1. Introduction
Unoccupied Aerial Vehicles (UAV), also known as small Unmanned Aerial Systems (sUASs), Unmanned Aerial Systems (UAS) or drones, are being embraced as an important tool to enable Public Participation Geographic Information Systems (PPGIS), a body of scholarship emphasizing open data practices and collaborative methods that include scientists and non-scientists in action-oriented research [
1,
2,
3]. Here, we present an example from coastal research and monitoring where multidisciplinary researchers work together through an introductory drone mapping training program to understand the dynamics and drivers of coastal ecosystems, specifically seagrass habitats, and develop a broader training framework for PPGIS that aims to eventually expand participatory engagement in seagrass research and monitoring.
Seagrasses are flowering plants that have evolved to live submerged in seawater, forming dense meadows in estuaries and protected coastal seas around the world [
4,
5]. Habitats of seagrass support diverse and productive animal communities and provide several natural services to people, including commercial fisheries [
6]. The proximity of seagrasses to industrialized areas and centers of scientific investigation in North America, Europe, and Asia has encouraged a continued scientific focus. However, seagrasses are declining in many regions due to a variety of human impacts [
7]. Wasting disease caused by the slime-mold
Labyrinthula zosterae has periodically caused mass mortality of eelgrass (
Zostera marina) [
8] and is an emerging threat along some northeast Pacific coastlines [
9]. In order to determine the seascape-scale impact of the disease, and predict the future impacts with climate warming effects, a collaborative, multidisciplinary coastwide study was initiated and funded by a multi-university grant from the U.S. National Science Foundation to understand disease effects on seagrass beds and their multi-year dynamics.
UAV imagery with its high spatial resolution, temporal flexibility, and ability to repeat photogrammetry, affords a significant advancement over other traditional remote sensing approaches for change detection and assessment of coastal habitats [
10,
11,
12]. While a typical satellite remote sensing system, such as Landsat 8 OLI/TIRS, ASTER, or Sentinel-2, has a relatively coarse resolution of 10 to 30 m [
13,
14], image sensors mounted on UAVs capture higher resolution imagery (< 0.1 m) [
15]. Acquiring data with UAVs is often less expensive and more convenient than hiring out occupied aircraft, especially in remote and inaccessible places [
10,
16]. In addition, although satellites capture images of remote areas and difficult terrain, they often have infrequent and inflexible temporal revisit cycles. UAVs, on the other hand, can collect on-demand data. For coastal remote sensing, this means targeting UAV surveys during good weather windows and low tides. A variety of sensors onboard UAV platforms have been implemented and there have been many research projects employing UAVs to collect hyperspectral [
17,
18,
19] and thermal data [
20,
21]. With advances in multispectral mapping sensors, UAV imagery can achieve the same spectral resolution, but much higher spatial resolution compared to satellite imagery. UAV mapping can be widely used for a variety of applications, including habitat monitoring and environmental management [
10,
22].
UAVs are being rapidly adopted by a range of user groups from grassroots community groups to government scientists [
23]. Increased adoption of UAV technology for collaborative research also presents challenges when working with diverse users, and in variable environments [
24,
25,
26]. These considerations can limit broad implementation within developing PPGIS settings. Groups participating in collaborative research and management projects often include a diverse range of user groups varying in backgrounds [
27,
28,
29]. In addition, capacity for participatory engagement, including the number of personnel within a group participating, their time allocation to a project, and the technological tools at their disposal, may also differ across project participants [
3,
30].
While more advanced sensors can provide higher resolution and multiple color bands, there is much interest and demand for low-cost, off-the-shelf sensors on UAVs to support basic science. This training program focuses on low-cost RGB sensors on consumer-quality drones (specifically a DJI Phantom 4 Pro) as an avenue for increasing the utility of drones in marine science and monitoring projects by teams that include beginner drone users. We offer such an emphasis with the understanding that many science teams are interested in base-level data to support their fieldwork protocols, yet are unable to devote ample amounts of time and financial costs to engage in more advanced training programs or full degree programs or to purchase more expensive equipment. This article attempts to offer a compromise for such situations by exploring ways to train beginner drone users in the basics of drone operations, with the understanding that more advanced functions and systems should be done with more specialized teams.
