Entropy Analysis and Neural Network-Based Adaptive Control of a Non-Equilibrium Four-Dimensional Chaotic System with Hidden Attractors

 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Four-dimensional Chaotic System
3. Entropy Analysis
- Form m-sample length vectors, , defined by , for . Each vector contains m consecutive points from the ith sample.
- Compute the Chebyshev distance for any pair of vectors and . This distance is defined as the maximum absolute magnitude of the differences between coordinates, i.e.,
- Estimate the number of pairs of vectors, , whose distance with is less than or equal to r, i.e.,being the Heaviside function, i.e., for and for .
- Calculate the global probability that any two sequences of size m present a distance lower than r, i.e.,
- Recompute the steps 1–4 for vectors with m+1 samples in length. In this case, Equations (3) and (4) should be replaced byrespectively.
- Finally, ApEn can be computed by the difference
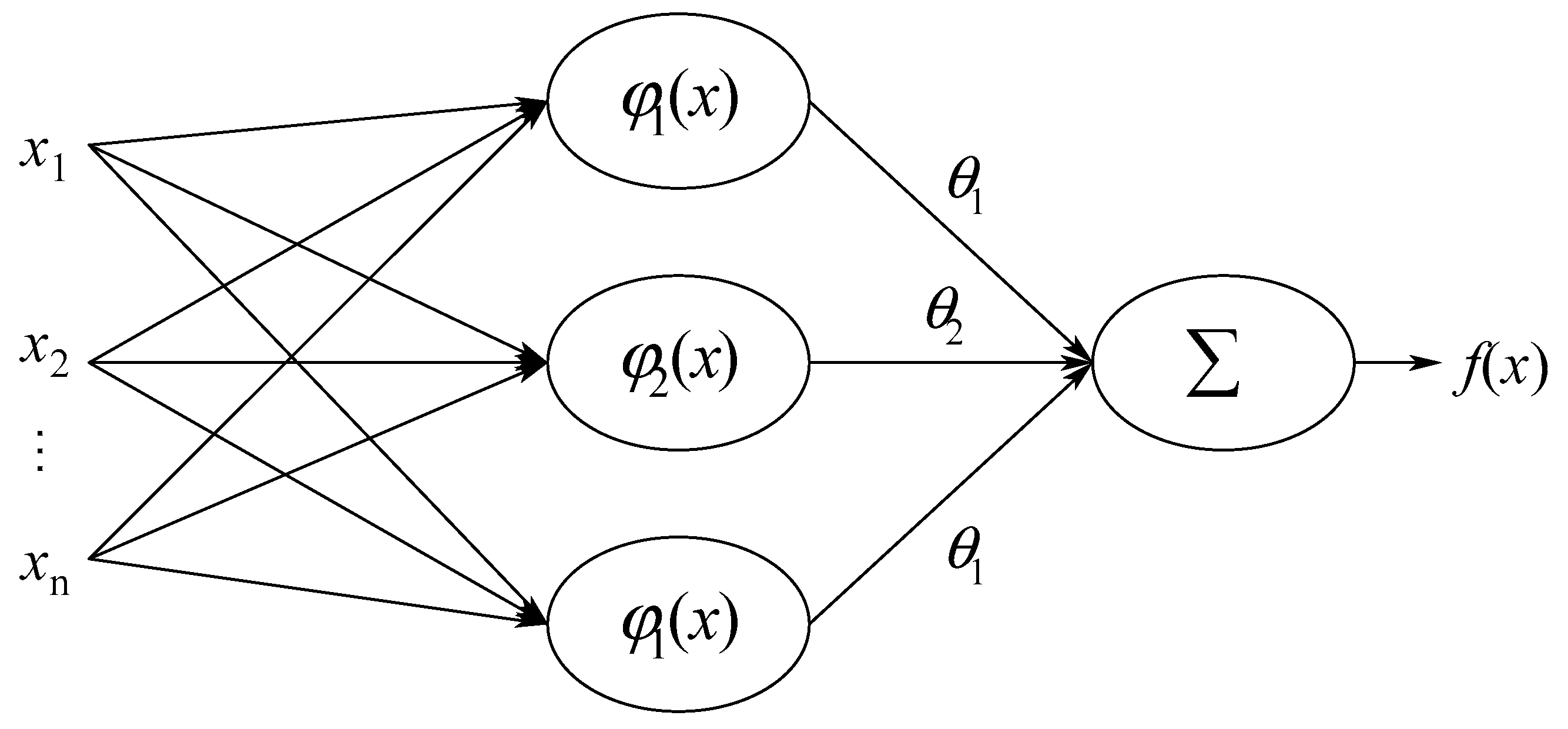
4. Brief Review of the RBF-NNs
4.1. Proposed Adaptive RBF-NN Controller
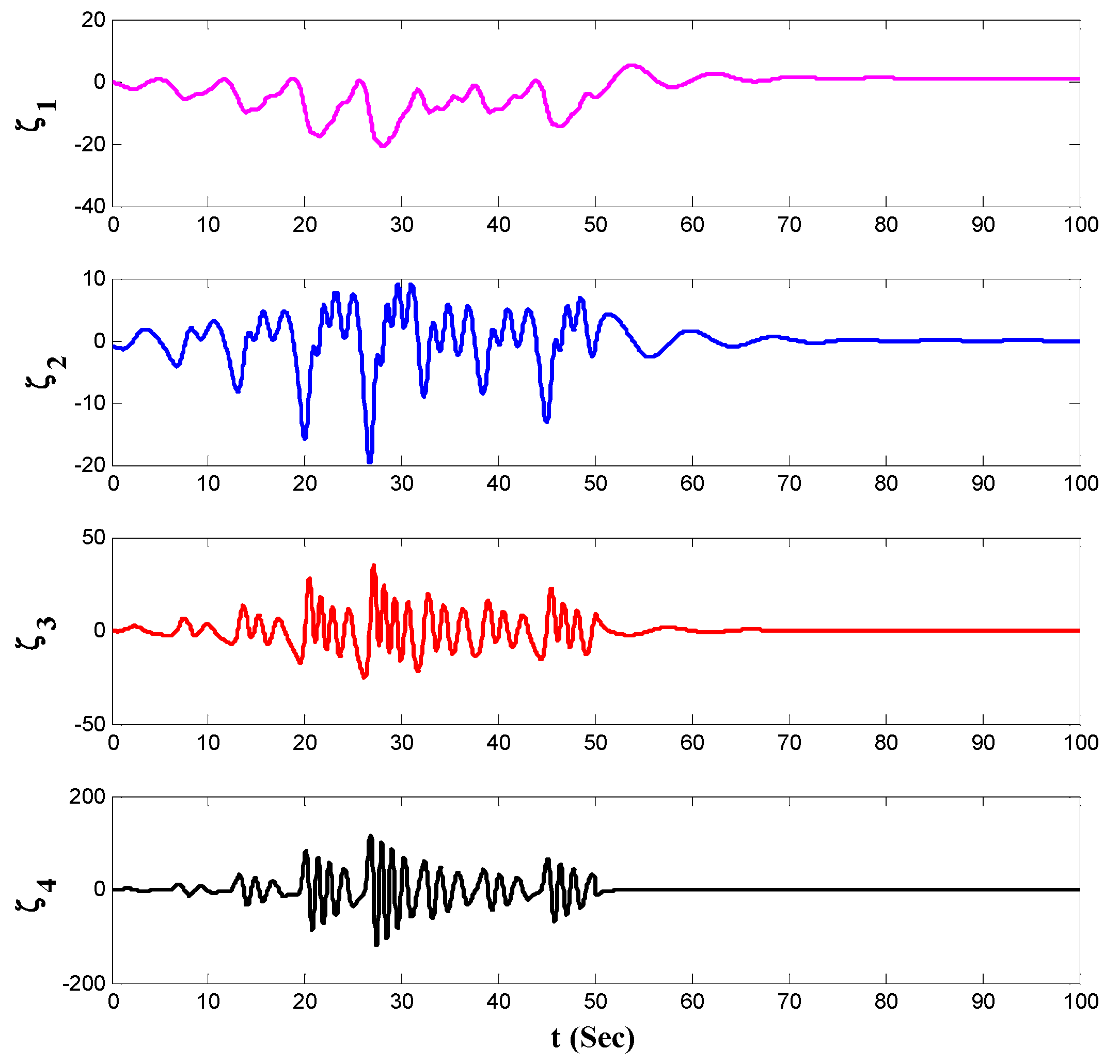
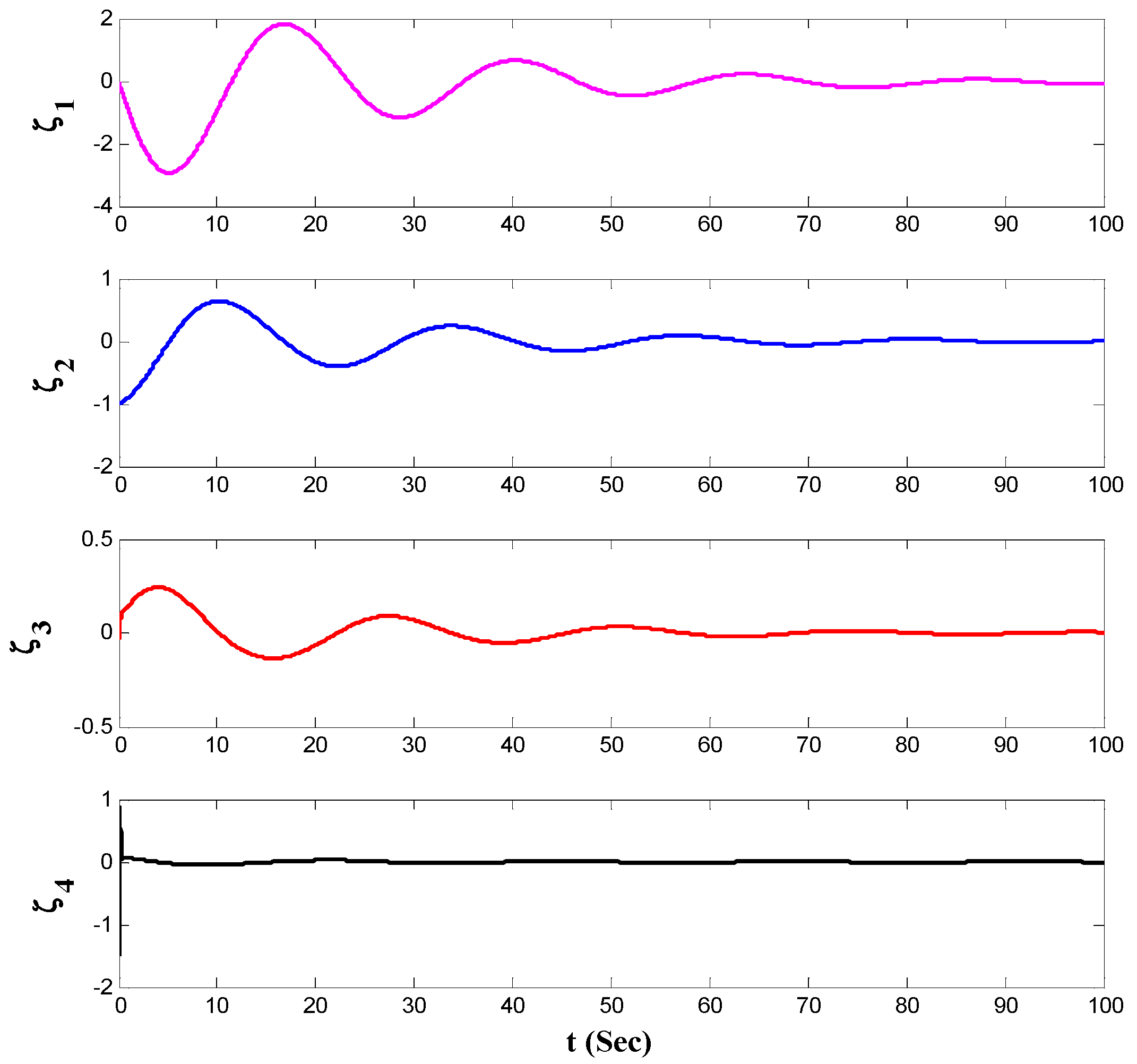
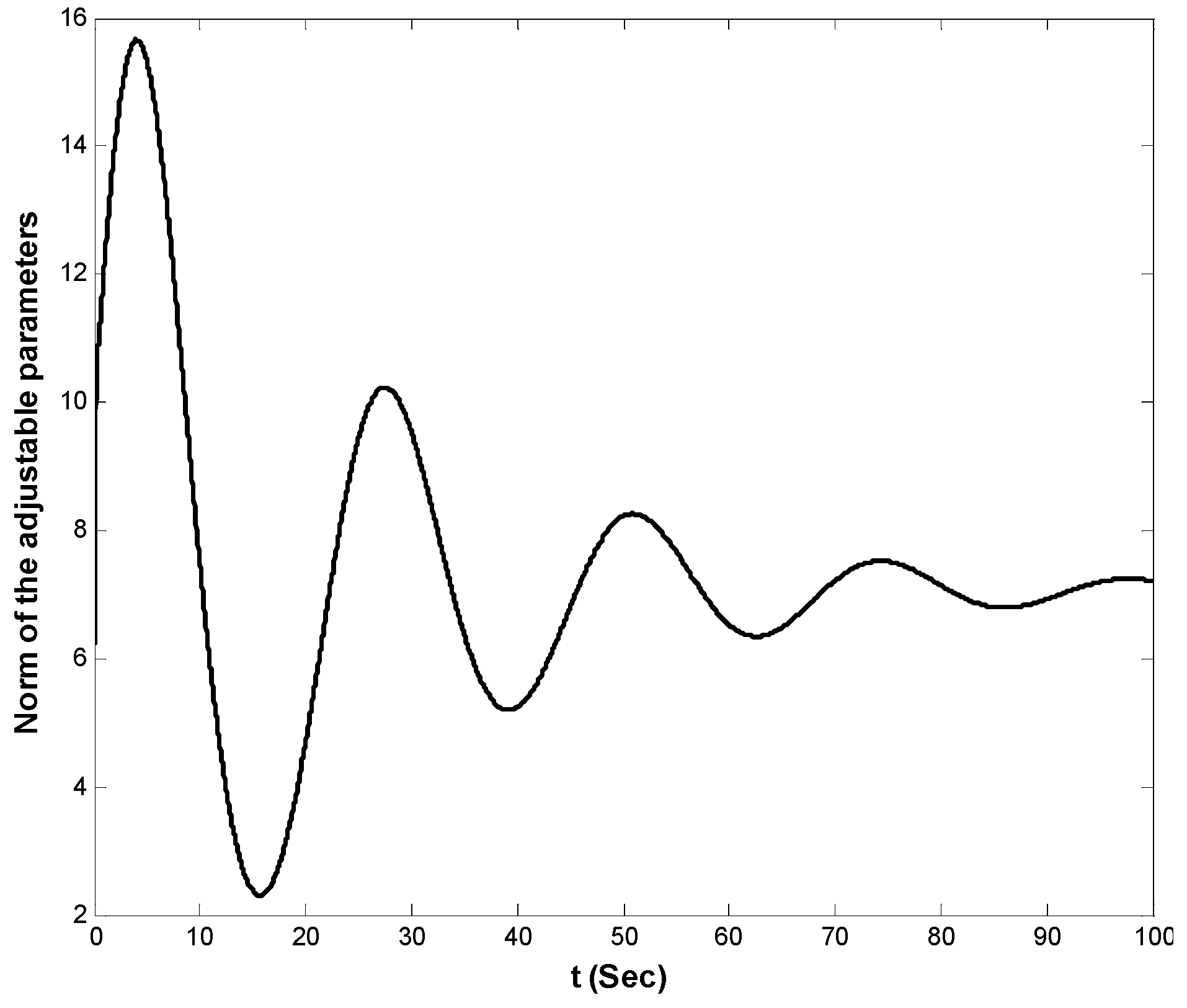
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lai, Q.; Chen, S. Generating multiple chaotic attractors from Sprott B system. Int. J. Bifurc. Chaos 2016, 26, 1650177. [Google Scholar] [CrossRef]
- Sharma, P.R.; Shrimali, M.D.; Prasad, A.; Kuznetsov, N.V.; Leonov, G.A. Control of multistability in hidden attractors. Eur. Phys. J. Spec. Top. 2015, 224, 1485–1491. [Google Scholar] [CrossRef]
- Sprott, J.C.; Jafari, S.; Khalaf, A.J.M.; Kapitaniak, T. Megastability: Coexistence of a countable infinity of nested attractors in a periodically-forced oscillator with spatially-periodic damping. Eur. Phys. J. Spec. Top. 2017, 226, 1979–1985. [Google Scholar] [CrossRef]
