Method of Real-Time Wellbore Surface Reconstruction Based on Spiral Contour

Abstract
1. Introduction
2. Basic Data and Existing Techniques for Wellbore Surface Reconstruction
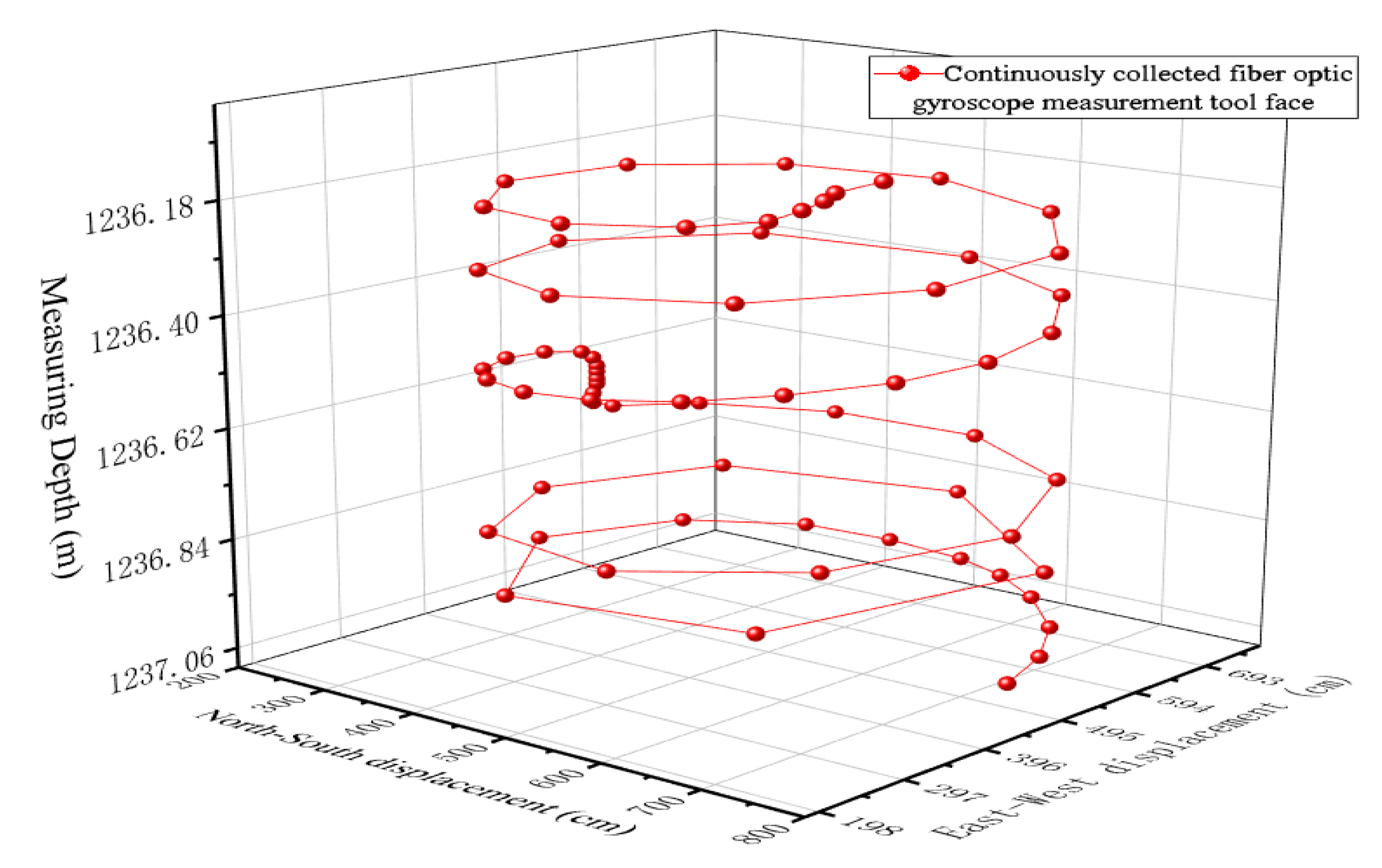
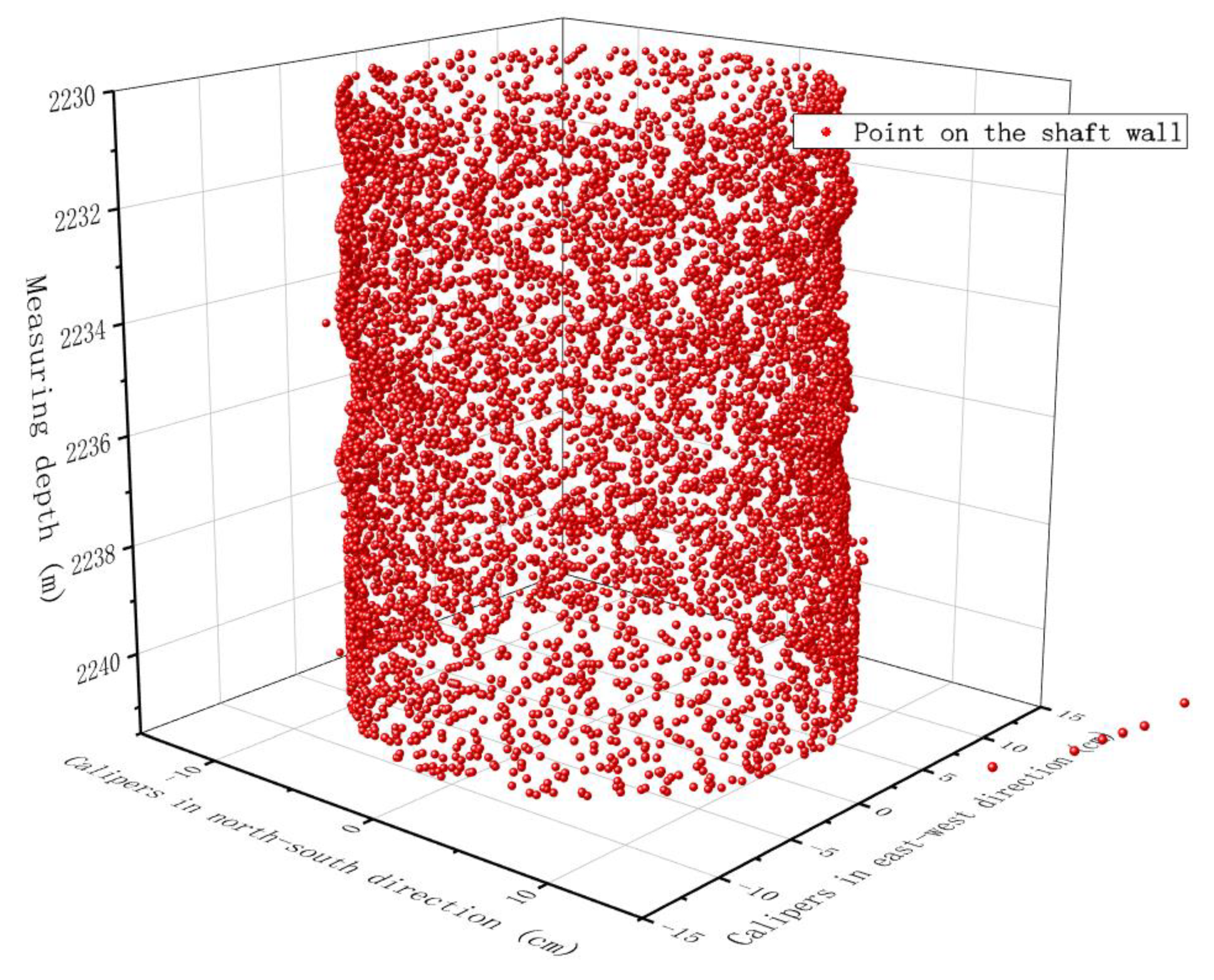
2.1. Basic Data
2.2. Problems in Current Surface Reconstruction Technologies
3. Principle of Wellbore Surface Reconstruction Using Spiral Contour Methodology
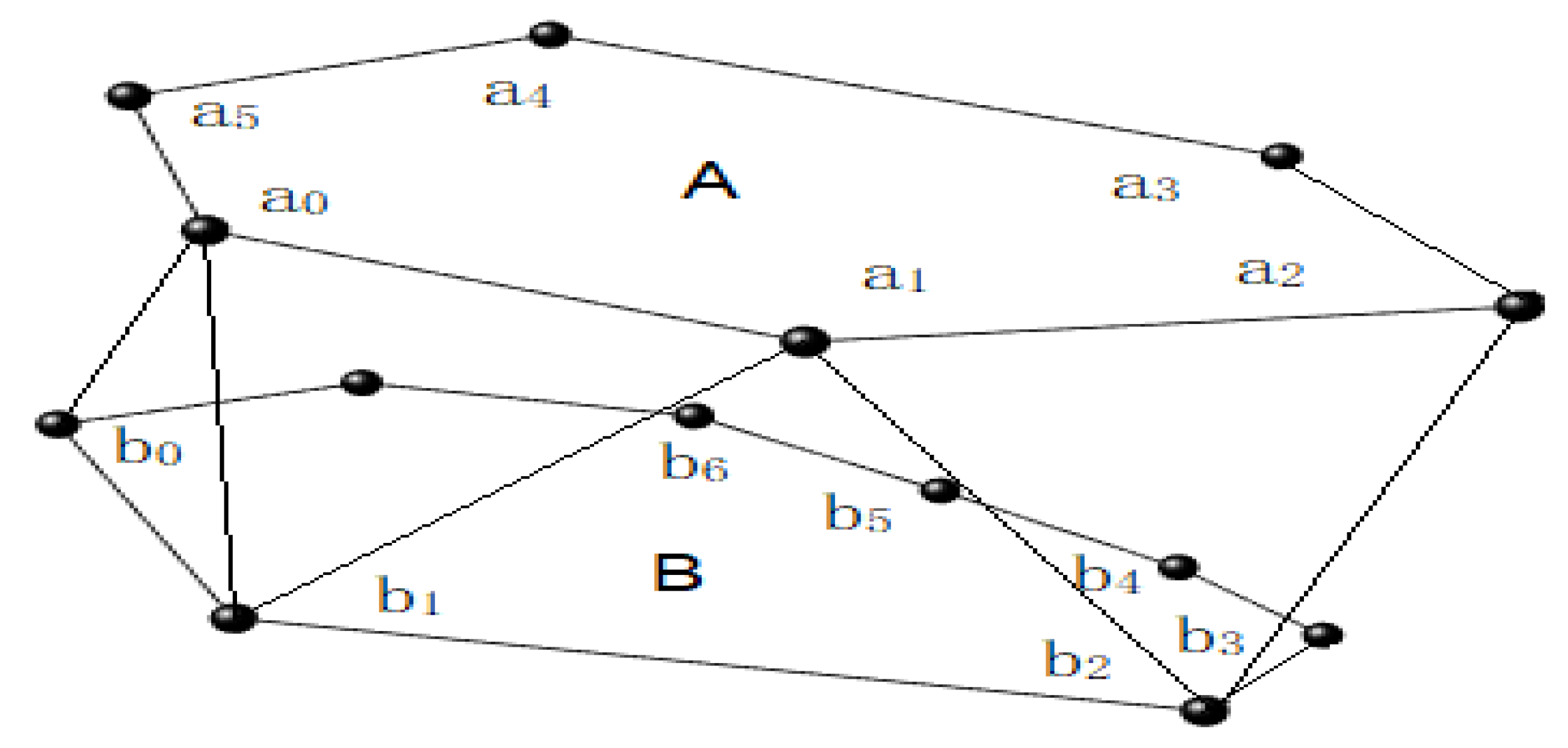
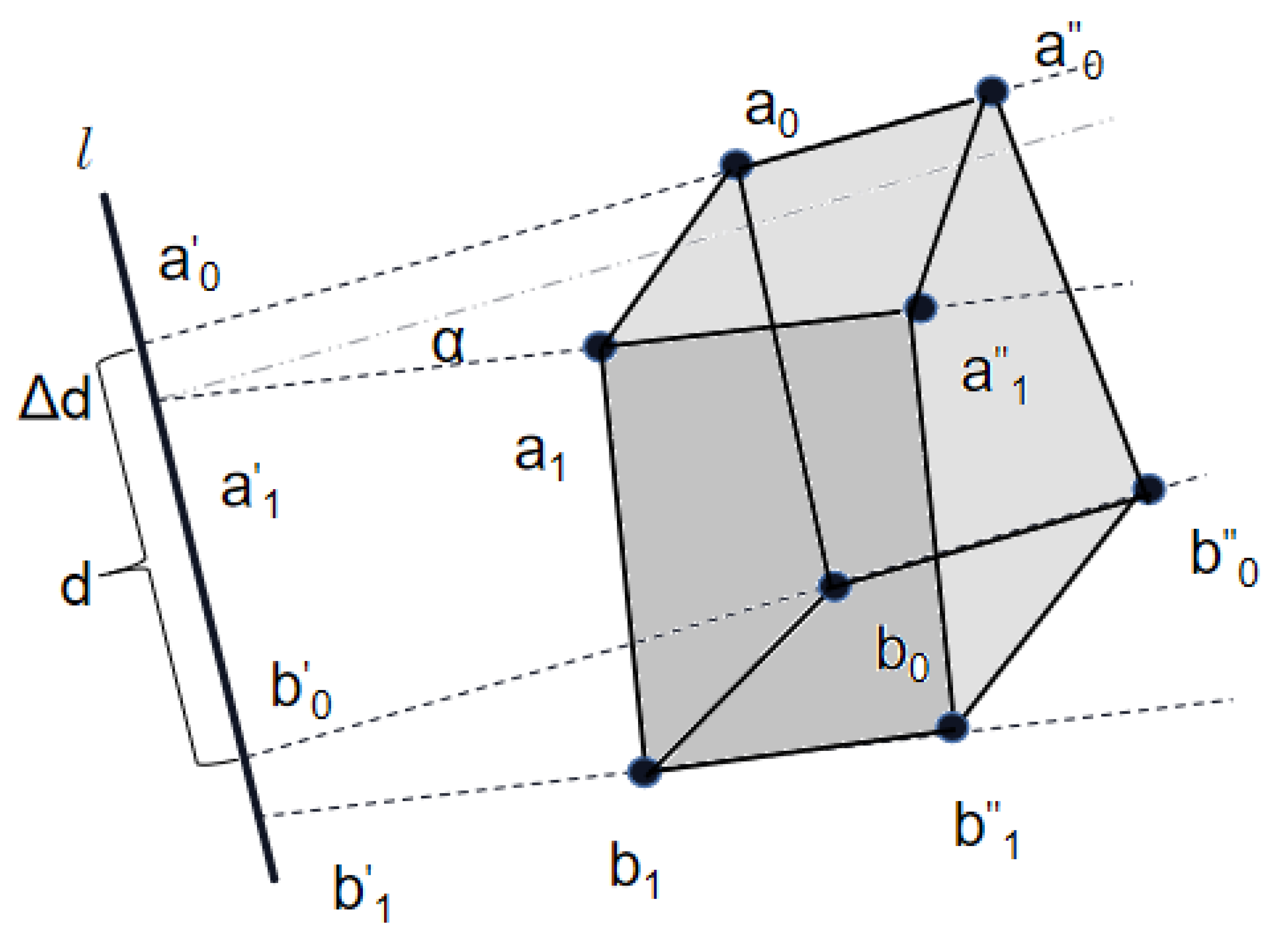
