Rope Tension Fault Diagnosis in Hoisting Systems Based on Vibration Signals Using EEMD, Improved Permutation Entropy, and PSO-SVM


Abstract
1. Introduction
2. Theoretical Basis
2.1. EEMD and the Proposed Sensitivity Index to Extract the Main IMFs
- Extract the local maxima and minima of .
- Interpolate the maxima and minima by cubic spline lines to determine the upper envelope and lower envelope , respectively.
- Calculate the mean value .
- Let , if is an IMF then let , else regard as and go back to step 1.
- Define the residue .
- Regard as , and repeat the above steps n times, until the residue is a monotone function or smaller than the threshold.
- Add white noise to the original signal.
- Decompose the noise-added signal IMFs by the EMD method.
- Repeat steps 1 and 2 with different white noises each time.
- Calculate the ensemble mean value of each IMF as the final IMF.
2.2. Permutation Entropy
- Sequence reconstruction. The time series is converted into a multi-dimensional vector:where m is the embedding dimension and is the delay factor.
- Sorting. Each sequence in the embedding vector is rearranged in ascending order as: , where . If two or more elements are equal, they are ordered by their corresponding index value . The rank is the permutation of , marked as an ordinal pattern . There are in total m! possible ordinal patterns.
- Probability and entropy calculation. The relative frequency of is calculated as:The PE is defined as:
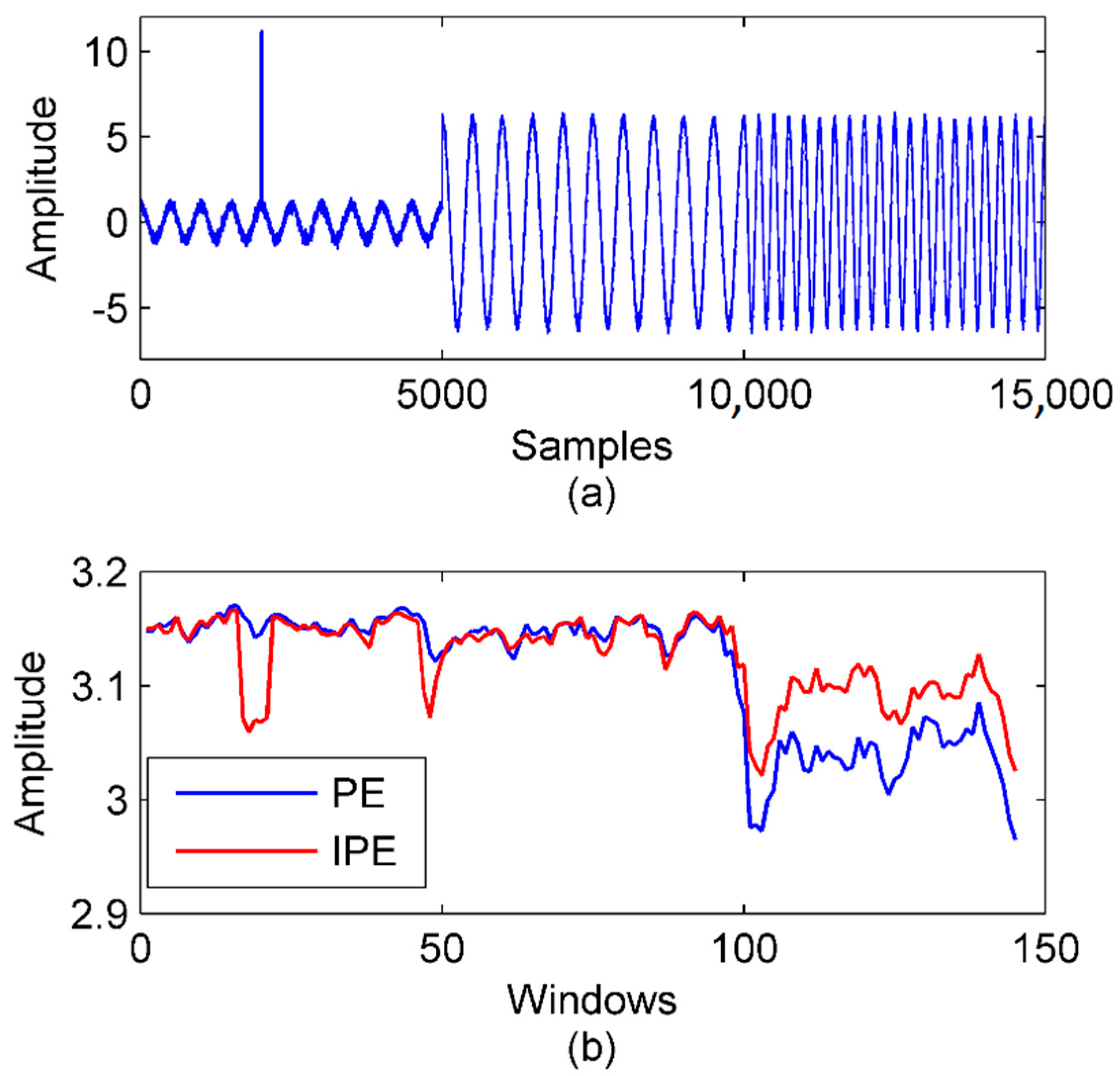
2.3. Improved Permutation Entropy
2.4. PSO-SVM
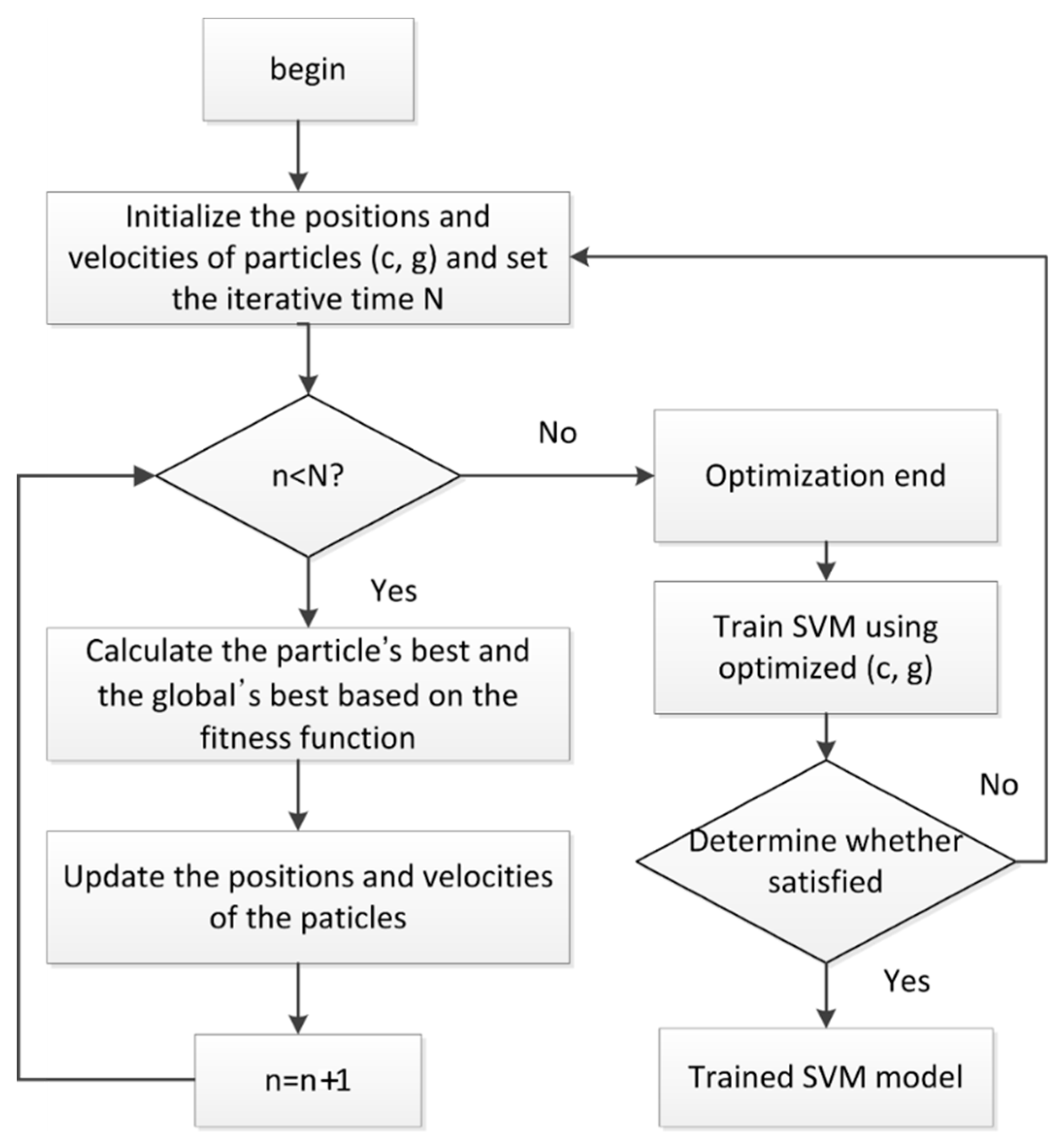
- Initialize the particles (c, g) and the iterative time N.
