Mechanical Fault Diagnosis of High Voltage Circuit Breakers Utilizing EWT-Improved Time Frequency Entropy and Optimal GRNN Classifier

Abstract
1. Introduction
2. Signal Acquisition and Fault Diagnosis Process
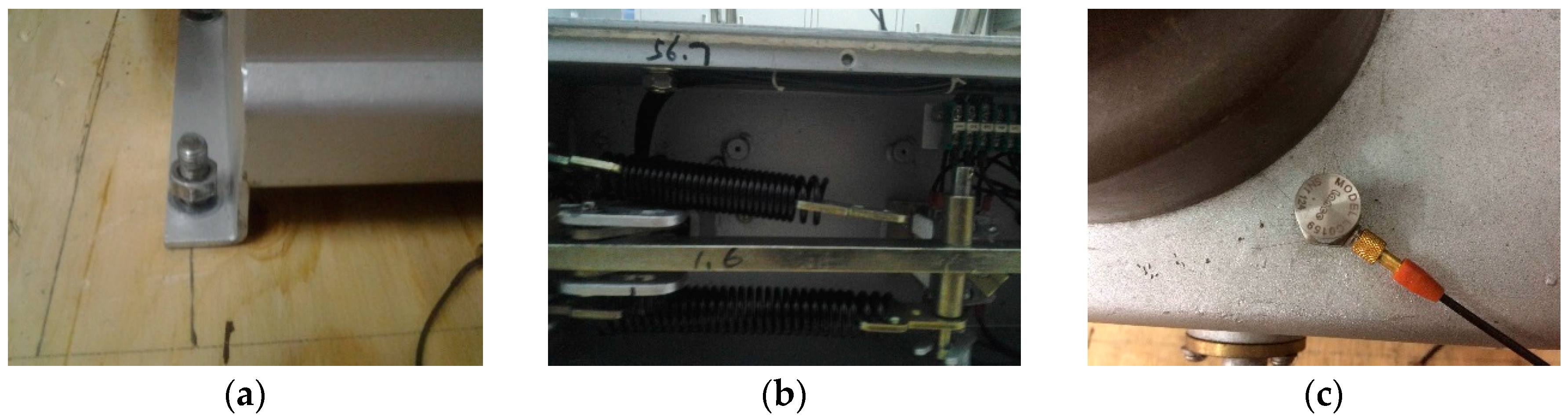
2.1. Experimental Materials
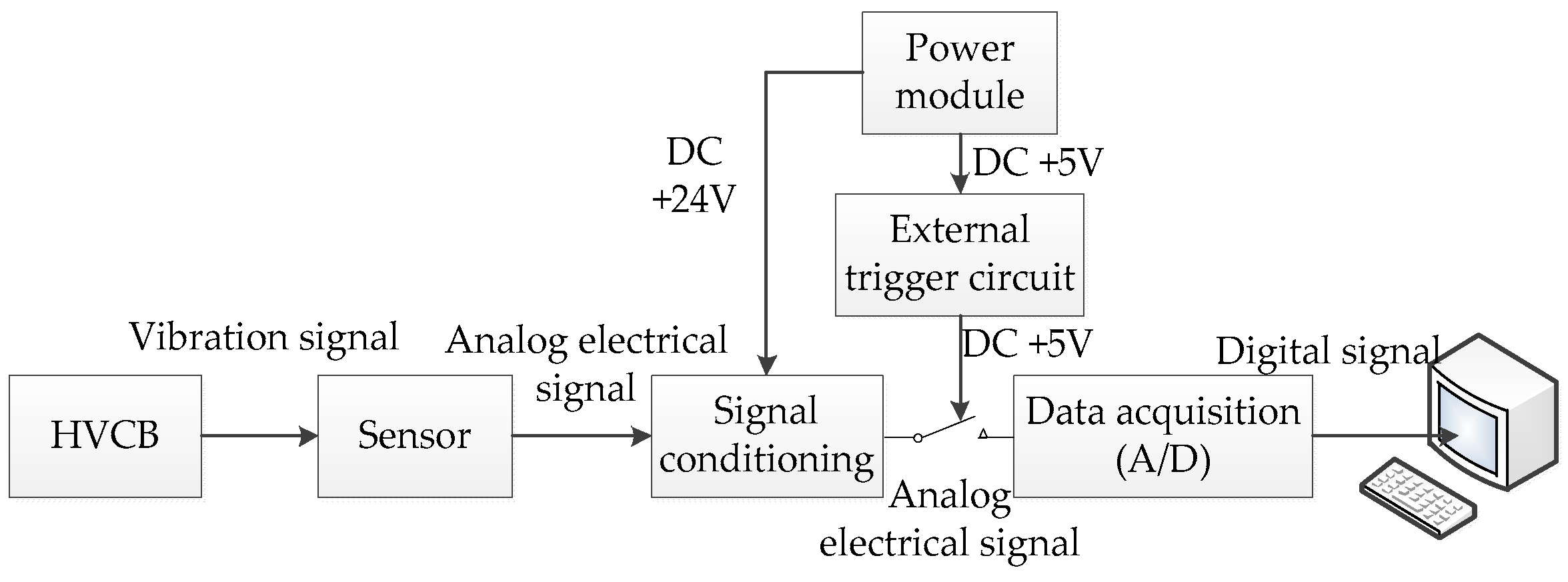
2.2. Design of Acquisition System
2.3. Fault Diagnosis Process
3. EWT
3.1. EWT Decomposition Theory
3.2. Determining the Segment Number N of EWT
- (1)
- , in this case, the algorithm finds enough maxima in Fourier spectrum, then just keep the first N − 1 maxima.
- (2)
- , in this case, the signal has less modes than expected, then keep all the detected maxima and reset N to the appropriate value.