3.1. Basic Structure of Surface of Wellbore with Spiral Profile
- Rule 1
- Rule 2
- Rule 3
- Rule 4
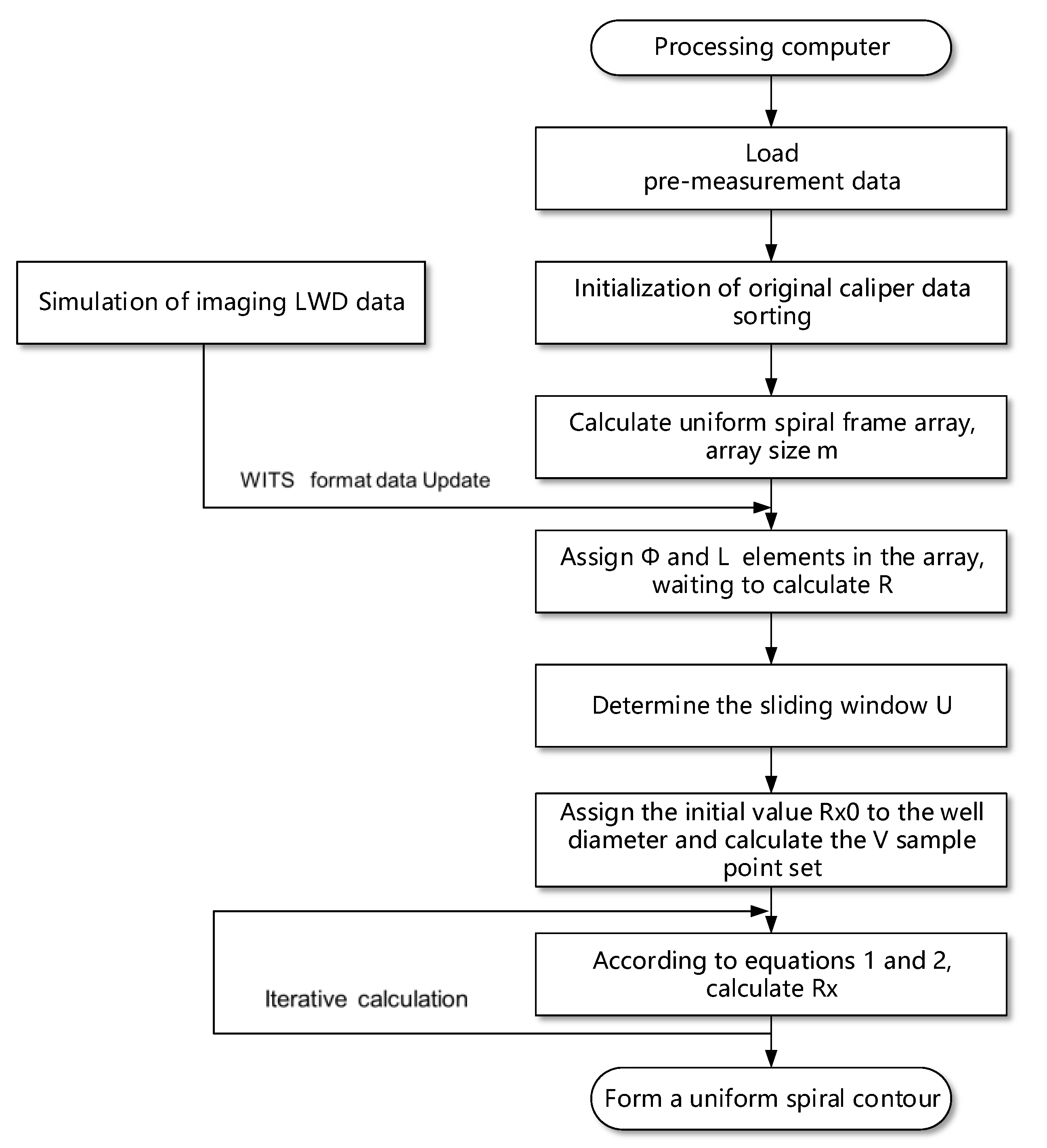
3.2. Modeling Steps for Wellbore Surface Structure Reconstruction Using Spiral Profile
3.2.1. Data Organization
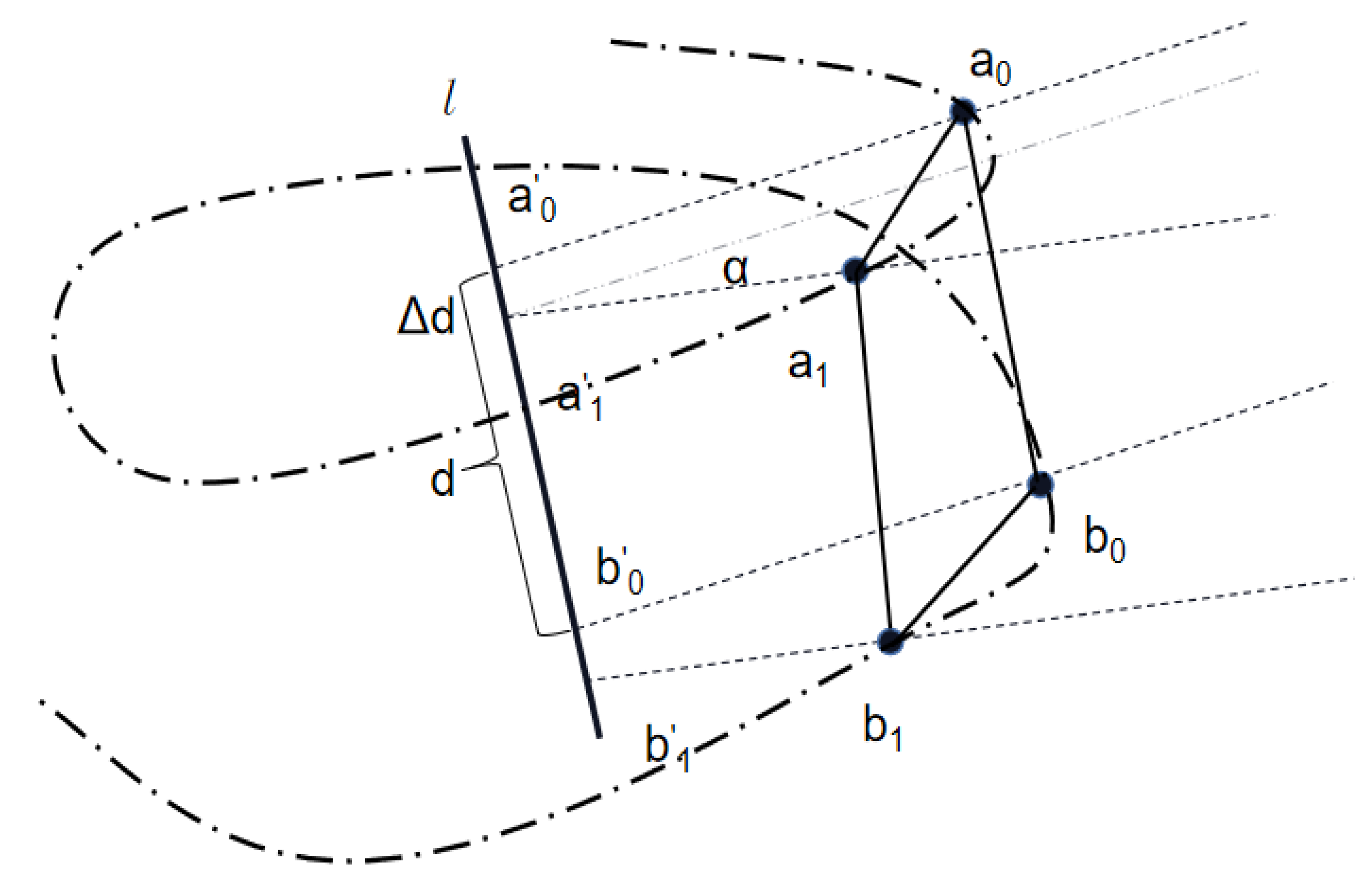
3.2.2. Angle and Pitch Homogenization
3.3. Iterative Cylindrical Space Surface Inverse Distance Interpolation Algorithm
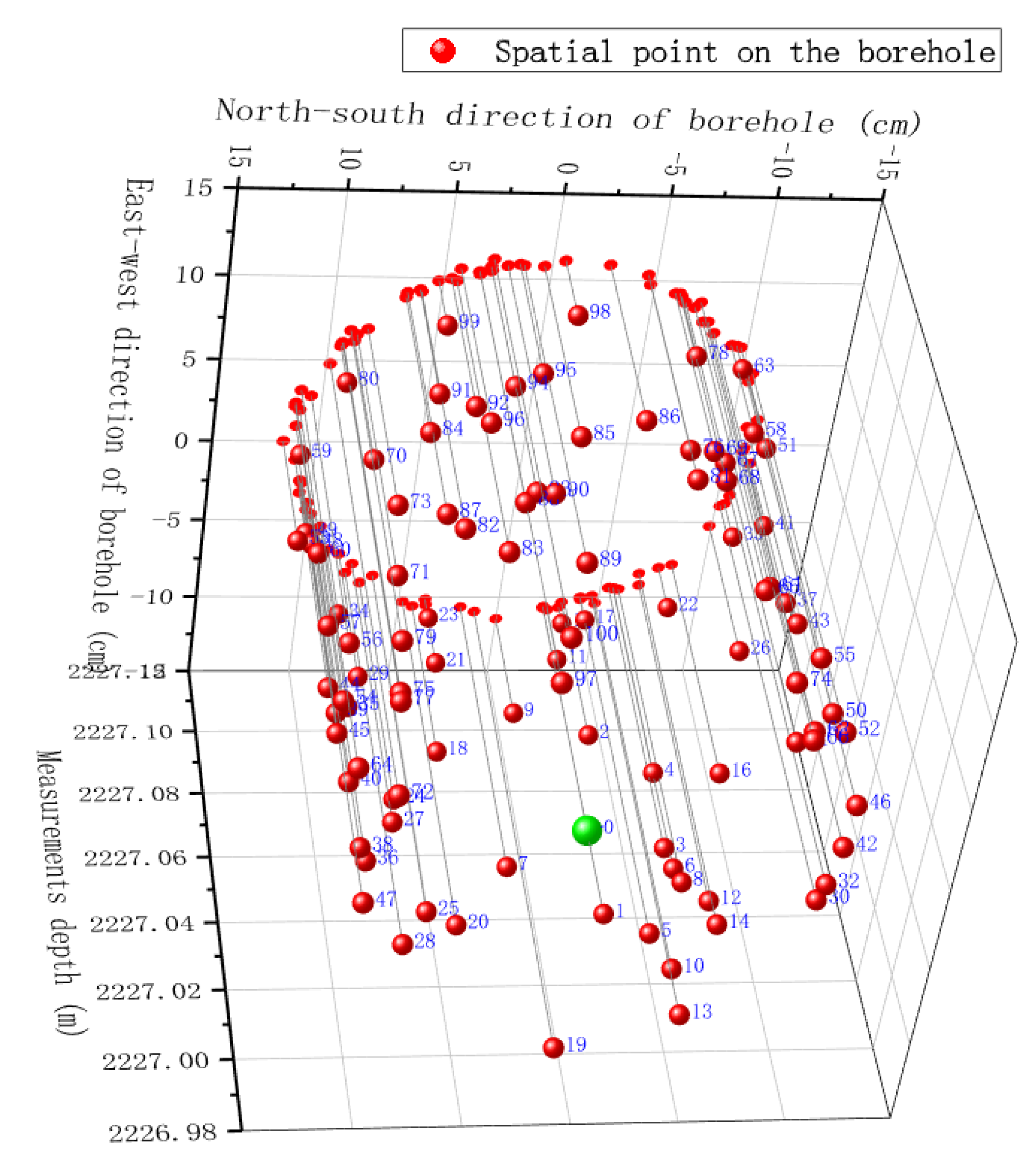
3.3.1. Data Preprocessing and Acquisition of Sliding Window
