Akaike’s Bayesian Information Criterion for the Joint Inversion of Terrestrial Water Storage Using GPS Vertical Displacements, GRACE and GLDAS in Southwest China




Abstract
1. Introduction
2. Study Area and Datasets
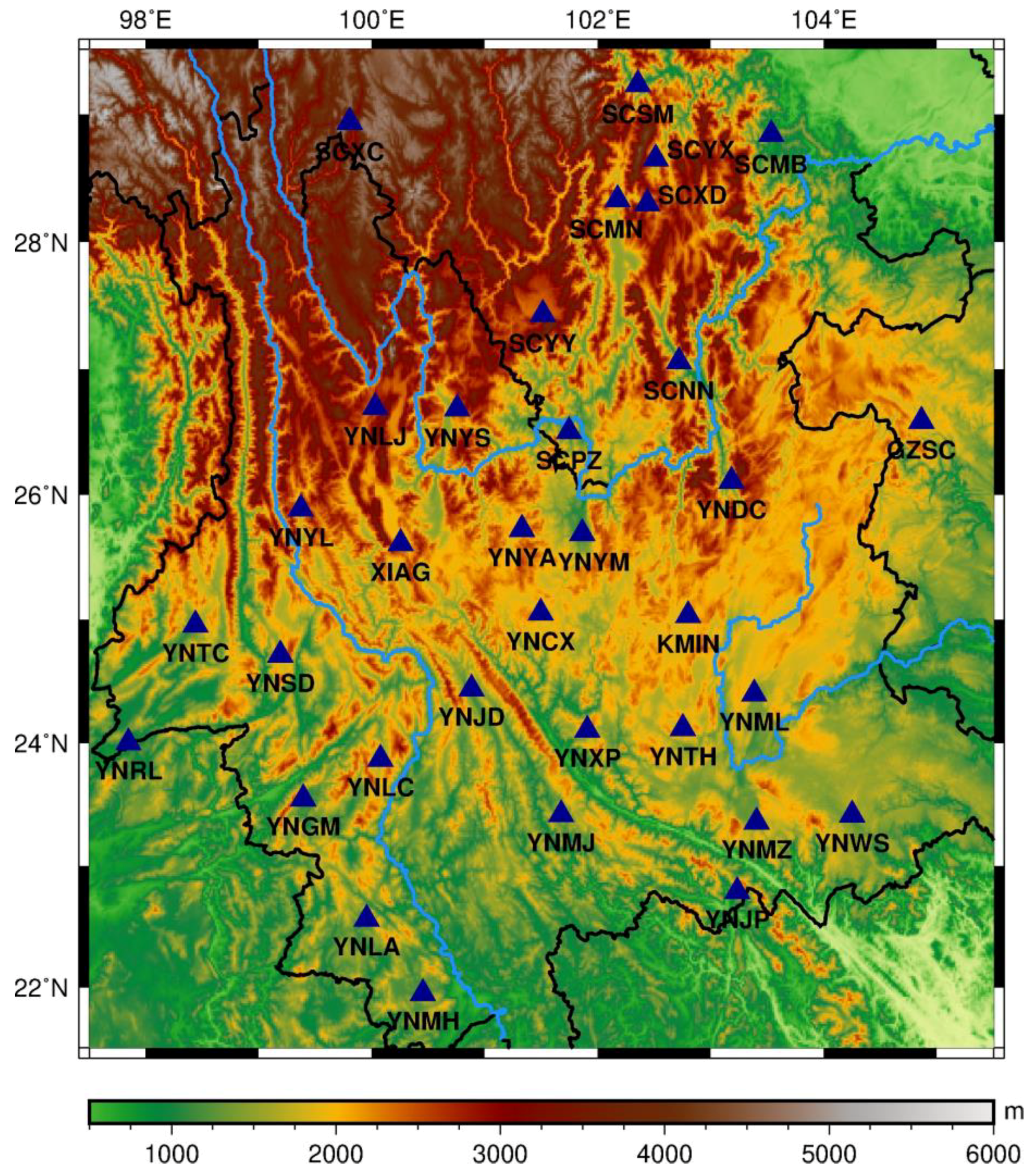
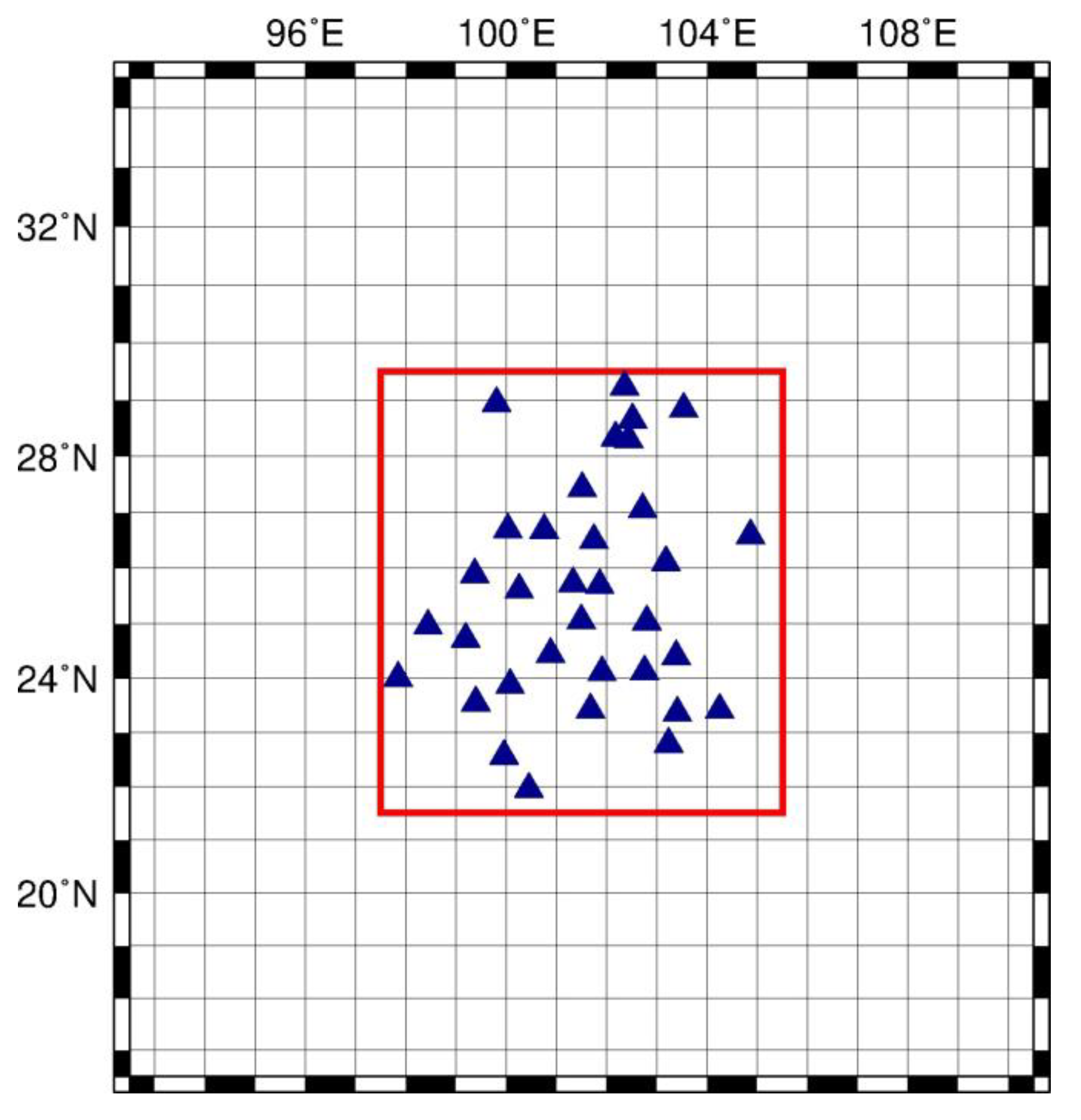
2.1. Geographic Background of Southwest China
2.2. GPS Data
2.3. GRACE and GLDAS Data
3. GPS Data Processing
3.1. GPS Data Preprocessing
3.2. Extraction of TWS Signal from GPS
3.3. Spectral Analysis and Filtering
3.4. Regional Stacking Filtering
3.5. GPS Annual Signal Estimation
4. Inversion Methodology of TWS from GPS
4.1. Inversion Model
4.2. Joint Inversion of GPS VD and GRACE or GLDAS TWS
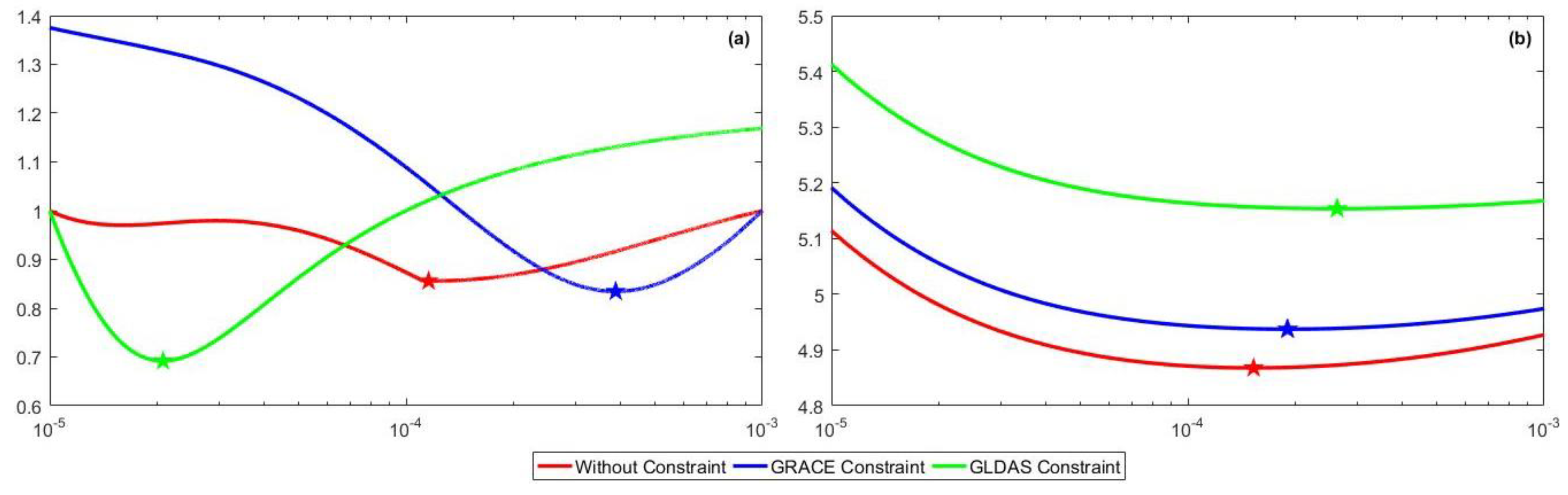
4.3. Akaike’s Bayesian Information Criterion (ABIC)
5. Results
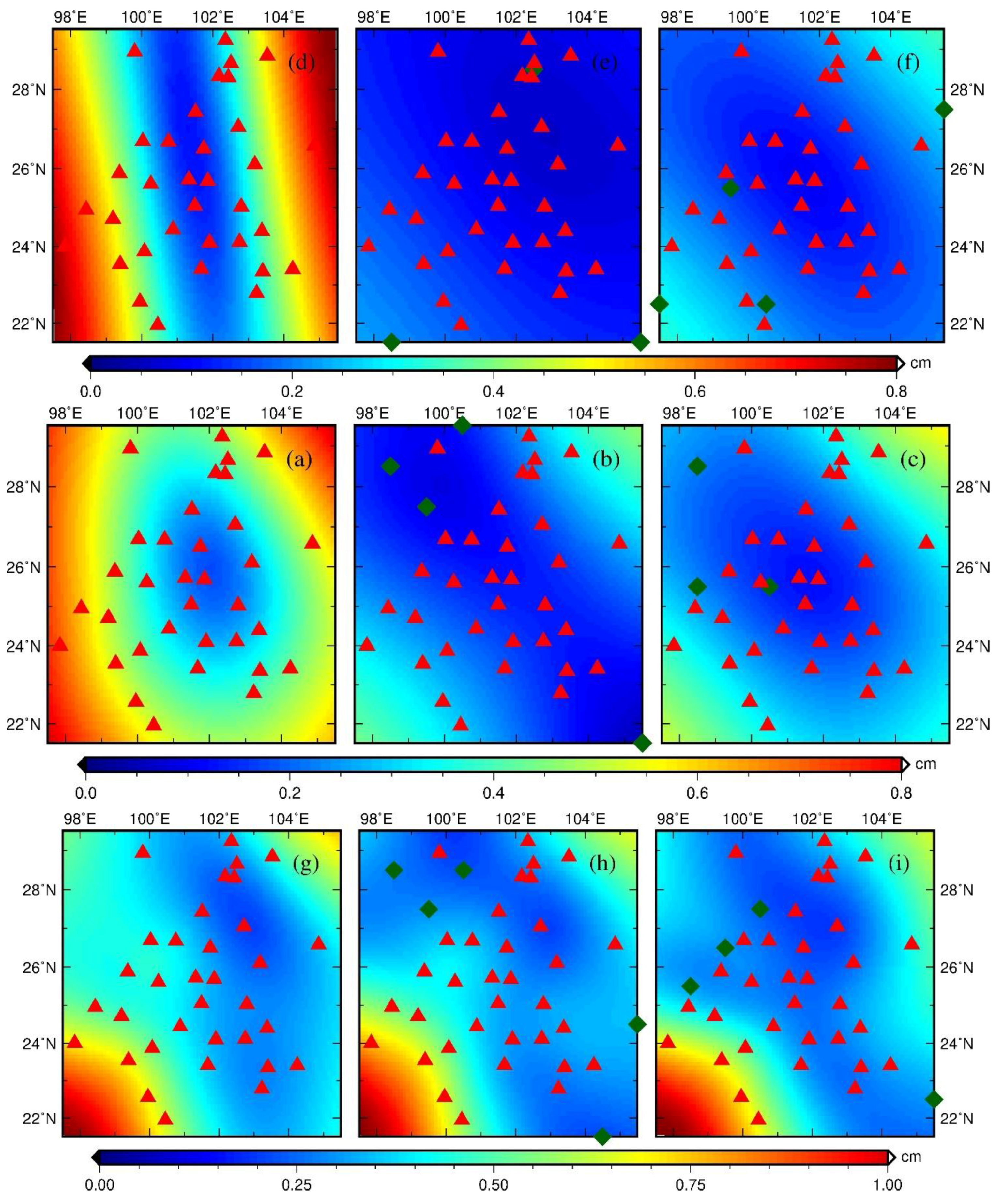
5.1. TWS Inferred from GPS without Constraint Points
5.2. TWS Inferred from GPS with Constraint Points
6. Discussion
6.1. Model Fitness
6.2. Inversion Process
6.3. Comparison with Other Observations
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Postel, S.L.; Daily, G.C.; Ehrlich, P.R. Human Appropriation of Renewable Fresh Water. Science 1996, 271, 785–788. [Google Scholar] [CrossRef]
- Piao, S.; Ciais, P.; Huang, Y.; Shen, Z.; Peng, S.; Li, J.; Zhou, L.; Liu, H.; Ma, Y.; Ding, Y.; et al. The impacts of climate change on water resources and agriculture in China. Nature 2010, 467, 43–51. [Google Scholar] [CrossRef]
- Famiglietti, J.S. Remote sensing of terrestrial water storage, soil moisture and surface waters. Geophys. Monogr. 2004, 150, 197–207. [Google Scholar]
- Tapley, B.D.; Bettadpur, S.; Watkins, M.; Reigber, C. The gravity recovery and climate experiment: Mission overview and early results. Geophys. Res. Lett. 2004, 31, L09607. [Google Scholar] [CrossRef]
