Asynchronous Control of P300-Based Brain–Computer Interfaces Using Sample Entropy




Abstract
:1. Introduction
2. Materials and Methods
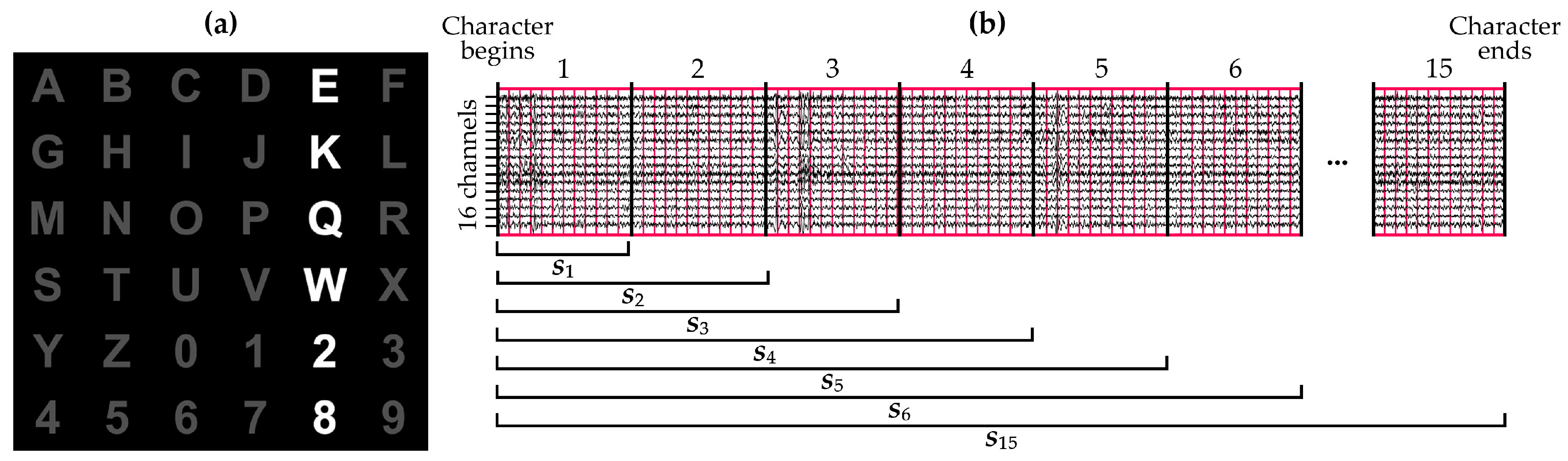
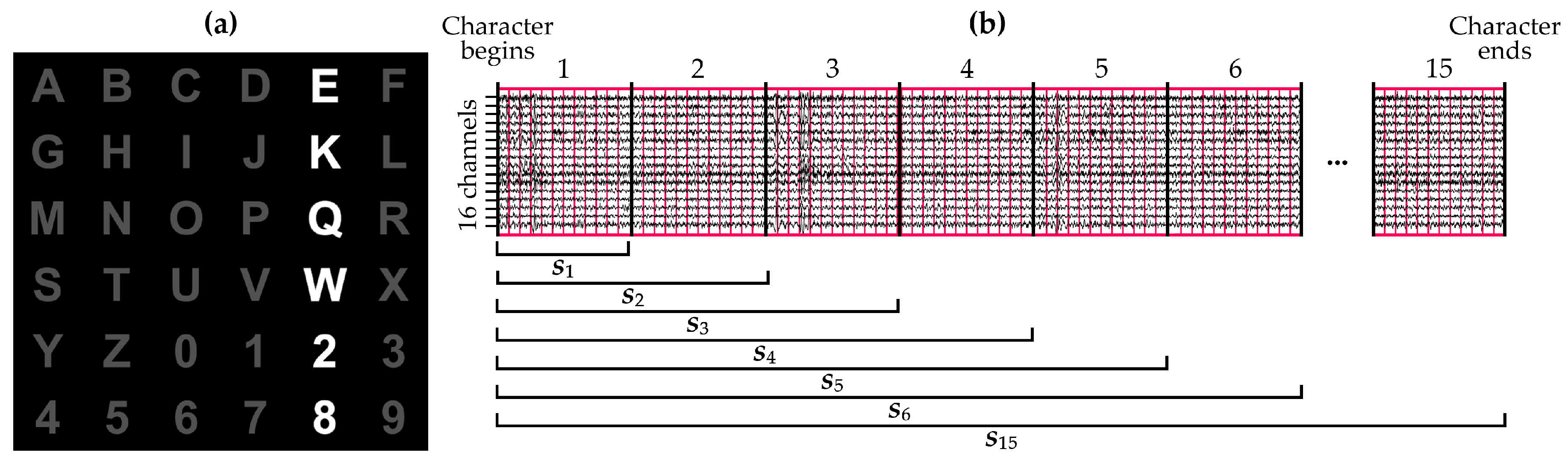
2.1. Dataset and Experimental Protocol
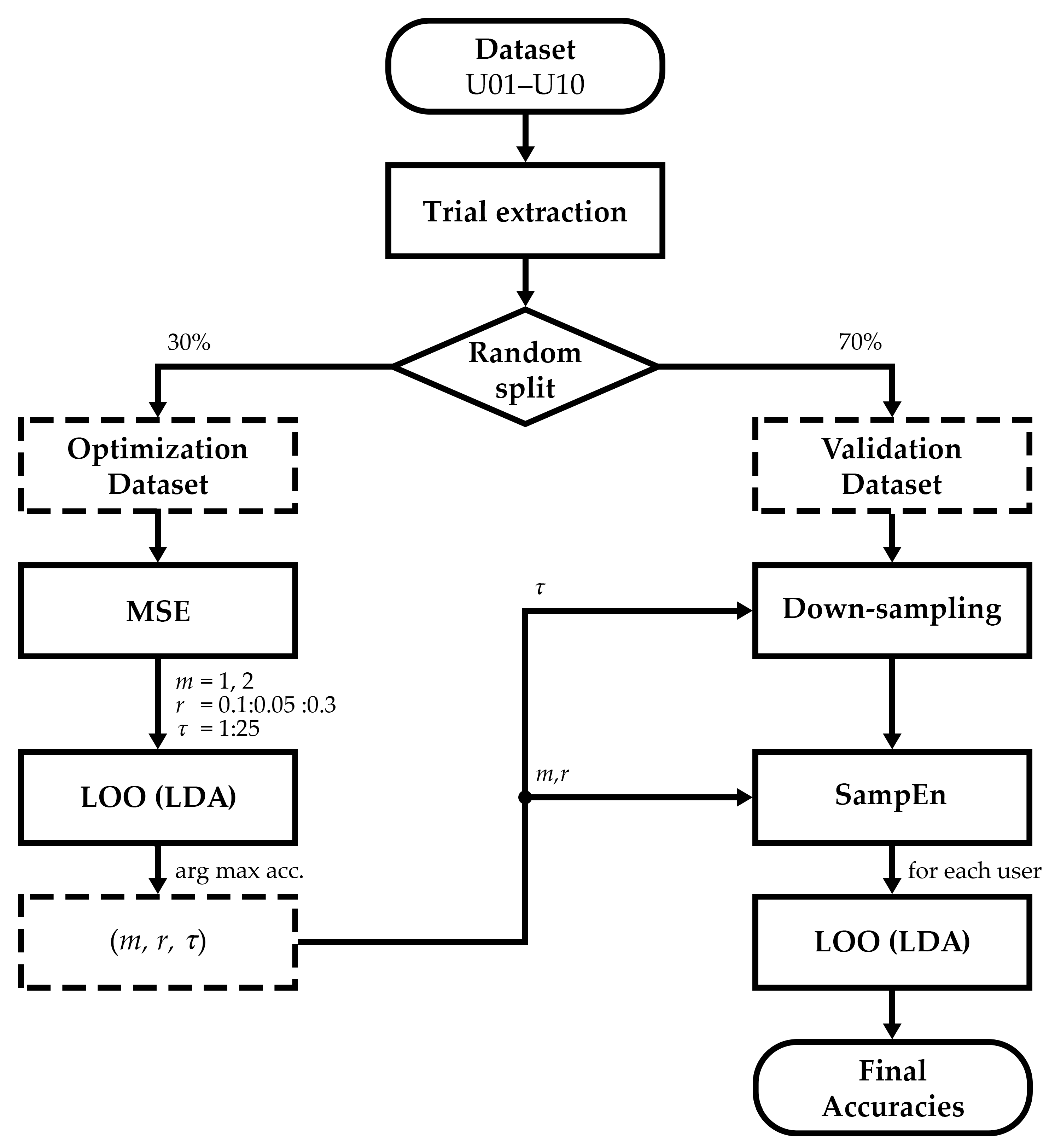
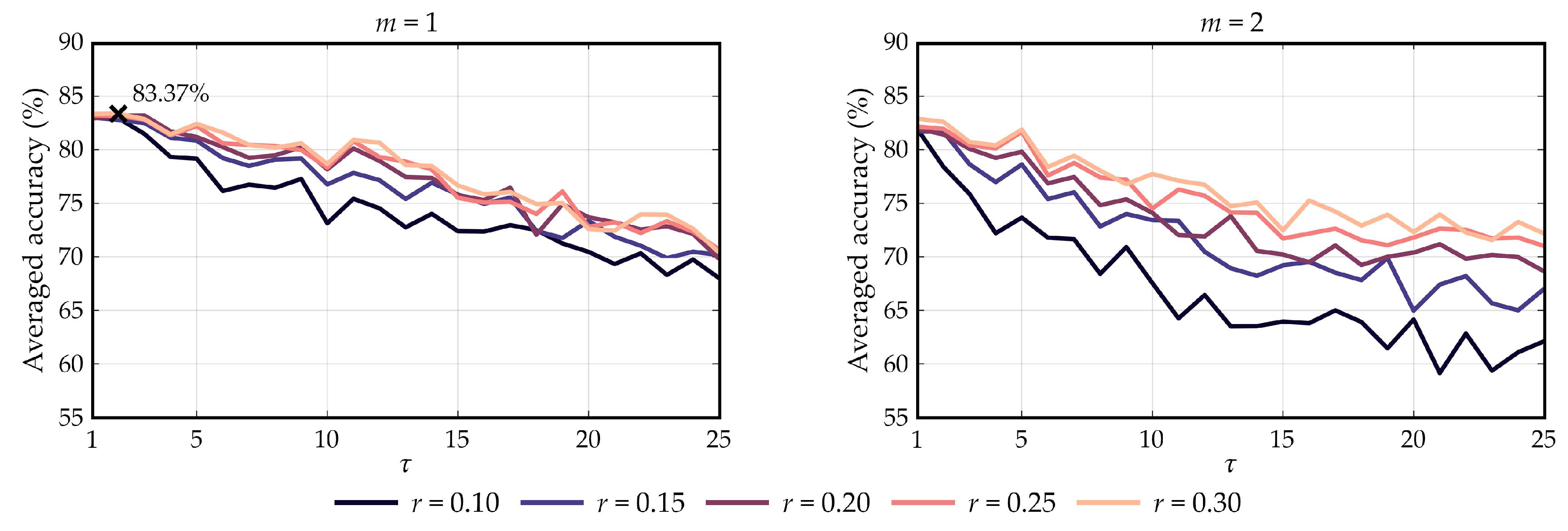
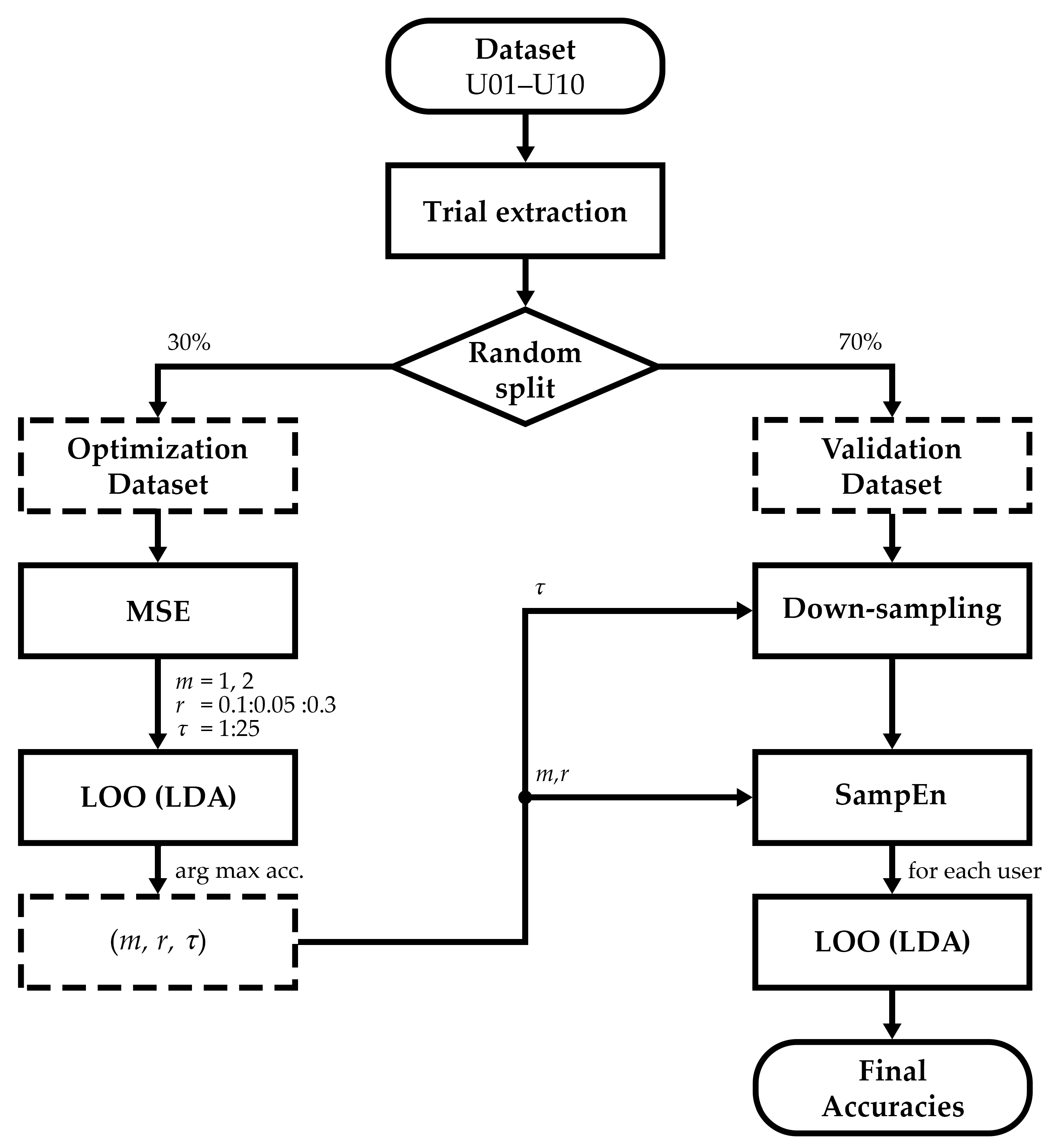
2.2. Optimization Stage
2.3. Validation Stage
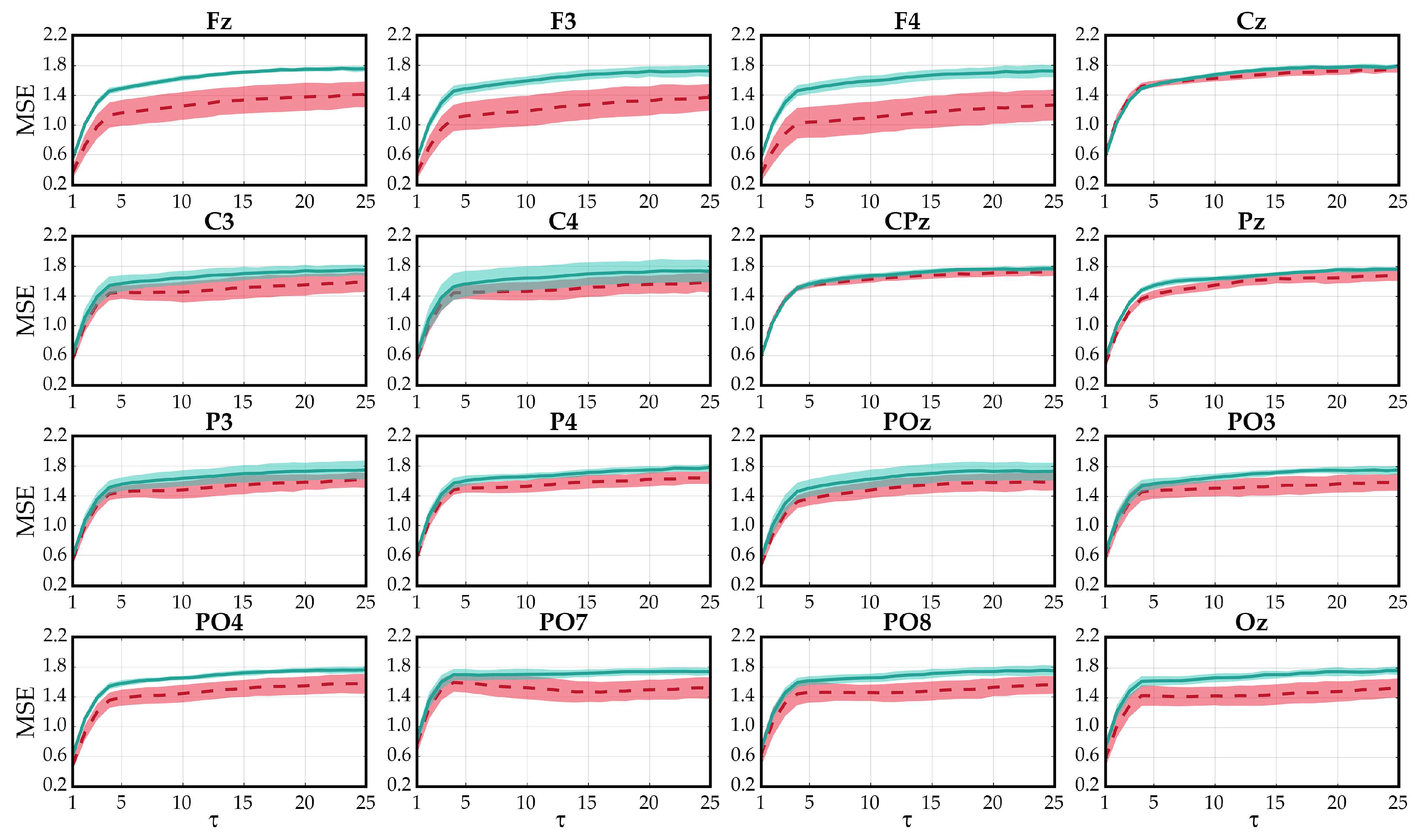
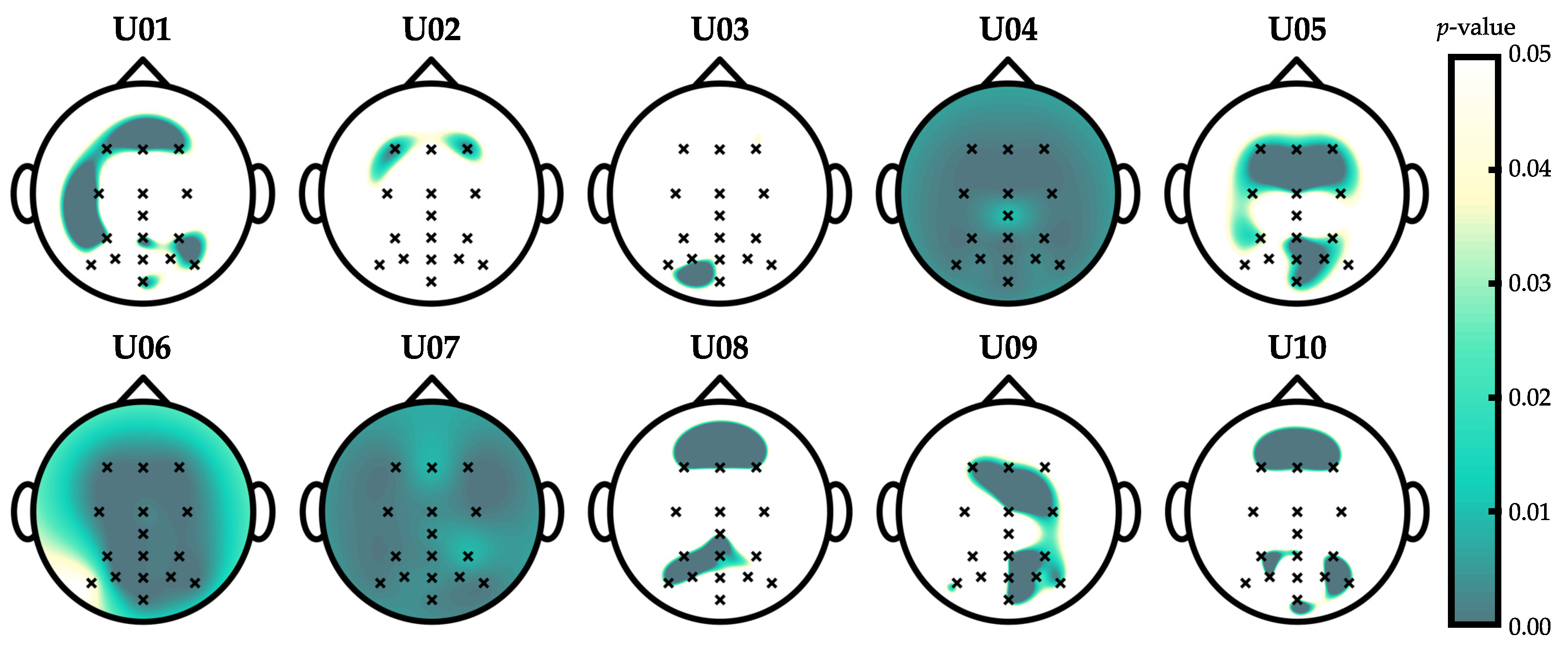
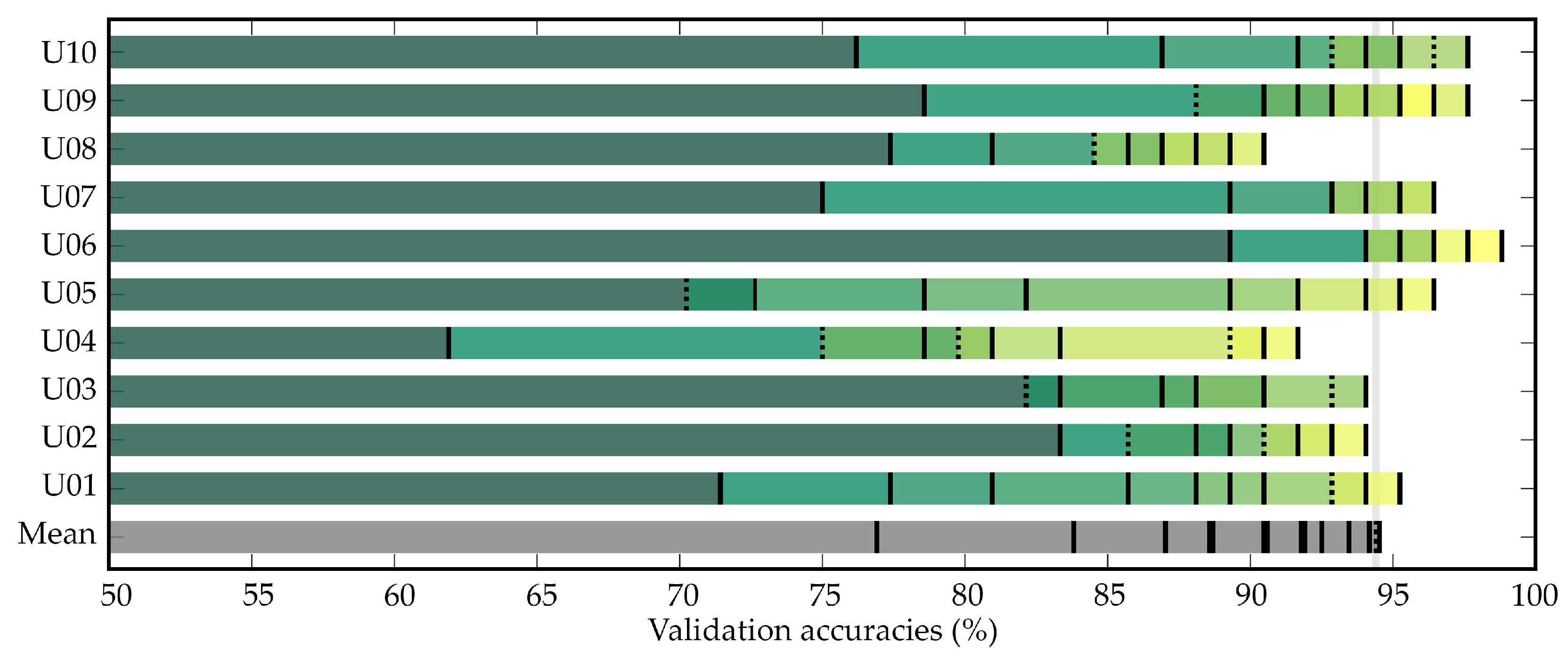
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wolpaw, J.R.; Wolpaw, E.W. Brain–computer Interfaces: Principles and Practice; OUP USA: Oxford, UK, 2012. [Google Scholar]
- Wolpaw, J.R.; Birbaumer, N.; McFarland, D.J.; Pfurtscheller, G.; Vaughan, T.M. Brain–computer interfaces for communication and control. Clin. Neurophysiol. 2002, 113, 767–791. [Google Scholar] [CrossRef]
- Nicolas-Alonso, L.F.; Gomez-Gil, J. Brain computer interfaces, a review. Sensors 2012, 12, 1211–1279. [Google Scholar] [CrossRef] [PubMed]
- Farwell, L.A.; Donchin, E. Talking off the top of your head: Toward a mental prosthesis utilizing event-related brain potentials. Electroencephalogr. Clin. Neurophysiol. 1988, 70, 510–523. [Google Scholar] [CrossRef]
- Pinegger, A.; Faller, J.; Halder, S.; Wriessnegger, S.C.; Müller-Putz, G.R. Control or non-control state: That is the question! An asynchronous visual P300-based BCI approach. J. Neural Eng. 2015, 12, 014001. [Google Scholar] [CrossRef] [PubMed]
