
Econometric and Machine Learning Methods to Identify Pedestrian Crash Patterns





Abstract
1. Introduction
2. Crash Data
3. Method
3.1. The Mixed Logit Model
- xij are the characteristics that may potentially affect a pedestrian crash,
- βj are the parameters to be estimated,
- εij is the disturbance term.
- βj is the column vector of random parameters capturing unobserved crash-specific attributes,
- is the mean of βj random coefficient,
- is the standard deviations of the random coefficient.
- f is the β density function,
- describes the β coefficients density function in terms of mean and variance.
- LLfull represents the log-likelihood of the model of interest which includes all statistically significant variables,
- LL0 is the log-likelihood of the null model.
3.2. Machine Learning Models
3.2.1. Association Rules
- S(AB), S(A), and S(B) are respectively the supports of the rule, of the antecedent A, and of the consequent B,
- #(AB), #(A), and #(B) are respectively the number of crashes having the antecedent A and the consequent B, the number of crashes with A as antecedent, and the number of crashes with B as consequent,
- N is the total number of crashes in the dataset (874,847 total crashes).
- An−1 is the antecedent of the n-1 item rule,
- An is the antecedent of the n-item rule.
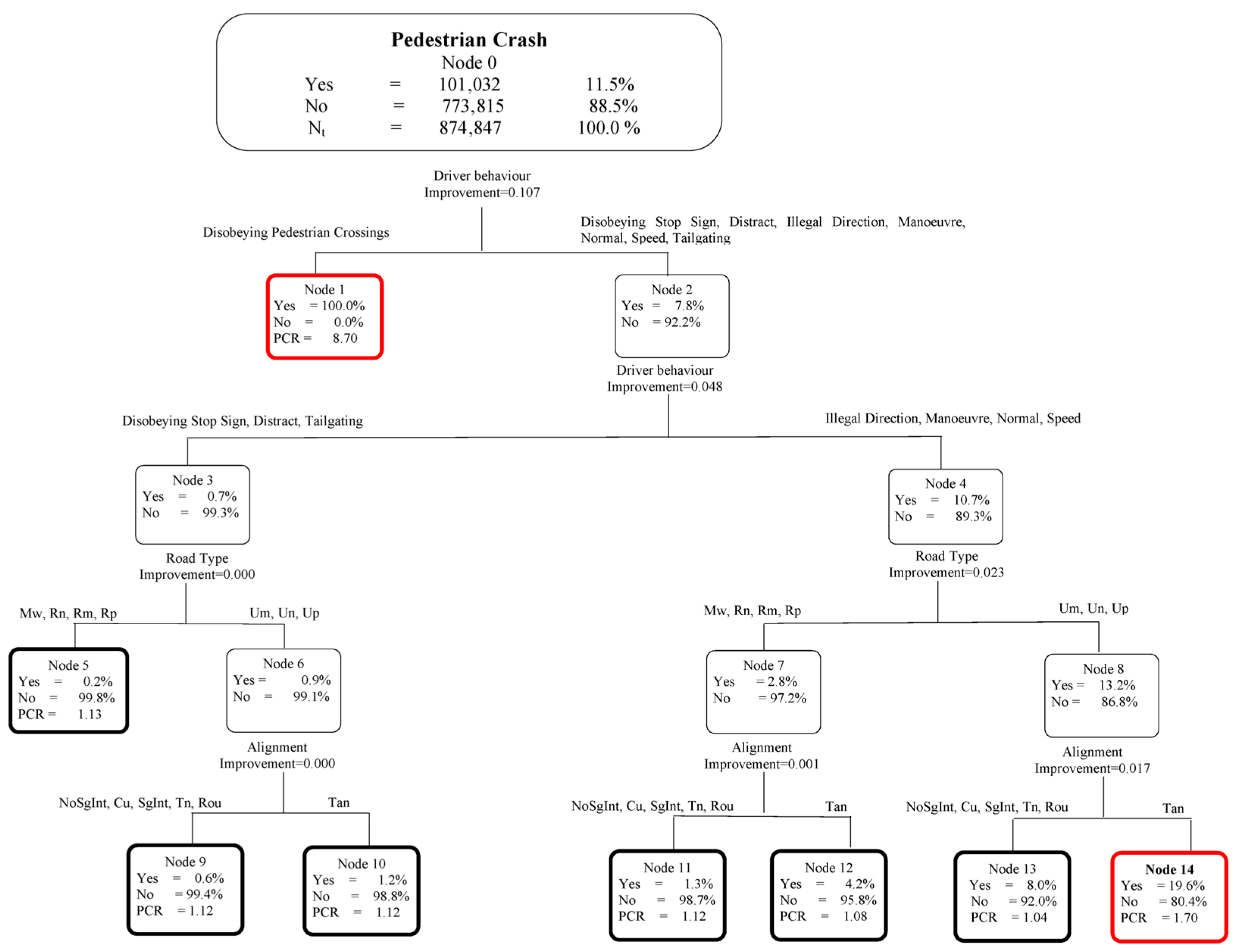
3.2.2. Classification Trees
- iY(t) is the node t impurity,
- p(j|t) represents the crashes in the node t belonging to class j.
- is the total impurity of a tree T
- p(t) = N(t)/N is the weight of the node t, N(t) is the number of crashes falling in node t whereas N is the total number of crashes,
- is the set of terminal nodes of the tree T.
- p(j|t) represents the crashes in the node t belonging to the class j,
- troot is the tree root node.