The training program aimed to train local partners to use a cost-effective UAV solution for seagrass mapping and change detection along the west coast of North America, as well as facilitate the current ongoing research and coastal conservation activities of a larger collaborative grant. In doing so, the training program sought to develop a set of practices to guide coastal and marine science, and demonstrate potential training ideas for researchers at other sites to enhance the participation of novice drone users in their work. Our work suggests that seagrass monitoring field teams can effectively participate in the entry-level stages of drone training and basic flight operations to support broader work at their field sites. We recognize that many online resources are available to prepare trainees for a variety of tasks related to drone mapping. Teams with beginners have often expressed frustration to us about the breadth and variety of all of the resources available. We imagine that such frustrations exist beyond the teams we work with. For these reasons, and to support Findable, Accessible, Interoperable and Reusable (FAIR) science principles [
31], we aim to synthesize the basic elements of a drone training program to engage beginner users in basic science that can support marine environments and seagrass monitoring in the leading journal for drones.
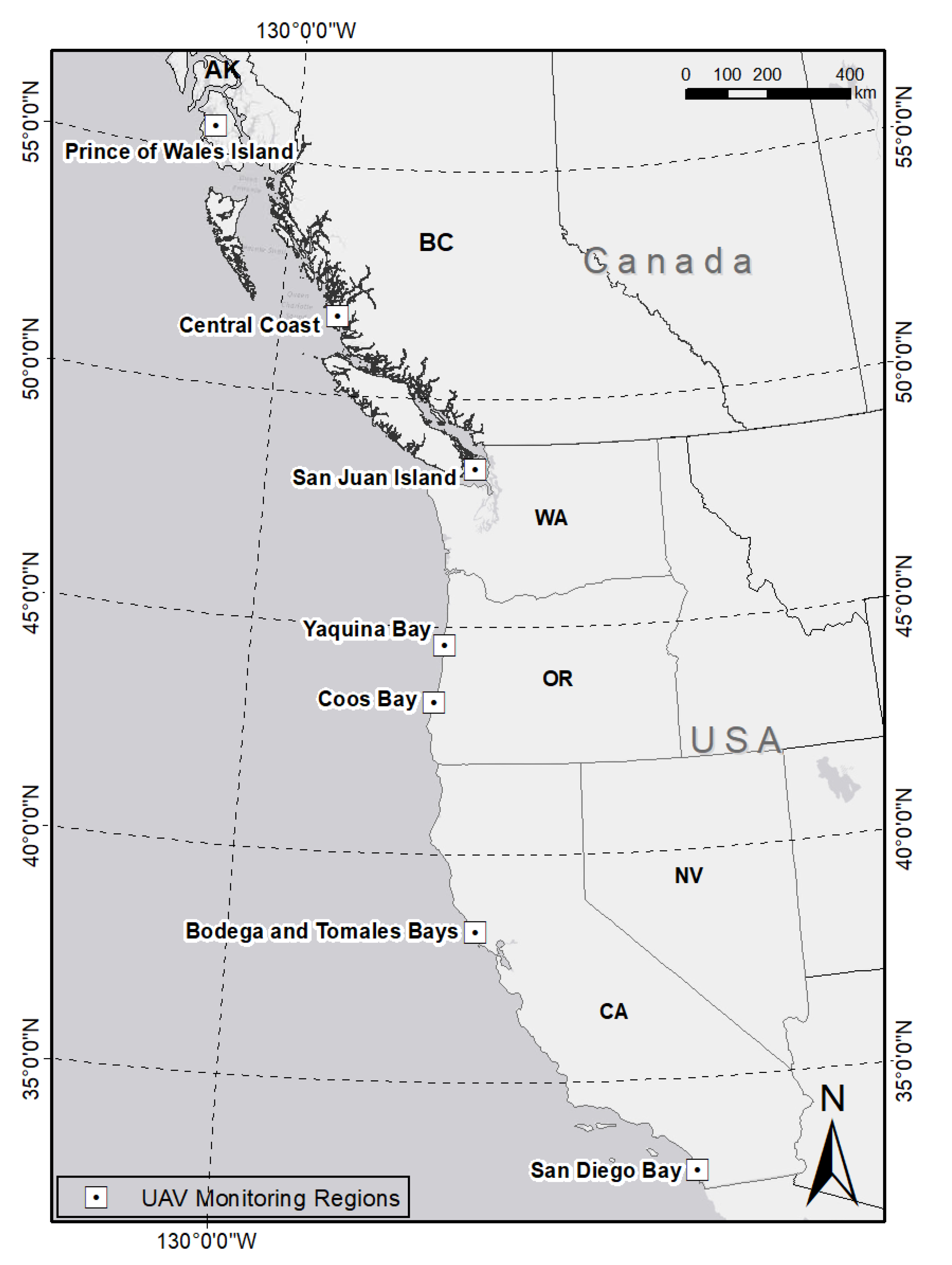
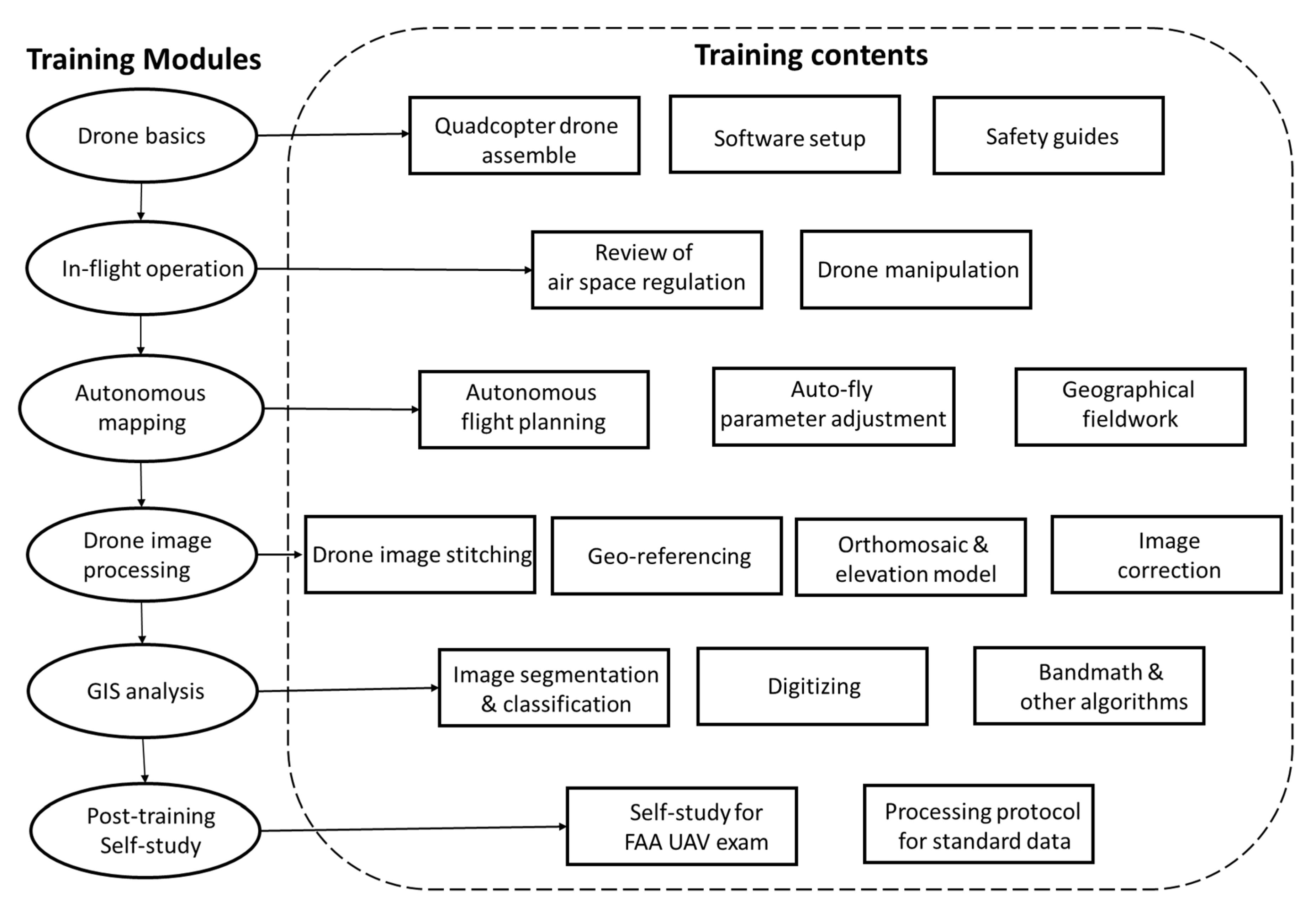
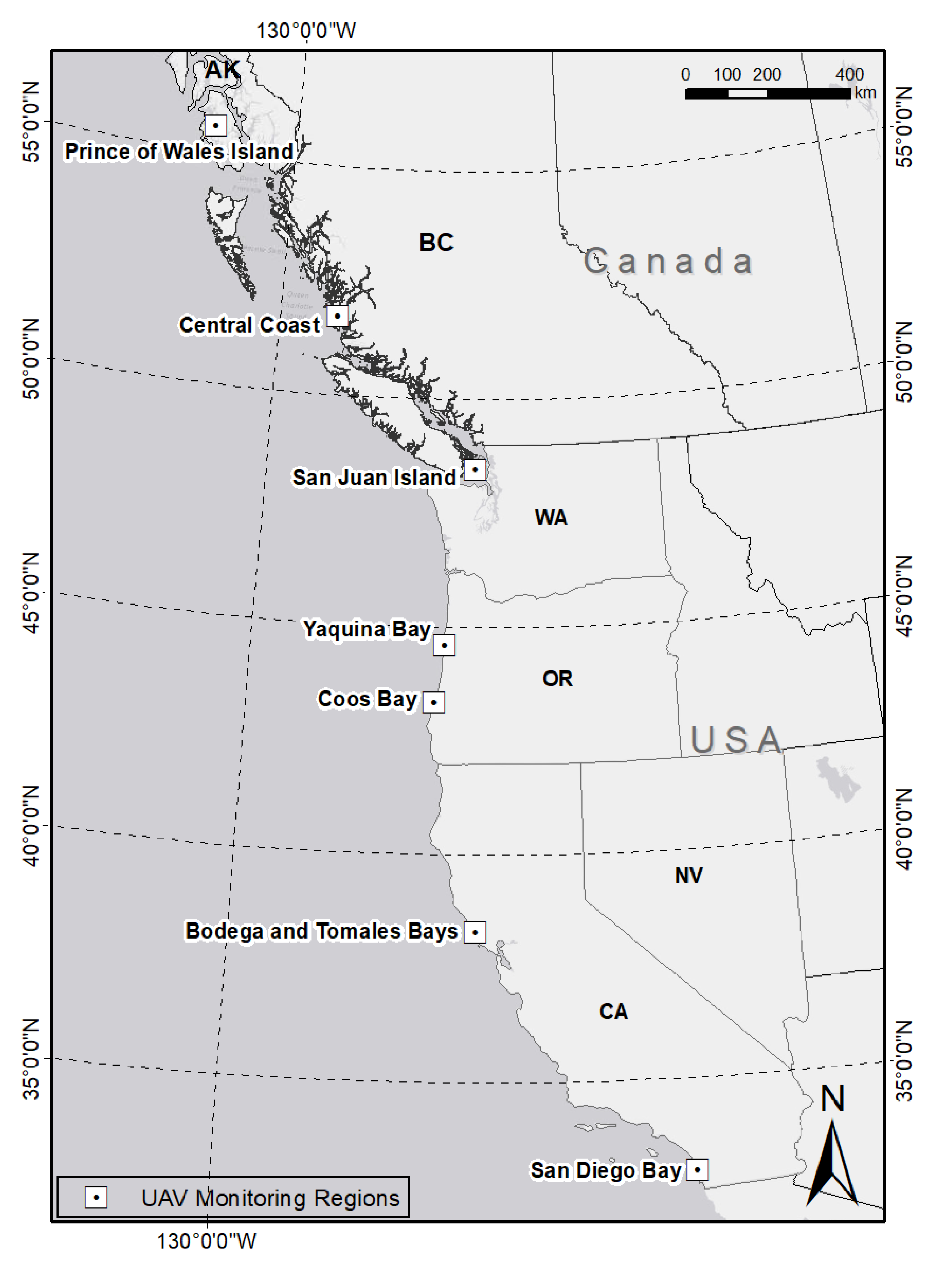
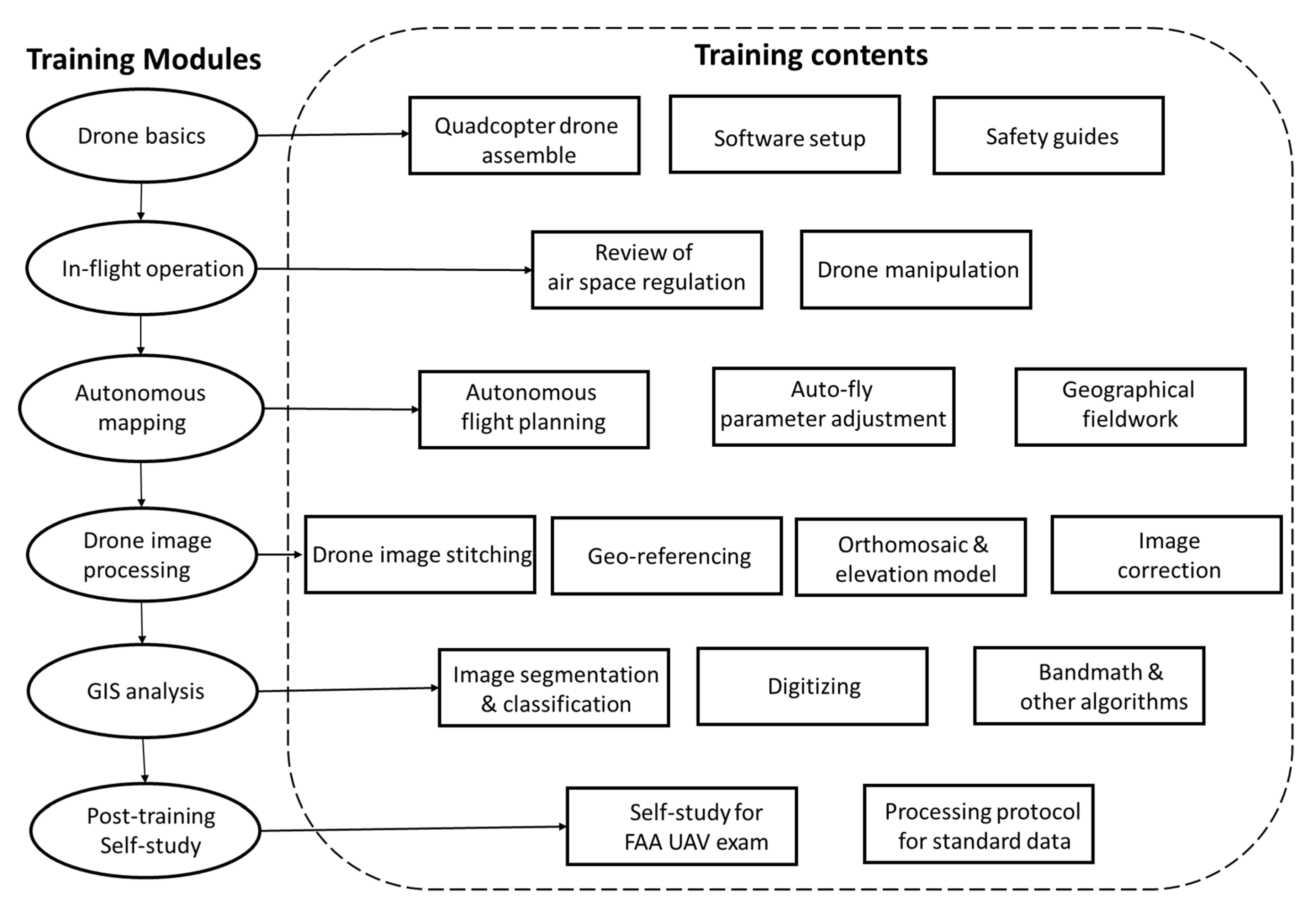
This study covers a wide range of environmental conditions, including a latitudinal gradient from Prince of Wales Island, Alaska (32.63, −117.28) to San Diego, California (55.47, −133.38). In order to broaden guidance for the implementation of drone methods in developing PPGIS research agendas in our work and in other contexts, we first review the methodological steps of our drone training course, including: how we assessed participants and provided training in drone operations; how we prepared, planned and realized flights; how we examined air space regulations; how imagery was processed and analyzed; and how data were managed. Self-study tutorials were assigned to the trainees to