
Consensus of Second Order Multi-Agent Systems with Exogenous Disturbance Generated by Unknown Exosystems


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Problem Formulation
3. Designing of Internal Models
4. Main Result
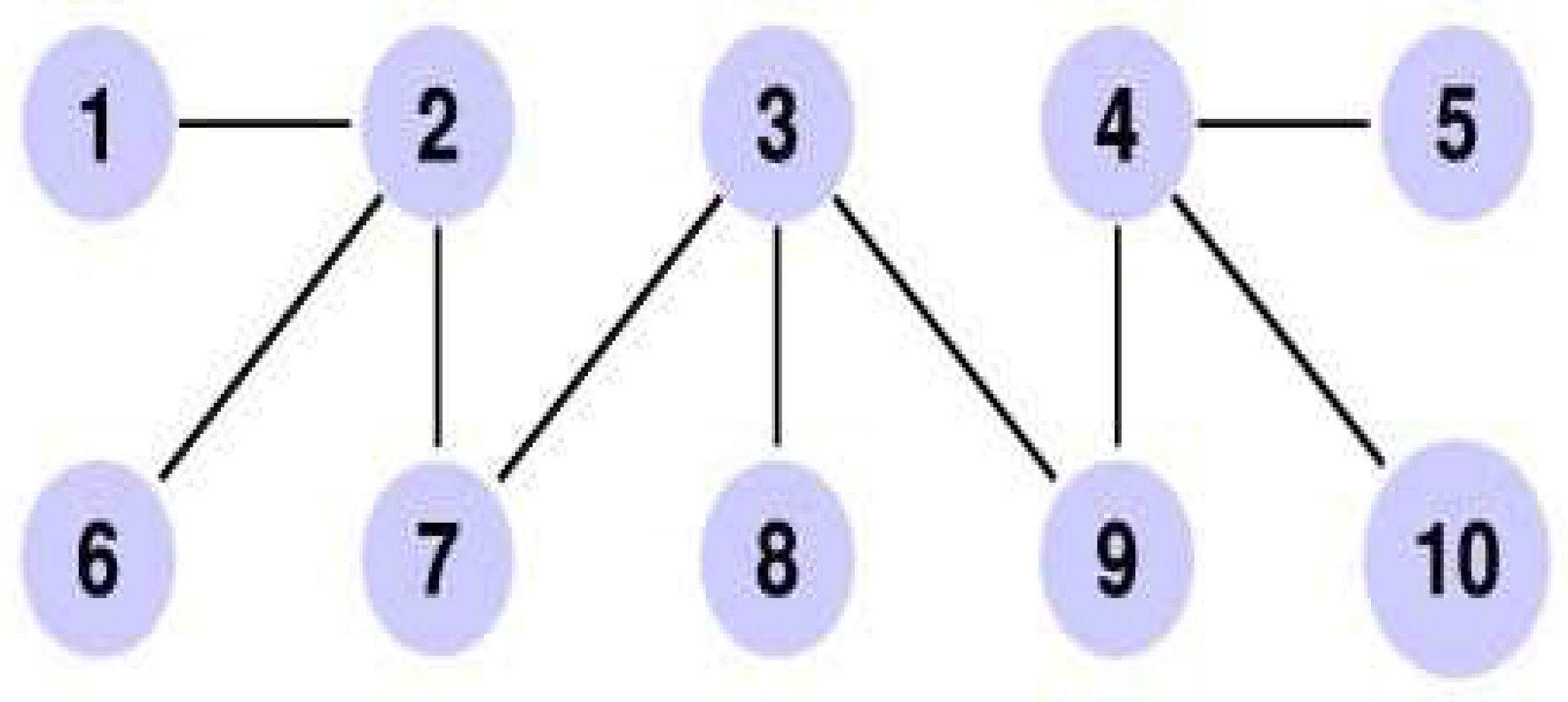
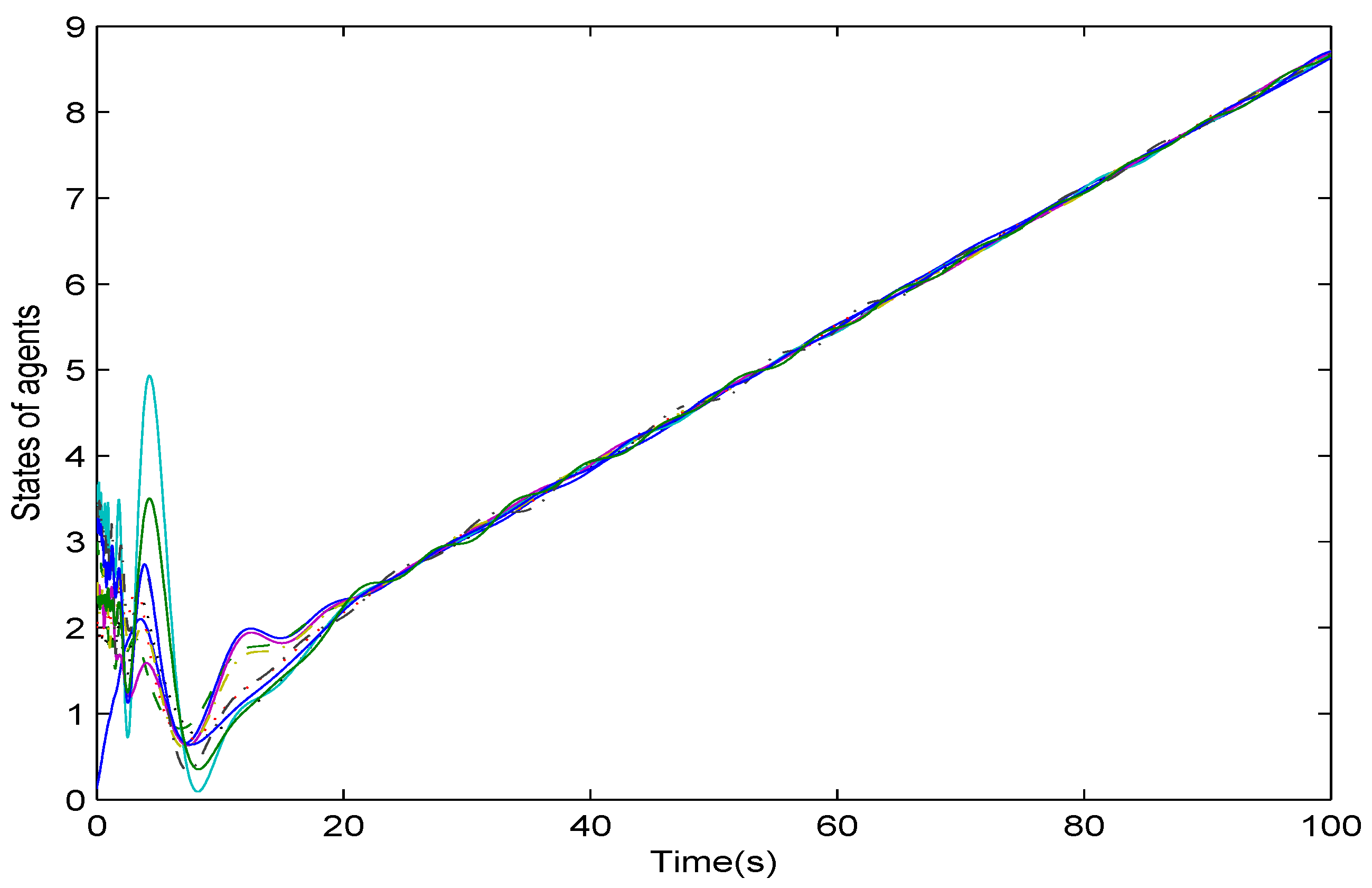
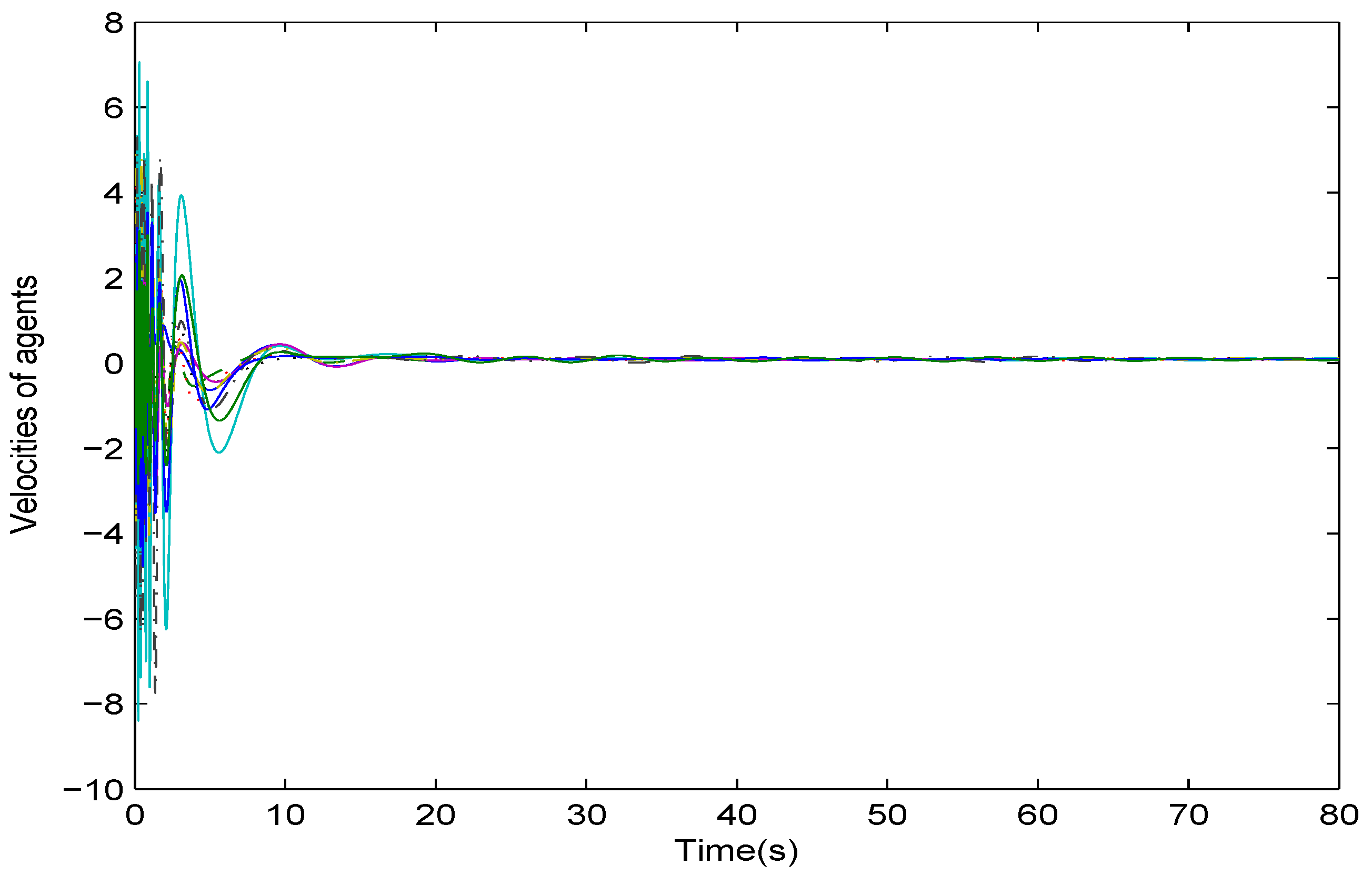
5. Illustrative Example
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, J.; Cao, X.; Cheng, P.; Xiao, Y.; Sun, Y. Distributed collaborative control for industrial automation with wireless sensor and actuator networks. IEEE Trans. Ind. Electron. 2010, 57, 4219–4230. [Google Scholar] [CrossRef]
- Cruz, D.; McClintock, J.; Perteet, B.; Orqueda, O.A.; Cao, Y.; Fierro, R. Decentralized cooperative control—A multivehicle platform for research in networked embedded systems. IEEE Control Syst. Mag. 2007, 27, 58–78. [Google Scholar] [CrossRef]
- Ni, W.; Cheng, D. Leader-following consensus of multi-agent systems under fixed and switching topologies. Syst. Control Lett. 2010, 59, 209–217. [Google Scholar] [CrossRef]
- Qin, J.; Yu, C.; Hirche, S. Stationary consensus of asynchronous discrete-time second-order multi-agent systems under switching topology. IEEE Trans. Ind. Inform. 2012, 8, 986–994. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W.; Atkins, E.M. Information consensus in multivehicle cooperative control. IEEE Control Syst. Mag. 2007, 2, 71–82. [Google Scholar] [CrossRef]
- Wang, X.; Yadav, V.; Balakrishnan, S. Cooperative UAV formation flying with obstacle/collision avoidance. IEEE Trans. Control Syst. Technol. 2007, 15, 672–679. [Google Scholar] [CrossRef]