- Calculate the objective function value of the particle using the SVM training algorithm.
- Calculate the optimal historical values of the individual and the population.
- Update the particle velocity and position according to the speed and position update equations.
- If the iterative time is satisfied, output the optimal parameters; otherwise, go back to step 3.
- If the SVM accuracy does not meet the requirement, go back to step 1.
- The flowchart of the PSO-SVM is shown in Figure 3.
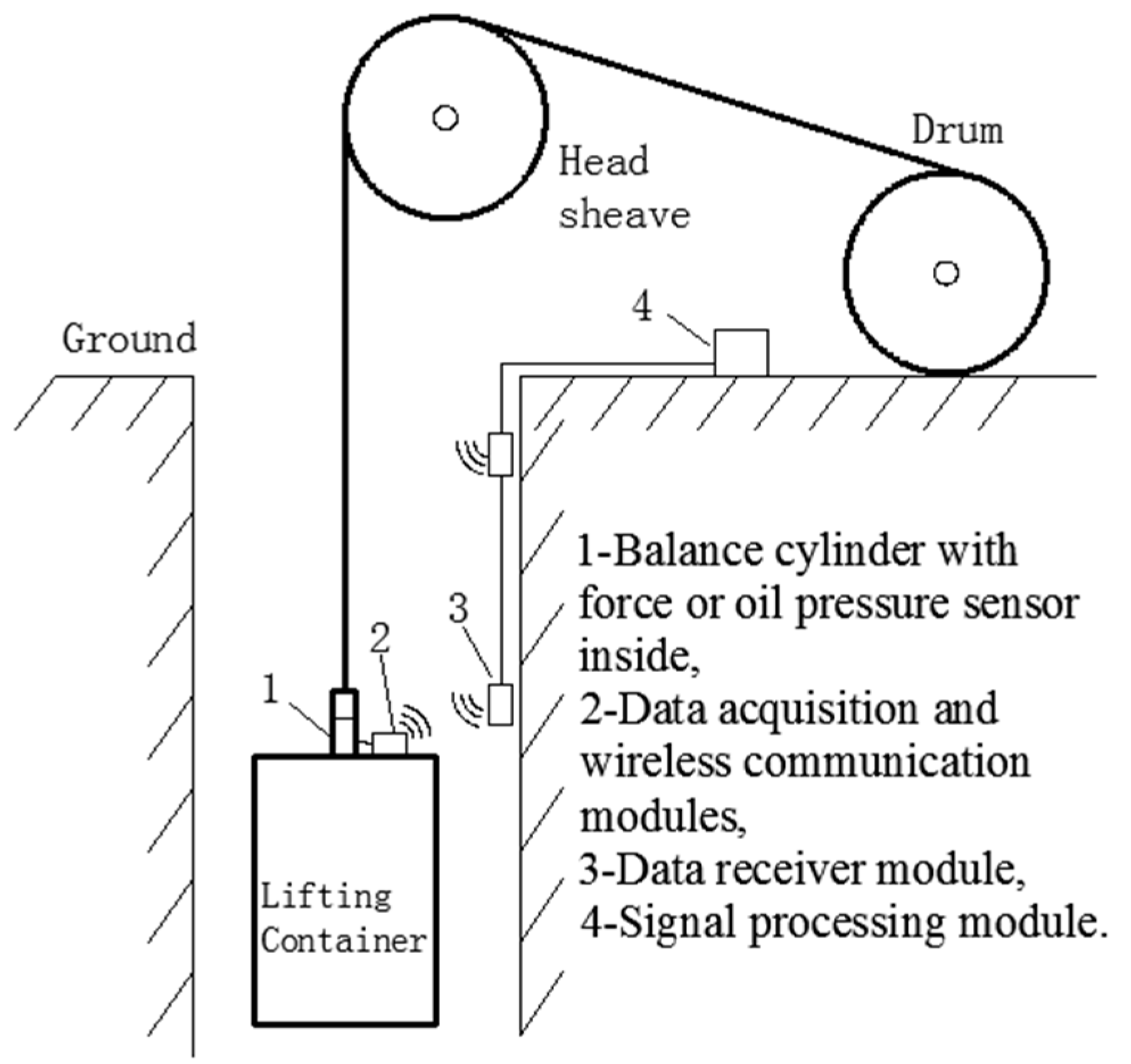
2.5. Relationship Between Rope Vibration and Tension
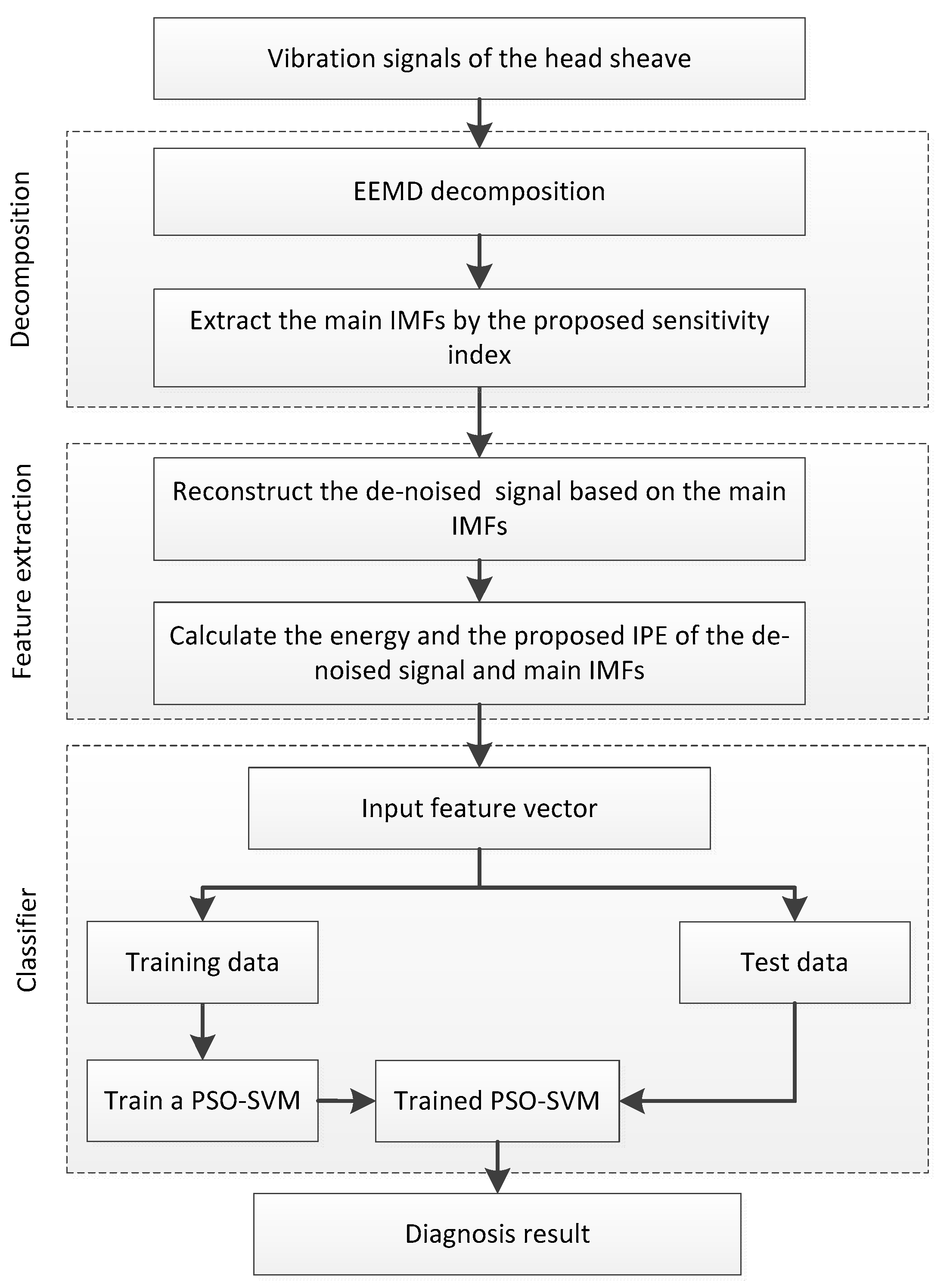
2.6. Proposed Method
- Decompose the transverse vibration signal of the head sheave into IMFs by the EEMD method.
