Rapidly Tuning the PID Controller Based on the Regional Surrogate Model Technique in the UAV Formation


Abstract
1. Introduction
2. The UAV Formation Model
2.1. The Leader–Follower Structure
2.2. Outer-Loop-Controller Design
2.3. Performance Measures of the UAV Formation
- Steady-state value (): the stable value of the response curve, which is the direct aim of the controller.
- Overshoot (): the maximum peak value of the response curve measured from the desired response, which is given by [30]where is the peak value of the response curve beyond .
- Accommodation time (): the time at which the response curve enters a specific interval around the desired response and no longer exceed the specific interval.
3. The Regional Surrogate Model Technique Based on the Regional Information Entropy
3.1. Regional Information Entropy Analysis
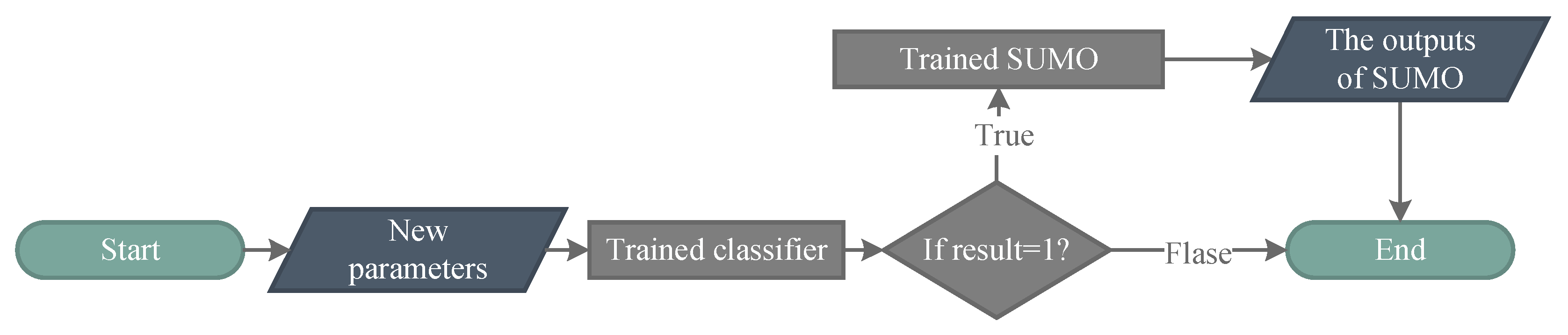
3.2. The Regional Surrogate Model Technique
| Algorithm 1 The regional surrogate model technique. |
Input: the number of initial samples N; the parameter space ; the criteria of the SOS. Output: A classifier; a regional SUMO Definition: the selected training set for the SUMO ; the training set for classifier 1: Make the initial sample selection from the and get N samples 2: Put selected samples into the simulation model to get their response 3: for each sample and its response 4: if i-th sample belongs to the SOS 5: add i-th sample and its response into ; 6: classify i-th sample with class 1; 7: add i-th sample and its class into ; 8: else 9: classify i-th sample with class 0; 10: add i-th sample and its class into 11: end if 12: end for 13: Train the SUMO by 14: Train the classifier by |
| Algorithm 2 Generating decision tree. |