- Rodell, M.; Houser, P.; Jambor, U.; Gottschalck, J.; Mitchell, K.; Meng, C.-J.; Arsenault, K.; Cosgrove, B.; Radakovich, J.; Bosilovich, M. The global land data assimilation system. Bull. Am. Meteorol. Soc. 2004, 85, 381–394. [Google Scholar] [CrossRef]
- Seo, K.-W.; Wilson, C.R.; Chen, J.; Waliser, D.E. GRACE’s spatial aliasing error. Geophys. J. Int. 2008, 172, 41–48. [Google Scholar] [CrossRef]
- Wiese, D.N.; Visser, P.; Nerem, R.S. Estimating low resolution gravity fields at short time intervals to reduce temporal aliasing errors. Adv. Space Res. 2011, 48, 1094–1107. [Google Scholar] [CrossRef]
- Huang, Z.; Jun-Yi, G.; Shum, C.; Wan, J.; Duan, J.; Fok, H.S.; Chung-Yen, K. On the accuracy of glacial isostatic adjustment models for geodetic observations to estimate arctic ocean sea-level change. TAO Terr. Atmos. Ocean. Sci. 2013, 24, 471. [Google Scholar] [CrossRef]
- Heki, K. Seasonal modulation of interseismic strain buildup in northeastern Japan driven by snow loads. Science 2001, 293, 89–92. [Google Scholar] [CrossRef]
- Blewitt, G.; Lavallée, D. Effect of annual signals on geodetic velocity. J. Geophys. Res. Solid Earth 2002, 107, ETG 9-1–ETG 9-11. [Google Scholar] [CrossRef]
- Davis, J.L.; Elósegui, P.; Mitrovica, J.X.; Tamisiea, M.E. Climate-driven deformation of the solid Earth from GRACE and GPS. Geophys. Res. Lett. 2004, 31, 357–370. [Google Scholar] [CrossRef]
- Liao, H.H.; Zhong, M.; Zhou, X.H. Climate-driven annual vertical deformation of the solid Earth calculated from GRACE. Chin. J. Geophys. 2010, 53, 321–328. [Google Scholar] [CrossRef]
- Tan, W.; Dong, D.; Chen, J.; Wu, B. Analysis of systematic differences from GPS-measured and GRACE-modeled deformation in Central Valley, California. Adv. Space Res. 2016, 57, 19–29. [Google Scholar] [CrossRef]