- Zhang, H.; Lewis, F.L.; Qu, Z. Lyapunov, adaptive, and optimal design techniques for cooperative systems on directed communication graphs. IEEE Trans. Ind. Electron. 2012, 59, 3026–3041. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus protocols for networks of dynamic agents. In Proceedings of the 2003 American Controls Conference, Denver, CO, USA, 4–6 June 2003.
- De la Prieta, F.; Heras, S.; Palanca, J.; Rodríguez, S.; Bajo, J.; Julián, V. Real-time agreement and fulfilment of SLAs in Cloud Computing environments. AI Commun. 2015, 28, 403–426. [Google Scholar] [CrossRef]
- Garcia, A.; Sanchez-Pi, N.; Correia, L.; Molina, J.M. Multi-agent simulations for emergency situations in an airport scenario. Adv. Distrib. Comput. Artif. Intell. J. 2012, 1, 69–73. [Google Scholar]
- Song, J. Observer-Based Consensus Control for Networked Multi-Agent Systems with Delays and Packet-Dropouts. Int. J. Innov. Comput. Inf. Control 2016, 12, 1287–1302. [Google Scholar]
- Liang, H.; Kang, F. Artificial Immune Intelligent Modeling for UUV Underwater Navigation System Based on Immune Multi-Agents Network. Int. J. Innov. Comput. Inf. Control 2015, 11, 1525–1537. [Google Scholar]
- Wu, Y.; Su, H.; Shi, P.; Shu, Z.; Wu, Z.-G. Consensus of multi-agent systems using aperiodic sampled-data control. IEEE Trans. Cybern. 2016, 46, 2132–2143. [Google Scholar] [CrossRef] [PubMed]
- Shi, P.; Shen, Q. Cooperative control of multi-agent systems with unknown state-dependent controlling effects. IEEE Trans. Autom. Sci. Eng. 2015, 12, 827–834. [Google Scholar] [CrossRef]