Input:D: the training set; C: the attribute set. Output: A decision tree Function TreeGenerate 1: Create a node N 2: if tuples in D belong to only one class C then 3: label N as a leaf node with class C; return 4: end if 5: if C is empty OR the samples of D are of the same class then 6: set label N as the leaf node with the most common class in D; return 7: end if 8: Find the best splitting criterion from C 9: for each do 10: add a branch below N, corresponding to 11: is the subset of D with 12: if is empty then 13: label the branch node as the leaf node with the most common class in D; return 14: else 15: set TreeGenerate as the branch node 16: end if 17: end for |
4. Simulation and Results
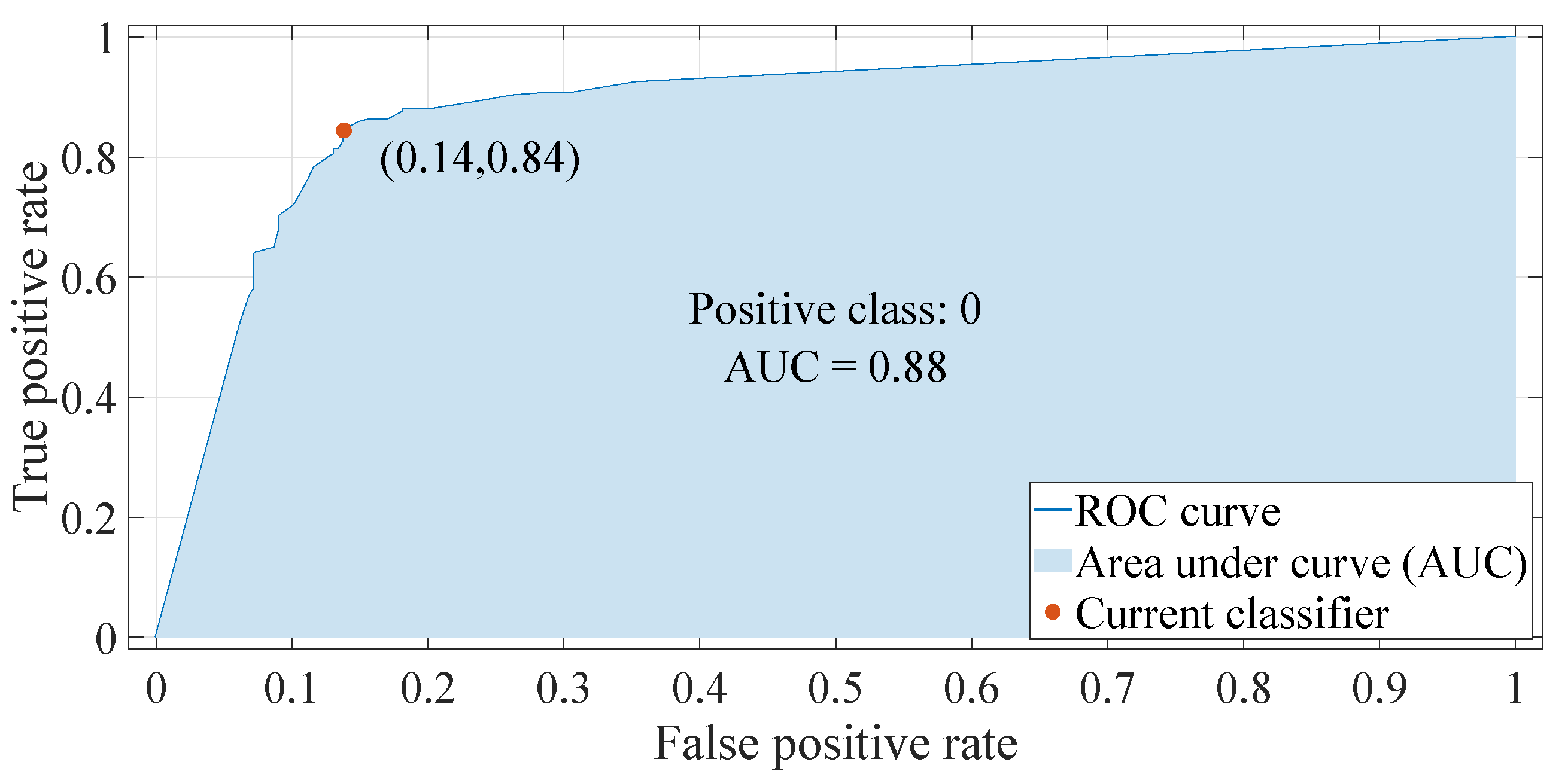
4.1. Evaluation Results for SUMOs Based on the RSMT
4.2. Tuning PID Controllers Through the RSMT
5. Conclusion and Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreciations
| GRNN | generalized regression neural network |
| L-F | leader–follower |
| LQR | linear quadratic regulator |
| SUMO | surrogate model |
| PCE | polynomial chaos expansions |
| PCK | polynomial chaos Kriging |
| probability distribution function | |
| TOPSIS | technique for order of preference by similarity to ideal solution |
| PID | proportional-integral-derivative |
| RMSE | root mean squared error |
| SOF | space of failure |
| SOS | space of success |
| RSMT | regional surrogate model technique |
| RBFNN | radial basis function neural network |
| UAV | unmanned aerial vehicle |
Appendix A. The Design of Single UAV
Appendix A.1. Inner-Loop Controller Design
Appendix A.2. The System Matrices of a Single UAV
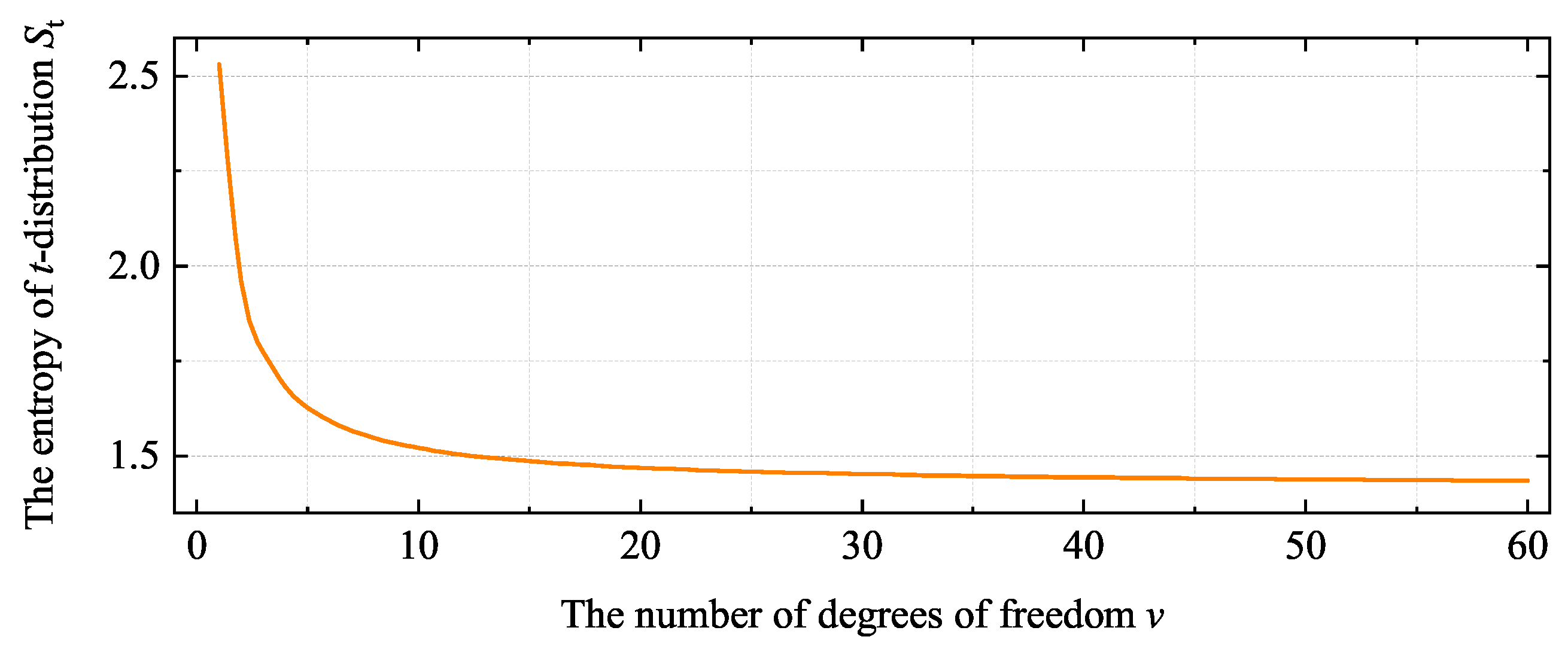
Appendix B. Regional Information Entropy Relationship in the Case of the t-Distribution

Appendix C. Brief Introduction to Kriging, PCE, PCK, the RBFNN, and the GRNN
Appendix C.1. Kriging
Appendix C.2. PCE
Appendix C.3. PCK
Appendix C.4. The RBFNN
Appendix C.5. The GRNN
References
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tut. 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Ang, K.H.; Chong, G.; Li, Y. PID control system analysis, design, and technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–576. [Google Scholar]