3.3. Simulation Signal Decomposition by EWT Method
3.3.1. Modeling of Classical Simulation Signal
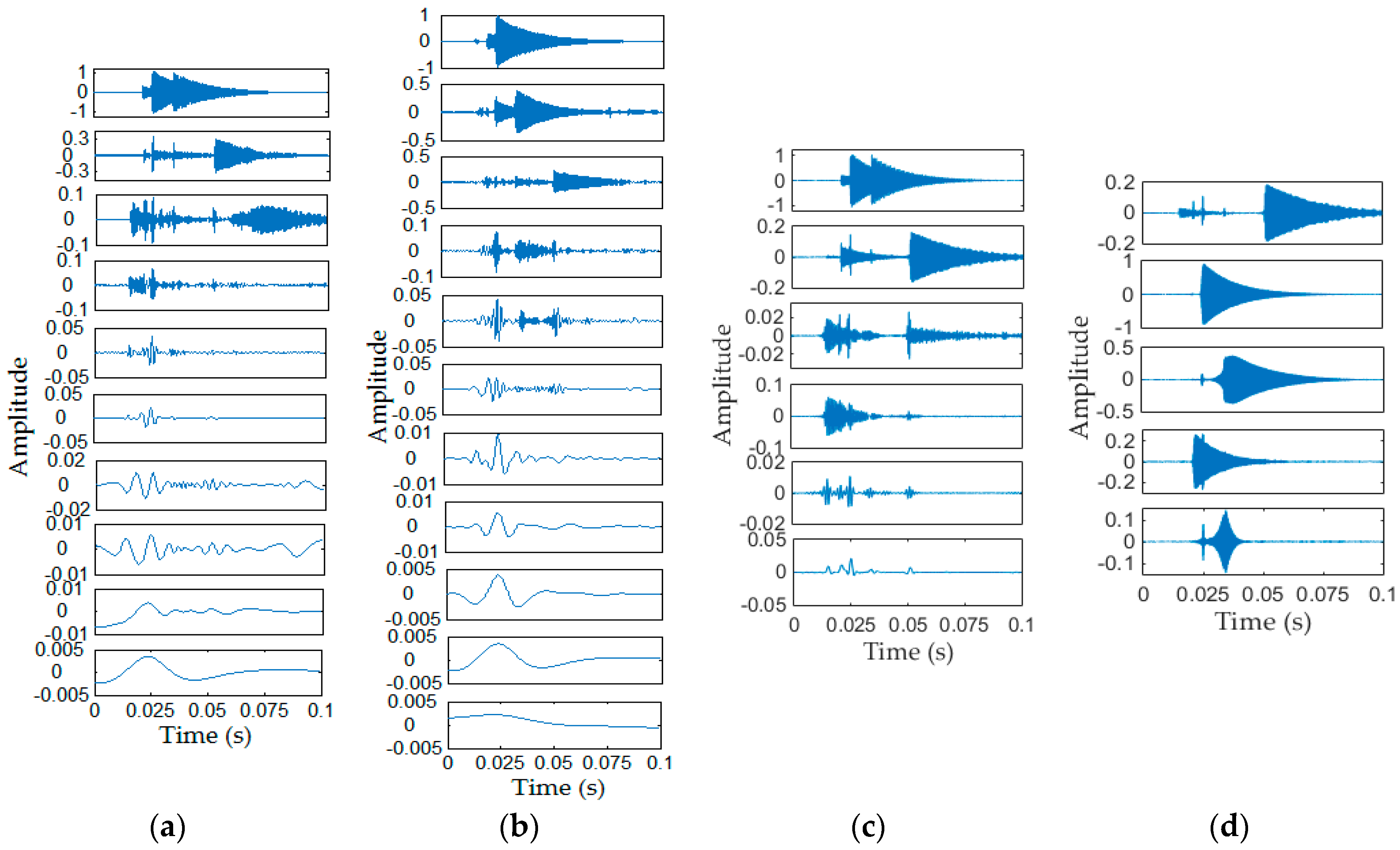
3.3.2. Simulation Signal Decomposition
4. Feature Extraction by Improved Time-Frequency Entropy Method
4.1. Calculation of Time-Frequency Plane
4.2. Improved Time-Frequency Entropy Method
- Along the time axis
- Along the frequency axiswhere is the integral (for discrete signals, it is the sum) of the amplitude envelope of the corresponding sub-plane. Then the feature vector can be denoted as:where the value of describes the characteristics of signal in the frequency domain, while the value of describes the characteristics of signal in the time domain, thus the time migration of each vibration events can be detected by . Therefore the proposed ITFE method can measure the features of signals from both frequency domain and time domain.
4.3. Steps of Feature Extraction
- (1)
- Decompose the vibration signals of HVCB into a series of physically meaningful modes by EWT method.
- (2)
- According to these mode components, calculate the time frequency plane and marginal spectrum of vibration signal by Hilbert transform.
- (3)
- Divide the time frequency plane into F × L segments by using proposed ITFE method.
- (4)
- Calculate the time-frequency entropy and , and then construct the feature vectors .