- Wei, Z.; Fei, L.; Hao, W.; Yan, J. Regional characteristics and influencing factors of seasonal vertical crustal motions in Yunnan, China. Geophys. J. Int. 2017, 210, 1295–1304. [Google Scholar]
- Farrell, W. Deformation of the Earth by surface loads. Rev. Geophys. 1972, 10, 761–797. [Google Scholar] [CrossRef]
- Argus, D.F.; Fu, Y.; Landerer, F.W. Seasonal variation in total water storage in California inferred from GPS observations of vertical motion. Geophys. Res. Lett. 2014, 41, 1971–1980. [Google Scholar] [CrossRef]
- Fu, Y.; Argus, D.F.; Landerer, F.W. GPS As an independent measurement to estimate terrestrial water storage variations in Washington and Oregon. J. Geophys. Res. Solid Earth 2015, 120, 552–566. [Google Scholar] [CrossRef]
- Jin, S.; Zhang, T. Terrestrial Water Storage Anomalies Associated with Drought in Southwestern USA from GPS Observations. Surv. Geophys. 2016, 37, 1139–1156. [Google Scholar] [CrossRef]
- Ferreira, V.G.; Ndehedehe, C.E.; Montecino, H.C.; Yong, B.; Yuan, P.; Abdalla, A.; Mohammed, A.S. Prospects for Imaging Terrestrial Water Storage in South America Using Daily GPS Observations. Remote Sens. 2019, 11, 679. [Google Scholar] [CrossRef]
- Knappe, E.; Bendick, R.; Martens, H.; Argus, D.; Gardner, W. Downscaling vertical GPS observations to derive watershed-scale hydrologic loading in the Northern Rockies. Water Resour. Res. 2018, 55, 391–401. [Google Scholar] [CrossRef]
- Enzminger, T.L.; Small, E.E.; Borsa, A.A. Accuracy of Snow Water Equivalent Estimated From GPS Vertical Displacements: A Synthetic Loading Case Study for Western US Mountains. Water Resour. Res. 2018, 54, 581–599. [Google Scholar] [CrossRef]