3.3.2. Sort Point Set in the Sliding Window to Obtain the Final Calculation Sample
3.3.3. Iterative Calculation of Caliper of Insertion Point
3.4. Adjustment Method of Surface of Wellbore after Data Update
3.4.1. Data Update
3.4.2. Point Interference Reconstruction
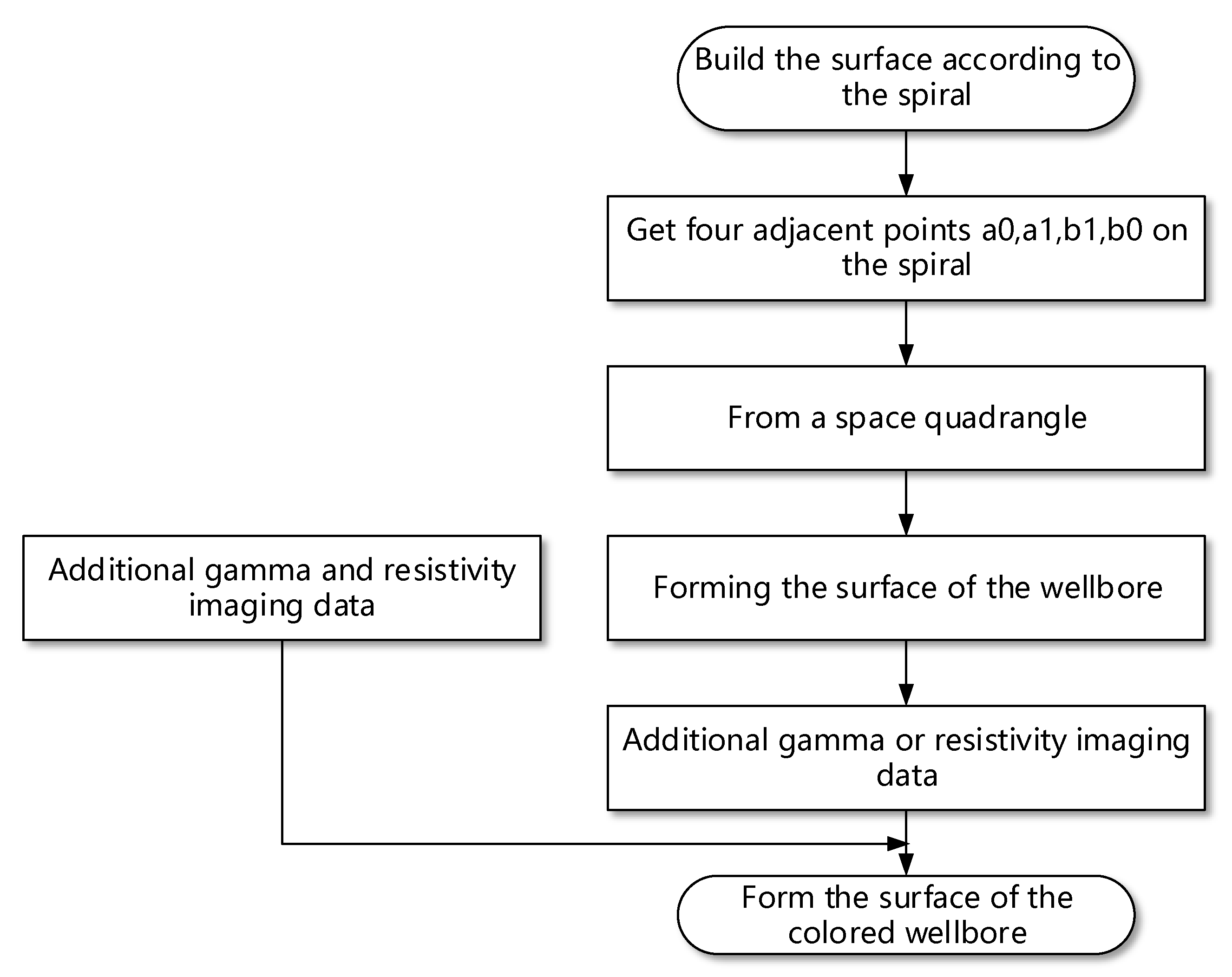
3.5. Extension from Surface to Volume
3.6. Method for Wellbore Attribute Assignment
4. Experiment and Applications
4.1. Experimental Conditions and Experimental Procedures