4. Results
4.1. Mixed Logit Model
4.1.1. Roadway
4.1.2. Environment
4.1.3. Vehicles
4.1.4. Drivers
4.2. Machine Learning Models
4.2.1. Roadway
4.2.2. Environment
4.2.3. Vehicles
4.2.4. Drivers
4.2.5. Interaction among Contributory Factors
5. Comparison between the Econometric and the Machine Learning Methods
5.1. Roadway
5.2. Environment
5.3. Vehicles
5.4. Drivers
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- ETSC, 2020. How Safe is Walking and Cycling in Europe? (PIN Flash 38). Available online: https://etsc.eu/wp-content/uploads/PIN-Flash-38_FINAL.pdf (accessed on 3 October 2022).
- United Nations. The Sustainable Development Goals Report. 2022. Available online: https://unstats.un.org/sdgs/report/2022/ (accessed on 3 October 2022).
- Department for Transport—DfT, 2017. Cycling and Walking Investment Strategy. Available online: http://bit.ly/2BRtQ35 (accessed on 5 October 2022).
- Liikenne- ja Viestintäministeriö, 2018. Kävelyn ja pyöräilyn edistämisohjelma. Available online: https://bit.ly/33vxR98 (accessed on 5 October 2022).
- Istat, National Institute of Statistics, 2019. Road accidents in Italy, year 2018. Available online: https://www.istat.it/en/archivio/232376 (accessed on 5 October 2022).
- Zegeer, C.V.; Bushell, M. Pedestrian crash trends and potential countermeasures from around the world. Acc. Anal. Prev. 2012, 44, 3–11. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Fan, W.D. A multinomial logit model of pedestrian-vehicle crash severity in North Carolina. Int. J. Transp. Sci. Technol. 2019, 8, 43–52. [Google Scholar] [CrossRef]
- Casado-Sanz, N.; Guirao, B.; Galera, A.L.; Attard, M. Investigating the Risk Factors Associated with the Severity of the Pedestrians Injured on Spanish Crosstown Roads. Sustainability 2019, 11, 5194. [Google Scholar] [CrossRef]
- Noh, Y.; Kim, M.; Yoon, Y. Elderly pedestrian safety in a rapidly aging society—Commonality and diversity between the younger-old and older-old. Traffic Inj. Prev. 2018, 19, 874–879. [Google Scholar] [CrossRef] [PubMed]
- Olszewski, P.; Szagala, P.; Wolanski, M.; Zielinska, A. Pedestrian fatality risk in accidents at unsignalized zebra crosswalksin Poland. Acc. Anal. Prev. 2015, 84, 83–91. [Google Scholar] [CrossRef] [PubMed]
- Pour-Rouholamin, M.; Zhou, H. Investigating the risk factors associated with pedestrian injury severity in Illinois. J. Saf. Res. 2016, 57, 9–17. [Google Scholar] [CrossRef]
- Yasmin, S.; Eluru, S.; Ukkusuri, S. Alternative Ordered Response Frameworks for Examining Pedestrian Injury Severity in New York City. J. Transp. Saf. Secur. 2014, 6, 275–300. [Google Scholar] [CrossRef]
- Rella Riccardi, M.; Mauriello, F.; Sarkar, S.; Galante, F.; Scarano, A.; Montella, A. Parametric and Non-Parametric Analyses for Pedestrian Crash Severity Prediction in Great Britain. Sustainability 2022, 14, 3188. [Google Scholar] [CrossRef]
- Rella Riccardi, M.; Mauriello, F.; Scarano, A.; Montella, A. Analysis of contributory factors of fatal pedestrian crashes by mixed logit model and association rules. Int. J. Inj. Contr. Saf. Promot. 2022, in press. [Google Scholar] [CrossRef]
- Haleem, K.; Alluri, P.; Gan, A. Analyzing pedestrian crash injury severity at signalized and non-signalized locations. Acc. Anal. Prev. 2015, 81, 14–23. [Google Scholar] [CrossRef]
- Islam, S.; Jones, S. Pedestrian at-fault crashes on rural and urban roadways in Alabama. Acc. Anal. Prev. 2014, 72, 267–276. [Google Scholar] [CrossRef]
- Tulu, G.S.; Washington, S.; Haque, M.; King, M. Injury severity of pedestrians involved in road traffic crashes in Addis Ababa, Ethiopia. J. Transp. Saf. 2017, 9, 47–66. [Google Scholar] [CrossRef]
- Zhai, X.; Huang, H.; Sze, N.N.; Song, Z.; Hon, K.K. Diagnostic analysis of the effects of weather condition on pedestrian crash severity. Acc. Anal. Prev. 2019, 122, 3118–3324. [Google Scholar] [CrossRef]
- Milton, J. Highway accident severities and the mixed logit model: An exploratory empirical analysis. Acc. Anal. Prev. 2006, 40, 260–266. [Google Scholar] [CrossRef]
- Washington, S.P.; Karlaftis, M.G.; Mannering, F.L. Statistical and Econometric Methods for Transportation Data Analysis, 3rd ed.; Chapman and Hall/CRC: Boca Raton, FL, USA, 2020. [Google Scholar]
- Mannering, F.L.; Bhat, C.R.; Shankar, V.; Abdel-Aty, M. Big data, traditional data and the tradeoffs between prediction and causality in highway-safety analysis. Anal. Methods Accid. Res. 2020, 25, 100113. [Google Scholar] [CrossRef]
- Besharati, M.M.; Kashani, A.T. Which set of factors contribute to increase the likelihood of pedestrian fatality in road crashes? Int. J. Inj. Control Saf. Promot. 2017, 25, 247–256. [Google Scholar] [CrossRef]
- Das, S.; Avelar, R.; Dixon, K.; Sun, X. Investigation on the wrong way driving crash patterns using multiple correspondence analysis. Acc. Anal. Prev. 2018, 111, 43–55. [Google Scholar] [CrossRef]
- Jung, S.; Qin, X.; Oh, C. Improving strategic policies for pedestrian safety enhancement using classification tree modeling. Transp. Res. Part A Policy Pract. 2016, 85, 53–64. [Google Scholar] [CrossRef]
- Pour, T.A.; Moridpour, S.; Tay, R.; Rajabifard, A. Modelling pedestrian crash severity at mid-blocks. Transp. A 2017, 13, 273–297. [Google Scholar] [CrossRef]