- Dill, R.; Klemann, V.; Dobslaw, H. Relocation of River Storage From Global Hydrological Models to Georeferenced River Channels for Improved Load-Induced Surface Displacements. J. Geophys. Res. Solid Earth 2018, 123, 7151–7164. [Google Scholar] [CrossRef]
- Milliner, C.; Materna, K.; Bürgmann, R.; Fu, Y.; Moore, A.W.; Bekaert, D.; Adhikari, S.; Argus, D.F. Tracking the weight of Hurricane Harvey’s stormwater using GPS data. Sci. Adv. 2018, 4, eaau2477. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Yao, Y.; Fok, H.S.; Hu, Y.; Chen, Q. Potential Seasonal Terrestrial Water Storage Monitoring from GPS Vertical Displacements: A Case Study in the Lower Three-Rivers Headwater Region, China. Sensors 2016, 16, 1526. [Google Scholar] [CrossRef] [PubMed]
- Yabuki, T.; Matsu’Ura, M. Geodetic data inversion using a Bayesian information criterion for spatial distribution of fault slip. Geophys. J. Int. 1992, 109, 363–375. [Google Scholar] [CrossRef]
- Fukahata, Y.; Nishitani, A.; Matsu’Ura, M. Geodetic data inversion using ABIC to estimate slip history during one earthquake cycle with viscoelastic slip-response functions. Geophys. J. R. Astron. Soc. 2010, 156, 140–153. [Google Scholar] [CrossRef]
- Xu, C.; Ding, K.; Cai, J.; Grafarend, E.W. Methods of determining weight scaling factors for geodetic–geophysical joint inversion. J. Geodyn. 2009, 47, 39–46. [Google Scholar] [CrossRef]
- Gu, Y.; Yuan, L.; Fan, D.; Wei, Y.; Yong, S. Seasonal crustal vertical deformation induced by environmental mass loading in mainland China derived from GPS, GRACE and surface loading models. Adv. Space Res. 2017, 59, 88–102. [Google Scholar] [CrossRef]
- Shi, Y.F.; Liu, C.H.; Kang, E. The Glacier Inventory of China. Ann. Glaciol. 2010, 50, 1–4. [Google Scholar] [CrossRef]