- López-Estrada, F.R.; Ponsart, J.C.; Theilliol, D.; Zhang, Y.; Astorga-Zaragoza, C.M. LPV model-based tracking control and robust sensor fault diagnosis for a quadrotor UAV. J. Intell. Robot. Syst. 2016, 84, 163–177. [Google Scholar] [CrossRef]
- Guzmán-Rabasa, J.A.; López-Estrada, F.R.; González-Contreras, B.M.; Valencia-Palomo, G.; Chadli, M.; Pérez-Patricio, M. Actuator fault detection and isolation on a quadrotor unmanned aerial vehicle modeled as a linear parameter-varying system. Meas. Control 2019, 52, 1228–1239. [Google Scholar] [CrossRef]
- Walter, V.; Staub, N.; Franchi, A.; Saska, M. Uvdar system for visual relative localization with application to leader–follower formations of multirotor uavs. IEEE Robot. Autom. Lett. 2019, 4, 2637–2644. [Google Scholar] [CrossRef]
- Guerrero-Sánchez, M.E.; Hernández-González, O.; Lozano, R.; García-Beltrán, C.D.; Valencia-Palomo, G.; López-Estrada, F.R. Energy-Based Control and LMI-Based Control for a Quadrotor Transporting a Payload. Mathematics 2019, 7, 1090. [Google Scholar] [CrossRef]
- Song, Y.; Cheng, Q.S.; Koziel, S. Multi-Fidelity Local Surrogate Model for Computationally Efficient Microwave Component Design Optimization. Sensors 2019, 19, 3023. [Google Scholar] [CrossRef]
- Kudinov, Y.; Kolesnikov, V.; Pashchenko, F.; Pashchenko, A.; Papic, L. Optimization of fuzzy PID controller’s parameters. Procedia Comput. Sci. 2017, 103, 618–622. [Google Scholar] [CrossRef]
- Kleijnen, J.P.C. Regression and Kriging metamodels with their experimental designs in simulation: A review. Eur. J. Oper. Res. 2017, 256, 1–16. [Google Scholar] [CrossRef]
- Sudret, B. Global sensitivity analysis using polynomial chaos expansions. Reliab. Eng. Syst. Saf. 2008, 93, 964–979. [Google Scholar] [CrossRef]
- Kersaudy, P.; Sudret, B.; Varsier, N.; Picon, O.; Wiart, J. A new surrogate modeling technique combining Kriging and polynomial chaos expansions—Application to uncertainty analysis in computational dosimetry. J. Comput. Phys. 2015, 286, 103–117. [Google Scholar] [CrossRef]