- Modares, H.; Nageshrao, S.P.; Delgado Lopesb, G.A.; Babuškab, R.; Lewisa, F.L. Optimal model-free output synchronization of heterogeneous systems using off-policy reinforcement learning. Automatica 2016, 71, 334–341. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Sun, Y.G.; Wang, L.; Xie, G. Average consensus in networks of dynamic agents with switching topologies and multiple time-varying delays. Syst. Control Lett. 2008, 57, 175–183. [Google Scholar] [CrossRef]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2002, 48, 988–1001. [Google Scholar] [CrossRef]
- Bliman, P.-A.; Ferrari-Trecate, G. Average consensus problems in networks of agents with delayed communications. Automatica 2008, 44, 1985–1995. [Google Scholar] [CrossRef]
- Ren, W.; Atkins, E. Distributed multi-vehicle coordinated control via local information exchange. Int. J. Robust Nonlinear Control 2007, 17, 1002–1033. [Google Scholar] [CrossRef]
- Xie, G.; Wang, L. Consensus control for a class of networks of dynamic agents. Int. J. Robust Nonlinear Control 2007, 17, 941–959. [Google Scholar] [CrossRef]
- Hong, Y.; Gao, L.; Cheng, D.; Hu, J. Lyapunov-based approach to multiagent systems with switching jointly connected interconnection. IEEE Trans. Autom. Control 2007, 52, 943–948. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, M. Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems. Automatica 2010, 46, 1089–1095. [Google Scholar] [CrossRef]