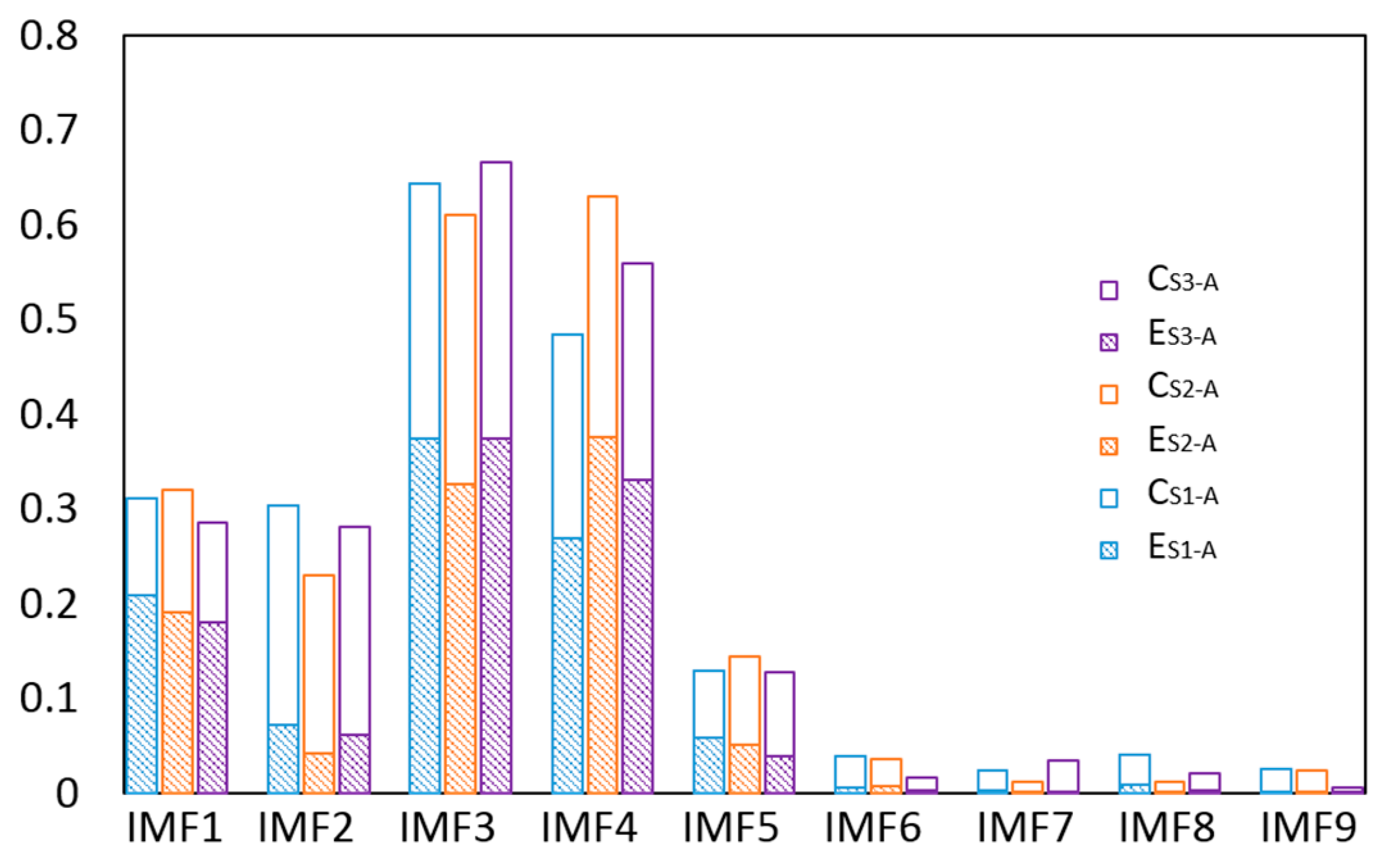
- Calculate the proposed sensitivity index of the IMFs and sort the values in descending order; then, extract the top j IMFs as the main IMFs and reconstruct the de-noised signal by the sum of the main IMFs.
- Calculate the energy and the IPE of the main IMFs and the de-noised signal to create the feature vector.
- Train the PSO-SVM model based on the vibration samples in different tension states.
- Use the trained SVM model to diagnose the rope tension faults in the hoisting systems in practice.
3. Experiment Results and Discussion
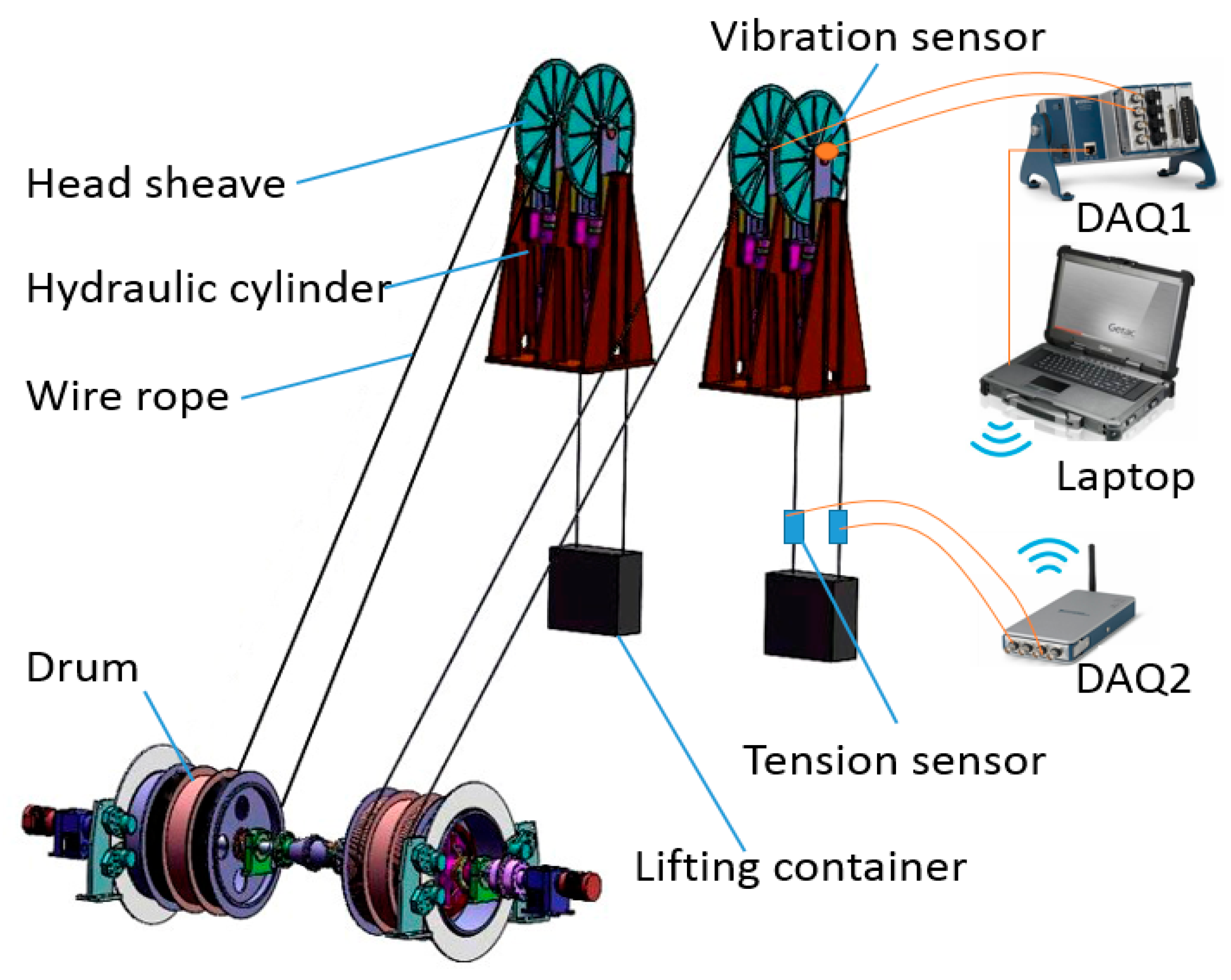
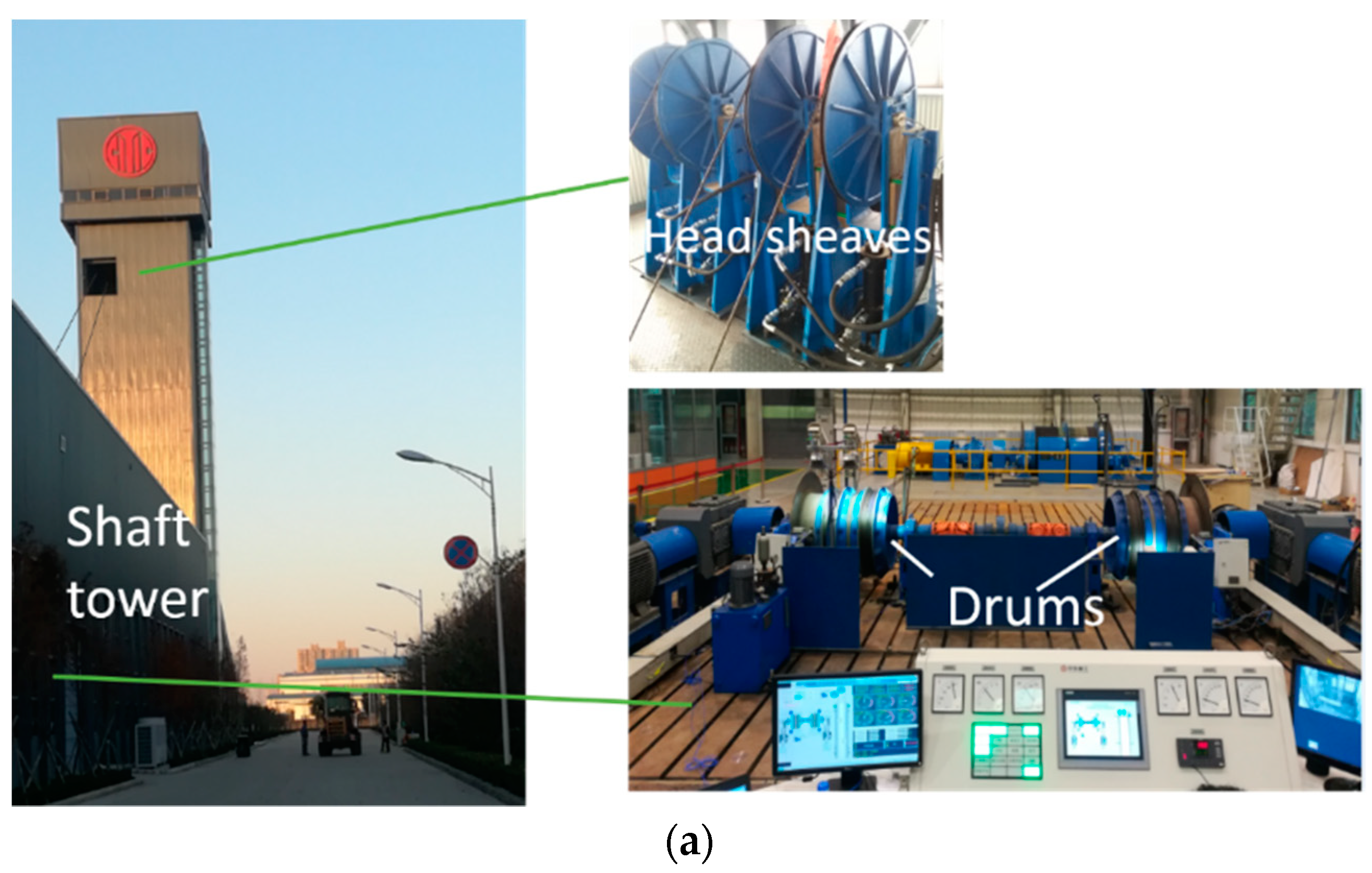
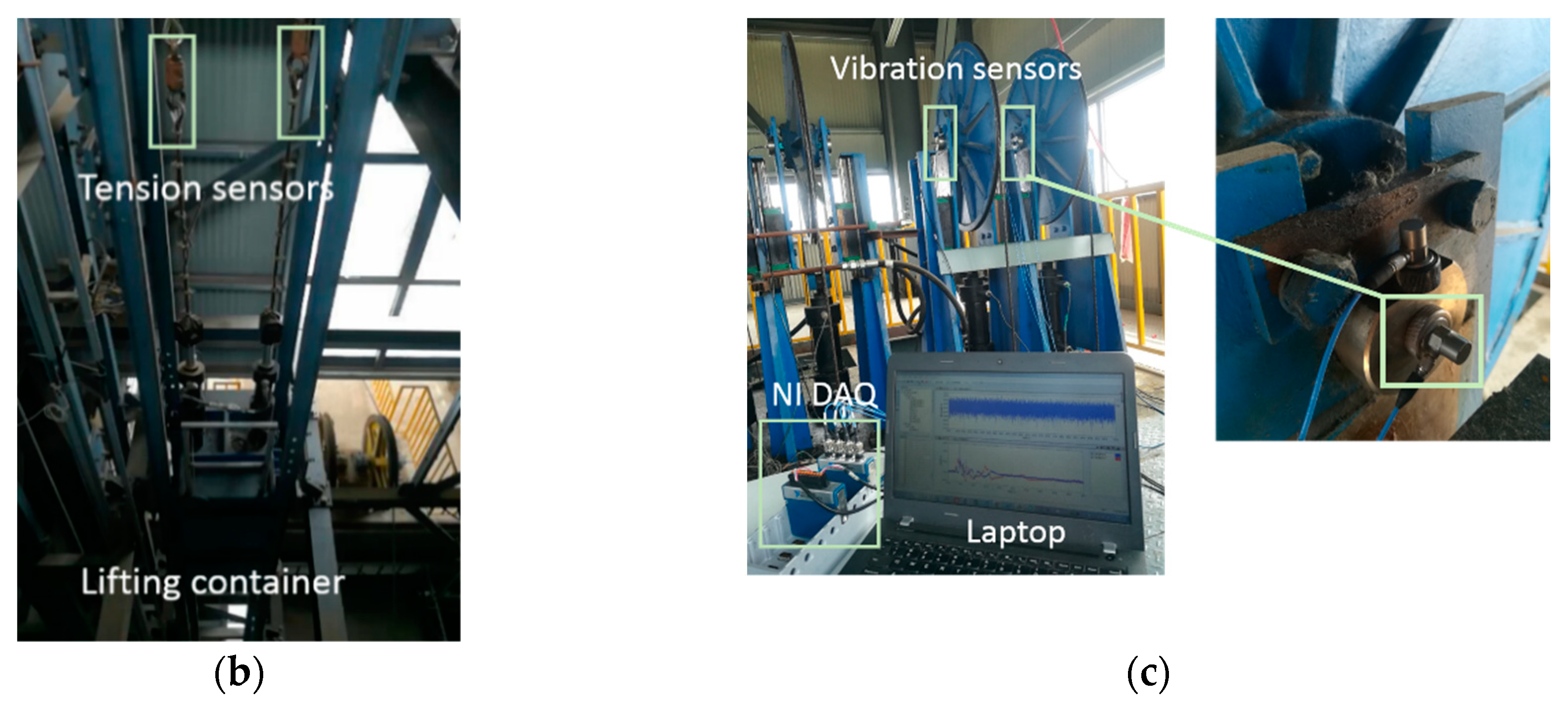
3.1. Experimental Setting and Data Collection
3.2. Experiment 1: Classification of the Three States of a Single Rope
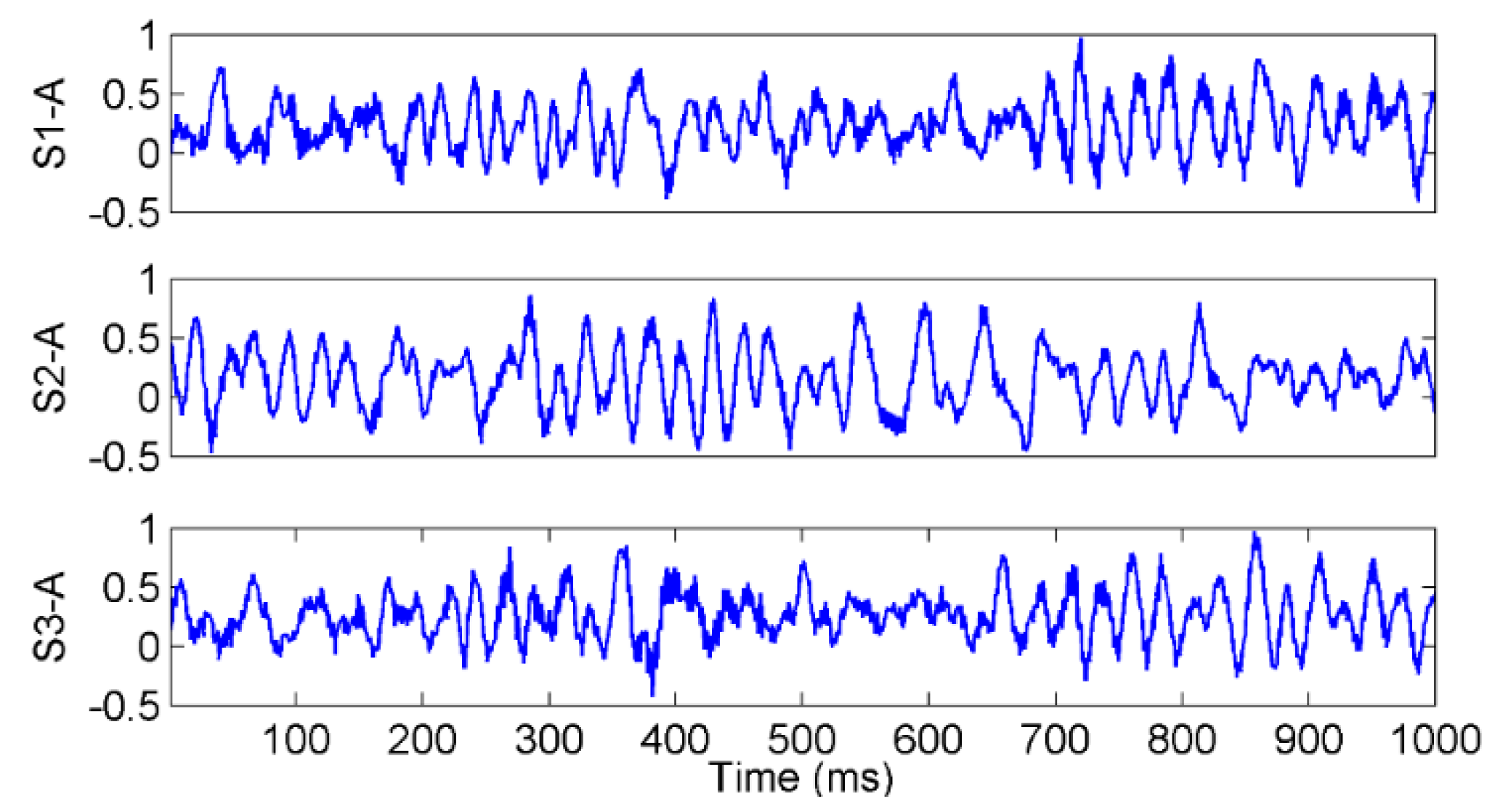
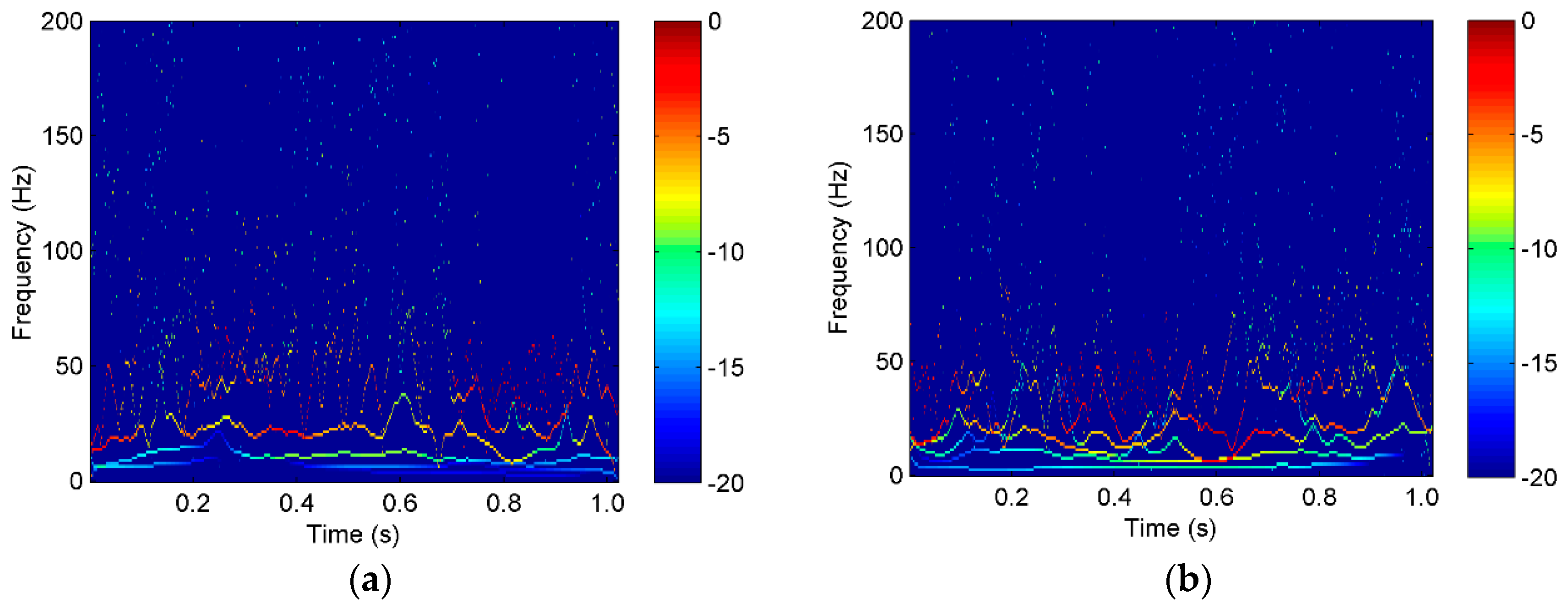
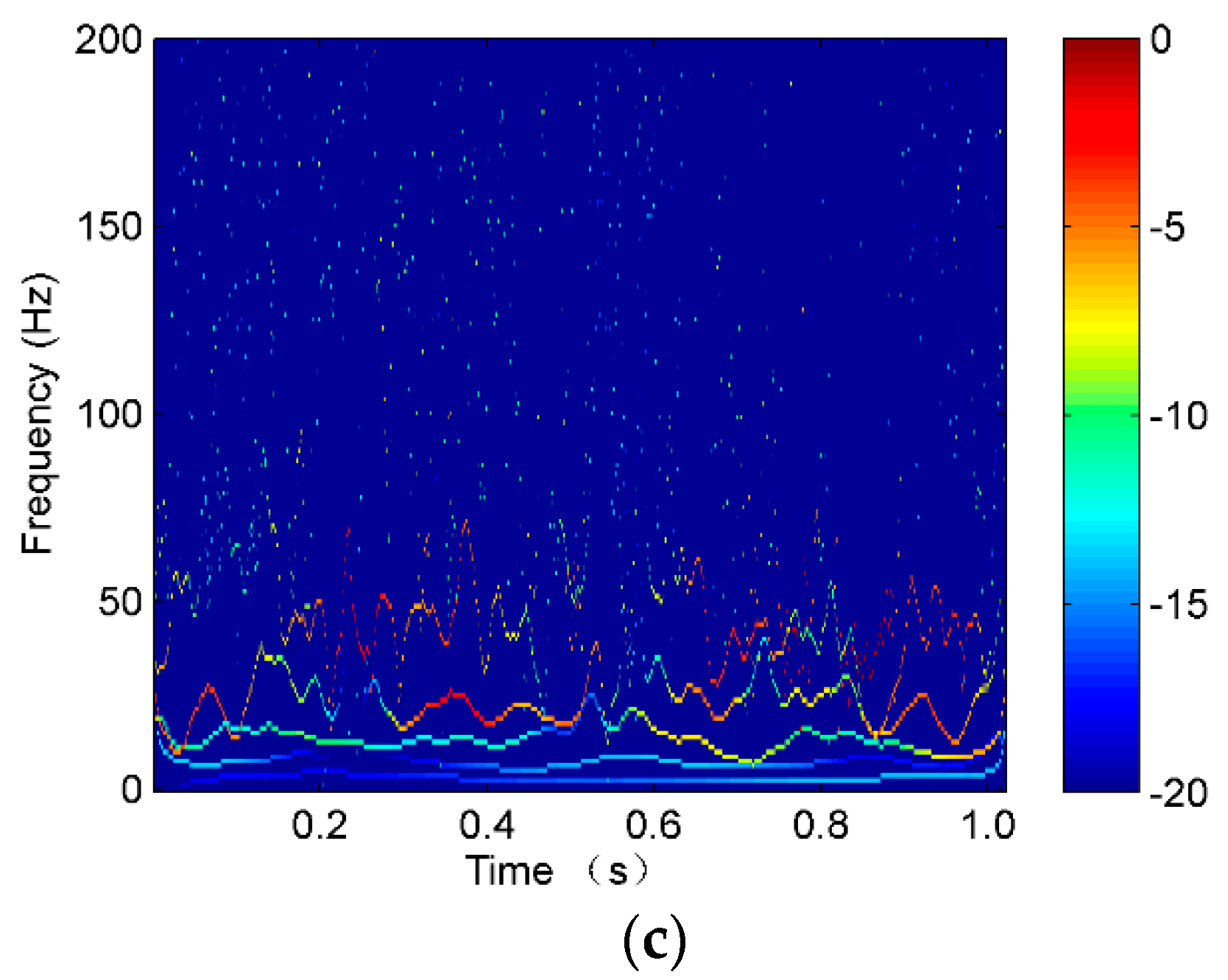
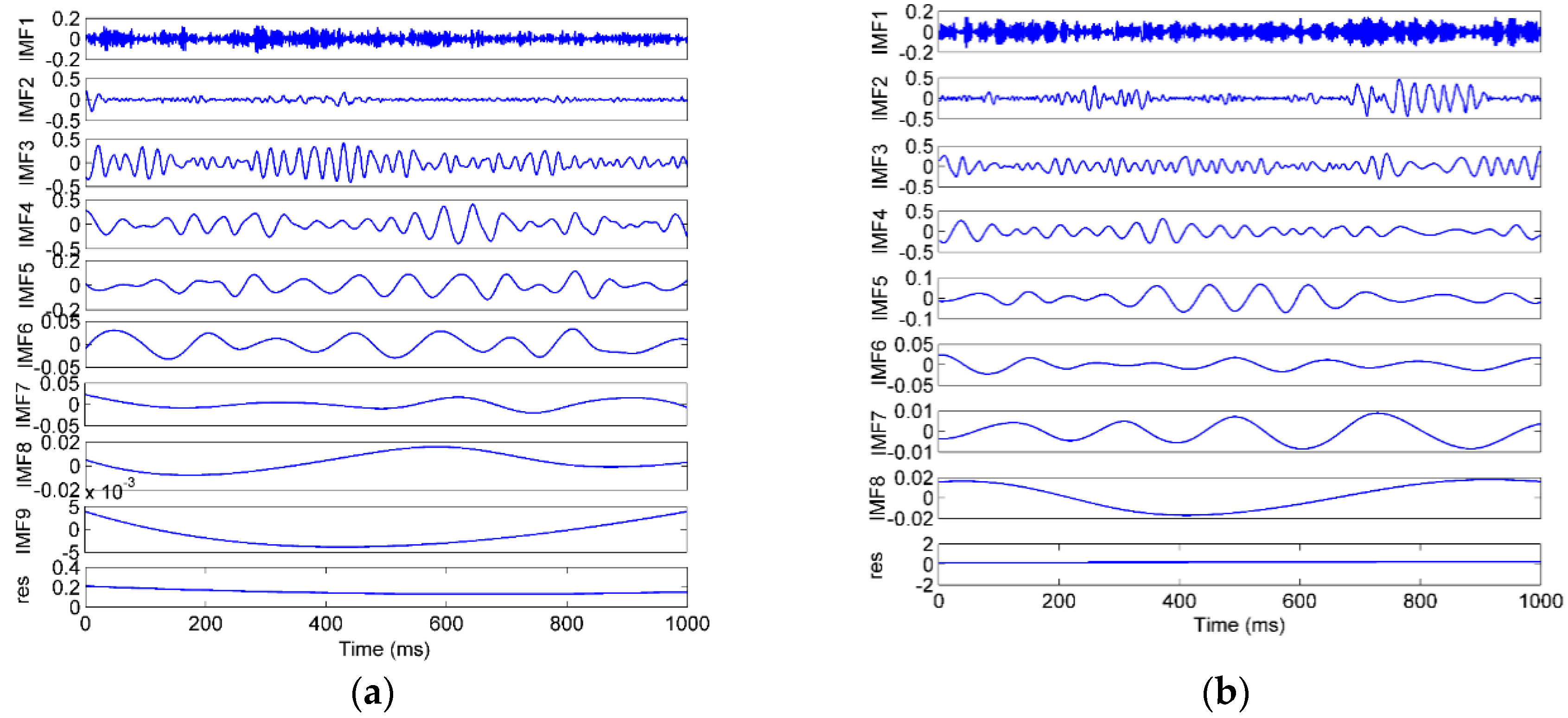
3.2.1. Signal Decomposition
3.2.2. Feature Extraction
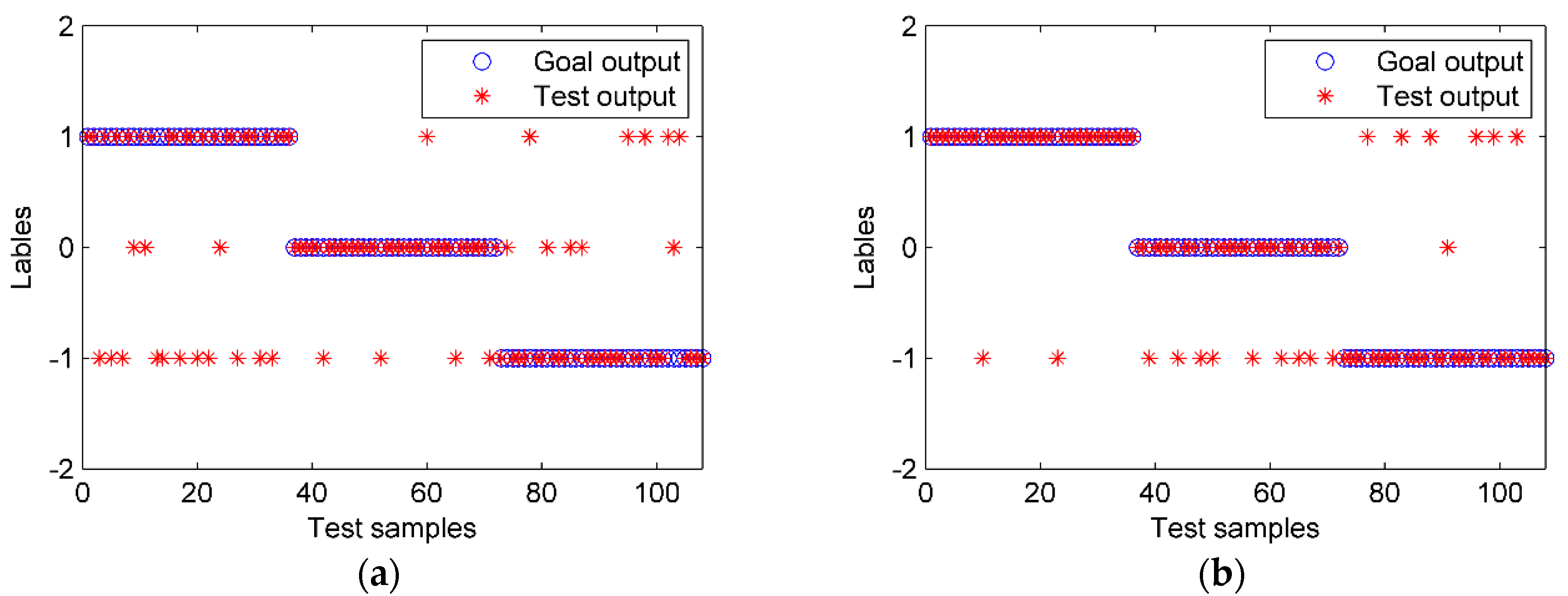
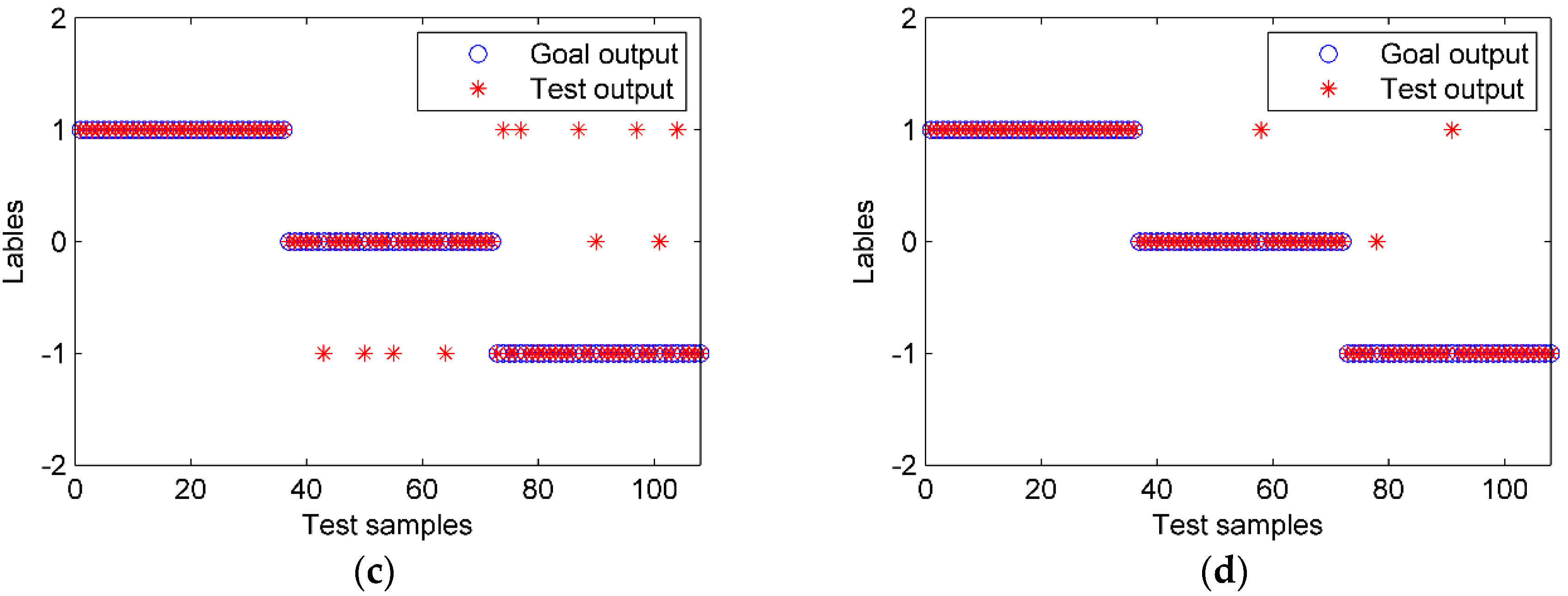
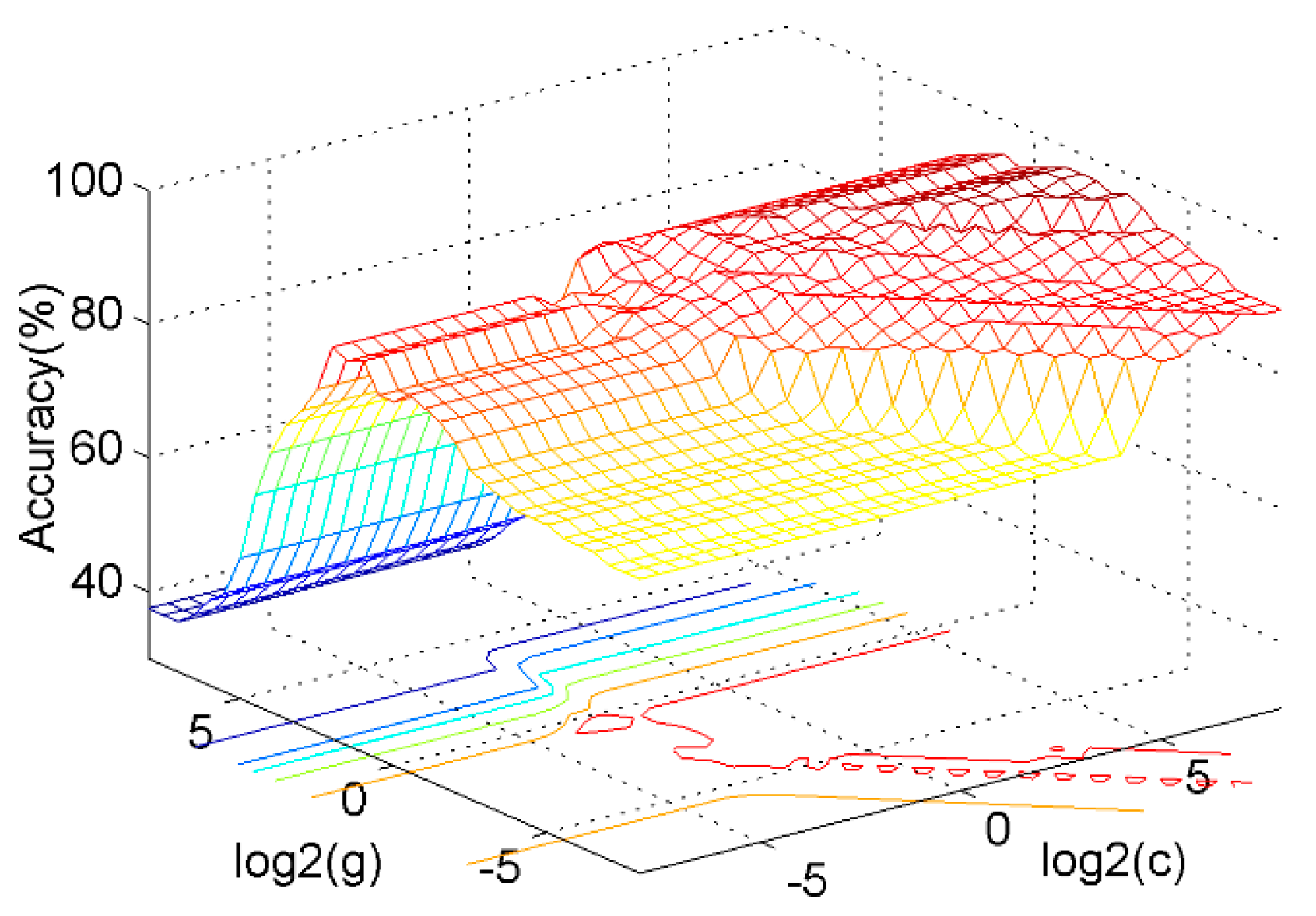
3.2.3. Optimized SVM
3.3. Experiment 2: Classification of the Five States of Multiple Ropes
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ANN | artificial neural network |
| AWGN | additive white Gaussian noise |
| DL | deep learning |
| EEMD | ensemble empirical mode decomposition |
| EMD | empirical mode decomposition |
| EN | energy |
| FT | Fourier transform |
| GA | genetic algorithm |
| IMF | intrinsic module function |
| IPE | improved permutation entropy |
| kNN | k Nearest Neighbor |
| NI | National Instruments |
| OAA | one-against-all |
| OAO | one-against-one |
| PE | permutation entropy |
| PSO | particle swarm optimization |
| RMS | root-mean-square |
| SNR | signal-to-noise ratio |
| STFT | short-time Fourier transform |
| SVM | support vector machine |
| VC | Vapnik-Chervonenkis |
| WT | wavelet transform |
References
- Wu, J.; Huang, S.; Kou, Z. Research and optimization of intelligent diagnosis algorithm based on rope tension. Measurement 2019, 147, 106892. [Google Scholar] [CrossRef]