- Li, X.; Gong, C.; Gu, L.; Gao, W.; Jing, Z.; Su, H. A sequential surrogate method for reliability analysis based on radial basis function. Struct. Saf. 2018, 73, 42–53. [Google Scholar] [CrossRef]
- Park, J.; Kim, K. Meta-modeling using generalized regression neural network and particle swarm optimization. Appl. Soft Comput. 2017, 51, 354–369. [Google Scholar] [CrossRef]
- Son, S.H.; Choi, B.L.; Jin, W.J.; Lee, Y.G.; Kim, C.W.; Choi, D.H. Wing design optimization for a long-endurance UAV using FSI analysis and the Kriging method. Int. J. Aeronaut. Space Sci. 2016, 17, 423–431. [Google Scholar] [CrossRef]
- Joo, H.; Hwang, H.Y. Surrogate Aerodynamic Model for Initial Sizing of Solar High-Altitude Long-Endurance UAV. J. Aerosp. Eng. 2017, 30, 04017064. [Google Scholar] [CrossRef]
- Zhe, Z.; Guo, H.; Ma, J. Aerodynamic layout optimization design of a barrel-launched UAV wing considering control capability of multiple control surfaces. Aerosp. Sci. Technol. 2019, 93, 105297. [Google Scholar] [CrossRef]
- Ali, M.M.; Abdullah, S.; Osman, D. Controllers optimization for a fluid mixing system using metamodeling approach. Int. J. Simul. Model 2009, 8, 48–59. [Google Scholar]
- Ab Malek, M.; Ali, M. Evolutionary tuning method for PID controller parameters of a cruise control system using metamodeling. Model. Simul. Eng. 2009, 2009, 234529. [Google Scholar] [CrossRef]
- Faruq, A.; Abdullah, S.S.B.; Shah, M.F.N. Optimization of an intelligent controller for an unmanned underwater vehicle. Telkomnika 2011, 9, 245. [Google Scholar] [CrossRef]
- Lü, W.; Zhu, Y.; Huang, D.; Jiang, Y.; Jin, Y. A new strategy of integrated control and on-line optimization on high-purity distillation process. Chin. J. Chem. Eng. 2010, 18, 66–79. [Google Scholar] [CrossRef]
- Matinnejad, R.; Nejati, S.; Briand, L.; Brcukmann, T. MiL testing of highly configurable continuous controllers: Scalable search using surrogate models. In Proceedings of the 29th ACM/IEEE international conference on Automated software engineering, Västerås, Sweden, 15–19 September 2014; pp. 163–174. [Google Scholar]