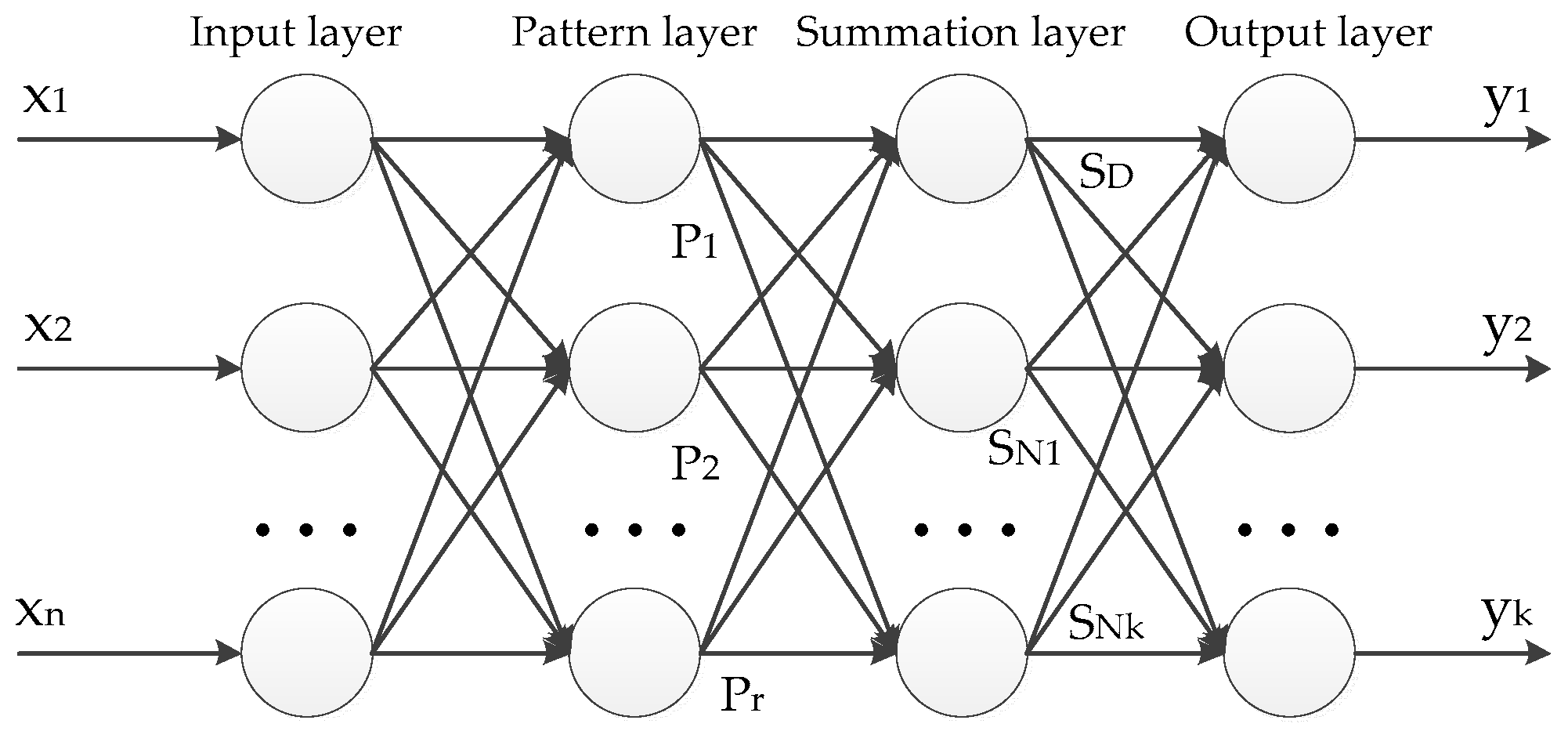
5. Optimal GRNN Classifier Design
- (1)
- Summing all outputs of mode layers directly, i.e., the connection weight between each pattern layer neuron and summation layer neuron is 1. The transfer function can be denoted as:
- (2)
- Summing all outputs of mode layers with weight , the transfer function can be denoted as:where is the weight between i-th neuron of pattern layer and j-th neuron of summation layer.
6. Experimental Results and Analysis
6.1. Signal Collection
6.2. Signal Decomposition and Feature Extraction
- (1)
- It can be seen that the characteristic curves of same type of signal obtained by EWT-TFE and WTFE methods are more dispersed than the EWT-ITFE ones, this indicates that the EWT-ITFE method can better highlight the similarity between the same type of signal.
- (2)
- It also can be seen that the overall trend of characteristic curves of different types of signals obtained by EWT-TFE and WTFE methods have a certain degree of similarity, especially the frequency domain features of Normal, Fault I and Fault II (as shown in Figure 15b,c). While for EWT-ITFE method, the characteristic curves between different types of signals are obvious different. These indicate that the EWT-ITFE method can better highlight the differences between different types of signals.
6.3. Classification by Using K-CV and GRNN
7. Conclusions
- (1)
- Compared with EMD, EEMD, IF and VMD methods, the EWT method can better decompose the signals into a series of physically meaningful modes, while the VMD method is difficult to determine the value of parameter K and other remain mentioned methods contain the false modes.