- Sivasankaran, S.K.; Natarajan, P.; Balasubramanian, V. Identifying Patterns of Pedestrian Crashes in Urban Metropolitan Roads in India using Association Rule Mining. Transp. Res. Procedia 2020, 48, 3496–3507. [Google Scholar] [CrossRef]
- Montella, A.; de Oña, R.; Mauriello, F.; Rella Riccardi, M.; Silvestro, G. A data mining approach to investigate patterns of powered two-wheeler crashes in Spain. Acc. Anal. Prev. 2020, 134, 105251. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Yan, X.; Yu, A.; Hentenryck, P.V. Prediction and behavioral analysis of travel mode choice: A comparison of machine learning and logit models. Travel. Behav. Soc. 2020, 20, 22–35. [Google Scholar] [CrossRef]
- Mokhtarimousavi, S.; Anderson, J.C.; Hadi, M.; Azizinamini, A. A temporal investigation of crash severity factors in worker-involved work zone crashes: Random parameters and machine learning approaches. Transp. Res. Interdiscip. Perspect. 2021, 10, 100378. [Google Scholar] [CrossRef]
- Montella, A.; Chiaradonna, S.; Criscuolo, G.; De Martino, S. Development and evaluation of a web-based software for crash data collection, processing and analysis. Acc. Anal. Prev. 2019, 130, 108–116. [Google Scholar] [CrossRef] [PubMed]
- Agrawal, R.; Imielinski, T.; Swami, A. Mining association rules between sets of items in large databases. In Proceedings of the 1993 ACM SIGMOD International Conference on Management of Data, Washington, DC, USA, 25–28 May 1993; pp. 207–216. [Google Scholar] [CrossRef]
- López, G.; Abellán, J.; Montella, A.; de Oña, J. Patterns of Single-Vehicle Crashes on Two-Lane Rural Highways in Granada Province, Spain: In-Depth Analysis through Decision Rules. Transp. Res. Rec. 2014, 2432, 133–141. [Google Scholar] [CrossRef]
- Montella, A.; Mauriello, F.; Pernetti, M.; Rella Riccardi, M. Rule discovery to identify patterns contributing to overrepresentation and severity of run-off-the-road crashes. Acc. Anal. Prev. 2021, 155, 106119. [Google Scholar] [CrossRef]
- Moral-Garcia, S.; Castellano, J.G.; Mantas, J.G.; Montella, A.; Abellan, J. Decision tree ensemble method for analyzing traffic accidents of novice drivers in urban areas. Entropy 2019, 21, 360. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees; Wadsworth International Group: Belmont, CA, USA, 1984. [Google Scholar]
- Montella, A.; Guida, C.; Mosca, J.; Lee, J.; Abdel-Aty, M. Systemic approach to improve safety of urban unsignalized intersections: Development and validation of a Safety Index. Acc. Anal. Prev. 2020, 141, 105523. [Google Scholar] [CrossRef]
- Montella, A.; Chiaradonna, S.; Claudi, A.; Lovegrove, G.; Nunziante, P.; Rella Riccardi, M. Sustainable complete streets design criteria and case study in Naples, Italy. Sustainability 2022, 14, 13142. [Google Scholar] [CrossRef]
- Stoker, P.; Carfinkel-Castro, A.; Khayesi, M.; Odero, W.; Mwangi, M.N.; Peden, M.; Ewing, R. Pedestrian safety and the built environment: A review of the risk factors. J. Plann. Lit. 2015, 30, 377–392. [Google Scholar] [CrossRef]
- Tinessa, F.; Pagliara, F.; Biggiero, L.; Delli Veneri, G. Walkability, accessibility to metro stations and retail location choice: Some evidence from the case study of Naples. Res. Transp. Bus. Manag. 2021, 40, 100549. [Google Scholar] [CrossRef]
- Cottrill, C.D.; Thakuriah, P. Evaluating pedestrian crashes in areas with high low-income or minority populations. Acc. Anal. Prev. 2010, 42, 1718–1728. [Google Scholar] [CrossRef]
- Cafiso, S.; Montella, A.; D’Agostino, C.; Mauriello, F.; Galante, F. Crash modification functions for pavement surface condition and geometric design indicators. Acc. Anal. Prev. 2021, 149, 105887. [Google Scholar] [CrossRef]
- Wang, X.; Yang, J.; Lee, C.; Ji, Z.; You, S. Macro-level safety analysis of pedestrian crashes in Shanghai, China. Acc. Anal. Prev. 2016, 96, 12–21. [Google Scholar] [CrossRef]
- Rodegerdts, L.; Bansen, J.; Tiesler, C.; Knudsen, J.; Myers, E.; Johnsonm, M.; Moule, M.; Persaud, B.; Lyon, C.; Hallmark, S.; et al. Roundabouts: An Informational Guide. In Transportation Research Board, 2nd ed.; NCHRP Report 672: Washington, DC, USA, 2010. [Google Scholar]
- Montella, A.; Turner, S.; Chiaradonna, S.; Aldridge, D. International overview of roundabout design practices and insights for improvement of the Italian standard. Can. J. Civ. Eng. 2013, 40, 1215–1226. [Google Scholar] [CrossRef]
- Montella, A. Roundabout in-service safety reviews: Safety assessment procedure. Transp. Res. Rec. 2007, 2019, 40–50. [Google Scholar] [CrossRef]
- Rella Riccardi, M.; Augeri, M.G.; Galante, F.; Mauriello, F.; Nicolosi, V.; Montella, A. Safety Index for evaluation of urban roundabouts. Acc. Anal. Prev. 2022, 158, 106858. [Google Scholar] [CrossRef]
- Distefano, L.; Leonardi, S.; Pulvirenti, G. Experimental analysis of pedestrian behavior at different configurations of crosswalks at roundabout legs. J. Eur. Transp. 2021, 85, 3. [Google Scholar] [CrossRef]
- IRAP. Road safety toolkit. Available online: https://toolkit.irap.org/safer-road-treatments/sight-distance-obstruction-removal/ (accessed on 20 September 2022).