- Wang, B.; Huang, F.; Zhiwei, W.U.; Yang, J.; Xiouhua, F.U.; Kikuchi, K. Multi-scale climate variability of the South China Sea monsoon: A review. Dyn. Atmos. Oceans 2009, 47, 15–37. [Google Scholar] [CrossRef]
- Tang, J.; Yin, X.A.; Yang, P.; Yang, Z.F. Assessment of Contributions of Climatic Variation and Human Activities to Streamflow Changes in the Lancang River, China. Water Resour. Manag. 2014, 28, 2953–2966. [Google Scholar] [CrossRef]
- Nie, Y.; Chen, H.; Wang, K.; Yang, J. Water source utilization by woody plants growing on dolomite outcrops and nearby soils during dry seasons in karst region of Southwest China. J. Hydrol. 2012, 420, 264–274. [Google Scholar] [CrossRef]
- Yin, A.; Harrison, T.M. Geologic Evolution of the Himalayan-Tibetan Orogen. Annu. Rev. Earth Planet. Sci. 2000, 28, 211–280. [Google Scholar] [CrossRef]
- Tesauro, M.; Audet, P.; Kaban, M.K.; Bürgmann, R.; Cloetingh, S. The effective elastic thickness of the continental lithosphere: Comparison between rheological and inverse approaches. Geochem. Geophys. Geosyst. 2012, 13, Q09001. [Google Scholar] [CrossRef]
- Dill, R.; Klemann, V.; Martinec, Z.; Tesauro, M. Applying local Green’s functions to study the influence of the crustal structure on hydrological loading displacements. J. Geodyn. 2015, 88, 14–22. [Google Scholar] [CrossRef]
- Gan, W.J.; Zhang, R.; Tang, F.T.; Chen, T. Development of the Crustal Movement Observation Network of China and its Applications. Recent Dev. World Seismol. 2007, 2007, 43–52. [Google Scholar]
- Swenson, S.; Wahr, J. Post-processing removal of correlated errors in GRACE data. Geophys. Res. Lett. 2006, 33, L08402. [Google Scholar] [CrossRef]
- Swenson, S. GRACE Monthly Land Water Mass Grids NETCDF Release 5.0. Ver. 5.0; Physical Oceanography Distributed Active Archive Center (PO. DAAC): Pasadena, CA, USA, 2012.