4.2. Comparison of Spatial Interpolation Results
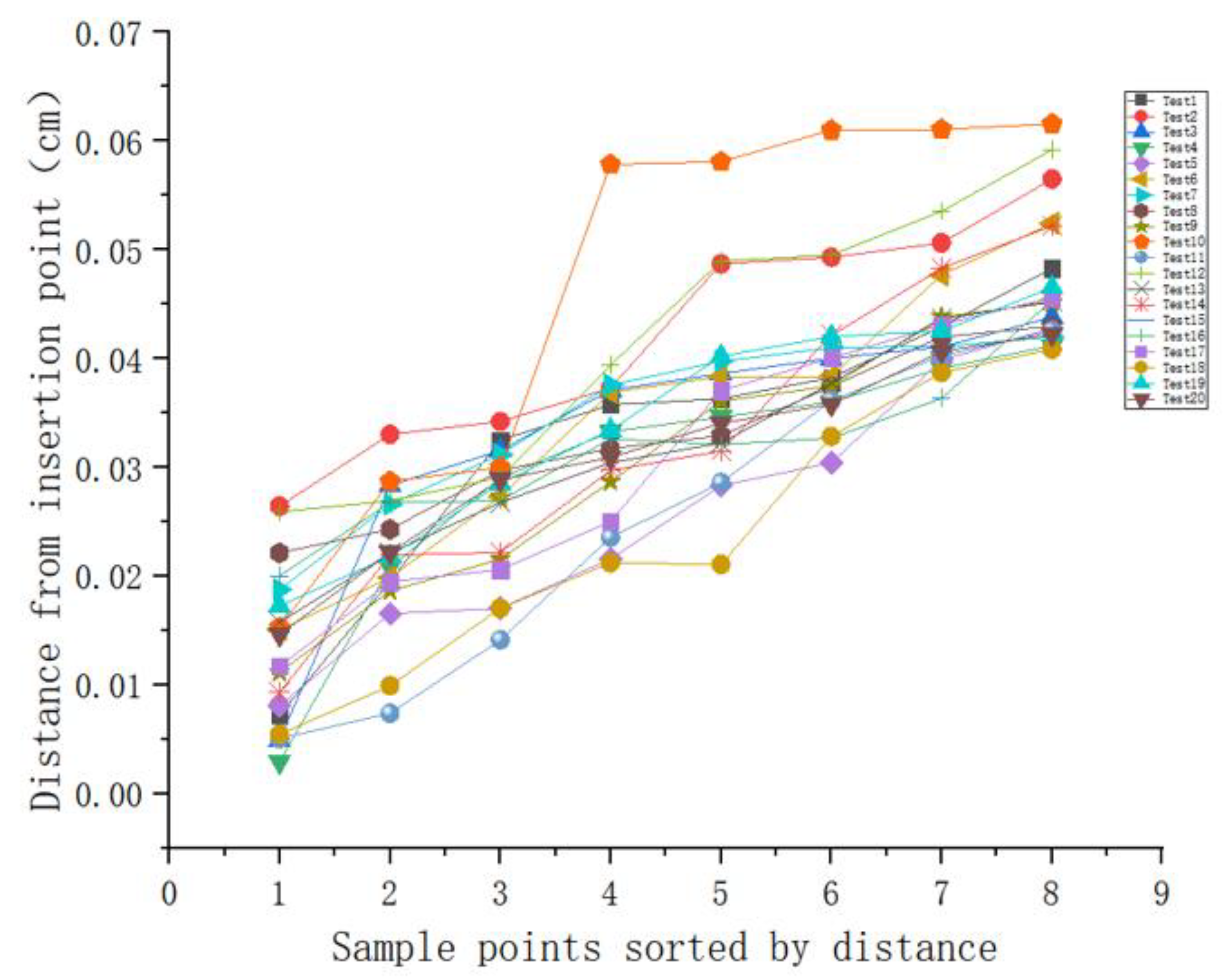
4.2.1. Analysis of Relationship between Sample Size and Interpolation Distance to Be Interpolated
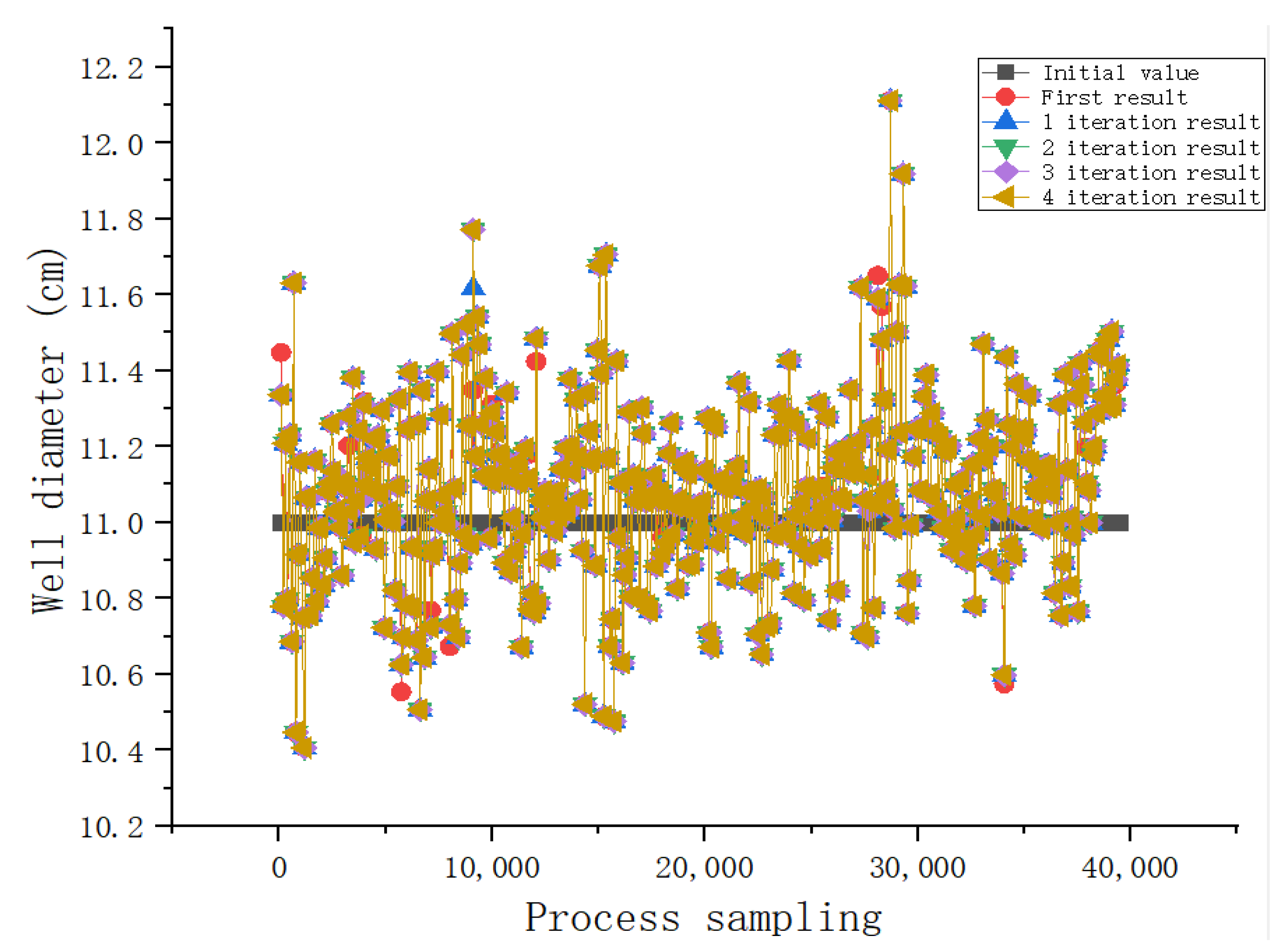
4.2.2. Comparison of Interpolation Iterations
4.2.3. Analysis of the Model Fit between Data and Wellbore after Interpolation
4.3. Inner Surface of Wellbore and Attribute Assignment
4.4. Applications
5. Conclusions and Discussion
- (1)
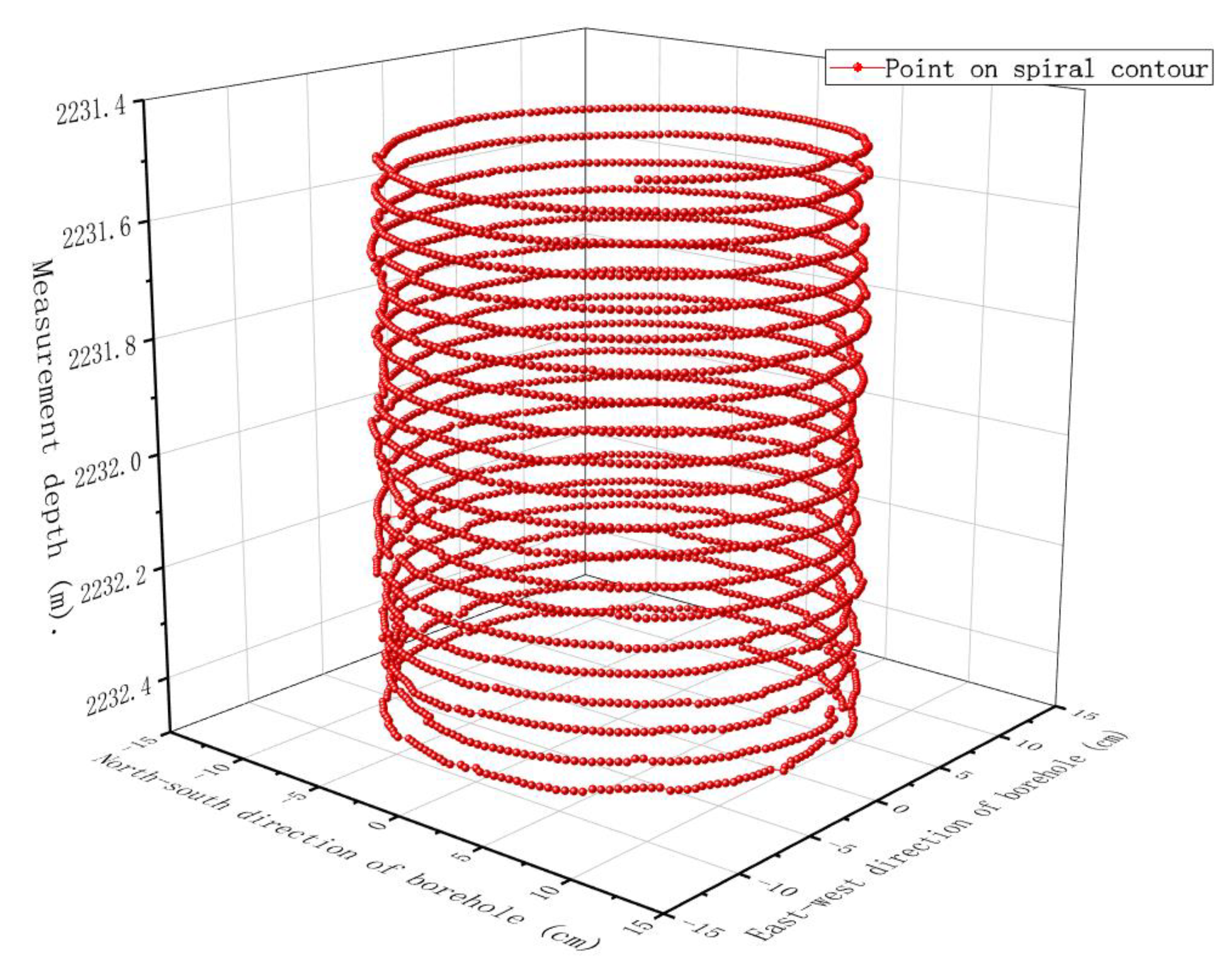
