Feature Point Registration Model of Farmland Surface and Its Application Based on a Monocular Camera


 ,
,
Abstract
1. Introduction
2. Theory and Method of Feature Point Registration
2.1. Theory of Image Registration
2.2. Image Registration Procedure
2.3. Method of Image Registration
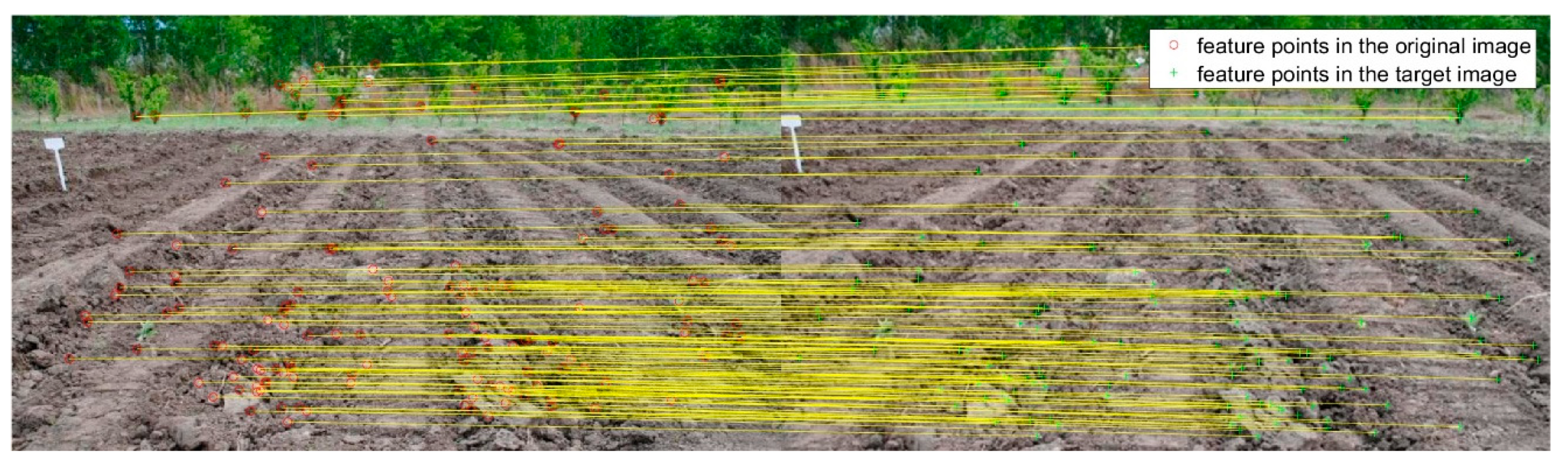
3. Field Feature Point Registration Model and Application
3.1. Comparation and Analyze of Detection Operator
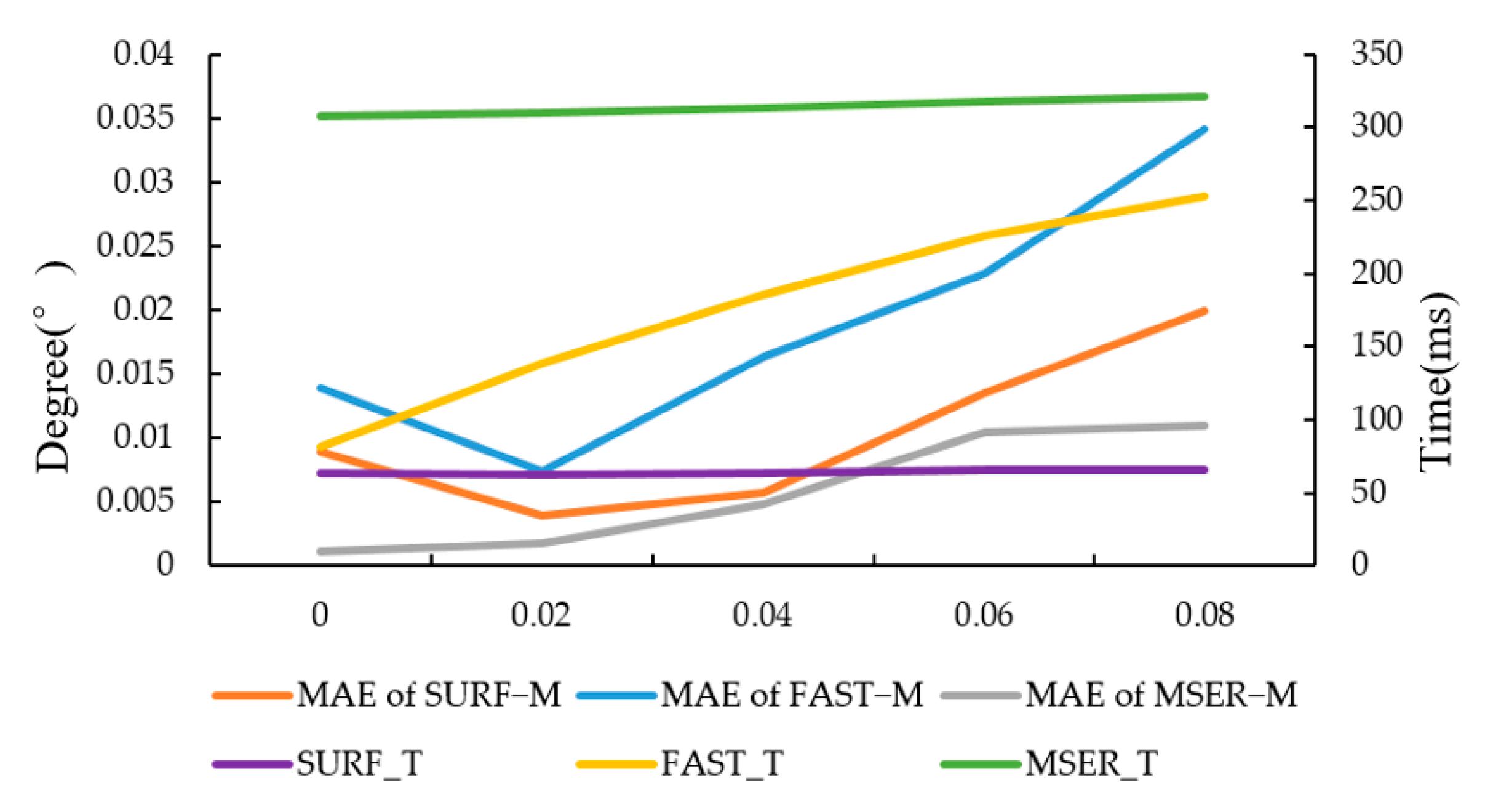
3.1.1. Experiment on the Effect of Scaling on Registration Accuracy
3.1.2. Experiment on the Effect of Noise on Registration Accuracy
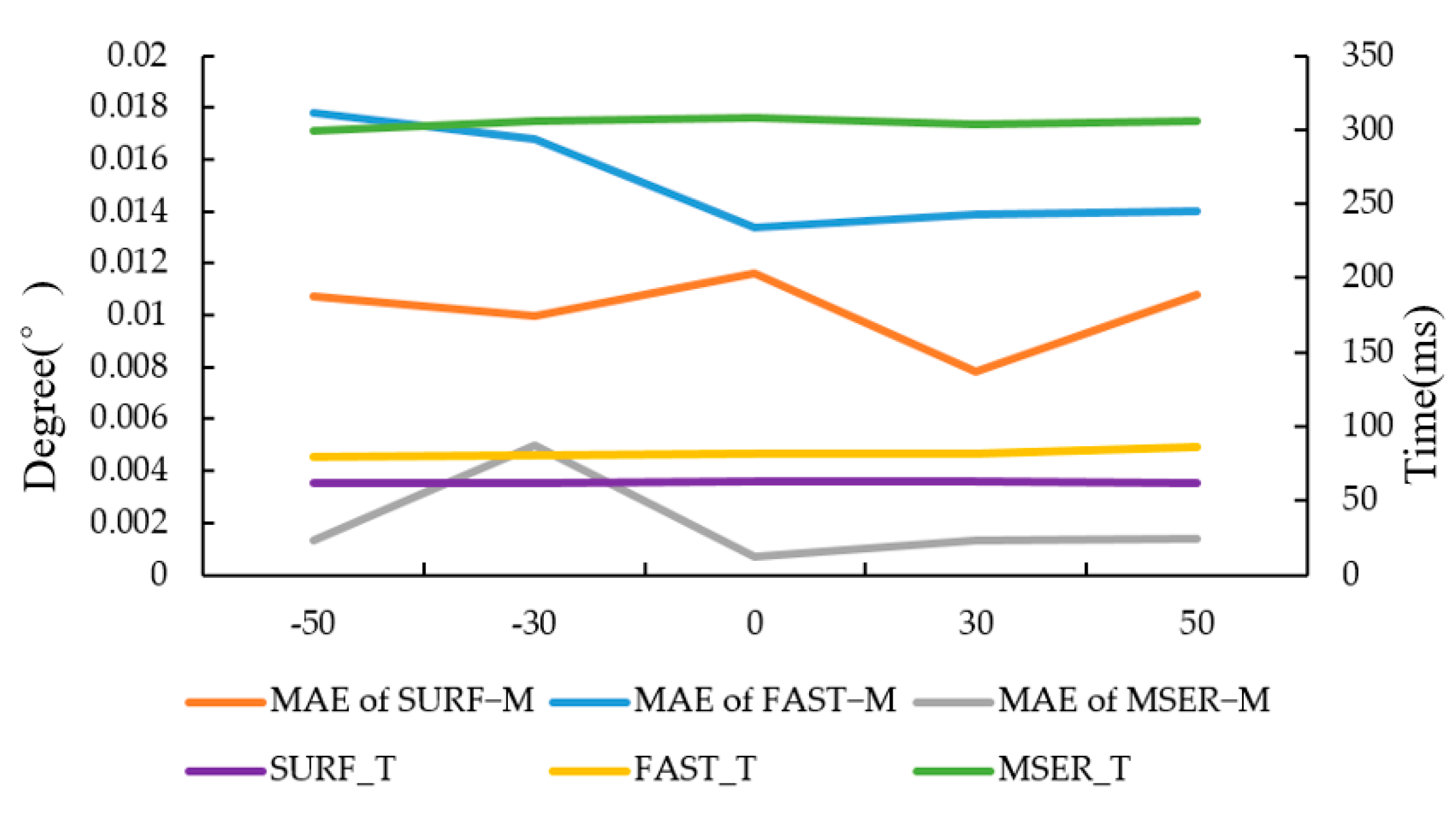
3.1.3. Experiment on the Effect of Brightness on Registration Accuracy
3.1.4. Conclusion and Discussion
3.2. Farmland Feature Point Registration Model and Procedure
3.2.1. Farmland Feature Point Registration Model
3.2.2. Procedure of Farmland Feature Point Registration
4. Field Test and Analyses
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lemley, J.; Kar, A.; Drimbarean, A.; Corcoran, P. Efficient CNN implementation for eye-gaze estimation on low-power/low-quality consumer imaging systems. arXiv 2018, arXiv:1806.10890. [Google Scholar]
- Lee, S.H.; Yang, C.S. A real time object recognition and counting system for smart industrial camera sensor. IEEE Sens. J. 2017, 17, 2516–2523. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, Y.; Liu, H.; Zhang, L.; Wang, H. Visual measurement of water level under complex illumination conditions. Sensors 2019, 19, 4141. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Chu, B.; Peng, J.; Tang, S. A Visual Measurement of water content of crude oil based on image grayscale accumulated value difference. Sensors 2019, 19, 2963. [Google Scholar] [CrossRef]
- Lin, Y.-T.; Lin, Y.-C.; Han, J.-Y. Automatic water-level detection using single-camera images with varied poses. Measurement 2018, 127, 167–174. [Google Scholar] [CrossRef]
- Hu, L.; Yang, W.; He, J.; Zhou, H.; Luo, X.; Zhao, R.; Tang, L.; Du, P. Roll angle estimation using low cost MEMS sensors for paddy field machine. Comput. Electron. Agric. 2019, 158, 183–188. [Google Scholar] [CrossRef]
- Altikat, S.; Celik, A. The effects of tillage and intra-row compaction on seedbed properties and red lentil emergence under dry land conditions. Soil Tillage Res. 2011, 114, 1–8. [Google Scholar] [CrossRef]
- Shi, G.; Li, X.; Jiang, Z. An improved yaw estimation algorithm for land vehicles using MARG sensors. Sensors 2018, 18, 3251. [Google Scholar] [CrossRef] [PubMed]
- Jin, X.; Yin, G.; Chen, N. Advanced estimation techniques for vehicle system dynamic state: A survey. Sensors 2019, 19, 4289. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, K.; Taniwaki, K.; Saito, H.; Seki, M.; Tamaki, K.; Nagasaka, Y. An autonomous rice transplanter guided by global positioning system and inertial measurement unit. J. Field Robot. 2009, 26, 537–548. [Google Scholar]