- Bao, B.; Jiang, T.; Xu, Q.; Chen, M.; Wu, H.; Hu, Y. Coexisting infinitely many attractors in active band-pass filter-based memristive circuit. Nonlinear Dyn. 2016, 86, 1711–1723. [Google Scholar] [CrossRef]
- Bao, B.-C.; Xu, Q.; Bao, H.; Chen, M. Extreme multistability in a memristive circuit. Electron. Lett. 2016, 52, 1008–1010. [Google Scholar] [CrossRef]
- Munoz-Pacheco, J.M.; Tlelo-Cuautle, E.; Toxqui-Toxqui, I.; Sanchez-Lopez, C.; Trejo-Guerra, R. Frequency limitations in generating multi-scroll chaotic attractors using CFOAs. Int. J. Electron. 2014, 101, 1559–1569. [Google Scholar] [CrossRef]
- Tlelo-Cuautle, E.; Rangel-Magdaleno, J.J.; Pano-Azucena, A.D.; Obeso-Rodelo, P.J.; Nuñez-Perez, J.C. FPGA realization of multi-scroll chaotic oscillators. Commun. Nonlinear. Sci. Numer. Simul. 2015, 27, 66–80. [Google Scholar] [CrossRef]
- Leonov, G.A.; Kuznetsov, N.V. Hidden attractors in dynamical systems. From hidden oscillations in Hilbert–Kolmogorov, Aizerman, and Kalman problems to hidden chaotic attractor in Chua circuits. Int. J. Bifurc. Chaos 2013, 23, 1330002. [Google Scholar] [CrossRef]
- Sprott, J.C. Some simple chaotic flows. Phys. Rev. E Stat. Nonlin. Soft Matter Phys. 1994, 50, R647. [Google Scholar] [CrossRef]
- Pham, V.-T.; Volos, C.; Jafari, S.; Kapitaniak, T. Coexistence of hidden chaotic attractors in a novel no-equilibrium system. Nonlinear Dyn. 2017, 87, 2001–2010. [Google Scholar] [CrossRef]
- Pham, V.-T.; Jafari, S.; Volos, C.; Gotthans, T.; Wang, X.; Hoang, D.V. A chaotic system with rounded square equilibrium and with no-equilibrium. OPTIK 2017, 130, 365–371. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.C.; Golpayegani, S.M.R.H. Elementary quadratic chaotic flows with no equilibria. Phys. Lett. A 2013, 377, 699–702. [Google Scholar] [CrossRef]