- Pan, I.; Das, S. Kriging based surrogate modeling for fractional order control of microgrids. IEEE Trans. Smart Grid 2014, 6, 36–44. [Google Scholar] [CrossRef]
- Guerrero, J.; Cominetti, A.; Pralits, J.; Villa, D. Surrogate-based optimization using an open-source framework: The bulbous bow shape optimization case. Math. Comput. Appl. 2018, 23, 60. [Google Scholar] [CrossRef]
- Faruq, A.; Shah, M.F.N.; Abdullah, S.S. Multi-objective optimization of PID controller using pareto-based surrogate modeling algorithm for MIMO evaporator system. Int. J. Electr. Comput. Eng. 2018, 8, 556–565. [Google Scholar] [CrossRef]
- Xu, Q.; Yang, H.; Jiang, B.; Zhou, D.; Zhang, Y. Fault tolerant formations control of UAVs subject to permanent and intermittent faults. Intell. Robot. Syst. 2014, 73, 589–602. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Liu, S.; Deng, X. Adaptive Differential Evolution-based Receding Horizon Control Design for Multi-UAV Formation Reconfiguration. Int. J. Control Autom. Syst. 2019, 17, 3009–3020. [Google Scholar] [CrossRef]
- Park, C.; Cho, N.; Lee, K.; Kim, Y. Formation flight of multiple uavs via onboard sensor information sharing. Sensors 2015, 15, 17397–17419. [Google Scholar] [CrossRef]
- Li, P.; Yu, X.; Peng, X.; Zheng, Z.; Zhang, Y. Fault-tolerant cooperative control for multiple UAVs based on sliding mode techniques. Sci. China-Inf. Sci. 2017, 60, 070204. [Google Scholar] [CrossRef]
- Shamsuzzoha, M.; Skogestad, S. The setpoint overshoot method: A simple and fast closed-loop approach for PID tuning. J. Process Control 2010, 20, 1220–1234. [Google Scholar] [CrossRef]
- Pan, I.; Goncalves, G.; Batchvarov, A.; Liu, Y.; Liu, Y.; Sathasivam, V.; Yiakoumi, N.; Mason, L.; Matar, O. Active learning methodologies for surrogate model development in CFD applications. Bull. Am. Phys. Soc. 2019, 64. [Google Scholar] [CrossRef]