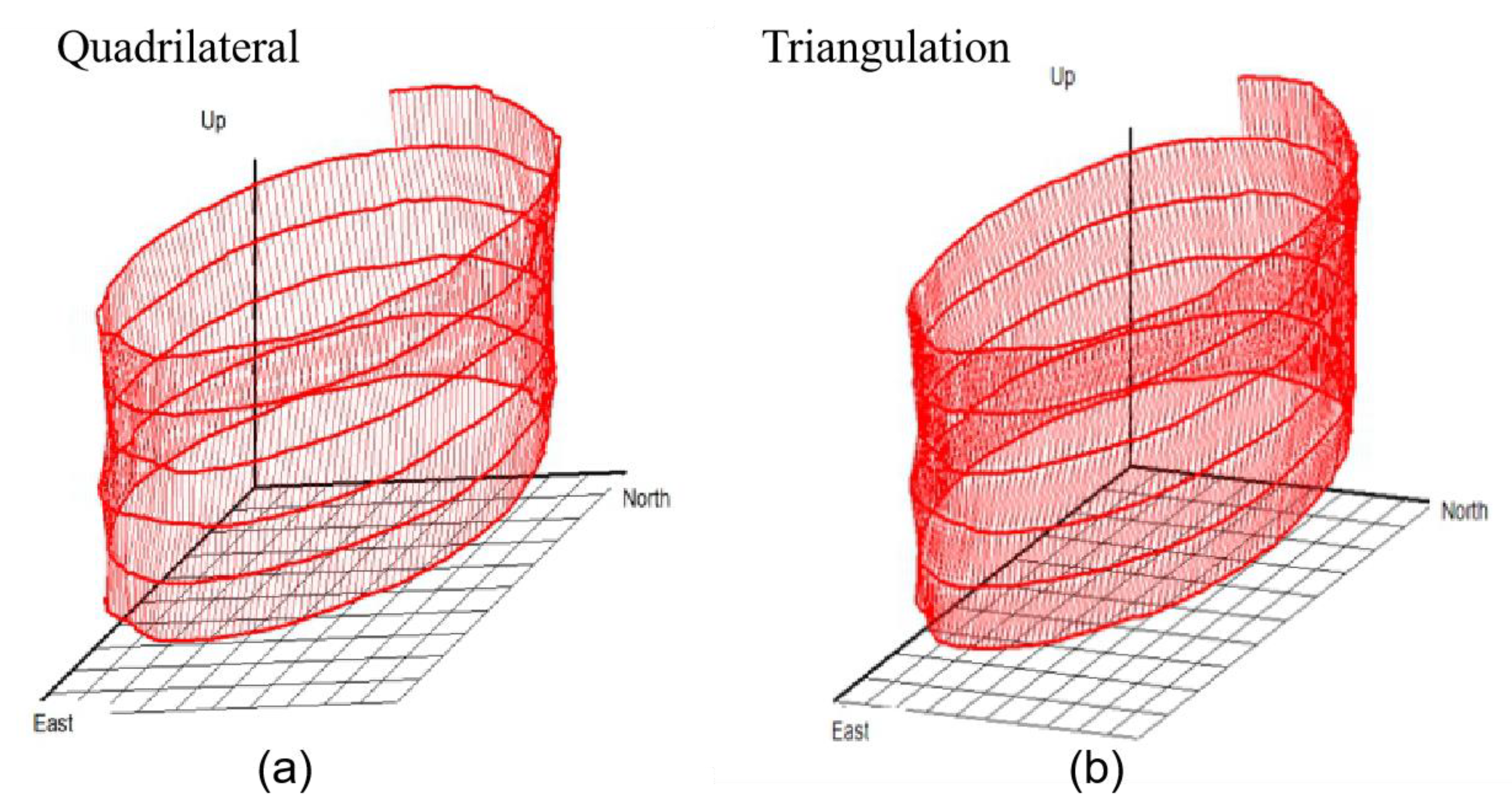
- The method proposed in this paper reconstructs the solid wellbore surface into a spiral curve with continuous and uniform spacing. The four adjacent points of the upper and lower pitch form a quadrilateral to form the wellbore surface, which could be extended to describe the wellbore surface with a certain thickness.
- (2)
- The improved inverse distance weighted interpolation method takes into account the influence of the wellbore shape on the caliper