- Wei, Z. Dynamical behaviors of a chaotic system with no equilibria. Phys. Lett. A 2011, 376, 102–108. [Google Scholar] [CrossRef]
- Pham, V.-T.; Akgul, A.; Volos, C.; Jafari, S.; Kapitaniak, T. Dynamics and circuit realization of a no-equilibrium chaotic system with a boostable variable. AEU Int. J. Electron. C 2017, 78, 134–140. [Google Scholar] [CrossRef]
- Ren, S.; Panahi, S.; Rajagopal, K.; Akgul, A.; Pham, V.-T.; Jafari, S. A new chaotic flow with hidden attractor: The first hyperjerk system with no equilibrium. Z. Naturforsch. A 2018, 73, 239–249. [Google Scholar] [CrossRef]
- Rossler, O.E. An equation for hyperchaos. Phys. Lett. A 1979, 71, 155–157. [Google Scholar] [CrossRef]
- Wei, Z.; Wang, R.; Liu, A. A new finding of the existence of hidden hyperchaotic attractors with no equilibria. Math. Comput. Simul. 2014, 100, 13–23. [Google Scholar] [CrossRef]
- Tahir, F.R.; Jafari, S.; Pham, V.-T.; Volos, C.; Wang, X. A novel no-equilibrium chaotic system with multiwing butterfly attractors. Int. J. Bifurc. Chaos 2015, 25, 1550056. [Google Scholar] [CrossRef]
- Pham, V.T.; Vaidyanathan, S.; Volos, C.K.; Jafari, S. Hidden attractors in a chaotic system with an exponential nonlinear term. Eur. Phys. J. Spec. Top. 2015, 224, 1507–1517. [Google Scholar] [CrossRef]
- Pham, V.-T.; Vaidyanathan, S.; Volos, C.; Jafari, S.; Kingni, S.T. A no-equilibrium hyperchaotic system with a cubic nonlinear term. OPTIK 2016, 127, 3259–3265. [Google Scholar] [CrossRef]
- Bao, B.C.; Bao, H.; Wang, N.; Chen, M.; Xu, Q. Hidden extreme multistability in memristive hyperchaotic system. Chaos Soliton. Fract. 2017, 94, 102–111. [Google Scholar] [CrossRef]