- Fitzpatrick, K.; Turner, S.M.; Brewer, M.; Carlson, P.J.; Ullman, B.; Trout, N.D.; Park, E.S.; Whitacre, J.; Lalani, N.; Lord, D. TCRP Report 112/NCHRP Report 562: Improving Pedestrian Safety at Unsignalised Crossings; TRB of the National Academies: Washington, DC, USA, 2006. [Google Scholar]
- Lantieri, C.; Costa, M.; Vignali, V.; Acerra, E.M.; Marchetti, P.; Simone, A. Flashing in-curb LEDs and beacons at unsignalised crosswalks and driver’s visual attention to pedestrians during nighttime. Ergonomics 2021, 64, 330–341. [Google Scholar] [CrossRef]
- Zegeer, C.V.; Stutts, J.; Huang, H.; Cynecki, M.J.; Van Houten, H.; Alberson, B.; Pferer, R.; Neuman, T.R.; Slack, K.L.; Hardy, K.K. NCHRP Report 500: Guidance for Implementation of the AASHTO Strategic Highway Safety Plan 10: A Guide for Reducing Collisions Involving Pedestrians; TRB of the National Academies: Washington, DC, USA, 2004. [Google Scholar]
- Babić, D.; Babić, D.; Fiolić, M.; Ferko, M. Factors affecting pedestrian conspicuity at night: Analysis based on driver eye tracking. Saf. Sci. 2021, 139, 105257. [Google Scholar] [CrossRef]
- Li, Y.; Fan, W.D. Modelling severity of pedestrian-injury in pedestrian-vehicle crashes with latent class clustering and partial proportional odds model: A case study of North Carolina. Acc. Anal. Prev. 2019, 131, 284–296. [Google Scholar] [CrossRef] [PubMed]
- Salon, D.; McIntyre, A. Determinants of pedestrian and bicyclist crash severity by party at fault in San Francisco, CA. Acc. Anal. Prev. 2018, 110, 149–160. [Google Scholar] [CrossRef] [PubMed]
- Guo, Q.; Xu, P.; Pei, X.; Wong, S.C.; Yao, D. The effect of road network patterns on pedestrian safety: A zone-based Bayesian spatial modeling approach. Acc. Anal. Prev. 2017, 99, 114–124. [Google Scholar] [CrossRef] [PubMed]
- Su, J.; Sze, N.N.; Bai, L. A joint probability model for pedestrian crashes at macroscopic level: Roles of environment, traffic, and population characteristics. Acc. Anal. Prev. 2021, 150, 105898. [Google Scholar] [CrossRef]
- Solowczuk, A. Efficient Improvement of the Visibility of Pedestrians on Junctions in Tempo–30 Zones. IOP Conf. Ser. Mater. Sci. Eng. 2019, 603, 022042. [Google Scholar] [CrossRef]
- Szagala, P.; Brzezinski, A.; Kiec, M.; Budzynski, M.; Wachnicka, J.; Pazdan, S. Pedestrian Safety at Midblock Crossings on Dual Carriageway Roads in Polish Cities. Sustainability 2022, 14, 5703. [Google Scholar] [CrossRef]


{kind=link}
| Variable | Code | Total Crashes | Pedestrian Crashes | ||
|---|---|---|---|---|---|
| Count | % | Count | % | ||
| Total | - | 874,847 | 100.00 | 101,032 | 11.55 |
| Fatal crashes | - | 15,780 | 1.80 | 2969 | 18.81 |
| Injury crashes | - | 859,067 | 98.20 | 98,063 | 11.42 |
| Area | |||||
| Rural | R | 222,480 | 25.43 | 4878 | 2.19 |
| Urban | U | 652,367 | 74.57 | 96,154 | 14.74 |
| Road type | |||||
| Motorway | Mw | 46,519 | 5.32 | 330 | 0.71 |
| Rural national | Rn | 51,670 | 5.91 | 1059 | 2.05 |
| Rural provincial | Rp | 87,851 | 10.04 | 1851 | 2.11 |
| Rural municipal | Rm | 36,440 | 4.17 | 1638 | 4.50 |
| Urban national | Un | 31,247 | 3.57 | 3163 | 10.12 |
| Urban provincial | Up | 58,148 | 6.65 | 4968 | 8.54 |
| Urban municipal | Um | 562,972 | 64.35 | 88,023 | 15.64 |
| Alignment | |||||
| Curve | Cu | 91,279 | 10.43 | 4377 | 4.80 |
| Unsignalised Intersection | NoSgInt | 267,038 | 30.52 | 23,398 | 8.76 |