- Kim, S.W.; Melby, J.A.; Nadal-Caraballo, N.C.; Ratcliff, J. A time-dependent surrogate model for storm surge prediction based on an artificial neural network using high-fidelity synthetic hurricane modeling. Nat. Hazards 2015, 76, 565–585. [Google Scholar] [CrossRef]
- Zischg, A.P.; Felder, G.; Mosimann, M.; Röthlisberger, V.; Weingartner, R. Extending coupled hydrological- hydraulic model chains with a surrogate model for the estimation of flood losses. Environ. Modell. Softw. 2018, 108, 174–185. [Google Scholar] [CrossRef]
- Oladyshkin, S.; Nowak, W. The Connection between Bayesian Inference and Information Theory for Model Selection, Information Gain and Experimental Design. Entropy 2019, 21, 1081. [Google Scholar] [CrossRef]
- Hu, Y.J.; Ku, T.H.; Jan, R.H.; Wang, K.; Tseng, Y.C.; Yang, S.F. Decision tree-based learning to predict patient controlled analgesia consumption and readjustment. BMC Med. Inform. Decis. Mak. 2012, 12, 131. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Chowdhury, S.; Messac, A. An adaptive hybrid surrogate model. Struct. Multidiscip. Optim. 2012, 46, 223–238. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Hong, S.K. Completion of collision avoidance control algorithm for multicopters based on geometrical constraints. IEEE Access 2018, 6, 27111–27126. [Google Scholar] [CrossRef]
- Behzadian, M.; Otaghsara, S.K.; Yazdani, M.; Ignatius, J. A state-of the-art survey of TOPSIS applications. Expert Syst. Appl. 2012, 39, 13051–13069. [Google Scholar] [CrossRef]
- Li, Y.; Chen, C.; Chen, W. Research on longitudinal control algorithm for flying wing UAV based on LQR technology. Int. J. Smart Sens. Intell. Syst. 2013, 6, 2155–2181. [Google Scholar] [CrossRef]
- Rahimi, M.R.; Hajighasemi, S.; Sanaei, D. Designing and simulation for vertical moving control of UAV system using PID, LQR and Fuzzy Logic. Int. J. Elec. Comput. Eng. 2013, 3, 651. [Google Scholar]
- Student’s t-Distribution. Available online: https://wikivisually.com/wiki/Student%27s_t-distribution (accessed on 4 May 2020).