- Martínez-Cagigal, V.; Gomez-Pilar, J.; Álvarez, D.; Hornero, R. An asynchronous P300-based Brain— Computer Interface web browser for severely disabled people. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1332–1342. [Google Scholar] [CrossRef] [PubMed]
- Pfurtscheller, G. The hybrid BCI. Front. Neurosci. 2010, 4, 30. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Guan, C.; Wang, C. Asynchronous P300-based brain–computer interfaces: A computational approach with statistical models. IEEE Trans. Biomed. Eng. 2008, 55, 1754–1763. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Pan, J.; Wang, F.; Yu, Z. A hybrid BCI system combining P300 and SSVEP and its application to wheelchair control. IEEE Trans. Biomed. Eng. 2013, 60, 3156–3166. [Google Scholar] [CrossRef] [PubMed]
- He, S.; Zhang, R.; Wang, Q.; Chen, Y.; Yang, T.; Feng, Z.; Zhang, Y.; Shao, M.; Li, Y. A P300-Based Threshold-Free Brain Switch and Its Application in Wheelchair Control. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 715–725. [Google Scholar] [CrossRef] [PubMed]
- Aloise, F.; Schettini, F.; Aricò, P.; Leotta, F.; Salinari, S.; Mattia, D.; Babiloni, F.; Cincotti, F. P300-based brain–computer interface for environmental control: An asynchronous approach. J. Neural Eng. 2011, 8, 025025. [Google Scholar] [CrossRef] [PubMed]
- Aref, A.; Huggins, J. The P300-certainty algorithm: Improving accuracy by withholding erroneous selections. In Proceedings of the EEG and Clinical Neuroscience Society Conference, Bristol, TN, USA, 12–15 September 2012. [Google Scholar]
