Adaptive Synchronization of Fractional-Order Complex Chaotic system with Unknown Complex Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Main Results
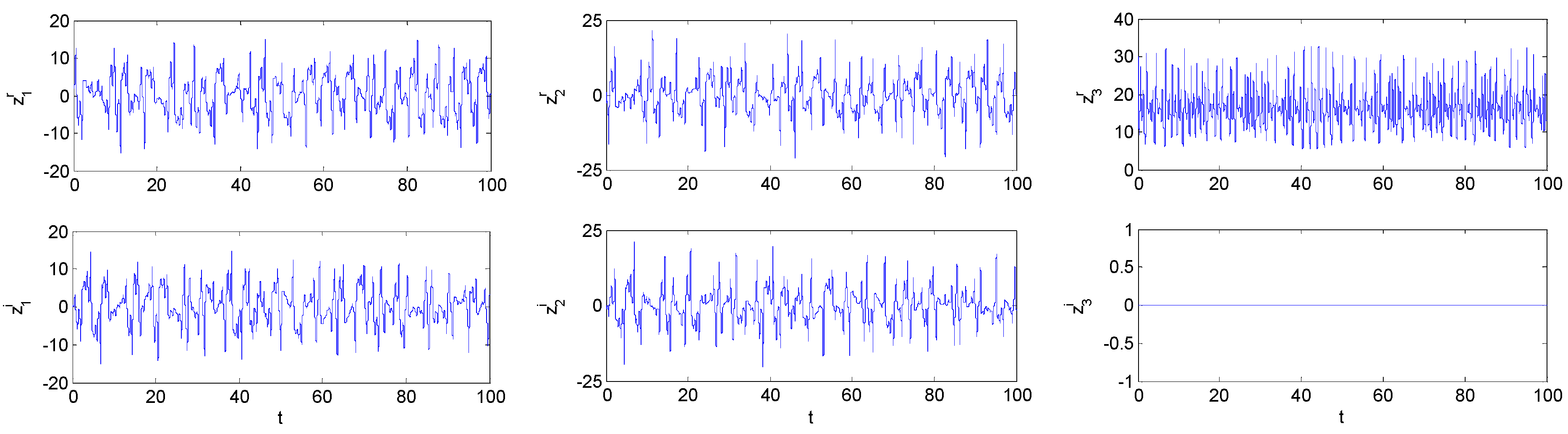
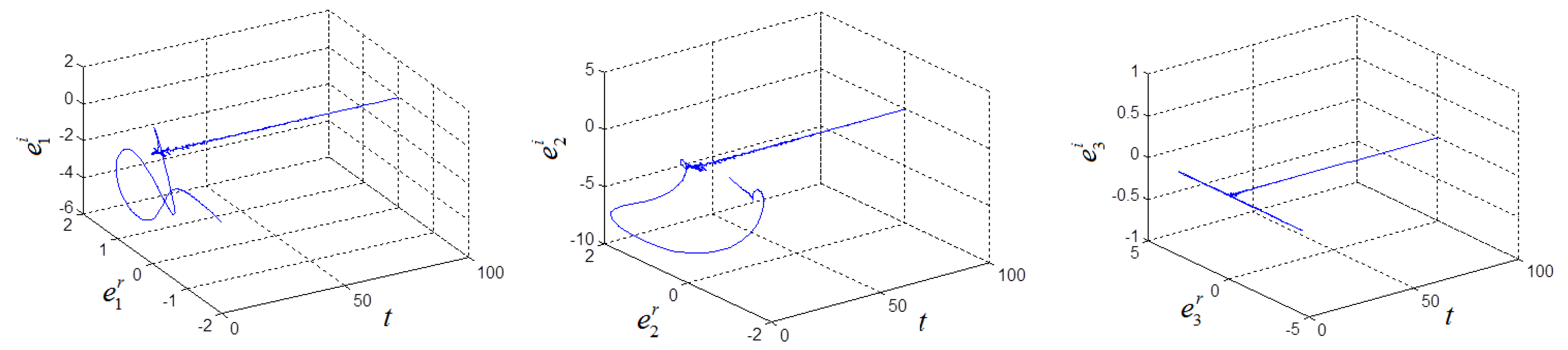
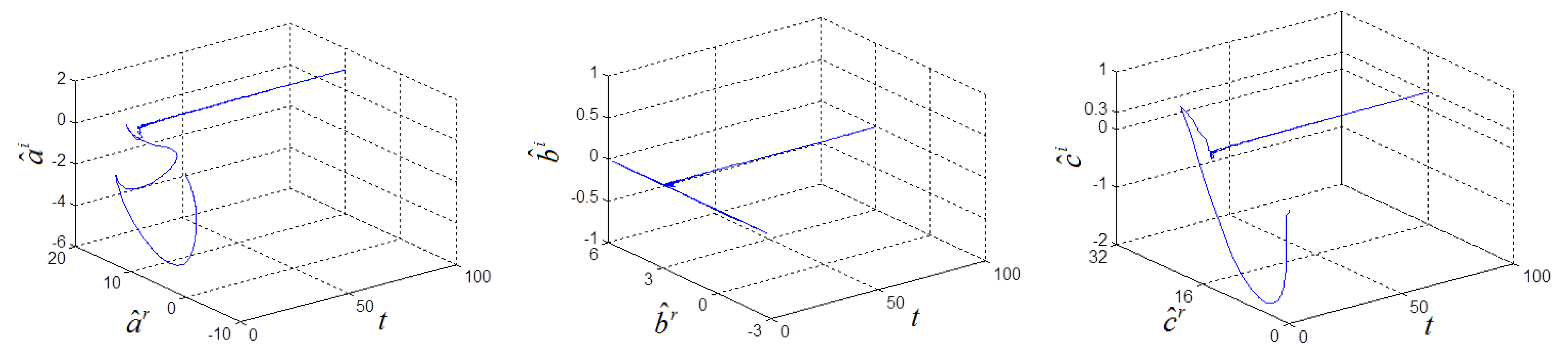
4. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Gorenlo, R.; Mainardi, F. Fractional Calculus; Springer: Berlin, Germany, 1997. [Google Scholar]
- Caponetto, R. Fractional Order Systems: Modeling and Control Applications; World Scientiic: Singapore, 2010. [Google Scholar]
- Magin, R.L. Fractional Calculus in Bioengineering; Begell House Redding: New York, NY, USA, 2006. [Google Scholar]
- Radwan, A.G.; Shamim, A.; Salama, K.N. Theory of fractional order elements based impedance matching networks. IEEE Microwave Wirel. Comp. Lett. 2011, 21, 120–122. [Google Scholar] [CrossRef]
- Radwan, A.G.; Abd-El-Haiz, S.K.; Abdelhaleem, S.H. Image encryption in the fractional-order domain. In Proceedings of the 1st International Conference on Engineering and Technology, Cairo, Egypt, 10–11 October 2012. [Google Scholar]
- Kiani-B, A.; Fallah, K.; Pariz, N.; Leung, H. A chaotic secure communication scheme using fractional chaotic systems based on an extended fractional Kalman filter. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 863–879. [Google Scholar] [CrossRef]
- Li, G.J.; Liu, H. Stability analysis and synchronization for a class of fractional-order neural networks. Entropy 2016, 18, 55. [Google Scholar] [CrossRef]
- Yin, C.; Cheng, Y.; Zhong, S.M.; Bai, Z. Fractional-order switching type control law design for adaptive sliding mode technique of 3D fractional-order nonlinear systems. Complexity 2016, 21, 363–373. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.G.; Wang, H.X.; Huo, Y.H.; Luo, J.H. Adaptive synchronization for a class of uncertain fractional-order neural networks. Entropy 2015, 17, 7185–7200. [Google Scholar] [CrossRef]
- Lu, J.G. Chaotic dynamics of the fractional-order Lü system and its synchronization. Phys. Lett. A 2006, 354, 305–311. [Google Scholar] [CrossRef]
- Li, C.G.; Chen, G.R. Chaos in the fractional-order Chen system and it’s control. Chaos Solitons Fractals 2004, 22, 549–554. [Google Scholar] [CrossRef]
- Agrawal, S.K.; Srivastava, M.; Das, S. Synchronization of fractional order chaotic systems using active control method. Chaos Solitons Fractals 2012, 45, 737–752. [Google Scholar] [CrossRef]