- Tong, X.; Li, Z.; Han, G.; Liu, N.; Su, Y.; Ning, J.; Yang, F. Adaptive EKF based on HMM recognizer for attitude estimation using MEMS MARG sensors. IEEE Sens. J. 2017, 18, 3299–3310. [Google Scholar] [CrossRef]
- Arakawa, M.; Okuyama, Y.; Mie, S.; Abderazek, B.A. Horizontal-based Attitude Estimation for Real-time UAV control. In Proceedings of the Seventeenth International Conference on Computer Applications, Yangon, Myanmar, 27 February–1 March 2019. [Google Scholar]
- Gakne, P.V.; O’Keefe, K. Monocular-based pose estimation using vanishing points for indoor image correction. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017. [Google Scholar]
- Timotheatos, S.; Piperakis, S.; Argyros, A.; Trahanias, P. Vision Based Horizon Detection for UAV Navigation. In Proceedings of the 27th International Conference on Robotics in Alpe-Adria-Danube Region, Patras, Greece, 6–8 June 2018; pp. 181–189. [Google Scholar]
- Wang, P.; Xu, G.; Cheng, Y.; Yu, Q. A simple, robust and fast method for the perspective-n-point Problem. Pattern Recognit. Lett. 2018, 108, 31–37. [Google Scholar] [CrossRef]
- Zhang, J.; Ren, L.; Deng, H.; Ma, M.; Zhong, X.; Wen, P. Measurement of unmanned aerial vehicle attitude angles based on a single captured image. Sensors 2018, 18, 2655. [Google Scholar] [CrossRef] [PubMed]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time single camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef]
- Bresson, G.; Alsayed, Z.; Yu, L.; Glaser, S. Simultaneous localization and mapping: A survey of current trends in autonomous driving. IEEE Trans. Intell. Veh. 2017, 2, 194–220. [Google Scholar] [CrossRef]