- Breitwieser, C.; Pokorny, C.; Müller-Putz, G.R. A hybrid three-class brain–computer interface system utilizing SSSEPs and transient ERPs. J. Neural Eng. 2016, 13, 066015. [Google Scholar] [CrossRef] [PubMed]
- Alcaide-Aguirre, R.E.; Warschausky, S.A.; Brown, D.; Aref, A.; Huggins, J.E. Asynchronous brain–computer interface for cognitive assessment in people with cerebral palsy. J. Neural Eng. 2017, 14, 066001. [Google Scholar] [CrossRef] [PubMed]
- Tang, J.; Liu, Y.; Jiang, J.; Yu, Y.; Hu, D.; Zhou, Z. Toward Brain-Actuated Mobile Platform. Int. J. Hum. Comput. Interact. 2018. [Google Scholar] [CrossRef]
- Martínez-Cagigal, V.; Santamaría-Vázquez, E.; Gomez-Pilar, J.; Hornero, R. Towards an accessible use of smartphone-based social networks through brain–computer interfaces. Expert Syst. Appl. 2019, 120, 155–166. [Google Scholar] [CrossRef]
- Panicker, R.C.; Puthusserypady, S.; Pryana, A.P.; Sun, Y. Asynchronous P300 BCI: SSVEP-based control state detection. Eur. Signal Process. Conf. 2010, 58, 934–938. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Zhou, Z.; Liu, Y.; Jiang, J.; Yin, E.; Zhang, N.; Wang, Z.; Liu, Y.; Wu, X.; Hu, D. Self-paced operation of a wheelchair based on a hybrid brain–computer interface combining motor imagery and P300 potential. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 2516–2526. [Google Scholar] [CrossRef] [PubMed]
- Martínez-Cagigal, V.; Santamaría Vázquez, E.; Hornero, R. A Novel Hybrid Swarm Algorithm for P300-Based BCI Channel Selection. In Proceedings of the World Congress on Medical Physics & Biomedical Engineering (IUPESM 2018), Prague, Czech Republic, 3–8 June 2018; pp. 41–45. [Google Scholar]