- Chen, L.P.; Chai, Y.; Wu, R.C. Lag projective synchronization in fractional-order chaotic (hyperchaotic) systems. Phys. Lett. A 2011, 375, 2099–2110. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, J. Chaotic synchronization and anti-synchronization based on suitable separation. Phys. Lett. A 2004, 330, 442–447. [Google Scholar] [CrossRef]
- Zhang, R.X.; Yang, S.P. Robust synchronization of two different fractional-order chaotic systems with unknown parameters using adaptive sliding mode approach. Nonlinear Dyn. 2013, 71, 269–278. [Google Scholar] [CrossRef]
- Zhang, R.X.; Yang, S.P. Adaptive synchronization of fractional-order chaotic systems via a single driving variable. Nonlinear Dyn. 2011, 66, 831–837. [Google Scholar] [CrossRef]
- Zhang, R.X.; Yang, S.P. Robust chaos synchronization of fractional-order chaotic systems with unknown parameters and uncertain perturbations. Nonlinear Dyn. 2012, 69, 983–992. [Google Scholar] [CrossRef]
- Wang, S.; Wang, X.; Han, B. Complex generalized synchronization and parameter identification of nonidentical nonlinear complex systems. PLoS ONE 2016, 11, e0152099. [Google Scholar] [CrossRef] [PubMed]
- Jiang, C.; Zhang, F.; Li, T. Synchronization and anti-synchronization of N-coupled fractional-order complex chaotic systems with ring connection. Math. Meth. Appl. Sci. 2018, 41, 2625–2638. [Google Scholar] [CrossRef]
- Zhang, F.F.; Liu, S. Self-time-delay synchronization of time-delay coupled complex chaotic system and its applications to communication. Int. J. Mod. Phys. C 2014, 25, 559–583. [Google Scholar] [CrossRef]
- Luo, C.; Wang, X.Y. Chaos in the fractional-order complex Lorenz system and its synchronization. Nonlinear Dyn. 2013, 71, 241–257. [Google Scholar] [CrossRef]
- Luo, C.; Wang, X. Chaos generated from the fractional-order complex Chen system and its application to digital secure communication. Int. J. Mod. Phys. C 2013, 24, 72–77. [Google Scholar] [CrossRef]
- Liu, X.J.; Hong, L.; Yang, L.X. Fractional-order complex T system: Bifurcations, chaos control, and synchronization. Nonlinear Dyn. 2014, 75, 589–602. [Google Scholar] [CrossRef]
- Zhang, W.W.; Cao, J.D.; Chen, D.Y.; Alsaadi, F.E. Synchronization in fractional-order complex-valued delayed neural networks. Entropy 2018, 20, 54. [Google Scholar] [CrossRef]