interpolation. A sliding window was used to reduce computation volume. The wellbore surface was reconstructed with high similarity to the actual measurement data. The measured data could be updated in real time, data could be stored, and the calculation efficiency was high.
- (3)
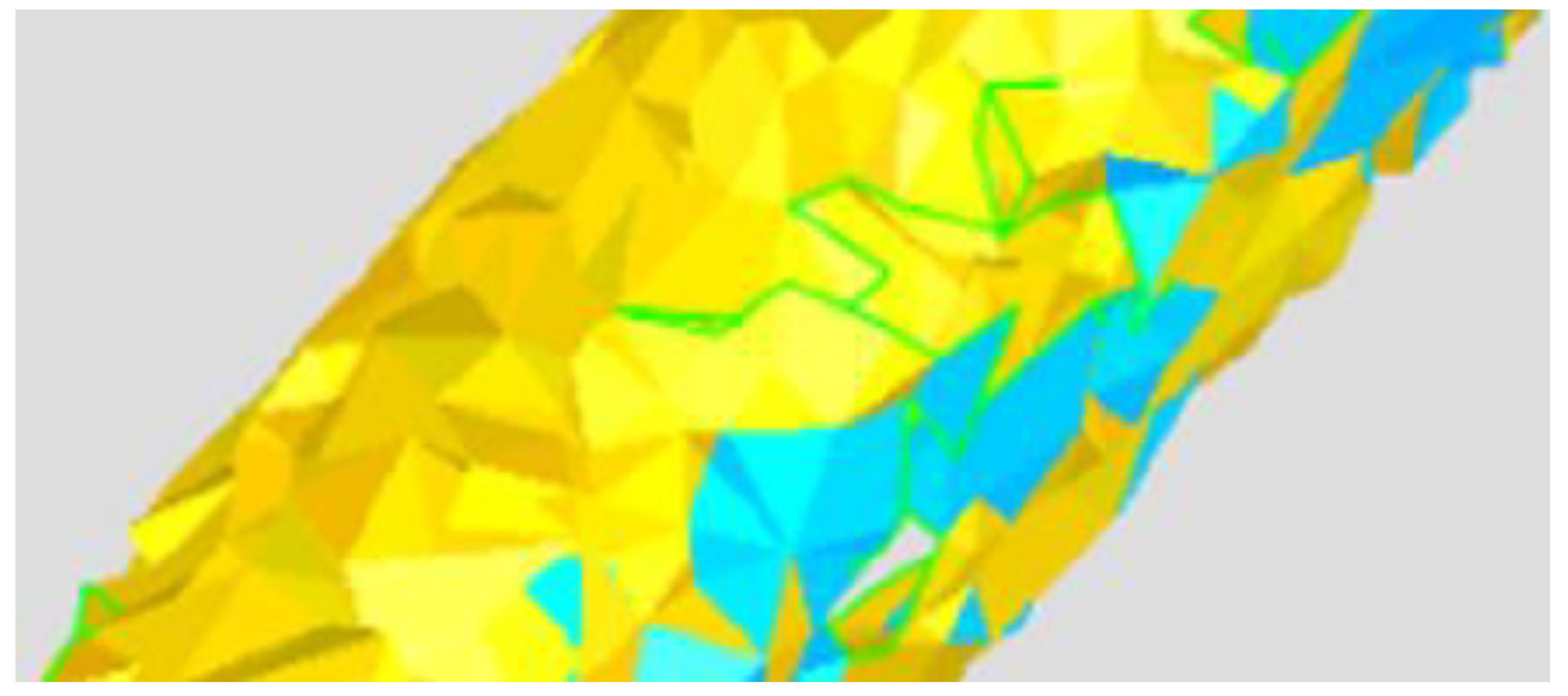
- The spatial quadrilaterals were further constructed to form triangular facets. The existing file architecture and display software could be used to visualize and store the data points.