- Xu, G.; Da, J.; Zhang, X.; Han, M.; Xia, T. A novel tension monitoring device of multi-rope friction hoister by using acoustic filtering sensor. J. Vibroeng. 2016, 18, 5537–5552. [Google Scholar]
- Lei, G.; Xu, G.; Zhang, X.; Zhang, Y.; Song, Z.; Xu, W. Study on Dynamic Monitoring of Wire Rope Tension Based on the Particle Damping Sensor. Sensors 2019, 19, 388. [Google Scholar] [CrossRef] [PubMed]
- Figlus, T. A Method for Diagnosing Gearboxes of Means of Transport Using Multi-Stage Filtering and Entropy. Entropy 2019, 21, 441. [Google Scholar] [CrossRef]
- Zhou, L.; Duan, F.; Corsar, M.; Elasha, F.; Mba, D. A study on helicopter main gearbox planetary bearing fault diagnosis. Appl. Acoust. 2019, 147, 4–14. [Google Scholar] [CrossRef]
- Wang, G.; Gu, F.; Rehab, I.; Ball, A.; Li, L. A Sparse Modulation Signal Bispectrum Analysis Method for Rolling Element Bearing Diagnosis. Math. Probl. Eng. 2018, 1–12. [Google Scholar] [CrossRef]
- Bustos, A.; Rubio, H.; Castejon, C.; Garcia-Prada, J.C. Condition monitoring of critical mechanical elements through Graphical Representation of State Configurations and Chromogram of Bands of Frequency. Measurement 2019, 135, 71–82. [Google Scholar] [CrossRef]
- Jiang, F.; Zhu, Z.; Li, W.; Xia, S.; Zhou, G. Lifting load monitoring of mine hoist through vibration signal analysis with variational mode decomposition. J. Vibroeng. 2017, 19, 6021–6035. [Google Scholar] [CrossRef]
- Wei, Y.; Li, Y.; Xu, M.; Huang, W. A Review of Early Fault Diagnosis Approaches and Their Applications in Rotating Machinery. Entropy 2019, 21, 409. [Google Scholar] [CrossRef]
- Ding, H.; Wang, Y.; Yang, Z.; Pfeiffer, O. Nonlinear Blind Source Separation and Fault Feature Extraction Method for Mining Machine Diagnosis. Appl. Sci. 2019, 9, 1852. [Google Scholar] [CrossRef]
- Feng, Z.; Liang, M.; Chu, F. Recent advances in time–frequency analysis methods for machinery fault diagnosis: A review with application examples. Mech. Syst. Signal Proc. 2013, 38, 165–205. [Google Scholar] [CrossRef]
- Chandra, N.H.; Sekhar, A.S. Fault detection in rotor bearing systems using time frequency techniques. Mech. Syst. Signal Proc. 2016, 72, 105–133. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N. Ensemble Empirical Mode Decomposition: A Noise Assisted Data Analysis Method. Adv. Adapt. Data Anal. 2011, 1, 1–49. [Google Scholar] [CrossRef]