- Aydin, E.A.; Bay, O.F.; Guler, I. P300-Based Asynchronous Brain Computer Interface for Environmental Control System. IEEE J. Biomed. Health Inform. 2018, 22, 653–663. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Qiu, T. Quasi-periodic fluctuation in Donchin’s speller signals and its potential use for asynchronous control. Biomed. Tech. 2018, 63, 105–112. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Zhou, Z.; Jiang, J.; Yin, E.; Liu, K.; Wang, J.; Liu, Y.; Hu, D. Toward a Hybrid BCI: Self-Paced Operation of a P300-based Speller by Merging a Motor Imagery-Based “Brain Switch” into a P300 Spelling Approach. Int. J. Hum. Comput. Interact. 2017, 33, 623–632. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef] [PubMed]
- Costa, M.; Goldberder, A.L.; Peng, C.K. Multiscale Entropy Analysis of Complex Physiologic Time Series. Phys. Rev. Lett. 2002, 89, 068102. [Google Scholar] [CrossRef] [PubMed]
- Costa, M.; Goldberger, A.L.; Peng, C.K. Multiscale entropy analysis of biological signals. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2005, 71, 1–18. [Google Scholar] [CrossRef] [PubMed]
- Humeau-Heurtier, A. The multiscale entropy algorithm and its variants: A review. Entropy 2015, 17, 3110–3123. [Google Scholar] [CrossRef]
- Picton, T.W. The P300 wave of the human event-related potential. J. Clin. Neurophysiol. 1992, 9, 456–479. [Google Scholar] [CrossRef] [PubMed]
- Jasper, H.H. The ten-twenty electrode system of the international federation. Electroencephalogr. Clin. Neurophysiol. 1958, 10, 371–375. [Google Scholar]