- Chen, G.; Lewis, F.L. Robust consensus of multiple inertial agents with coupling delays and variable topologies. Int. J. Robust Nonlinear Control 2011, 21, 666–685. [Google Scholar] [CrossRef]
- Shen, Q.; Shi, P. Output consensus control of multi-agent systems with unknown nonlinear dead-zone. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1329–1337. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z.; Xie, L.; Liu, X. Distributed robust control of linear multi-agent systems with parameter uncertainties. Int. J. Control 2012, 85, 1039–1050. [Google Scholar] [CrossRef]
- Amster, P.; Mariani, M. Some results on the forced pendulum equation. Nonlinear Anal. Theory Methods Appl. 2008, 68, 1874–1880. [Google Scholar] [CrossRef]
- Ren, W. Synchronization of coupled harmonic oscillators with local interaction. Automatica 2008, 44, 3195–3200. [Google Scholar] [CrossRef]
- Andreasson, M.; Sandberg, H.; Dimarogonas, D.V.; Johansson, K.H. Distributed integral action: Stability analysis and frequency control of power systems. In Proceedings of the IEEE 51st Annual Conference on Decision and Control, Maui, HI, USA, 10–13 December 2012; pp. 2077–2083.
- Yang, H.; Zhang, Z.; Zhang, S. Consensus of second-order multi-agent systems with exogenous disturbances. Int. J. Robust Nonlinear Control 2011, 21, 945–956. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, X. Further results on consensus of second-order multi-agent systems with exogenous disturbance. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 3215–3226. [Google Scholar] [CrossRef]
