With the Caputo Type Fractional Derivative. Entropy 2020, 22, 555. https://doi.org/10.3390/e22050555
Brociek R, Chmielowska A, Słota D. Comparison of the Probabilistic Ant Colony Optimization Algorithm and Some Iteration Method in Application for Solving the Inverse Problem on Model With the Caputo Type Fractional Derivative. Entropy. 2020; 22(5):555. https://doi.org/10.3390/e22050555
Chicago/Turabian StyleBrociek, Rafał, Agata Chmielowska, and Damian Słota. 2020. "Comparison of the Probabilistic Ant Colony Optimization Algorithm and Some Iteration Method in Application for Solving the Inverse Problem on Model With the Caputo Type Fractional Derivative" Entropy 22, no. 5: 555. https://doi.org/10.3390/e22050555
APA StyleBrociek, R., Chmielowska, A., & Słota, D. (2020). Comparison of the Probabilistic Ant Colony Optimization Algorithm and Some Iteration Method in Application for Solving the Inverse Problem on Model With the Caputo Type Fractional Derivative. Entropy, 22(5), 555. https://doi.org/10.3390/e22050555