- Zhang, S.; Zeng, Y.; Li, Z.; Wang, M.; Xiong, L. Generating one to four-wing hidden attractors in a novel 4D no-equilibrium chaotic system with extreme multistability. Chaos 2018, 28, 013113. [Google Scholar] [CrossRef] [PubMed]
- Mobayen, S.; Ma, J. Robust finite-time composite nonlinear feedback control for synchronization of uncertain chaotic systems with nonlinearity and time-delay. Chaos Soliton. Fract. 2018, 114, 46–54. [Google Scholar] [CrossRef]
- Shukla, M.K.; Sharma, B.B. Stabilization of a class of fractional order chaotic systems via backstepping approach. Chaos Soliton. Fract. 2017, 98, 56–62. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, H. Fuzzy synchronization of chaotic systems via intermittent control. Chaos Soliton. Fract. 2018, 106, 154–160. [Google Scholar] [CrossRef]
- Hsiao, F.-H. Robust H∞ fuzzy control of dithered chaotic systems. Neurocomputing 2013, 99, 509–520. [Google Scholar] [CrossRef]
- Lin, C.-M.; Huynh, T.-T. Function-Link Fuzzy Cerebellar Model Articulation Controller Design for Nonlinear Chaotic Systems Using TOPSIS Multiple Attribute Decision-Making Method. Int. J. Fuzzy Syst. 2018, 20, 1839–1856. [Google Scholar] [CrossRef]
- Zhang, X.; Li, D.; Zhang, X. Adaptive fuzzy impulsive synchronization of chaotic systems with random parameters. Chaos Soliton. Fract. 2017, 104, 77–83. [Google Scholar] [CrossRef]
- Rajagopal, K.; Jahanshahi, H.; Varan, M.; Bayır, I.; Pham, V.-T.; Jafari, S.; Karthikeyan, A. A hyperchaotic memristor oscillator with fuzzy based chaos control and LQR based chaos synchronization. AEU Int. J. Electron. C. 2018, 94, 55–68. [Google Scholar] [CrossRef]
- Mobayen, S. Chaos synchronization of uncertain chaotic systems using composite nonlinear feedback based integral sliding mode control. ISA Trans. 2018, 77, 100–111. [Google Scholar] [CrossRef]