| Roundabout | Rou | 38,986 | 4.46 | 2141 | 5.49 |
| Signalised Intersection | SgInt | 55,432 | 6.34 | 6282 | 11.33 |
| Tangent | Tan | 407,489 | 46.58 | 63,334 | 15.54 |
| Tunnel | Tn | 3295 | 0.38 | 102 | 3.10 |
| Other | Ot | 11,328 | 1.29 | 1398 | 12.34 |
| Day of Week | |||||
| Weekday | Weekday | 649,063 | 74.19 | 80,030 | 12.33 |
| Weekend | Weekend | 225,784 | 25.81 | 21,002 | 9.30 |
| Season | |||||
| Autumn | Aut | 274,269 | 31.35 | 35,909 | 13.09 |
| Spring | Spr | 231,911 | 26.51 | 23,525 | 10.14 |
| Summer | Sum | 180,444 | 20.63 | 14,928 | 8.27 |
| Winter | Win | 188,223 | 21.51 | 26,670 | 14.17 |
| Lighting | |||||
| Day | Dy | 645,011 | 73.73 | 70,903 | 10.99 |
| Night | Nt | 229,836 | 26.27 | 30,129 | 13.11 |
| Pavement | |||||
| Dry | Dry | 724,291 | 82.79 | 83,117 | 11.48 |
| Slippery | Sl | 7574 | 0.87 | 236 | 3.12 |
| Snowy/Frozen | S/F | 3594 | 0.41 | 254 | 7.07 |
| Wet | Wt | 139,388 | 15.93 | 17,425 | 12.50 |
| Weather | |||||
| Clear | Cl | 727,506 | 83.16 | 82,796 | 11.38 |
| Fog | Fo | 8104 | 0.93 | 689 | 8.50 |
| High winds | HW | 1266 | 0.14 | 100 | 7.90 |
| Raining | Ra | 84,836 | 9.70 | 11,974 | 14.11 |
| Snowing | Sn | 2024 | 0.23 | 211 | 12.32 |
| Other | Ot | 51,111 | 5.84 | 5237 | 10.25 |
| Variable | Code | Total Crashes | Pedestrian Crashes | ||
|---|---|---|---|---|---|
| Count | % | Count | % | ||
| Vehicle type | |||||
| Bicycle | Bc | 26,310 | 3.01 | 1837 | 6.98 |
| Car | Car | 647,265 | 73.99 | 76,390 | 11.80 |
| PTW | PTW | 126,829 | 14.50 | 12,192 | 9.61 |
| Truck | Tr | 62,628 | 7.16 | 7004 | 5.52 |
| Other | Ot | 11,815 | 1.35 | 3609 | 30.55 |
| Vehicle age | |||||
| 0–10 | 0–10 | 407,491 | 46.58 | 49,600 | 0.12 |
| 10–20 | 10–20 | 185,593 | 21.21 | 20,888 | 0.11 |
| >20 | >20 | 25,960 | 2.97 | 2781 | 0.11 |
| Missing | Missing | 230,751 | 26.38 | 25,985 | 0.11 |
| Not applied | NA | 25,052 | 2.86 | 1778 | 0.07 |
| Vehicle defect | |||||
| Defect | Yes | 9129 | 1.04 | 306 | 3.35 |
| No defect | No | 865,718 | 98.96 | 100,726 | 11.63 |
| Driver behaviour | |||||
| Disobeying pedestrian crossing facility | DisobeyingPedCrossings | 35,563 | 4.07 | 35,563 | 100.00 |
| Disobeying stop sign | DisobeyingStop | 38,547 | 4.41 | 131 | 0.34 |
| Distraction | Distract | 127,166 | 14.54 | 808 | 0.64 |
| Illegal travel direction | IllegalDirection | 13,456 | 1.54 | 740 | 5.50 |
| Manoeuvring | Manoeuvre | 58,915 | 6.73 | 10,904 | 18.51 |
| Normal | Normal | 196,948 | 22.51 | 26,096 | 13.25 |
| Speeding | Speed | 90,375 | 10.33 | 9416 | 10.42 |
| Tailgating | Tailgating | 76,445 | 8.74 | 731 | 0.96 |
| Other | Ot | 237,432 | 27.14 | 16,643 | 7.01 |
| Driver psychophysical state | |||||
| Defective sight | DefSight | 2327 | 0.27 | 678 | 29.14 |
| Impaired | Impaired | 36,378 | 4.16 | 1212 | 3.33 |
| Normal | Normal | 836,142 | 95.58 | 99,142 | 11.86 |
| Driver age | |||||
| ≤17 | 0–17 | 13,808 | 1.58 | 1282 | 9.28 |
| 18–24 | 18–24 | 111,569 | 12.75 | 8474 | 7.60 |
| 25–44 | 25–44 | 331,223 | 37.86 | 30,389 | 9.17 |
| 45–54 | 45–54 | 171,496 | 19.60 | 20,074 | 11.71 |
| 55–64 | 55–64 | 109,128 | 12.47 | 14,238 | 13.05 |
| 65–74 | 65–74 | 68,683 | 7.85 | 10,710 | 15.59 |
| ≥75 | ≥75 | 52,073 | 5.95 | 9645 | 18.52 |
| Missing | Missing | 16,867 | 1.93 | 6220 | 36.88 |
| Driver gender | |||||
| Female | F | 235,184 | 26.88 | 24,467 | 10.40 |