- Li, L.; Wang, Z.; Lu, J.W.; Li, Y.X. Adaptive synchronization of fractional-order complex-valued neural networks with discrete and distributed delays. Entropy 2018, 20, 124. [Google Scholar] [CrossRef]
- Sun, J.; Deng, W.; Cui, G.Z.; Wang, Y.F. Real combination synchronization of three fractional-order complex-variable chaotic systems. Optik 2016, 127, 11460–11468. [Google Scholar] [CrossRef]
- Yadav, V.K.; Srikanth, N.; Das, S. Dual function projective synchronization of fractional order complex chaotic systems. Optik 2016, 127, 10527–10538. [Google Scholar] [CrossRef]
- Nian, F.Z.; Liu, X.M.; Zhang, Y. Sliding mode synchronization of fractional-order complex chaotic system with parametric and external disturbances. Chaos Solitons Fractals 2018, 116, 22–28. [Google Scholar] [CrossRef]
- Jiang, C.M.; Liu, S.T.; Zhang, F.F. Complex modified projective synchronization for fractional-order chaotic complex systems. Int. J. Auto Comput. 2017, 15, 603–615. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simulat. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Quan, X.; Zhuang, S.; Liu, S.; Xiao, J. Decentralized adaptive coupling synchronization of fractional-order complex-variable dynamical networks. Neurocomputing 2016, 186, 119–126. [Google Scholar]
- Zhang, R.X.; Liu, Y. A new Barbalat’s Lemma and Lyapunov stability theorem for fractional order systems. In Proceedings of the 29th Chinese Control and Decision Conference, Chongqing, China, 28–30 May 2017; pp. 3676–3681. [Google Scholar]
- Wang, F.; Yang, Y.Q. Fractional order Barbalat’s Lemma and its applications in the stability of fractional order nonlinear systems. Math. Model. Anal. 2017, 22, 503–513. [Google Scholar] [CrossRef]
- Wang, C. Adaptive fuzzy control for uncertain fractional-order financial chaotic systems subjected to input saturation. PLoS ONE 2016, 11, e0164791. [Google Scholar] [CrossRef]
- Xu, Q.; Xu, X.H.; Zhuang, S.X.; Xiao, J.X.; Song, C.H. New complex projective synchronization strategies for drive-response networks with fractional complex-variable dynamics. Appl. Math. Comput. 2018, 338, 552–566. [Google Scholar] [CrossRef]
- Tao, F.; Sun, J.T. Stability of complex-valued impulsive system with delay. Appl. Math. Comput. 2014, 240, 102–108. [Google Scholar]