- Chen, X.; Park, J.H.; Cao, J.; Qiu, J. Adaptive synchronization of multiple uncertain coupled chaotic systems via sliding mode control. Neurocomputing 2018, 273, 9–21. [Google Scholar] [CrossRef]
- Deepika, D.; Kaur, S.; Narayan, S. Uncertainty and disturbance estimator based robust synchronization for a class of uncertain fractional chaotic system via fractional order sliding mode control. Chaos Soliton. Fract. 2018, 115, 196–203. [Google Scholar] [CrossRef]
- Sun, Z. Synchronization of fractional-order chaotic systems with non-identical orders, unknown parameters and disturbances via sliding mode control. Chin. J. Phys. 2018, 56, 2553–2559. [Google Scholar] [CrossRef]
- Liu, H.; Yang, J. Sliding-mode synchronization control for uncertain fractional-order chaotic systems with time delay. Entropy 2015, 17, 4202–4214. [Google Scholar] [CrossRef]
- Shieh, C.-S.; Hung, R.-T. Hybrid control for synchronizing a chaotic system. Appl. Math. Model. 2011, 35, 3751–3758. [Google Scholar] [CrossRef]
- Tsai, J.S.-H.; Fang, J.-S.; Yan, J.-J.; Dai, M.-C.; Guo, S.-M.; Shieh, L.-S. Hybrid robust discrete sliding mode control for generalized continuous chaotic systems subject to external disturbances. Nonlinear Anal. Hybrid Syst. 2018, 29, 74–84. [Google Scholar] [CrossRef]
- Cai, P.; Yuan, Z.Z. Hopf bifurcation and chaos control in a new chaotic system via hybrid control strategy. Chin. J. Phys. 2017, 55, 64–70. [Google Scholar] [CrossRef]
- Jahanshahi, H. Smooth control of HIV/AIDS infection using a robust adaptive scheme with decoupled sliding mode supervision. Eur. Phys. J. Spec. Top. 2018, 227, 707–718. [Google Scholar] [CrossRef]
- Jahanshahi, H.; Rajagopal, K.; Akgul, A.; Sari, N.N.; Namazi, H.; Jafari, S. Complete analysis and engineering applications of a megastable nonlinear oscillator. Int. J. Non Linear Mech. 2018, 107, 126–136. [Google Scholar] [CrossRef]