| Male | M | 635,235 | 72.61 | 73,850 | 11.63 |
| Missing | Missing | 4428 | 0.51 | 2715 | 61.31 |
| Variable | β | OR | Std. Err. | p-Value | Variable | β | OR | Std. Err. | p-Value |
|---|---|---|---|---|---|---|---|---|---|
| Intercept | 0.44 | 1.56 | 0.01 | <0.001 | Vehicle Type | ||||
| Road type | Bicycle | −1.03 | 0.36 | 0.09 | <0.001 | ||||
| Motorway | −2.94 | 0.05 | 0.03 | <0.001 | PTW | −0.37 | 0.69 | 0.01 | <0.001 |
| Rural Municipal | −1.11 | 0.33 | 0.02 | <0.001 | Truck | 0.21 | 1.24 | 0.01 | <0.001 |
| Rural national | −2.00 | 0.14 | 0.02 | <0.001 | Car | ||||
| Rural provincial | −1.90 | 0.15 | 0.01 | <0.001 | Vehicle Age | ||||
| Urban national | −0.63 | 0.53 | 0.02 | <0.001 | 10–20 | −0.10 | 0.91 | 0.01 | <0.001 |
| Urban provincial | −0.75 | 0.47 | 0.01 | <0.001 | >20 | −0.19 | 0.83 | 0.02 | <0.001 |
| Urban Municipal | 0–10 | ||||||||
| Alignment | Vehicle Defect | ||||||||
| Curve | −0.83 | 0.44 | 0.01 | <0.001 | Yes | −0.56 | 0.57 | 0.04 | <0.001 |
| No Signalized Intersection | −0.97 | 0.38 | 0.01 | <0.001 | No | ||||
| Roundabout | −1.49 | 0.23 | 0.02 | <0.001 | Driver Behaviour | ||||
| Signalized Intersection | −0.82 | 0.44 | 0.01 | <0.001 | Disob. ped. crossing facility | −3.53 | 0.03 | 0.04 | <0.001 |
| Tunnel | −0.84 | 0.43 | 0.06 | <0.001 | Distraction | −3.23 | 0.04 | 0.02 | <0.001 |
| Tangent | Illegal travel direction | −0.77 | 0.46 | 0.02 | <0.001 | ||||
| Day of Week | Manoeuvring | 0.06 | 1.07 | 0.01 | <0.001 | ||||
| Weekend | −0.16 | 0.85 | 0.01 | <0.001 | Speeding | −0.17 | 0.84 | 0.01 | <0.001 |
| Weekday | Tailgating | −2.90 | 0.05 | 0.02 | <0.001 | ||||
| Season | Normal | ||||||||
| Autumn | 0.36 | 1.43 | 0.01 | <0.001 | Driver Psychophysical State | ||||
| Spring | 0.17 | 1.19 | 0.01 | <0.001 | Defective sight | 1.41 | 4.10 | 0.05 | <0.001 |
| Winter | 0.45 | 1.58 | 0.01 | <0.001 | Impaired | −0.81 | 0.45 | 0.02 | <0.001 |
| Summer | Normal | ||||||||
| Lighting | Driver Age | ||||||||
| Night | 0.22 | 1.25 | 0.01 | <0.001 | ≤17 | 0.17 | 1.18 | 0.02 | <0.001 |
| Day | 18–24 | −0.14 | 0.87 | 0.01 | <0.001 | ||||
| Pavement | 45–54 | 0.21 | 1.24 | 0.01 | <0.001 | ||||
| Snowy/Frozen | −0.41 | 0.67 | 0.06 | 0.00 | 55–64 | 0.30 | 1.35 | 0.01 | <0.001 |
| Slippery | −1.22 | 0.30 | 0.05 | <0.001 | 65–74 | 0.44 | 1.56 | 0.01 | <0.001 |
| Wet | −0.21 | 0.81 | 0.01 | <0.001 | ≥75 | 0.59 | 1.81 | 0.01 | <0.001 |
| Dry | 25–44 | ||||||||
| Weather | Driver Gender | ||||||||
| Fog | −0.18 | 0.84 | 0.03 | <0.001 | Mean Male | 0.18 | 1.20 | 0.01 | <0.001 |
| High winds | −0.51 | 0.60 | 0.08 | <0.001 | Sd.Male | 0.17 | 1.19 | 0.05 | <0.001 |
| Raining | 0.25 | 1.29 | 0.02 | <0.001 | Female | ||||
| Snowing | 0.27 | 1.31 | 0.07 | <0.001 | Number of observations | 874,847 | |||
| Clear | Log-likelihood null model | −816,487.90 | |||||||
| Log-likelihood full model | −357,890.20 | ||||||||
| R2McFadden | 0.56 | ||||||||
| Rule | Association Rules | S | C | L | LIC |
|---|---|---|---|---|---|
| ID | Antecedent | % | % | ||
| 1 | Driver Behaviour = DisobeyingPedCrossings | 4.07 | 100.00 | 8.66 | n.a. |
| 2 | Driver Age ≥ 75 | 1.10 | 18.52 | 1.60 | n.a. |
| 3 | Driver Age ≥ 75 & Lighting = Nt | 0.28 | 30.41 | 2.63 | 1.64 |
| 4 | Driver Age ≥ 75 & Lighting = Nt & Alignment = Tan | 0.18 | 39.27 | 3.40 | 1.29 |
| 5 | Driver Age ≥ 75 & Lighting = Nt & Road Type = Um | 0.23 | 38.03 | 3.29 | 1.25 |