- Valencia, F.; Porta, A.; Clari, F. Refined Multiscale Entropy: Application to 24-h Holter Recordings of Heart Period Variability in Healthy and Aortic Stenosis Subjects. IEEE Trans. Biomed. Eng. 2009, 56, 2202–2213. [Google Scholar] [CrossRef] [PubMed]
- Witten, I.H.; Frank, E. Data Mining: Practical Machine Learning Tools and Techniques, 3rd ed.; Morgan Kaufmann: Burlington, MA, USA, 2011. [Google Scholar]
- Benjamini, Y.; Hochberg, Y. Controlling the False Discovery Rate: A Practical and Powerful Approach to Multiple Testing. J. R. Stat. Soc. 1995, 57, 289–300. [Google Scholar] [CrossRef]
- Lebedev, M.A.; Messinger, A.; Kralik, J.D.; Wise, S.P. Representation of attended versus remembered locations in prefrontal cortex. PLoS Biol. 2004, 2, e365. [Google Scholar] [CrossRef] [PubMed]
- Huettel, S.A.; McCarthy, G. What is odd in the oddball task? Prefrontal cortex is activated by dynamic changes in response strategy. Neuropsychologia 2004, 42, 379–386. [Google Scholar] [CrossRef] [PubMed]
- Bojorges-Valdez, E.; Yanez-Suarez, O. Association between EEG spectral power dynamics and event related potential amplitude on a P300 speller. Biomed. Phys. Eng. Express 2018, 4. [Google Scholar] [CrossRef]
- Goodale, M.A.; Ingle, D.J.; Mansfield, R.J.W. Analysis of Visual Behavior; Mit Press: Cambridge, MA, USA, 1982. [Google Scholar]
- Srinivasan, R.; Bibi, F.A.; Nunez, P.L. Steady-state visual evoked potentials: Distributed local sources and wave-like dynamics are sensitive to flicker frequency. Brain Topogr. 2006, 18, 167–187. [Google Scholar] [CrossRef] [PubMed]