- Najafizadeh Sari, N.; Jahanshahi, H.; Fakoor, M. Adaptive Fuzzy PID Control Strategy for Spacecraft Attitude Control. Int. J. Fuzzy Syst. 2019. [Google Scholar] [CrossRef]
- Mahmoodabadi, M.J.; Jahanshahi, H. Multi-objective optimized fuzzy-PID controllers for fourth order nonlinear systems. Eng. Sci. Technol. 2016, 19, 1084–1098. [Google Scholar] [CrossRef]
- Kosari, A.; Jahanshahi, H.; Razavi, S.A. Optimal FPID control approach for a docking maneuver of two spacecraft: Translational motion. J. Aerospace Eng. 2017, 30, 04017011. [Google Scholar] [CrossRef]
- Hou, R.; Wang, L.; Gao, Q.; Hou, Y.; Wang, C. Indirect adaptive fuzzy wavelet neural network with self-recurrent consequent part for AC servo system. ISA Trans. 2017, 70, 298–307. [Google Scholar] [CrossRef] [PubMed]
- Solgi, Y.; Ganjefar, S. Variable structure fuzzy wavelet neural network controller for complex nonlinear systems. Appl. Soft Comput. 2018, 64, 674–685. [Google Scholar] [CrossRef]
- Ahn, C.K. Neural network ∞ chaos synchronization. Nonlinear Dyn. 2010, 60, 295–302. [Google Scholar] [CrossRef]
- Hsu, C.-F. Hermite-neural-network-based adaptive control for a coupled nonlinear chaotic system. Neural Comput. Appl. 2013, 22, 421–433. [Google Scholar] [CrossRef]
- Gokce, K.; Uyaroglu, Y. An Adaptive Neural Network Control Scheme for Stabilizing Chaos to the Stable Fixed Point. Inf. Technol. Control 2017, 46, 219–227. [Google Scholar] [CrossRef]
- Zouari, F.; Boulkroune, A.; Ibeas, A. Neural adaptive quantized output-feedback control-based synchronization of uncertain time-delay incommensurate fractional-order chaotic systems with input nonlinearities. Neurocomputing 2017, 237, 200–225. [Google Scholar] [CrossRef]
