1. Introduction
Quantum state tomography is a method of estimating an unknown quantum state represented on some Hilbert space
, consisting of a fixed set of measurements that provides sufficient information about the unknown quantum state, as well as a data processing that maps each measurement outcome into the quantum state space
on
[
1]. A set of measurements that fulfils this requirement is sometimes called a measurement basis. For mathematical simplicity, we restrict ourselves to Hilbert spaces of finite dimensions.
To elucidate our motivation, let us treat the simplest case when
. It is well known that there is a one-to-one affine correspondence between the qubit state space
and the unit ball (called the Bloch ball)
In fact, the correspondence is explicitly given by the Stokes parametrization
where
,
, and
are the standard Pauli matrices. Since
for
, the set
of observables is regarded as an unbiased estimator [
2,
3,
4] for the Stokes parameter
. This is the basic idea behind the standard qubit state tomography, which runs as follows: suppose that, among
N independent experiments, the
ith Pauli matrix
was measured
times, and outcomes
(spin-up) and
(spin-down) were obtained
and
times, respectively. Then a naive estimate for the true value of the parameter
is
When the estimate
falls outside the Bloch ball
B, it needs to be corrected so that the new estimate lies in the Bloch ball
B. The maximum likelihood method is a canonical one to obtain a corrected estimate [
2,
5,
6,
7,
8,
9,
10]. From the point of view of information geometry [
11,
12,
13], the maximum likelihood estimate (MLE) is the orthogonal projection from the temporary estimate
onto the Bloch ball
B with respect to the standard Fisher metric along the
-geodesic [
14], (cf.,
Appendix A).
Now let us deal with a slightly generalized situation: suppose that the
ith Pauli matrix
was measured
times and outcomes
and
were obtained
and
times, respectively, where
were random variables. Such a situation arises in an actual experiment due to unexpected particle loss [
15]. We shall call such a generalized estimation scheme a
randomized state tomography. A naive estimate in this case is the following:
One may invoke the maximum likelihood method when falls outside the Bloch ball. It is then interesting to ask if there is also a useful geometrical picture for the MLE even when the numbers of measurements are random variables.
The above mentioned problem is naturally extended to quantum state tomography on an arbitrary Hilbert space that admits a full set of mutually unbiased bases [
16,
17]. In a
d-dimensional Hilbert space
,
k orthonormal bases
are called
mutually unbiased if they satisfy
for all
with
, and
. It is known that the number
k of mutually unbiased bases (MUBs) is at most
[
18]. If there are
MUBs, the Hilbert space
is said to admit a full set of MUBs. For example, when the dimension
d of
is a power of a prime,
admits a full set of MUBs [
19]. Whether or not any Hilbert space admits a full set of MUBs is an open question [
16].
In what follows, unless otherwise stated, we assume that the Hilbert space
under consideration admits a full set of MUBs. As demonstrated in
Appendix B (cf., [
17,
20]), each density operator
can be uniquely represented as
where
is the projection-valued measure (PVM) associated with the
ath orthogonal basis in the MUBs, and
is a
-dimensional real parameter that is chosen so that
. A simple calculation shows that, if the
ath measurement
is applied to the state
, one obtains each outcome
with probability
This implies that the parametrization
establishes an affine isomorphism between the quantum state space
and the convex set
Incidentally, the Stokes parametrization
for the qubit state space
is regarded as a special case of the above parametrization
for
. In fact, the eigenvectors of the Pauli matrices
,
,
form a full set of MUBs on
, and the Stokes parametrization
is related to the above parametrization
as
Now that a standard affine parametrization
has been established on an arbitrary Hilbert space
that admits a full set of MUBs, the scheme of randomized state tomography is naturally extended to
as follows. Suppose that the
ath measurement
was applied
times and the outcome
was obtained
times, where
were random variables. Then, due to (
2), a naive estimate for the parameter
is
When the estimate
falls outside the parameter space
B, one may invoke the maximum likelihood method to obtain a corrected estimate.
The objective of the present paper is to clarify that the -projection interpretation for the MLE is still valid for the randomized state tomography by changing the standard Fisher metric into a deformed one depending on the realization of the random variables , which might as well be called a randomized Fisher metric. Such a novel geometrical picture will provide important insights into the quantum metrology.