- Von Stumberg, L.; Usenko, V.; Engel, J.; Stückler, J.; Cremers, D. From monocular SLAM to autonomous drone exploration. In Proceedings of the 2017 European Conference on Mobile Robots (ECMR), Paris, France, 6–8 September 2017; pp. 1–8. [Google Scholar]
- Rosten, E.; Drummond, T. Machine learning for high-speed corner detection. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2006; pp. 430–443. [Google Scholar]
- Bay, H.; Tuytelaars, T.; Van, G.L. Surf: Speeded up robust features. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2006; pp. 404–417. [Google Scholar]
- Torr, P.H.S.; Zisserman, A. MLESAC: A new robust estimator with application to estimating image geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Salahat, E.; Saleh, H.; Sluzek, A.; Al-Qutayri, M.; Mohammad, B.; Ismail, M. A maximally stable extremal regions system-on-chip for real-time visual surveillance. In Proceedings of the IECON 2015-41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 2812–2815. [Google Scholar]
- Zhou, Z.; Shi, Y.; Gao, Z. Wildfire smoke detection based on local extremal region segmentation and surveillance. Fire Saf. J. 2016, 85, 50–58. [Google Scholar] [CrossRef]
- Ministry of Land and Resources of the People’s Republic of China (2013). The Communique of the Second National Land Survey Data Main Achievements [News Bulletin]. Available online: http://www.mnr.gov.cn/zwgk/zytz/201312/t20131230_1298865.htm (accessed on 29 June 2020).