- Yadmellat, P.; Nikravesh, S.K.Y. A recursive delayed output-feedback control to stabilize chaotic systems using linear-in-parameter neural networks. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 383–394. [Google Scholar] [CrossRef]
- Sarcheshmeh, S.F.; Esmaelzadeh, R.; Afshari, M. Chaotic satellite synchronization using neural and nonlinear controllers. Chaos Soliton. Fract. 2017, 97, 19–27. [Google Scholar] [CrossRef]
- Fang, L.; Li, T.; Wang, X.; Gao, X. Adaptive synchronization of uncertain chaotic systems via neural network-based dynamic surface control design. In Proceedings of the 10th International Symposium on Neural Networks (2013 ISNN), Dalian, China, 4–6 July 2013; pp. 104–111. [Google Scholar]
- Shao, S.; Chen, M.; Yan, X. Prescribed performance synchronization for uncertain chaotic systems with input saturation based on neural networks. Neural Comput. Appl. 2018, 29, 1349–1361. [Google Scholar] [CrossRef]
- Gomez, I.S.; Losada, M.; Lombardi, O. About the Concept of Quantum Chaos. Entropy 2017, 19, 205. [Google Scholar] [CrossRef]
- Frigg, R. In what sense is the Kolmogorov-Sinai entropy a measure for chaotic behaviour?—bridging the gap between dynamical systems theory and communication theory. Br. J. Philos. Sci. 2004, 55, 411–434. [Google Scholar] [CrossRef]
- Young, L.-S. Entropy in dynamical systems. In Entropy; Princeton University Press: rinceton, NJ, USA, 2003; pp. 313–328. [Google Scholar]
- Grassberger, P.; Procaccia, I. Estimation of the Kolmogorov entropy from a chaotic signal. Phys. Rev. A 1983, 28, 2591. [Google Scholar] [CrossRef]
- Pincus, S.M. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef]
- Wang, C.; Ding, Q. A New Two-Dimensional Map with Hidden Attractors. Entropy 2018, 20, 322. [Google Scholar] [CrossRef]
- Xu, G.; Shekofteh, Y.; Akgül, A.; Li, C.; Panahi, S. A new chaotic system with a self-excited attractor: Entropy measurement, signal encryption, and parameter estimation. Entropy 2018, 20, 86. [Google Scholar] [CrossRef]