- Lei, Y.; He, Z.; Zi, Y. Application of the EEMD method to rotor fault diagnosis of rotating machinery. Mech. Syst. Signal Proc. 2009, 23, 1327–1338. [Google Scholar] [CrossRef]
- Ben Ali, J.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar] [CrossRef]
- Hu, N.; Chen, H.; Cheng, Z.; Zhang, L.; Zhang, Y. Fault Diagnosis for Planetary Gearbox Based on EMD and Deep Convolutional Neural Networks. J. Mech. Sci. Technol. 2019, 55, 9–18. [Google Scholar] [CrossRef]
- Zhen, D.; Guo, J.; Xu, Y.; Zhang, H.; Gu, F. A Novel Fault Detection Method for Rolling Bearings Based on Non-Stationary Vibration Signature Analysis. Sensors 2019, 19, 3994. [Google Scholar] [CrossRef]
- Djemili, R.; Bourouba, H.; Amara Korba, M.C. Application of empirical mode decomposition and artificial neural network for the classification of normal and epileptic EEG signals. Biocybern. Biomed. Eng. 2016, 36, 285–291. [Google Scholar] [CrossRef]
- Bustos, A.; Rubio, H.; Castejón, C.; García-Prada, J.C. EMD-Based Methodology for the Identification of a High-Speed Train Running in a Gear Operating State. Sensors 2018, 18, 793. [Google Scholar] [CrossRef]
- Park, S.; Kim, S.; Choi, J. Gear fault diagnosis using transmission error and ensemble empirical mode decomposition. Mech. Syst. Signal Proc. 2018, 108, 262–275. [Google Scholar] [CrossRef]
- Buzzoni, M.; Mucchi, E.; D’Elia, G.; Dalpiaz, G. Diagnosis of Localized Faults in Multistage Gearboxes: A Vibrational Approach by Means of Automatic EMD-Based Algorithm. Shock Vib. 2017, 2017, 1–22. [Google Scholar] [CrossRef]
- Komaty, A.; Boudraa, A.; Augier, B.; Dare-Emzivat, D. EMD-Based Filtering Using Similarity Measure Between Probability Density Functions of IMFs. IEEE Trans. Instrum. Meas. 2014, 63, 27–34. [Google Scholar] [CrossRef]
- Fu, W.; Tan, J.; Xu, Y.; Wang, K.; Chen, T. Fault Diagnosis for Rolling Bearings Based on Fine-Sorted Dispersion Entropy and SVM Optimized with Mutation SCA-PSO. Entropy 2019, 21, 404. [Google Scholar] [CrossRef]
- Rai, A.; Upadhyay, S.H. A review on signal processing techniques utilized in the fault diagnosis of rolling element bearings. Tribol. Int. 2016, 96, 289–306. [Google Scholar] [CrossRef]