| 6 | Driver Age ≥ 75 & Lighting = Nt & Area = U | 0.27 | 36.74 | 3.18 | 1.21 |
| 7 | Driver Age ≥ 75 & Lighting = Nt & Season = Win | 0.12 | 34.89 | 3.02 | 1.15 |
| 8 | Driver Age ≥ 75 & Weather = Ra | 0.14 | 26.82 | 2.32 | 1.45 |
| 9 | Driver Age ≥ 75 & Weather = Ra & Road Type = Um | 0.12 | 35.82 | 3.10 | 1.34 |
| 10 | Driver Age ≥ 75 & Weather = Ra & Area = U | 0.13 | 33.72 | 2.92 | 1.26 |
| 11 | Driver Age ≥ 75 & Alignment = Tan | 0.70 | 25.85 | 2.24 | 1.40 |
| 12 | Driver Age ≥ 75 & Alignment = Tan & Pavement = Wt | 0.12 | 33.69 | 2.92 | 1.30 |
| 13 | Driver Age ≥ 75 & Alignment = Tan & Road Type = Um | 0.60 | 33.20 | 2.87 | 1.28 |
| 14 | Driver Age ≥ 75 & Alignment = Tan & Area = U | 0.67 | 31.66 | 2.74 | 1.22 |
| 15 | Driver Age ≥ 75 & Alignment = Tan & Season = Win | 0.18 | 31.03 | 2.69 | 1.20 |
| 16 | Driver Age ≥ 75 & Alignment = Tan & Driver Behaviour = Normal | 0.15 | 29.62 | 2.57 | 1.15 |
| 17 | Driver Age ≥ 75 & Alignment = Tan & Season = Aut | 0.27 | 29.46 | 2.55 | 1.14 |
| 18 | Driver Age ≥ 75 & Road Type = Um | 0.96 | 23.87 | 2.07 | 1.29 |
| 19 | Driver Age ≥ 75 & Road Type = Um & Pavement = Wt | 0.16 | 32.24 | 2.79 | 1.35 |
| 20 | Driver Age ≥ 75 & Road Type = Um & Season = Win | 0.26 | 28.85 | 2.50 | 1.21 |
| 21 | Driver Age ≥ 75 & Road Type = Um & Season = Aut | 0.36 | 27.43 | 2.38 | 1.15 |
| 22 | Driver Age ≥ 75 & Road Type = Um & Driver Behaviour = Normal | 0.19 | 26.94 | 2.33 | 1.13 |
| 23 | Driver Age ≥ 75 & Road Type = Um & Vehicle Type = Car | 0.91 | 26.23 | 2.27 | 1.10 |
| 24 | Driver Age ≥ 75 & Pavement = Wt | 0.19 | 23.63 | 2.05 | 1.28 |
| 25 | Driver Age ≥ 75 & Pavement = Wt & Area = U | 0.18 | 30.20 | 2.61 | 1.28 |
| 26 | Driver Age ≥ 75 & Area = U | 1.06 | 22.55 | 1.95 | 1.22 |
| 27 | Driver Age ≥ 75 & Area = U & Season = Win | 0.28 | 27.23 | 2.36 | 1.21 |
| 28 | Driver Age ≥ 75 & Area = U & Season = Aut | 0.40 | 26.15 | 2.26 | 1.16 |
| 29 | Driver Age ≥ 75 & Area = U & Driver Behaviour = Normal | 0.22 | 26.03 | 2.25 | 1.15 |
| 30 | Driver Age ≥ 75 & Driver Behaviour = Normal & Vehicle Type = Car | 0.22 | 25.02 | 2.17 | 1.13 |
| 31 | Driver Age ≥ 75 & Season = Win | 0.29 | 22.55 | 1.95 | 1.22 |
| 32 | Driver Age ≥ 75 & Season = Win & Vehicle Age = 0–10 | 0.12 | 24.85 | 2.15 | 1.10 |
| 33 | Driver Age ≥ 75 & Driver Behaviour = Normal | 0.23 | 22.05 | 1.91 | 1.19 |
| 34 | Driver Age ≥ 75 & Season = Aut | 0.42 | 21.61 | 1.87 | 1.17 |
| 35 | Driver Age ≥ 75 & Season = Aut & Vehicle Age = 0–10 | 0.17 | 23.67 | 2.05 | 1.10 |
| 36 | Driver Age ≥ 75 & Vehicle Age = 0–10 | 0.46 | 20.38 | 1.76 | 1.10 |
| 37 | Driver Behaviour = Manoeuvre | 1.25 | 18.51 | 1.60 | n.a. |
| 38 | Driver Behaviour = Manoeuvre & Alignment = SgInt | 0.10 | 81.78 | 7.08 | 4.42 |
| 39 | Driver Behaviour = Manoeuvre & Alignment = UnSgInt | 0.26 | 81.37 | 7.05 | 4.40 |
| 40 | Driver Behaviour = Manoeuvre & Alignment = UnSgInt & Vehicle Type = Car | 0.22 | 99.38 | 8.61 | 1.22 |
| 41 | Driver Behaviour = Manoeuvre & Vehicle Type = Tr | 0.16 | 24.13 | 2.09 | 1.30 |
| 42 | Driver Behaviour = Manoeuvre & Vehicle Type = Tr & Road Type = Um | 0.14 | 30.01 | 2.60 | 1.24 |
| 43 | Driver Behaviour = Manoeuvre & Vehicle Type = Tr & Area = U | 0.14 | 28.19 | 2.44 | 1.17 |
| 44 | Driver Behaviour = Manoeuvre & Season = Win | 0.31 | 23.46 | 2.03 | 1.27 |