- Landerer, F.W.; Swenson, S.C. Accuracy of scaled GRACE terrestrial water storage estimates. Water Resour. Res. 2012, 48, 4531. [Google Scholar] [CrossRef]
- Herring, T.; King, R.; McClusky, S. GAMIT Reference Manual, Release 10.4; Massachusetts Institute of Technology: Cambridge, MA, USA, 2010. [Google Scholar]
- Boehm, J.; Werl, B.; Schuh, H. Troposphere Mapping Functions for GPS and Very Long Baseline Interferometry from European Centre for Medium-Range Weather Forecasts Operational Analysis Data. J. Geophys. Res. Solid Earth 2006, 111, B02406. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions; Bureau International Des Poids Et Mesures Sevres: Sèvres, France, 2010. [Google Scholar]
- Collilieux, X.; Altamimi, Z.; Coulot, D.; Ray, J.; Sillard, P. Comparison of very long baseline interferometry, GPS, and satellite laser ranging height residuals from ITRF2005 using spectral and correlation methods. J. Geophys. Res. Solid Earth 2007, 112, B12403. [Google Scholar] [CrossRef]
- Ray, J.; Altamimi, Z.; Collilieux, X.; Dam, T.V. Anomalous harmonics in the spectra of GPS position estimates. GPS Solut. 2008, 12, 55–64. [Google Scholar] [CrossRef]
- Penna, N.; Stewart, M. Aliased tidal signatures in continuous GPS height time series. Geophys. Res. Lett. 2003, 30, 2184. [Google Scholar] [CrossRef]
- Bogusz, J.; Klos, A. On the significance of periodic signals in noise analysis of GPS station coordinates time series. GPS Solut. 2016, 20, 655–664. [Google Scholar] [CrossRef]
- Emery, W.J.; Thomson, R.E. Data Analysis Methods in Physical Oceanography; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Khan, S.A.; Liu, L.; Wahr, J.; Howat, I.; Joughin, I.; van Dam, T.; Fleming, K. GPS measurements of crustal uplift near Jakobshavn Isbræ due to glacial ice mass loss. J. Geophys. Res. Solid Earth 2010, 115, B09405. [Google Scholar] [CrossRef]
- Wdowinski, S.; Bock, Y.; Zhang, J.; Fang, P.; Genrich, J. Southern California permanent GPS geodetic array: Spatial filtering of daily positions for estimating coseismic and postseismic displacements induced by the 1992 Landers earthquake. J. Geophys. Res. Solid Earth 1997, 102, 18057–18070. [Google Scholar] [CrossRef]
- Jiang, W.; Ma, J.; Zhao, L.; Zhou, X.; Zhou, B. Effect of removing the common mode errors on linear regression analysis of noise amplitudes in position time series of a regional GPS network & a case study of GPS stations in Southern California. Adv. Space Res. 2018, 61, 2521–2530. [Google Scholar]
- Dong, D.; Fang, P.; Bock, Y.; Webb, F.; Prawirodirdjo, L.; Kedar, S.; Jamason, P. Spatiotemporal filtering using principal component analysis and Karhunen-Loeve expansion approaches for regional GPS network analysis. J. Geophys. Res. Solid Earth 2006, 111, B03405. [Google Scholar] [CrossRef]
- Johansson, J.M.; Davis, J.L.; Scherneck, H.G.; Milne, G.A.; Vermeer, M.; Mitrovica, J.X.; Bennett, R.A.; Jonsson, B.; Elgered, G.; Elósegui, P. Continuous GPS measurements of postglacial adjustment in Fennoscandia 1. Geodetic results. J. Geophys. Res. Solid Earth 2002, 107, ETG 3-1–ETG 3-27. [Google Scholar] [CrossRef]