- Cuesta-Frau, D.; Miró-Martínez, P.; Oltra-Crespo, S.; Jordán-Núñez, J.; Vargas, B.; González, P.; Varela-Entrecanales, M. Model Selection for Body Temperature Signal Classification Using Both Amplitude and Ordinality-Based Entropy Measures. Entropy 2018, 20, 853. [Google Scholar] [CrossRef]
- Azami, H.; Escudero, J. Amplitude-aware permutation entropy: Illustration in spike detection and signal segmentation. Comput. Meth. Programs Biomed. 2016, 128, 40–51. [Google Scholar] [CrossRef]
- Berger, S.; Schneider, G.; Kochs, E.; Jordan, D. Permutation Entropy: Too Complex a Measure for EEG Time Series? Entropy 2017, 19, 692. [Google Scholar] [CrossRef]
- Zanin, M.; Zunino, L.; Rosso, O.A.; Papo, D. Permutation Entropy and Its Main Biomedical and Econophysics Applications: A Review. Entropy 2012, 14, 1553–1577. [Google Scholar] [CrossRef]
- Mitiche, I.; Morison, G.; Nesbitt, A.; Stewart, B.; Boreham, P. Entropy-Based Feature Extraction for Electromagnetic Discharges Classification in High-Voltage Power Generation. Entropy 2018, 20, 549. [Google Scholar] [CrossRef]
- Bian, C.; Qin, C.; Ma, Q.D.Y.; Shen, Q. Modified permutation-entropy analysis of heartbeat dynamics. Phys. Rev. E 2012, 85, 21906. [Google Scholar] [CrossRef] [PubMed]
- Liu, R.; Yang, B.; Zio, E.; Chen, X. Artificial intelligence for fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Proc. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Santos, P.; Villa, L.; Reñones, A.; Bustillo, A.; Maudes, J. An SVM-Based Solution for Fault Detection in Wind Turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Liang, Y.; Zhou, J.; Zang, Y. A novel bearing fault diagnosis model integrated permutation entropy, ensemble empirical mode decomposition and optimized SVM. Measurement 2015, 69, 164–179. [Google Scholar] [CrossRef]
- Jin, H.; Titus, A.; Liu, Y.; Wang, Y.; Han, A.Z. Fault Diagnosis of Rotary Parts of a Heavy-Duty Horizontal Lathe Based on Wavelet Packet Transform and Support Vector Machine. Sensors 2019, 19, 4069. [Google Scholar] [CrossRef]
- Jafarian, K.; Mobin, M.; Jafari-Marandi, R.; Rabiei, E. Misfire and valve clearance faults detection in the combustion engines based on a multi-sensor vibration signal monitoring. Measurement 2018, 128, 527–536. [Google Scholar] [CrossRef]