- Wu, Z.Y.; Chen, G.R.; Fu, X.C. Synchronization of a network coupled with complex-variable chaotic systems. Chaos 2012, 22, 023127. [Google Scholar] [CrossRef]
- Gu, Y.; Yu, Y.; Wang, H. Synchronization-based parameter estimation of fractional-order neural networks. Physica A Stat. Mech. Appl. 2017, 483, 351–361. [Google Scholar] [CrossRef]
- Diethelm, K.; Neville, J.F.; Freed, A.D. A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn. 2002, 29, 1–4. [Google Scholar] [CrossRef]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov exponents from a time series. Physica D 1985, 16, 285–317. [Google Scholar] [CrossRef]
- Carbajal-Gomez, V.H.; Tlelo-Cuautle, E.; Muñoz-Pacheco, J.M.; de la Fraga, L.G.; Sanchez-Lopez, C.; Fernandez-Fernandez, F.V. Optimization and CMOS design of chaotic oscillators robust to PVT variations: INVITED (In Press). Integration 2018. [Google Scholar] [CrossRef]
- Pano-Azucena, A.D.; Tlelo-Cuautle, E.; Rodriguez-Gomez, G. de la Fraga, L.G. FPGA-based implementation of chaotic oscillators by applying the numerical method based on trigonometric polynomials. AIP Adv. 2018, 8, 075217. [Google Scholar] [CrossRef]
- Pano-Azucena, A.D.; Ovilla-Martinez, B.; Tlelo-Cuautle, E.; Muñoz-Pacheco, J.M.; de la Fraga, L.G. FPGA-based implementation of different families of fractional-order chaotic oscillators applying Grounwald-Letnikov method. Commun. Nonlinear Sci. Numer. Simulat. 2019, 72, 516–527. [Google Scholar] [CrossRef]
- Bao, H.; Park, J.H.; Cao, J. Adaptive synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dyn. 2015, 82, 1343–1354. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Liu, Y.; Yang, S. Adaptive Synchronization of Fractional-Order Complex Chaotic system with Unknown Complex Parameters. Entropy 2019, 21, 207. https://doi.org/10.3390/e21020207
Zhang R, Liu Y, Yang S. Adaptive Synchronization of Fractional-Order Complex Chaotic system with Unknown Complex Parameters. Entropy. 2019; 21(2):207. https://doi.org/10.3390/e21020207
Chicago/Turabian StyleZhang, Ruoxun, Yongli Liu, and Shiping Yang. 2019. "Adaptive Synchronization of Fractional-Order Complex Chaotic system with Unknown Complex Parameters" Entropy 21, no. 2: 207. https://doi.org/10.3390/e21020207
APA StyleZhang, R., Liu, Y., & Yang, S. (2019). Adaptive Synchronization of Fractional-Order Complex Chaotic system with Unknown Complex Parameters. Entropy, 21(2), 207. https://doi.org/10.3390/e21020207