- Khan, S.A.; Wahr, J.; Leuliette, E.; Dam, T.V.; Larson, K.M.; Francis, O. Geodetic measurements of postglacial adjustments in Greenland. J. Geophys. Res. Solid Earth 2008, 113, B02402. [Google Scholar] [CrossRef]
- Bevis, M.; Brown, A. Trajectory models and reference frames for crustal motion geodesy. J. Geod. 2014, 88, 283–311. [Google Scholar] [CrossRef]
- Williams, S.D.P.; Bock, Y.; Fang, P.; Jamason, P.; Nikolaidis, R.M.; Prawirodirdjo, L.; Miller, M.; Johnson, D.J. Error analysis of continuous GPS position time series. J. Geophys. Res. 2004, 109, B03412. [Google Scholar] [CrossRef]
- Bos, M.S. Fast error analysis of continuous GNSS observations with missing data. J. Geod. 2013, 87, 351–360. [Google Scholar] [CrossRef]
- Yan, H.; Chen, B.; Zhu, Y.; Zhang, W.; Zhong, M.; Liu, Y. Thermal effects on vertical displacement of GPS stations in China. Chin. J. Geophys. 2010, 53, 825–832. [Google Scholar] [CrossRef]
- Xu, X.; Dong, D.; Ming, F.; Zhou, Y.; Na, W.; Feng, Z. Contributions of thermoelastic deformation to seasonal variations in GPS station position. GPS Solut. 2017, 21, 1265–1274. [Google Scholar] [CrossRef]
- Dong, D.; Fang, P.; Bock, Y.; Cheng, M.K.; Miyazaki, S. Anatomy of apparent seasonal variations from GPS-derived site position time series. J. Geophys. Res. Solid Earth 2002, 107, ETG 9-1–ETG 9-16. [Google Scholar] [CrossRef]
- Guo, J.Y.; Li, Y.B.; Huang, Y.; Deng, H.T.; Xu, S.Q.; Ning, J.S. Green’s function of the deformation of the Earth as a result of atmospheric loading. Geophys. J. R. Astron. Soc. 2004, 159, 53–68. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.I. Solutions of Ill-Posed Problems; Winston & Sons: Washington, DC, USA, 1977. [Google Scholar]
- Fok, H.S.; Iz, H.B.; Schaffrin, B. Comparison of Four Geodetic Network Densification Solutions. Emp. Surv. Rev. 2009, 41, 44–56. [Google Scholar] [CrossRef]
- Funning, G.J.; Fukahata, Y.; Yagi, Y.; Parsons, B. A method for the joint inversion of geodetic and seismic waveform data using ABIC: Application to the 1997 Manyi, Tibet, earthquake. Geophys. J. Int. 2014, 196, 1564–1579. [Google Scholar] [CrossRef]
- Yi, L.; Xu, C.; Zhang, X.; Wen, Y.; Jiang, G.; Li, M.; Wang, Y. Joint inversion of GPS, InSAR and teleseismic data sets for the rupture process of the 2015 Gorkha, Nepal, earthquake using a generalized ABIC method. J. Asian Earth Sci. 2017, 148, 121–130. [Google Scholar] [CrossRef]
- Cui, X.; Yu, Z.; Tao, B. Generalized Surveying Adjustment; Wuhan Technique University of Surveying and Mapping: Wuhan, China, 2001. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GPS Site | GPS Velocity (mm/year) | Annual Amplitude (mm) | GPS Site | GPS Velocity (mm/year) | Annual Amplitude (mm) |
|---|---|---|---|---|---|
| GZSC | −0.12 ± 0.35 | 4.87 ± 0.32 | YNLA | −3.25 ± 1.28 | 10.94 ± 0.78 |
| KMIN | 2.09 ± 1.40 | 5.00 ± 0.80 | YNLC | −1.09 ± 0.46 | 10.60 ± 0.43 |
| SCMB | −1.10 ± 0.53 | 3.42 ± 0.43 | YNLJ | −1.32 ± 0.34 | 8.77 ± 0.28 |
| SCMN | −1.00 ± 0.35 | 7.34 ± 0.32 | YNMH | −1.04 ± 2.19 | 6.71 ± 1.13 |
| SCNN | 1.93 ± 2.47 | 8.02 ± 1.25 | YNMJ | 0.88 ± 0.45 | 9.71 ± 0.41 |