- (2)
- Compared with EWT-TFE and WTFE feature extraction method, the proposed EWT-ITFE method is more superior in feature extraction. The feature curves of different types of signals obtained by EWT-ITFE method are more dispersed than other two method, this is good for classification.
- (3)
- GRNN has the parameter spread needs to be determined, it usually depends on human choice. Combined with K-CV, the loop traversal method can effectively find the best value of parameter.
- (4)
- According to the final recognition rates, the EWT-ITFE feature extraction method and the optimal GRNN classifier are more suitable for mechanical fault diagnosis of HVCBs, the signal features obtained by EWT-ITFE method are more significant, and the optimal GRNN classifier is more robust. The proposed EWT-ITFE method provides a new idea for mechanical feature extraction of HVCBs.
- (5)
- According to the final recognition rates, the fault diagnosis results mainly depend on the feature extraction method and classifier.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Heising, C.R.; Janssen, A.L.J.; Lanz, W.; Colombo, E. Summary of cigre 13.06 working group world wide reliability data and maintenance cost data on high voltage circuit breakers above 63 KV. In Proceedings of the 1994 IEEE Industry Applications Society Annual Meeting, Denver, CO, USA, 2–6 October 1994. [Google Scholar]
- Huang, N.T.; Zhang, S.X.; Cai, G.W.; Xu, D.G. Mechanical fault diagnosis of high voltage circuit breakers utilizing empirical wavelet transform and one-class support vector machine. Chin. J. Sci. Instrum. 2015, 36, 2773–2781. [Google Scholar]
- Sun, L.J.; Hu, X.G.; Ji, Y.C. Fault diagnosis for high voltage circuit breakers with improved characteristic entropy of wavelet packet. Proc. CSEE 2007, 27, 103–108. [Google Scholar]
- Chang, G.; Wang, Y.; Wang, W. Mechanical fault diagnosis of high voltage circuit breakers utilizing zero-phase filter time-frequency entropy of vibration signal. Proc. CSEE 2013, 33, 155–162. [Google Scholar]
- Chen, W.G.; Deng, B.F. Applying wavelet packet energy entropy and neural networks to diagnose circuit breaker faults. J. Chongqing Univ. 2008, 31, 744–765. [Google Scholar]
- Xu, J.Y.; Zhang, B.; Lin, X.; Li, B.; Teng, Y. Application of energy spectrum entropy vector method and RBF neural networks optimized by the particle swarm in high-voltage circuit breaker mechanical fault diagnosis. High Volt. Eng. 2012, 38, 1299–1306. [Google Scholar]
- Huang, J.; Hu, X.G.; Geng, X. An intelligent fault diagnosis method of high voltage circuit breaker based on improved EMD energy entropy and multi-class support vector machine. Electr. Power Syst. Res. 2011, 81, 400–407. [Google Scholar] [CrossRef]
- Huang, J.; Hu, X.G.; Yang, F. Support vector machine with genetic algorithm for machinery fault diagnosis of high voltage circuit breaker. Measurement 2011, 44, 1018–1027. [Google Scholar] [CrossRef]
- Huang, N.T.; Fang, L.H.; Cai, G.W.; Xu, D.G.; Chen, H.J.; Nie, Y.H. Mechanical fault diagnosis of high voltage circuit breakers with unknown fault type using hybrid classifier based on LMD and time segmentation energy entropy. Entropy 2016, 18, 322. [Google Scholar] [CrossRef]