- Chang, C.; Lin, C. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- David, E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison-Wesley: Boston, MA, USA, 1989. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95, International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Hassan, R.; Cohanim, B.; De, O. A Comparison of Particle Swarm Optimization and the Genetic Algorithm. In Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Austin, TX, USA, 18–21 April 2005; pp. 1138–1150. [Google Scholar]
- Lee, D.; Ahn, J.; Koh, B. Fault Detection of Bearing Systems through EEMD and Optimization Algorithm. Sensors 2017, 17, 2477. [Google Scholar] [CrossRef]
- Tong, Q.; Han, B.; Lin, Y.; Zhang, W. Multi-fault diagnosis for rolling element bearings based on intrinsic mode function screening and optimized least squares support vector machine. J. Vibroeng. 2016, 18, 4430–4448. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation Entropy: A Natural Complexity Measure for Time Series. Phys. Rev. Lett. 2002, 88, 174102. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Hu, Q.; He, Z.; Zhang, Z.; Zi, Y. Fault diagnosis of rotating machinery based on improved wavelet package transform and SVMs ensemble. Mech. Syst. Signal Proc. 2007, 21, 688–705. [Google Scholar] [CrossRef]
- Huang, Y.; Fu, J.; Wang, R.; Gan, Q.; Liu, A. Unified Practical Formulas for Vibration-Based Method of Cable Tension Estimation. Adv. Struct. Eng. 2016, 18, 405–422. [Google Scholar] [CrossRef]
- Peng, X.; Gong, X.; Li, J.; Wu, X. Theoretical study and tests for transverse vibration features of a winding hoisting system’s hanging rope. J. Vib. Shock 2019, 38, 8–15. [Google Scholar]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Proc. 2013, 35, 108–126. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module/Model | Main Parameters | |
|---|---|---|
| Data acquisition 1 | NI CompactDAQ with NI 9234 module | Sampling rate: 51.2 k/s; Resolution: 24 bit. |
| Data acquisition 2 | NI CompactDAQ with NI-9220 module | Sampling rate: 100 k/s; Resolution: 16 bit. |
| Accelerometer | PCB 352C65 | Measurement range: ±50 g; Frequency range: 0.5 Hz–10 kHz; Sensitivity: 100 mV/g. |