| SCPZ | −0.74 ± 0.22 | 7.92 ± 0.22 | YNML | −1.34 ± 0.43 | 6.14 ± 0.35 |
| SCSM | −0.64 ± 0.31 | 8.65 ± 0.30 | YNMZ | −0.67 ± 0.33 | 7.77 ± 0.33 |
| SCXC | 0.75 ± 0.36 | 7.82 ± 0.29 | YNRL | 0.70 ± 0.71 | 10.76 ± 0.47 |
| SCXD | −0.13 ± 0.32 | 8.08 ± 0.30 | YNSD | −0.66 ± 0.38 | 10.39 ± 0.36 |
| SCYX | −1.66 ± 0.28 | 6.25 ± 0.28 | YNTC | −0.25 ± 0.69 | 10.50 ± 0.52 |
| SCYY | −1.35 ± 0.23 | 7.84 ± 0.23 | YNTH | 0.33 ± 0.39 | 6.72 ± 0.36 |
| XIAG | −1.28 ± 0.57 | 3.60 ± 0.52 | YNWS | 1.63 ± 0.64 | 5.41 ± 0.41 |
| YNCX | −0.65 ± 0.39 | 7.39 ± 0.35 | YNXP | −1.52 ± 0.55 | 4.83 ± 0.47 |
| YNDC | −0.81 ± 0.47 | 6.32 ± 0.44 | YNYA | −0.31 ± 0.29 | 8.46 ± 0.28 |
| YNGM | −0.70 ± 1.04 | 2.44 ± 0.82 | YNYL | −4.43 ± 1.28 | 8.90 ± 0.86 |
| YNJD | 0.58 ± 0.40 | 10.37 ± 0.39 | YNYM | −0.18 ± 0.38 | 8.71 ± 0.35 |
| YNJP | −1.06 ± 0.57 | 6.70 ± 0.46 | YNYS | −0.45 ± 0.27 | 9.74 ± 0.27 |
| Mean | −0.55 | 7.56 |
| Mean Bias1 (cm) | Mean Bias2 (cm) | Mean Uncertainty (cm) | RMSR1 (cm) | RMSR2 (cm) | Discrepancy Ratio1 | Discrepancy Ratio2 | |
|---|---|---|---|---|---|---|---|
| HVCE without constraint | 6.24 | 7.49 | 0.46 | 1.08 | 0.54 | 0.74 | |
| HVCE GRACE constraint | 3.00 | 4.50 | 0.20 | 1.52 | 0.68 | 0.26 | 0.44 |
| HVCE GLDAS constraint | 2.28 | 3.79 | 0.26 | 1.67 | 3.01 | 0.20 | 0.37 |
| TR without constraint | 4.11 | 5.62 | 0.42 | 1.44 | 0.35 | 0.55 | |
| TR GRACE constraint | 2.08 | 3.61 | 0.11 | 2.04 | 0.74 | 0.18 | 0.36 |
| TR GLDAS constraint | 2.58 | 4.05 | 0.18 | 3.59 | 1.57 | 0.22 | 0.40 |
| ABIC without constraint | 3.99 | 5.41 | 0.43 | 1.90 | 0.34 | 0.53 | |
| ABIC GRACE constraint | 2.69 | 4.18 | 0.39 | 1.94 | 1.03 | 0.23 | 0.41 |
| ABIC GLDAS constraint | 2.18 | 3.68 | 0.39 | 2.00 | 2.80 | 0.19 | 0.36 |
| HVCE | TR | ABIC | |
|---|---|---|---|
| Without Constraint | 8.42 × 10−4 | 1.16 × 10−4 | 1.53 × 10−4 |
| GRACE Constraint | 8.61× 10−4 | 3.88 × 10−4 | 1.91 × 10−4 |
| GLDAS Constraint | 3.49 × 10−4 | 2.08 × 10−4 | 2.62 × 10−4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Fok, H.S.; Tenzer, R.; Chen, Q.; Chen, X. Akaike’s Bayesian Information Criterion for the Joint Inversion of Terrestrial Water Storage Using GPS Vertical Displacements, GRACE and GLDAS in Southwest China. Entropy 2019, 21, 664. https://doi.org/10.3390/e21070664
Liu Y, Fok HS, Tenzer R, Chen Q, Chen X. Akaike’s Bayesian Information Criterion for the Joint Inversion of Terrestrial Water Storage Using GPS Vertical Displacements, GRACE and GLDAS in Southwest China. Entropy. 2019; 21(7):664. https://doi.org/10.3390/e21070664
Chicago/Turabian StyleLiu, Yongxin, Hok Sum Fok, Robert Tenzer, Qiang Chen, and Xiuwan Chen. 2019. "Akaike’s Bayesian Information Criterion for the Joint Inversion of Terrestrial Water Storage Using GPS Vertical Displacements, GRACE and GLDAS in Southwest China" Entropy 21, no. 7: 664. https://doi.org/10.3390/e21070664
APA StyleLiu, Y., Fok, H. S., Tenzer, R., Chen, Q., & Chen, X. (2019). Akaike’s Bayesian Information Criterion for the Joint Inversion of Terrestrial Water Storage Using GPS Vertical Displacements, GRACE and GLDAS in Southwest China. Entropy, 21(7), 664. https://doi.org/10.3390/e21070664