- Schalk, G.; McFarland, D.J.; Hinterberger, T.; Birbaumer, N.; Wolpaw, J.R. BCI2000: A general-purpose brain–computer interface (BCI) system. IEEE Trans. Biomed. Eng. 2004, 51, 1034–1043. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| U01 | 71.43% | 77.38% | 80.95% | 85.71% | 88.10% | 88.10% | 89.29% | 90.48% | 94.05% | 94.05% | 92.86% | 92.86% | 94.05% | 95.24% | 94.05% |
| U02 | 83.33% | 88.10% | 89.29% | 85.71% | 89.29% | 89.29% | 91.67% | 91.67% | 91.67% | 90.48% | 92.86% | 91.67% | 92.86% | 94.05% | 92.86% |
| U03 | 83.33% | 82.14% | 88.10% | 83.33% | 86.90% | 90.48% | 88.10% | 90.48% | 94.05% | 92.86% | 92.86% | 92.86% | 92.86% | 92.86% | 92.86% |
| U04 | 61.90% | 78.57% | 80.95% | 75.00% | 75.00% | 75.00% | 80.95% | 80.95% | 79.76% | 80.95% | 83.33% | 90.48% | 89.29% | 91.67% | 91.67% |
| U05 | 72.62% | 70.24% | 72.62% | 78.57% | 78.57% | 82.14% | 89.29% | 89.29% | 91.67% | 91.67% | 91.67% | 94.05% | 95.24% | 96.43% | 96.43% |
| U06 | 89.29% | 94.05% | 96.43% | 96.43% | 95.24% | 94.05% | 96.43% | 95.24% | 94.05% | 95.24% | 96.43% | 96.43% | 96.43% | 97.62% | 98.81% |
| U07 | 75.00% | 89.29% | 92.86% | 95.24% | 96.43% | 96.43% | 95.24% | 95.24% | 92.86% | 94.05% | 95.24% | 95.24% | 96.43% | 96.43% | 95.24% |
| U08 | 77.38% | 80.95% | 85.71% | 86.90% | 86.90% | 88.10% | 86.90% | 84.52% | 89.29% | 89.29% | 86.90% | 89.29% | 90.48% | 89.29% | 89.29% |
| U09 | 78.57% | 90.48% | 91.67% | 88.10% | 94.05% | 90.48% | 92.86% | 95.24% | 95.24% | 92.86% | 95.24% | 95.24% | 97.62% | 95.24% | 96.43% |
| U10 | 76.19% | 86.90% | 91.67% | 95.24% | 95.24% | 92.86% | 94.05% | 92.86% | 95.24% | 97.62% | 97.62% | 96.43% | 96.43% | 96.43% | 96.43% |