- Nikiforov, V. Adaptive non-linear tracking with complete compensation of unknown disturbances. Eur. J. Control 1998, 4, 132–139. [Google Scholar] [CrossRef]
- Ding, Z. Asymptotic rejection of unknown sinusoidal disturbances in nonlinear systems. Automatica 2007, 43, 174–177. [Google Scholar] [CrossRef]
- Liu, L.; Chen, Z.; Huang, J. Parameter convergence and minimal internal model with an adaptive output regulation problem. Automatica 2009, 45, 1306–1311. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Ren, W. On consensus algorithms for double-integrator dynamics. IEEE Trans. Autom. Control 2008, 53, 1503–1509. [Google Scholar] [CrossRef]
- Horn, R.A.; Johnson, C.R. Topics in Matrix Analysis; Cambridge UP: New York, NY, USA, 1991. [Google Scholar]


© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhu, Q.; Liu, X. Consensus of Second Order Multi-Agent Systems with Exogenous Disturbance Generated by Unknown Exosystems. Entropy 2016, 18, 423. https://doi.org/10.3390/e18120423
Zhang X, Zhu Q, Liu X. Consensus of Second Order Multi-Agent Systems with Exogenous Disturbance Generated by Unknown Exosystems. Entropy. 2016; 18(12):423. https://doi.org/10.3390/e18120423
Chicago/Turabian StyleZhang, Xuxi, Qidan Zhu, and Xianping Liu. 2016. "Consensus of Second Order Multi-Agent Systems with Exogenous Disturbance Generated by Unknown Exosystems" Entropy 18, no. 12: 423. https://doi.org/10.3390/e18120423
APA StyleZhang, X., Zhu, Q., & Liu, X. (2016). Consensus of Second Order Multi-Agent Systems with Exogenous Disturbance Generated by Unknown Exosystems. Entropy, 18(12), 423. https://doi.org/10.3390/e18120423