The paper is organized as follows. In
Section 2, we first introduce a statistical model on an extended sample space
that represents the randomized state tomography. We then clarify that the probability simplex
is decomposed into mutually orthogonal dualistic foliation by means of certain
- and
-autoparallel submanifolds. In
Section 3, we give a statistical interpretation of the above-mentioned dualistic foliation structure. In particular, we point out that the MLE is the
-projection with respect to a deformed Fisher metric that depends on the realization of the random variables
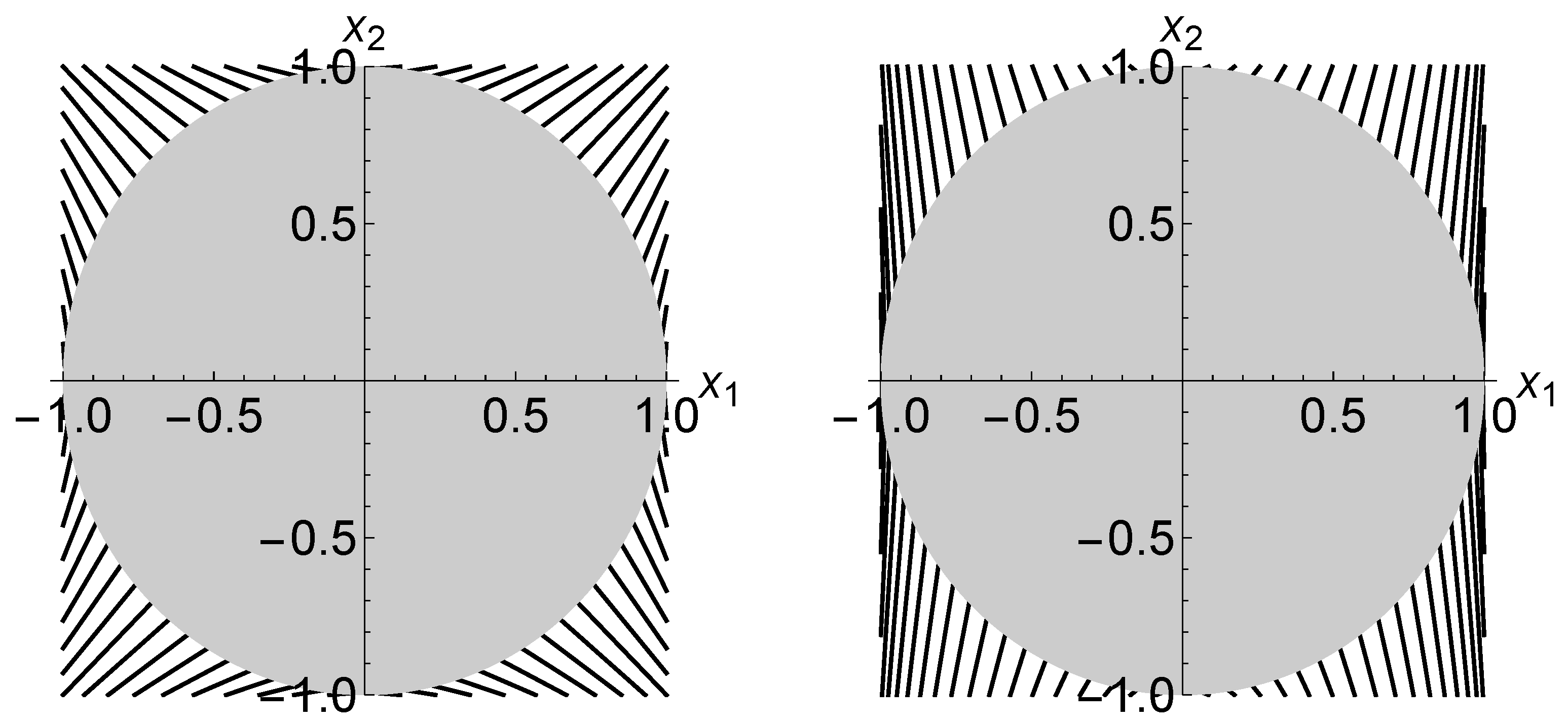
. These results are demonstrated by several illustrative examples in
Section 4. Finally, some concluding remarks are presented in
Section 5. For the reader’s convenience, some background information is provided in
Appendix A and
Appendix B, including information geometry of the MLE and affine parametrization of a quantum state space
.