- (4)
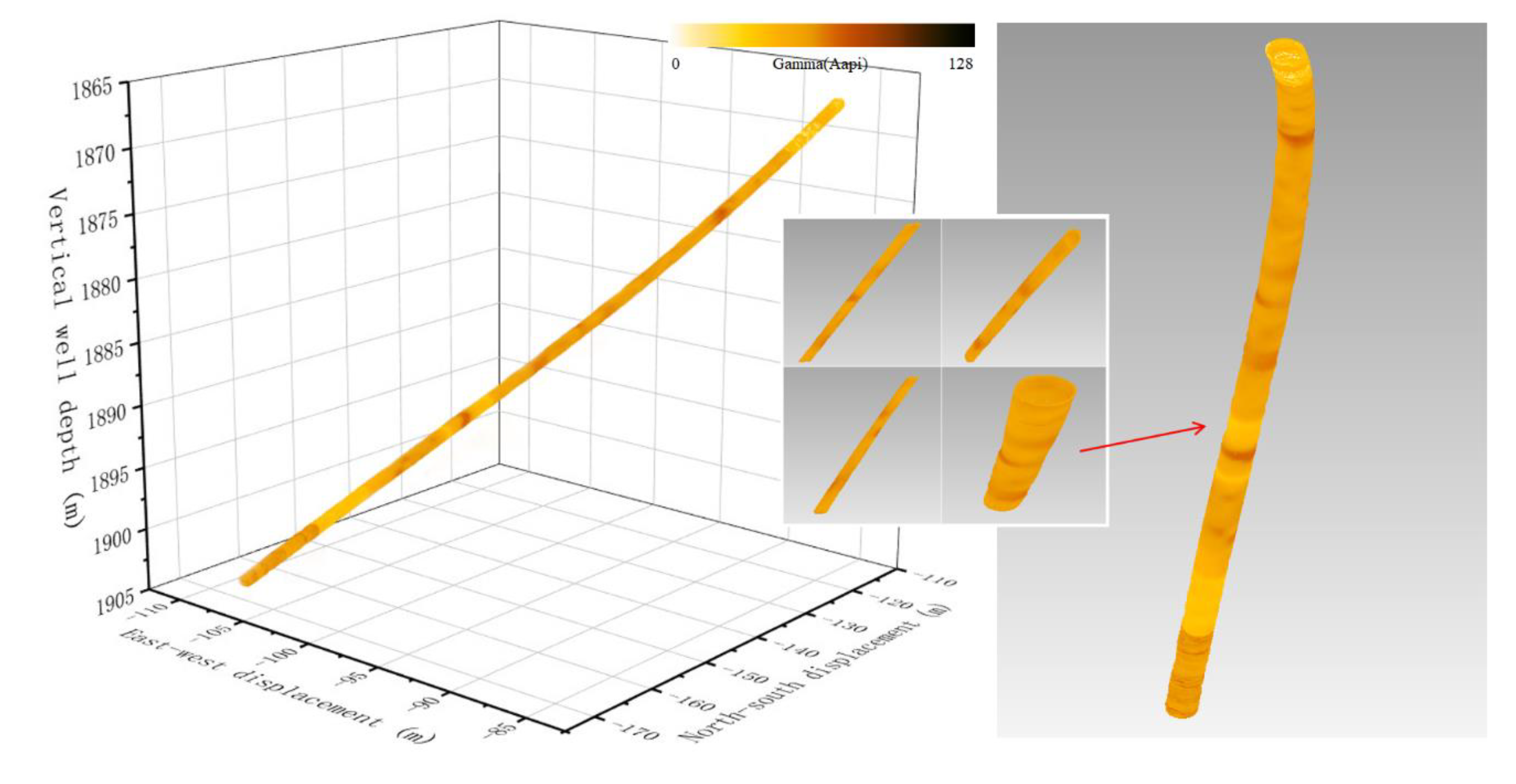
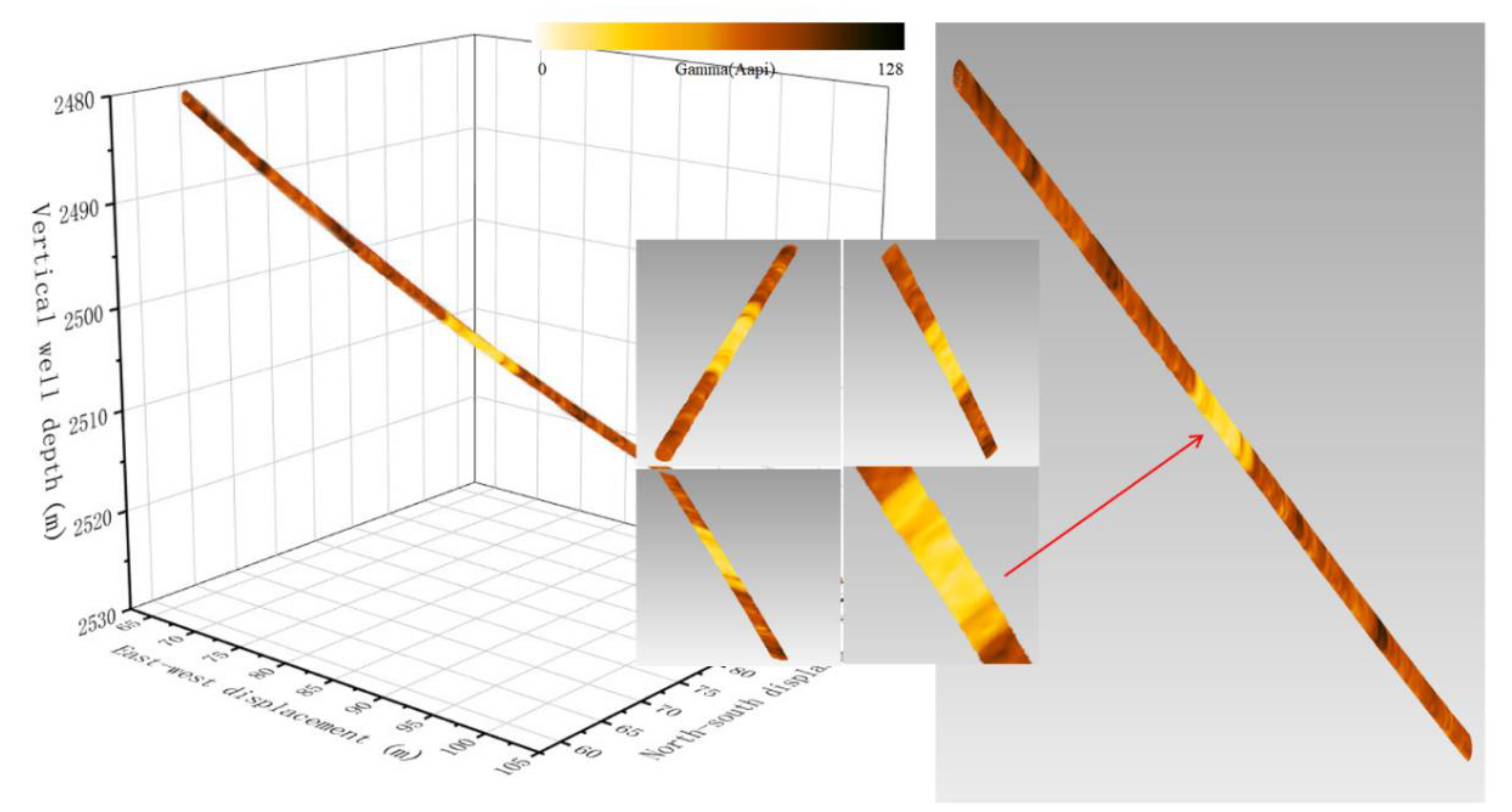
- The constructed space quadrilateral and partial hexahedron corresponded to the sector data measured by imaging while drilling, which is convenient for adding geological properties.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Prammer, M.; Morys, M.; Kizhnik, S. Field testing of an advanced LWD imaging resistivity tool. In Proceedings of the SPWLA 48th Annual Logging Symposium, Society of Petrophysicists and Well-Log Analysts, London, UK, 3–6 June 2007. [Google Scholar]
- Finlay, S.; Omeragic, D.; Thiel, M.; Farnoosh, N.; Denichou, J.; Viandante, M. First Use of Ultra-Deep Resistivity 2D Deep Azimuthal Images to Identify Reservoir Sweep in a Mature Waterflood of Al-Shaheen Field. In Proceedings of the IOR 2019–20th European Symposium on Improved Oil Recovery, Pau, France, 8–10 April 2019; Volume 2019. [Google Scholar]
- Pickering, J.G.; Sengupta, S. Achieving Digital Oilfield Competency. In Proceedings of the SPE Middle East Intelligent Energy Conference and Exhibition, Manama, Bahrain, 28–30 October 2013. [Google Scholar]
- Rommetveit, R.; Bjorkevoll, K.S.; Halsey, G.W.; Fjar, E.; Odegaard, S.I.; Herbert, M.C.; Sandve, O.; Larsen, B. e-Drilling: A System for Real-Time Drilling Simulation, 3D Visualization and Control. In Proceedings of the SPE Gulf Coast Section 2008 Digital Energy Conference and Exhibition, Houston, TX, USA, 11–12 April 2007. [Google Scholar]
- Rommetveit, R.; Bjorkevoll, K.S.; Odegaard, S.I.; Herbert, M.C.; Halsey, G.W. Automatic Real-Time Drilling Supervision, Simulation, 3D Visualization, and Diagnosis on Ekofisk. In Proceedings of the IADC/SPE Drilling Conference, Orlando, FL, USA, 4–6 March 2008. [Google Scholar]
- Han, R.; Ashok, P.; Pryor, M.; Van Oort, E. Real-Time 3D Computer Vision Shape Analysis of Cuttings and Cavings; Society of Petroleum Engineers (SPE): Houston, TX, USA, 2018. [Google Scholar]
- Keppel, E. Approximating Complex Surfaces by Triangulation of Contour Lines. IBM J. Res. Dev. 1975, 19, 2–11. [Google Scholar] [CrossRef]
- Mackay, D. Robust Contour Based Surface Reconstruction Algorithms for Applications in Medical Imaging. Master’s Thesis, University of Canterbury, Christchurch, New Zealand, 2019. [Google Scholar]
- Villard, B.; Grau, V.; Zacur, E. Surface Mesh Reconstruction from Cardiac MRI Contours. J. Imaging 2018, 4, 16. [Google Scholar] [CrossRef]
- Holloway, M.; Grimm, C.; Ju, T. Template-based surface reconstruction from cross-sections. Comput. Graph. 2016, 58, 84–91. [Google Scholar] [CrossRef]
- Liu, L.; Bajaj, C.; Deasy, J.O.; Low, D.A.; Ju, T. Surface reconstruction from non-parallel curve networks. Comput. Graph. Forum 2008, 27, 155–163. [Google Scholar] [CrossRef] [PubMed]
- Bermano, A.; Vaxman, A.; Gotsman, C. Online reconstruction of 3D objects from arbitrary cross-sections. ACM Trans. Graph. 2011, 30, 1–11. [Google Scholar] [CrossRef]
- Lhuillier, M. Surface reconstruction from a sparse point cloud by enforcing visibility consistency and topology con-straints. Comput. Vis. Image Underst. 2018, 175, 52–71. [Google Scholar] [CrossRef]
- Beaufort, P.A.; Geuzaine, C.; Remacle, J.F. Automatic surface mesh generation for discrete models—A complete and automatic pipeline based on reparametrization. J. Comput. Phys. 2020, 417, 109575. [Google Scholar] [CrossRef]
- Berger, M.; Tagliasacchi, A.; Seversky, L.M.; Alliez, P.; Guennebaud, G.; Levine, J.A.; Sharf, A.; Silva, C.T. A survey of surface reconstruction from point clouds. Graph. Forum 2017, 36, 301–329. [Google Scholar]
- Asthana, V.; Bhatt, A.D. G1 continuous bifurcating and multi-bifurcating surface generation with B-splines. Comput. Des. Appl. 2016, 14, 95–106. [Google Scholar] [CrossRef][Green Version]