| Tension sensor | NOS-L101 | Range: 10,000 N; Error: <1%. |
| Label | State | The Tension of Rope A (N) | The Tension of Rope B (N) |
|---|---|---|---|
| S1 | Overload | 5600 | 5600 |
| S2 | Normal | 4900 | 4900 |
| S3 | Underload | 4200 | 4200 |
| S4 | Imbalance 1 | 5600 | 4200 |
| S5 | Imbalance 2 | 4200 | 5600 |
| Feature | IMFs | S1-A Accuracy (%) | S2-A Accuracy (%) | S3-A Accuracy (%) | Total Accuracy (%) |
|---|---|---|---|---|---|
| EN | De-noised signal and main IMFs | 61.1 | 86.1 | 72.2 | 73.1 |
| PE | 94.4 | 75.0 | 80.6 | 83.3 | |
| IPE | 100.0 | 88.9 | 80.6 | 89.8 | |
| {PE, EN} | 100.0 | 94.4 | 88.9 | 94.4 | |
| {IPE, EN} | 100.0 | 97.2 | 94.4 | 97.2 | |
| {IPE, EN} | All IMFs | 88.9 | 88.9 | 86.1 | 88.0 |
| Model | Total Accuracy (%) | Computing Time(s) |
|---|---|---|
| SVM | 88.0 | 0.1 |
| Grid-SVM | 92.6 | 7.4 |
| GA-SVM | 94.4 | 5.3 |
| PSO-SVM | 97.2 | 4.5 |
| Decomposition | Feature Extraction | Classification Model | Total Accuracy (%) |
|---|---|---|---|
| EMD | IPE + EN | PSO-SVM | 83.3 |
| EEMD | IPE + EN | PSO-SVM | 94.4 |
| EEMD | IPE + EN | BP neural network | 82.2 |
| EEMD | IPE + EN | SVM | 78.9 |
| EEMD | PE + EN | PSO-SVM | 92.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, S.; Tan, J.; Shi, L.; Deng, J. Rope Tension Fault Diagnosis in Hoisting Systems Based on Vibration Signals Using EEMD, Improved Permutation Entropy, and PSO-SVM. Entropy 2020, 22, 209. https://doi.org/10.3390/e22020209
Xue S, Tan J, Shi L, Deng J. Rope Tension Fault Diagnosis in Hoisting Systems Based on Vibration Signals Using EEMD, Improved Permutation Entropy, and PSO-SVM. Entropy. 2020; 22(2):209. https://doi.org/10.3390/e22020209
Chicago/Turabian StyleXue, Shaohua, Jianping Tan, Lixiang Shi, and Jiwei Deng. 2020. "Rope Tension Fault Diagnosis in Hoisting Systems Based on Vibration Signals Using EEMD, Improved Permutation Entropy, and PSO-SVM" Entropy 22, no. 2: 209. https://doi.org/10.3390/e22020209
APA StyleXue, S., Tan, J., Shi, L., & Deng, J. (2020). Rope Tension Fault Diagnosis in Hoisting Systems Based on Vibration Signals Using EEMD, Improved Permutation Entropy, and PSO-SVM. Entropy, 22(2), 209. https://doi.org/10.3390/e22020209