- Malis, E.; Manuel, V. Deeper understanding of the homography decomposition for vision-based control. Res. Rep. 2007, RR–6303, 90. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Actual Value/° | Measurement/° | Absolute Error/° |
|---|---|---|---|
| 1 | 2.05 | 2.56 | 0.51 |
| 2 | 2.44 | 2.03 | 0.41 |
| 3 | 2.58 | 2.96 | 0.38 |
| 4 | 1.86 | 2.67 | 0.81 |
| 5 | 2.89 | 3.32 | 0.43 |
| 6 | −1.98 | −1.07 | 0.91 |
| 7 | −2.17 | −1.34 | 0.83 |
| 8 | −2.89 | −2.26 | 0.63 |
| 9 | −3.36 | −2.98 | 0.38 |
| 10 | −3.86 | −3.24 | 0.62 |
| 11 | 1.54 | 0.57 | 0.97 |
| 12 | −1.05 | −0.18 | 0.87 |
| 13 | −2.35 | −1.86 | 0.49 |
| 14 | −3.81 | −3.23 | 0.58 |
| 15 | −4.45 | −3.67 | 0.78 |
| 16 | −2.89 | −2.06 | 0.83 |
| 17 | −3.45 | −4.11 | 0.66 |
| 18 | −2.64 | −2.56 | 0.08 |
| 19 | 1.86 | 1.23 | 0.63 |
| 20 | 2.35 | 1.67 | 0.68 |
| 21 | 3.45 | 3.86 | 0.62 |
| 22 | 2.36 | 2.98 | 0.41 |
| 23 | −1.84 | −1.56 | 0.28 |
| 24 | 2.17 | 2.64 | 0.47 |
| 25 | 3.94 | 3.06 | 0.88 |
| Maximum Error | —— | —— | 0.97 |
| Minimum Error | —— | —— | 0.08 |
| Average Error | 0.61 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Huang, D.; Qi, J.; Chen, S.; Sun, H.; Liu, H.; Jia, H. Feature Point Registration Model of Farmland Surface and Its Application Based on a Monocular Camera. Sensors 2020, 20, 3799. https://doi.org/10.3390/s20133799
Li Y, Huang D, Qi J, Chen S, Sun H, Liu H, Jia H. Feature Point Registration Model of Farmland Surface and Its Application Based on a Monocular Camera. Sensors. 2020; 20(13):3799. https://doi.org/10.3390/s20133799
Chicago/Turabian StyleLi, Yang, Dongyan Huang, Jiangtao Qi, Sikai Chen, Huibin Sun, Huili Liu, and Honglei Jia. 2020. "Feature Point Registration Model of Farmland Surface and Its Application Based on a Monocular Camera" Sensors 20, no. 13: 3799. https://doi.org/10.3390/s20133799
APA StyleLi, Y., Huang, D., Qi, J., Chen, S., Sun, H., Liu, H., & Jia, H. (2020). Feature Point Registration Model of Farmland Surface and Its Application Based on a Monocular Camera. Sensors, 20(13), 3799. https://doi.org/10.3390/s20133799