| Mean | 76.90% | 83.81% | 87.02% | 87.02% | 88.57% | 88.69% | 90.48% | 90.60% | 91.79% | 91.90% | 92.50% | 93.45% | 94.17% | 94.52% | 94.40% |
| SD | 7.58% | 7.23% | 7.11% | 7.13% | 7.23% | 6.18% | 4.59% | 4.74% | 4.61% | 4.52% | 4.38% | 2.46% | 2.77% | 2.58% | 2.81% |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | 0.82 | 3.46 | 8.24 | 14.64 | 22.57 | 32.51 | 43.66 | 54.92 | 69.70 | 86.33 | 104.87 | 125.24 | 146.41 | 170.58 | 196.78 |
| SD | 0.99 | 0.28 | 0.82 | 1.03 | 1.40 | 2.00 | 3.10 | 3.30 | 3.84 | 4.69 | 5.56 | 5.96 | 6.50 | 7.20 | 8.64 |
| Study | Control Signal | Experimental Paradigm | Asynchrony Technique | No. Subjects |
|---|---|---|---|---|
| Zhang et al., 2008 [8] | P300 | Single cell | ROC thresholding using SVM scores | 4 CS |
| Panicker et al., 2010 [17] | P300 and SSVEP | Hybrid: RCP-based | Detection of SSVEPs using relative peak amplitude in PSD | 10 CS |
| Aloise et al., 2011 [11] | P300 | RCP | ROC thresholding using LDA scores | 11 CS |
| Li et al., 2013 [9] | P300 & SSVEP | Hybrid: oddball & SSVEP | ROC thresholding using SVM scores (P300) and relative powers (SSVEP) | 8 CS |
| Pinegger et al., 2015 [5] | P300 | RCP | Thresholding using LDA scores and sum of spectral components | 10 CS |
| Breitwieser et al., 2016 [13] | P300 and SSSEP | Hybrid: tactile & oddball | Thresholding using multi-class LDA | 14 CS |
| Martínez-Cagigal et al., 2017 [6] | P300 | RCP | ROC thresholding using LDA scores | 5 CS, 16 MS |
| He [10] | P300 | RCP | Combination of two different SVM | 8 CS |