2. Geometry of Randomized State Tomography
We identify the randomized state tomography on
with the following scheme [
21]: at each step of the measurement, one chooses a PVM
at random with probability
, (
), and applies the chosen PVM to yield an outcome
. The sample space
for this statistical picture is
Suppose that the unknown state
is specified by the coordinate
as (
1). Then the corresponding probability distribution on
is represented by the
-dimensional probability vector
where the parameter
belongs to the domain
Note that the family
with
forms a
-dimensional open probability simplex
, and the parameters
form a coordinate system of
. Since we are only interested in estimating the parameter
, the remaining parameter
is understood as a set of nuisance parameters [
2,
12]. In what follows, we regard
as a statistical manifold endowed with the standard dualistic structure
, where
g is the Fisher metric, and
and
are the exponential and mixture connections [
12].
Let us consider the following submanifolds of
:
for each
, and
for each
. Since
and
are convex subsets of
, they are both
-autoparallel. In addition, we have the following.
Proposition 1. For each , the submanifold is -autoparallel. Furthermore, for each and , the submanifolds and are mutually orthogonal with respect to the Fisher metric g.
Proof. Let us change the coordinate system
into
, where
for
, and
for
. With this coordinate transformation, the probability vector
is rewritten as
Here,
is a function of
defined by
and is not a component of the coordinate system
. We see from the representation (
3) that the coordinate system
is
-affine. The potential function for
is given by the negative entropy
and the dual
-affine coordinate system
is given by
for
, and
for
. Thus, fixing
is equivalent to fixing the coordinates
, and the submanifold
is generated by changing the remaining parameters
. This implies that
is
-autoparallel, proving the first part of the claim.
To prove the second part, let us introduce a mixed coordinate system [
11]
of
. Since
, the submanifold
is rewritten as
On the other hand, the submanifold
is rewritten as
Thus, the orthogonality of and is an immediate consequence of the orthogonality of the dual affine coordinate systems and with respect to the Fisher metric g. ☐
Proposition 1 implies that the manifold
is decomposed into mutually orthogonal dualistic foliation based on the submanifolds
and
, as illustrated in
Figure 1. We shall exploit this geometrical structure in the next section.
3. Estimation of the Parameter
Let us proceed to the problem of estimating the unknown parameter
using the randomized tomography. Suppose that, among
N independent repetitions of experiments, the
ath measurement
was applied
times and outcomes
were obtained
times. Then temporary estimates
for the parameters
are given by
for
, and
for
. If
has fallen outside the physical domain
B, one may seek a corrected estimate by the maximum likelihood method. Observe that, due to (
2), the empirical distribution
is represented as
On the other hand, the physical domain
B in the parameter space
corresponds to the subset
of
, (see
Figure 1). The MLE
in
is then given by
where
is the Kullback-Leibler divergence (cf.,
Appendix A). A crucial observation is the following.