- Pincus, S. Approximate entropy (ApEn) as a complexity measure. Chaos 1995, 5, 110–117. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef]
- Borowska, M. Entropy-based algorithms in the analysis of biomedical signals. Stud. Logic Grammar Rhetoric 2015, 43, 21–32. [Google Scholar] [CrossRef]
- Chen, W.; Wang, Z.; Xie, H.; Yu, W. Characterization of surface EMG signal based on fuzzy entropy. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 266–272. [Google Scholar] [CrossRef]










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jahanshahi, H.; Shahriari-Kahkeshi, M.; Alcaraz, R.; Wang, X.; Singh, V.P.; Pham, V.-T. Entropy Analysis and Neural Network-Based Adaptive Control of a Non-Equilibrium Four-Dimensional Chaotic System with Hidden Attractors. Entropy 2019, 21, 156. https://doi.org/10.3390/e21020156
Jahanshahi H, Shahriari-Kahkeshi M, Alcaraz R, Wang X, Singh VP, Pham V-T. Entropy Analysis and Neural Network-Based Adaptive Control of a Non-Equilibrium Four-Dimensional Chaotic System with Hidden Attractors. Entropy. 2019; 21(2):156. https://doi.org/10.3390/e21020156
Chicago/Turabian StyleJahanshahi, Hadi, Maryam Shahriari-Kahkeshi, Raúl Alcaraz, Xiong Wang, Vijay P. Singh, and Viet-Thanh Pham. 2019. "Entropy Analysis and Neural Network-Based Adaptive Control of a Non-Equilibrium Four-Dimensional Chaotic System with Hidden Attractors" Entropy 21, no. 2: 156. https://doi.org/10.3390/e21020156
APA StyleJahanshahi, H., Shahriari-Kahkeshi, M., Alcaraz, R., Wang, X., Singh, V. P., & Pham, V.-T. (2019). Entropy Analysis and Neural Network-Based Adaptive Control of a Non-Equilibrium Four-Dimensional Chaotic System with Hidden Attractors. Entropy, 21(2), 156. https://doi.org/10.3390/e21020156