| Yu et al., 2017 [18,22] | P300 and MI | MI monitoring & RCP | MI signal activates the RCP | 11 CS, 8 CS |
| Alcaide-Aguirre et al., 2017 [12,14] | P300 | RCP | Certainty algorithm: t-test over LDA scores | 11 CS, 19 CP |
| Ma & Qiu, 2018 [21] | P300 | RCP | ROC thresholding using relative powers | 4 CS |
| Aydin et al., 2018 [20] | P300 | Hex-o-Spell | ROC thresholding using classifier labels | 10 CS |
| Tang et al., 2018 [15] | P300 | RCP | ROC thresholding using LDA scores | 4 CS |
| Martínez-Cagigal et al., 2019 [16] | P300 | RCP | ROC thresholding using LDA scores | 18 CS, 10 MD |
| Present study | P300 | RCP | LDA classification using SampEn features | 10 CS |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martínez-Cagigal, V.; Santamaría-Vázquez, E.; Hornero, R. Asynchronous Control of P300-Based Brain–Computer Interfaces Using Sample Entropy. Entropy 2019, 21, 230. https://doi.org/10.3390/e21030230
Martínez-Cagigal V, Santamaría-Vázquez E, Hornero R. Asynchronous Control of P300-Based Brain–Computer Interfaces Using Sample Entropy. Entropy. 2019; 21(3):230. https://doi.org/10.3390/e21030230
Chicago/Turabian StyleMartínez-Cagigal, Víctor, Eduardo Santamaría-Vázquez, and Roberto Hornero. 2019. "Asynchronous Control of P300-Based Brain–Computer Interfaces Using Sample Entropy" Entropy 21, no. 3: 230. https://doi.org/10.3390/e21030230
APA StyleMartínez-Cagigal, V., Santamaría-Vázquez, E., & Hornero, R. (2019). Asynchronous Control of P300-Based Brain–Computer Interfaces Using Sample Entropy. Entropy, 21(3), 230. https://doi.org/10.3390/e21030230