| 45 | Driver Behaviour = Manoeuvre & Season = Win & Road Type = Um | 0.28 | 28.40 | 2.46 | 1.21 |
| 46 | Driver Behaviour = Manoeuvre & Season = Win & Area = U | 0.29 | 26.58 | 2.30 | 1.13 |
| 47 | Driver Behaviour = Manoeuvre & Road Type = Um | 1.11 | 23.16 | 2.01 | 1.25 |
| 48 | Driver Behaviour = Manoeuvre & Area = U | 1.17 | 21.14 | 1.83 | 1.14 |
| Rule | Association Rules | S | C | L | LIC |
|---|---|---|---|---|---|
| ID | Antecedent | % | % | ||
| 49 | Driver Age ≥ 75 & Lighting = Nt & Alignment = Tan & Road Type = Um | 0.15 | 49.25 | 4.26 | 1.25 |
| 50 | Driver Age ≥ 75 & Lighting = Nt & Alignment = Tan & Area = U | 0.17 | 48.06 | 4.16 | 1.22 |
| 51 | Driver Age ≥ 75 & Lighting = Nt & Season = Win & Area = U | 0.11 | 41.05 | 3.55 | 1.18 |
| 52 | Driver Age ≥ 75 & Alignment = Tan & Road Type = Um & Pavement = Wt | 0.10 | 44.22 | 3.83 | 1.33 |
| 53 | Driver Age ≥ 75 & Alignment = Tan & Road Type = Um & Vehicle Type = Car | 0.57 | 36.81 | 3.19 | 1.11 |
| 54 | Driver Age ≥ 75 & Alignment = Tan & Area = U & Pavement = Wt | 0.12 | 41.98 | 3.64 | 1.33 |
| 55 | Driver Age ≥ 75 & Alignment = Tan & Area = U & Vehicle Type = Car | 0.64 | 34.96 | 3.03 | 1.10 |
| 56 | Driver Age ≥ 75 & Alignment = Tan & Area = U & Driver Behaviour = Normal | 0.14 | 34.86 | 3.02 | 1.10 |
| 57 | Driver Age ≥ 75 & Alignment = Tan & Season = Win & Road Type = Um | 0.16 | 39.21 | 3.40 | 1.26 |
| 58 | Driver Age ≥ 75 & Alignment = Tan & Season = Win & Area = U | 0.18 | 37.44 | 3.24 | 1.21 |
| 59 | Driver Age ≥ 75 & Alignment = Tan & Driver Behaviour = Normal & Vehicle Type = Car | 0.14 | 33.29 | 2.88 | 1.12 |
| 60 | Driver Age ≥ 75 & Alignment = Tan & Season = Aut & Road Type = Um | 0.23 | 37.44 | 3.24 | 1.27 |
| 61 | Driver Age ≥ 75 & Alignment = Tan & Season = Aut & Area = U | 0.25 | 35.80 | 3.10 | 1.22 |
| 62 | Driver Age ≥ 75 & Road Type = Um & Driver Behaviour = Normal & Vehicle Type = Car | 0.18 | 31.19 | 2.70 | 1.16 |
| 63 | Driver Age ≥ 75 & Area = U & Driver Behaviour = Normal & Vehicle Type = Car | 0.21 | 29.93 | 2.59 | 1.15 |
| Rule | Association Rules | S | C | L | LIC |
|---|---|---|---|---|---|
| ID | Antecedent | % | % | ||
| T_1 | Driver Behaviour = Disobeying pedestrian crossing facility | 4.07 | 100.00 | 8.66 | n.a. |
| T_14 | Driver Behaviour = Manoeuvring/Speeding/Normal/Illegal travel direction & Road Type = Urban municipal/Urban national/Urban provincial & Alignment = Tangent | 4.52 | 19.65 | 1.70 | 1.49 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rella Riccardi, M.; Galante, F.; Scarano, A.; Montella, A. Econometric and Machine Learning Methods to Identify Pedestrian Crash Patterns. Sustainability 2022, 14, 15471. https://doi.org/10.3390/su142215471
Rella Riccardi M, Galante F, Scarano A, Montella A. Econometric and Machine Learning Methods to Identify Pedestrian Crash Patterns. Sustainability. 2022; 14(22):15471. https://doi.org/10.3390/su142215471
Chicago/Turabian StyleRella Riccardi, Maria, Francesco Galante, Antonella Scarano, and Alfonso Montella. 2022. "Econometric and Machine Learning Methods to Identify Pedestrian Crash Patterns" Sustainability 14, no. 22: 15471. https://doi.org/10.3390/su142215471
APA StyleRella Riccardi, M., Galante, F., Scarano, A., & Montella, A. (2022). Econometric and Machine Learning Methods to Identify Pedestrian Crash Patterns. Sustainability, 14(22), 15471. https://doi.org/10.3390/su142215471