- Marelli, S.; Sudret, B. UQLab: A Framework for Uncertainty Quantification in Matlab. In Vulnerability, Uncertainty, and Risk; American Society of Civil Engineers: Reston, VA, USA, 2014; pp. 2554–2563. [Google Scholar]
- Nguyen, N.P.; Hong, S.K. Fault-tolerant control of quadcopter UAVs using robust adaptive sliding mode approach. Energies 2019, 12, 95. [Google Scholar] [CrossRef]
- Wang, Y.; Yin, D.Q.; Yang, S.; Sun, G. Global and local surrogate-assisted differential evolution for expensive constrained optimization problems with inequality constraints. IEEE Trans. Cybern. 2018, 49, 1642–1656. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| K | Classification Accuracy (%) | Time (s) | Kriging | PCE | PCK | GRNN | RBFNN |
|---|---|---|---|---|---|---|---|
| 85 | 350.7 | 8.3 | 12.3 | 7.7 | 21.0 | 14.9 | |
| null | 437.6 | ||||||
| 85 | 317.9 | 11.4 | 16.2 | 16.3 | 20.8 | 26.6 | |
| null | 289.6 | ||||||
| 84.6 | 318.3 | 8.6 | 9.2 | 8.9 | 14.2 | 29.4 | |
| null | 567.7 | ||||||
| 81.8 | 307.4 | 7.4 | 9.4 | 8.1 | 11.5 | 16.5 | |
| null | 322.5 | ||||||
| 79 | 111.5 | 7.7 | 8.6 | 7.4 | 12.2 | 12.3 | |
| null | 312.3 | ||||||
| 80.2 | 88.5 | 7.4 | 8.7 | 8.5 | 12.1 | 11.4 | |
| null | 356.4 |
| K | |||||||
|---|---|---|---|---|---|---|---|
| 0.41 | 0.59 | 9.36 | 0.39 | 24.06 | |||
| 0.44 | 0.56 | 9.13 | 0.19 | 47.66 | |||
| 0.45 | 0.55 | 9.04 | 0.11 | 81.68 | |||
| 0.51 | 0.49 | 8.59 | 0.06 | 134.23 | |||
| 0.59 | 0.41 | 8.15 | 0.03 | 234.94 | |||
| 0.76 | 0.24 | 7.74 | 0.01 | 533.58 |
| Kriging | 5.41 | 19.82 | 16.80 | 26.59 | |
| PCE | 5.65 | 21.52 | 17.28 | 32.23 | |
| PCK | 5.84 | 17.77 | 19.51 | 31.25 | |
| GRNN | 15.15 | 65.43 | 15.74 | 28.88 | |
| RBFNN | 18.84 | 37.34 | 37.33 | 155.45 |
| Function Name | Gamultiobj | Paretosearch |
|---|---|---|
| Number of solutions | 70 | 60 |
| Regional Kriging time (s) | ||
| Simulation model time (s) |
| Score () | Source | ||||||
|---|---|---|---|---|---|---|---|
| 0.300 | 0.0001 | 0.300 | 0.291 | 0.164 | 0.145 | 2.295 | regional Kriging |
| 0.191 | 0.0001 | 0.300 | 0.290 | 0.0001 | 0.300 | 2.286 | regional Kriging |
| 0.211 | 0.042 | 0.173 | 0.089 | 0.136 | 0.286 | 1.324 | simulation model |
| 0.019 | 0.0001 | 0.131 | 0.122 | 0.0009 | 0.131 | 1.286 | simulation model |
| 0.300 | 0.132 | 0.263 | 0.254 | 0.0009 | 0.263 | 1.121 | simulation model |
| 0.299 | 0.014 | 0.070 | 0.117 | 0.300 | 0.145 | 0.898 | regional Kriging |
| 0.299 | 0.014 | 0.300 | 0.117 | 0.300 | 0.145 | 0.789 | regional Kriging |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Duan, X.; Yan, L.; Deng, J.; Chen, J. Rapidly Tuning the PID Controller Based on the Regional Surrogate Model Technique in the UAV Formation. Entropy 2020, 22, 527. https://doi.org/10.3390/e22050527
Wang B, Duan X, Yan L, Deng J, Chen J. Rapidly Tuning the PID Controller Based on the Regional Surrogate Model Technique in the UAV Formation. Entropy. 2020; 22(5):527. https://doi.org/10.3390/e22050527
Chicago/Turabian StyleWang, Binglin, Xiaojun Duan, Liang Yan, Juan Deng, and Jiangtao Chen. 2020. "Rapidly Tuning the PID Controller Based on the Regional Surrogate Model Technique in the UAV Formation" Entropy 22, no. 5: 527. https://doi.org/10.3390/e22050527
APA StyleWang, B., Duan, X., Yan, L., Deng, J., & Chen, J. (2020). Rapidly Tuning the PID Controller Based on the Regional Surrogate Model Technique in the UAV Formation. Entropy, 22(5), 527. https://doi.org/10.3390/e22050527