- Huang, N.T.; Chen, H.J.; Cai, G.W.; Fang, L.H.; Wang, Y.Q. Mechanical Fault Diagnosis of High Voltage Circuit Breakers Based on Variational Mode Decomposition and Multi-Layer Classifier. Sensors 2016, 16, 1887. [Google Scholar] [CrossRef] [PubMed]
- Huang, N.T.; Chen, H.J.; Zhang, S.X.; Cai, G.W.; Li, W.G.; Xu, D.G.; Fang, L.H. Mechanical Fault Diagnosis of High Voltage Circuit Breakers Based on Wavelet Time-Frequency Entropy and One-Class Support Vector Machine. Entropy 2016, 18, 7. [Google Scholar] [CrossRef]
- Sun, S.G.; Yu, H.; Du, T.H.; Wang, J.Q.; Zhao, L.Y. Vibration and acoustic joint fault diagnosis of conventional circuit breaker based on multi-feature fusion and improved QPSO-RVM. Trans. Chin. Electrotec. Soc. 2017, 32, 107–117. [Google Scholar] [CrossRef]
- Charbkaew, N.; Suwanasri, T.; Bunyagul, T.; Schnettler, A. Vibration signal analysis for condition monitoring of puffer-type high-voltage circuit breakers using wavelet transform. IEEJ Trans. Electr. Electr. Eng. 2012, 7, 13–22. [Google Scholar] [CrossRef]
- Landry, M.; Leonard, F.; Landry, C.; Beauchemin, R.; Turcotte, O.; Brikci, F. An Improved Vibration Analysis Algorithm as a Diagnostic Tool for Detecting Mechanical Anomalies on Power Circuit Breakers. IEEE Trans. Power Deliv. 2008, 23, 1986–1994. [Google Scholar] [CrossRef]
- He, Y. Vibration signal acquisition system of engine based on LabVIEW. Manuf. Autom. 2010, 32, 196–198. [Google Scholar]
- Zhao, Y.B.; Zhou, Y.L. Data acquisition system based on labview. J. Qingdao Univ. Sci. Technol. 2005, 26, 452–454. [Google Scholar]
- Yu, B.; Xu, X.J. Research on vibration fault diagnosis of rotating machinery based on support vector machine. Electr. Des. Eng. 2016, 24, 104–107. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Jia, F.; Wu, B.; Xiong, X.Y.; Xiong, S.B. Intelligent diagnosis of bearing based on EMD and multifractal detrended fluctuation analysis. J. Cent. South Univ. 2015, 46, 491–497. [Google Scholar]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Lee, D.H.; Ahn, J.H.; Koh, B.H. Fault detection of bearing systems through EEMD and optimization algorithm. Sensors 2017, 17, 2477. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Wang, Y.; Zhou, H.M. Iterative filtering as an alternative algorithm for empirical mode decomposition. Adv. Adapt. Data Anal. 2009, 1, 543–560. [Google Scholar] [CrossRef]
- Gilles, J. Empirical Wavelet Transform. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Iatsenko, D.; Mcclintock, P.V.; Stefanovska, A. Nonlinear mode decomposition: A noise-robust, adaptive decomposition method. Phys. Rev. E 2015, 92, 032916. [Google Scholar] [CrossRef] [PubMed]
- Cicone, A.; Liu, J.; Zhou, H. Adaptive local iterative filtering for signal decomposition and instantaneous frequency analysis. Appl. Comput. Harmon. Anal. 2016, 41, 384–411. [Google Scholar] [CrossRef]