Proposition 2. The minimum in (5) is achieved on . Proof. Let us take a point
arbitrarily. It then follows from the mutually orthogonal dualistic foliation of
established in Proposition 1 that
In the second equality, the generalized Pythagorean theorem was used. Consequently,
for all
, and the right-hand side is achieved if and only if
. ☐
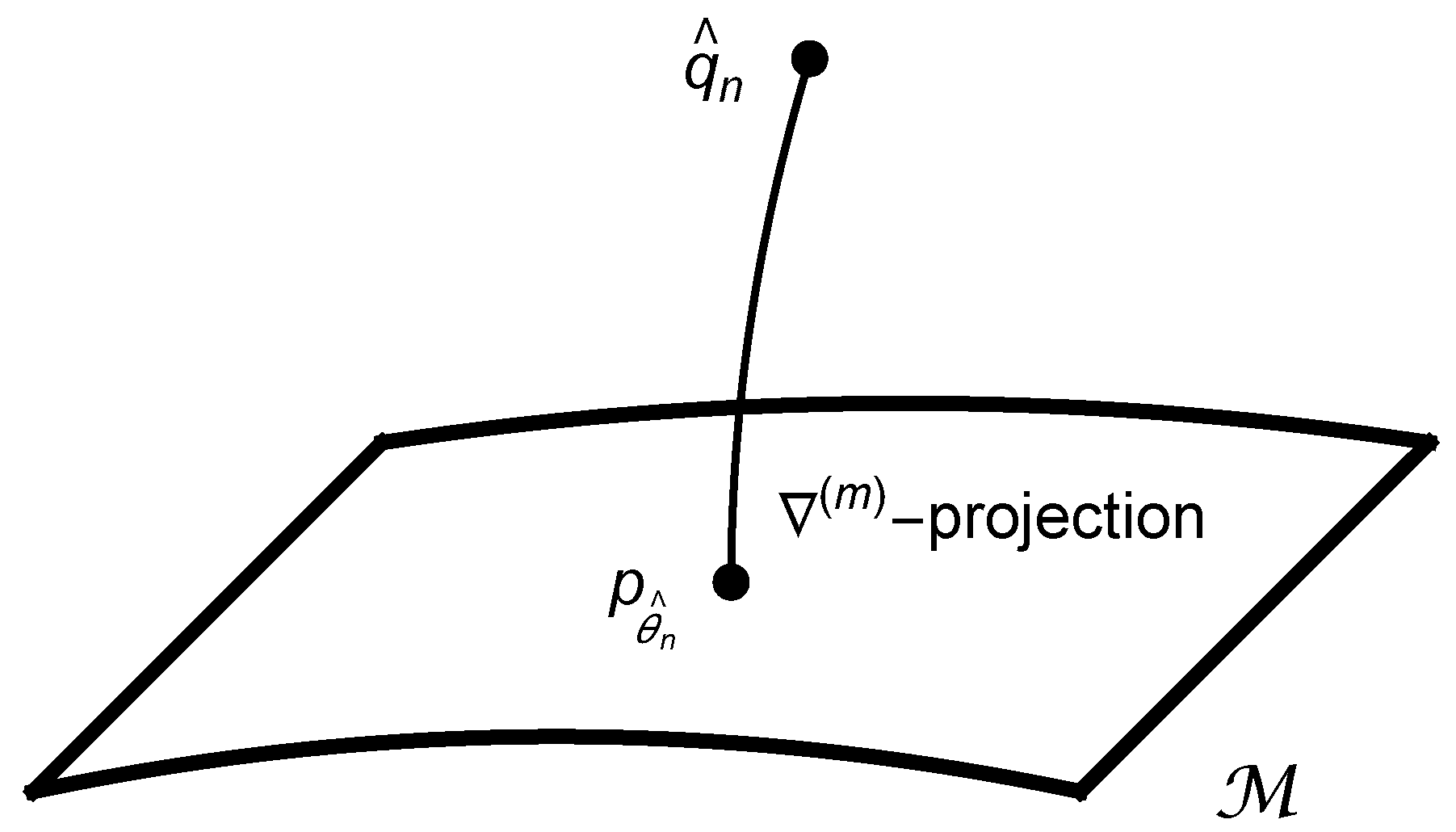
The geometrical implication of Proposition 2 is illustrated in
Figure 2. The MLE
is the
-projection from the empirical distribution
to
, and is on the section
specified by the temporary estimate
.
Now we arrive at a geometrical picture behind the parameter estimation based on randomized state tomography. Suppose we are given a temporary estimate
with
. Due to Proposition 2, we can restrict ourselves to section
as the search space for the MLE
. Since each section
is affinely isomorphic to the parameter space
, we can introduce a dualistic structure
on
in the following way. Firstly, we identify the metric
with the Fisher metric
g restricted on
, that is,
for
and
, where
and
are formally defined as
Secondly, the mixture connection
on
is defined through the natural affine isomorphism between
and
. Finally, the dual connection
is defined by the duality
Thus, the MLE in the parameter space is interpreted as the -projection from to the physical domain B with respect to the metric .

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