- Ginnis, A.I.; Kostas, K.V.; Kaklis, P.D. Construction of smooth branching surfaces using T-splines. Comput. Aided Des. 2017, 92, 22–32. [Google Scholar] [CrossRef][Green Version]
- Ikechukwu, M.N.; Ebinne, E.; Idorenyin, U.; Raphael, N.I. Accuracy Assessment and Comparative Analysis of IDW, Spline and Kriging in Spatial Interpolation of Landform (Topography): An Experimental Study. J. Geogr. Inf. Syst. 2017, 9, 354–371. [Google Scholar] [CrossRef]
- Calcagno, P.; Chilès, J.P.; Courrioux, G.; Guillen, A. Geological modelling from field data and geological knowledge: Part I. Modelling method cou-pling 3D potential-field interpolation and geological rules. Phys. Earth Planet. Inter. 2008, 171, 147–157. [Google Scholar] [CrossRef]
- Mužík, J.; Vondrackova, T.; Sitányiová, D.; Plachy, J.; Nývlt, V. Creation of 3D Geological Models Using Interpolation Methods for Numerical Modelling. Procedia Earth Planet. Sci. 2015, 15, 25–30. [Google Scholar] [CrossRef][Green Version]
- Dhamodaran, S.; Lakshmi, M. Comparative analysis of spatial interpolation with climatic changes using inverse dis-tance method. J. Ambient Intell. Humaniz. Comput. 2020, 1–10. [Google Scholar] [CrossRef]
- Cevik, N. A dynamic inverse distance weighting-based local face descriptor. Multimed. Tools Appl. 2020, 1–16. [Google Scholar] [CrossRef]
- Dag, A.; Ozdemir, A.C. A Comparative Study for 3D Surface Modeling of Coal Deposit by Spatial Interpolation Approaches. Resour. Geol. 2013, 63, 394–403. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhu, H. Collaborative 3D geological modeling analysis based on multi-source data standard. Eng. Geol. 2018, 246, 233–244. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 | Test 6 | Test 7 | Test 8 | Test 9 | Test 10 | Units |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Distance | 0.00051 | 0.00027 | 0.0002 | 0.00055 | 0.00082 | 0.00023 | 0.00035 | 0.00074 | 0.00063 | 0.0008 | cm |
| Results compared | 0.01675 | −0.00044 | −0.01712 | 0.01492 | −0.00412 | −0.00512 | −0.0072 | 0.03517 | 0.0014 | −0.02493 | |
| Similarity | 99.844% | 99.996% | 99.847% | 99.860% | 99.963% | 99.954% | 99.936% | 99.670% | 99.987% | 99.779% | |
| Rx | 10.7443 | 11.15809 | 11.19082 | 10.66311 | 11.24298 | 11.12832 | 11.32067 | 10.70871 | 11.16582 | 11.23907 | cm |
| V1 | 10.72755 | 11.15853 | 11.20794 | 10.64819 | 11.2471 | 11.13344 | 11.32787 | 10.67354 | 11.16442 | 11.264 | cm |
| V2 | 11.1401 | 11.15738 | 11.00723 | 11.01389 | 11.1991 | 10.86771 | 10.89587 | 11.20768 | 11.16442 | 10.82163 | cm |
| V3 | 10.78989 | 11.12794 | 10.72794 | 11.18067 | 11.26451 | 10.7936 | 11.13779 | 11.32237 | 11.26374 | 10.82906 | cm |
| V4 | 10.69914 | 10.83264 | 10.6153 | 11.19654 | 11.08288 | 11.1799 | 10.76557 | 11.33606 | 11.15456 | 11.22125 | cm |
| V5 | 11.03296 | 10.71462 | 10.71206 | 10.83418 | 10.66099 | 10.66099 | 10.70054 | 10.83046 | 10.65037 | 11.1223 | cm |
| V6 | 10.79846 | 10.73971 | 10.72026 | 10.784 | 11.1511 | 10.96998 | 11.18285 | 11.04934 | 10.73267 | 10.77517 | cm |
| V7 | 10.83674 | 10.65779 | 10.66176 | 11.18208 | 11.09683 | 11.1511 | 11.18093 | 11.33606 | 11.05856 | 11.1223 | cm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Wang, R. Method of Real-Time Wellbore Surface Reconstruction Based on Spiral Contour. Energies 2021, 14, 291. https://doi.org/10.3390/en14020291
Li H, Wang R. Method of Real-Time Wellbore Surface Reconstruction Based on Spiral Contour. Energies. 2021; 14(2):291. https://doi.org/10.3390/en14020291
Chicago/Turabian StyleLi, Hongqiang, and Ruihe Wang. 2021. "Method of Real-Time Wellbore Surface Reconstruction Based on Spiral Contour" Energies 14, no. 2: 291. https://doi.org/10.3390/en14020291
APA StyleLi, H., & Wang, R. (2021). Method of Real-Time Wellbore Surface Reconstruction Based on Spiral Contour. Energies, 14(2), 291. https://doi.org/10.3390/en14020291