- Ricci, R.; Pennacchi, P. Diagnostics of gear faults based on EMD and automatic selection of intrinsic mode functions. Mech. Syst. Signal Process 2011, 25, 821–838. [Google Scholar] [CrossRef]
- Ayenu-Prah, A.; Attoh-Okine, N. A criterion for selecting relevant intrinsic mode functions in empirical mode decomposition. Adv. Adapt. Data Anal. 2010, 2, 1–24. [Google Scholar] [CrossRef]
- Peng, Z.K.; Tse, P.W.; Chu, F.L. An improved Hilbert–Huang transform and its application in vibration signal analysis. J. Sound Vib. 2005, 286, 187–205. [Google Scholar] [CrossRef]
- Xiang, L.; Li, Y.Y. Application of empirical wavelet transform in fault diagnosis of rotary mechanisms. J. Chin. Soc. Power Eng. 2015, 35, 975–981. [Google Scholar]
- Feng, B.; Li, H.; Zheng, H.Q. Study on Fault Diagnosis for Bearings Based on Empirical Wavelet Transform. Bearing 2015, 12, 53–58. [Google Scholar]
- Du, T.J.; Chen, G.J.; Lei, Y. A Novel Method for Power System Harmonic Detection Based on Wavelet Transform with Aliasing Compensation. Proc. CSEE 2005, 25, 54–59. [Google Scholar]
- Yang, L.X.; Zhu, Y. High voltage circuit breaker fault diagnosis of probabilistic neural network. Power Syst. Prot. Contr. 2015, 43, 62–67. [Google Scholar]
- Specht, D.F. Probabilistic neural networks and the polynomial Adaline as complementary techniques for classification. IEEE Trans. Neural Net. 1990, 1, 111–121. [Google Scholar] [CrossRef] [PubMed]
- Specht, D.F. A general regression neural network. IEEE Trans. Neural Net. 1991, 2, 568–576. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Tan, J.W.; Yu, K. Fault diagnosis tests research of rolling bearing based on EEMD-GRNN network. Manuf. Technol. Mach. Tool 2016, 3, 55–60. [Google Scholar]
- Li, S.; Tan, J.W.; Yu, K. Research on fault diagnosis of rolling bearing by Tom GRNN network. Manuf. Technol. Mach. Tool 2016, 3, 55–60. [Google Scholar]
- Daubechies, I. Ten Lectures On Wavelets. CBMS-NSF Ser. Appl. Math. 1991, 6, 1671. [Google Scholar]
- Meng, Y.P.; Jia, S.L.; Shi, Z.Q.; Rong, M.Z. The detection of the closing moments of a vacuum circuit breaker by vibration analysis. IEEE Trans. Power Deliv. 2006, 21, 652–658. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vibration Event | /ms | /Hz | ||
|---|---|---|---|---|
| 15 | 1200 | 0.1 | 85 | |
| 21 | 4000 | 0.3 | 95 | |
| 25 | 5500 | 1.0 | 75 | |
| 34 | 7000 | 0.5 | 60 | |
| 51 | 2300 | 0.2 | 45 |
| Item | Division Boundaries | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| frequency (Hz) | 0 | 1475 | 2425 | 2675 | 2875 | 3175 | 3725 | 5825 | 12430 | – | |
| Serial number | 1 | 30 | 49 | 54 | 58 | 64 | 75 | 117 | 249 | 400 | – |
| time (ms) | 0 | 23.23 | 24.05 | 24.75 | 26.4 | 33 | 35.15 | 37 | 39.78 | 46.11 | 200 |
| sampling point | 1 | 929 | 962 | 990 | 1056 | 1320 | 1406 | 1480 | 1591 | 1844 | 7998 |
| Types | Outputs | |||||||
|---|---|---|---|---|---|---|---|---|
| y1 | y2 | y3 | y4 | |||||
| Expected | Practical | Expected | Practical | Expected | Practical | Expected | Practical | |
| Normal | 1 | 0.8977 | 0 | 0.0936 | 0 | 0.0080 | 0 | 0.0006 |
| Normal | 1 | 0.9173 | 0 | 0.0765 | 0 | 0.0057 | 0 | 0.0005 |
| Normal | 1 | 0.9352 | 0 | 0.0621 | 0 | 0.0024 | 0 | 0.0002 |
| Normal | 1 | 0.9109 | 0 | 0.0816 | 0 | 0.0070 | 0 | 0.0005 |
| Normal | 1 | 0.9227 | 0 | 0.0627 | 0 | 0.0136 | 0 | 0.0010 |
| Fault I | 0 | 0.0000 | 1 | 0.9386 | 0 | 0.0613 | 0 | 0.0001 |
| Fault I | 0 | 0.0001 | 1 | 0.9423 | 0 | 0.0566 | 0 | 0.0009 |
| Fault I | 0 | 0.0000 | 1 | 0.9232 | 0 | 0.0767 | 0 | 0.0002 |
| Fault I | 0 | 0.2902 | 1 | 0.6511 | 0 | 0.0512 | 0 | 0.0074 |
| Fault I | 0 | 0.7006 | 1 | 0.2401 | 0 | 0.0533 | 0 | 0.0060 |
| Fault II | 0 | 0.0027 | 0 | 0.0001 | 1 | 0.9384 | 0 | 0.0588 |
| Fault II | 0 | 0.0038 | 0 | 0.0002 | 1 | 0.9322 | 0 | 0.0638 |
| Fault II | 0 | 0.0024 | 0 | 0.0002 | 1 | 0.9369 | 0 | 0.0605 |
| Fault II | 0 | 0.0016 | 0 | 0.0001 | 1 | 0.9327 | 0 | 0.0656 |
| Fault II | 0 | 0.0011 | 0 | 0.0001 | 1 | 0.9396 | 0 | 0.0593 |
| Fault III | 0 | 0.0787 | 0 | 0.0004 | 0 | 0.0773 | 1 | 0.8436 |
| Fault III | 0 | 0.0841 | 0 | 0.0003 | 0 | 0.0722 | 1 | 0.8434 |
| Fault III | 0 | 0.0888 | 0 | 0.0002 | 0 | 0.0583 | 1 | 0.8527 |
| Fault III | 0 | 0.0497 | 0 | 0.0002 | 0 | 0.0945 | 1 | 0.8555 |
| Fault III | 0 | 0.0552 | 0 | 0.0001 | 0 | 0.0634 | 1 | 0.8811 |
| Classifier | Feature Extraction Method (Parameter) | Recognition Rate | ||||
|---|---|---|---|---|---|---|
| Normal | Fault I | Fault II | Fault III | All Test Samples | ||
| GRNN | EWT-ITFE (spread = 0.9) | 100% | 90% | 100% | 100% | 97.5% |
| EWT-TFE (spread = 0.7) | 90% | 80% | 100% | 100% | 92.5% | |
| WTFE (spread = 1.2) | 80% | 80% | 100% | 100% | 90% | |
| RBFNN | EWT-ITFE (number of neurons in hidden layer = 12) | 100% | 90% | 90% | 100% | 95% |
| EWT-TFE (number of neurons in hidden layer = 23) | 90% | 80% | 90% | 100% | 90% | |
| WTFE (number of neurons in hidden layer = 31) | 70% | 70% | 90% | 100% | 82.5% | |
| BPNN | EWT-ITFE (number of neurons in hidden layer = 20) | 100% | 90% | 80% | 100% | 92.5% |
| EWT-TFE (number of neurons in hidden layer = 16) | 70% | 70% | 90% | 100% | 82.5% | |
| WTFE (number of neurons in hidden layer = 19) | 60% | 70% | 70% | 100% | 75% | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Liu, M.; Guo, Z.; Ji, Y. Mechanical Fault Diagnosis of High Voltage Circuit Breakers Utilizing EWT-Improved Time Frequency Entropy and Optimal GRNN Classifier. Entropy 2018, 20, 448. https://doi.org/10.3390/e20060448
Li B, Liu M, Guo Z, Ji Y. Mechanical Fault Diagnosis of High Voltage Circuit Breakers Utilizing EWT-Improved Time Frequency Entropy and Optimal GRNN Classifier. Entropy. 2018; 20(6):448. https://doi.org/10.3390/e20060448
Chicago/Turabian StyleLi, Bing, Mingliang Liu, Zijian Guo, and Yamin Ji. 2018. "Mechanical Fault Diagnosis of High Voltage Circuit Breakers Utilizing EWT-Improved Time Frequency Entropy and Optimal GRNN Classifier" Entropy 20, no. 6: 448. https://doi.org/10.3390/e20060448
APA StyleLi, B., Liu, M., Guo, Z., & Ji, Y. (2018). Mechanical Fault Diagnosis of High Voltage Circuit Breakers Utilizing EWT-Improved Time Frequency Entropy and Optimal GRNN Classifier. Entropy, 20(6), 448. https://doi.org/10.3390/e20060448