continue learning efforts for drone mapping. We then review the drone training course by summarizing variability in regional implementation, outcomes of the drone mapping process, and evaluation of the course by novice users. Together, this exercise aims to evaluate our process and inform our broader objective of providing adaptable, practical guidance for the use of drones in a longer-term PPGIS research context where many users may have limited drone training or experience.
Beyond the initial fieldwork training, we also discuss how our training activities continued through online collaboration. We further developed the online training course and used an online GIS platform to validate and share data with our research partners. To date, three partners in AK, WA, and CA obtained the FAA Part 107 license (a U.S. requirement for non-hobby drone flights) and contributed to time-series drone mapping independently. The steps outlined in this article demonstrate how introductory drone mapping training activities can work across disciplines to broaden the data monitoring network over a larger time frame and group of collaborators.
3. Outcomes and Data Products from the Drone Training Course
3.1. Implementation of Drone Training across Sites
At each study site (
Figure 1), 5–6 seagrass meadows were mapped as a collaborative component of annual seagrass monitoring for the broader project. While the course modules were standardized across regions, we adapted drone training course content to the different environmental conditions found from Alaska to Southern California, as well as localized regulatory rules for drone operations, which together influenced safety considerations across sites. In the following section, we describe the field considerations when drone mapping seagrass beds.
3.1.1. Planning and Training for Environmental Variability between Sites
There are many environmental variables that affect drone flying. One of the most important for seagrass growing in the intertidal zone is the timing of low tide to improve visibility of the subtidal edge of the seagrass bed. The timing and magnitude of tides varied within and between sites in this study. Planning for the hands-on drone mapping modules, and optimal mapping of all sites within a region, therefore, required paying close attention to the limitations imposed by differences in tidal height and timing of low tide across sites. The timing and magnitude of tides varied within and between the different regions and bays in this study. For instance, Tomales Bay in northern California is a long, narrow inlet approximately 15 miles (25 km) long and averages nearly 1.0 miles (1.6 km) wide. The low tide time is usually later than in other proximately located coastal areas due to the unique landscape. Planning for the hands-on drone mapping modules, and optimal mapping of all sites within a region, therefore, required paying close attention to the limitations imposed by differences in tidal height and timing of low tide across sites. Our mapping region is mainly focused on the intertidal area. Most of the area is not underwater during the low tide. When there are some submerged regions involved, our drone team performs calibration and water column correction with more advanced training in remote sensing and GIS, combining with the in situ measurements.
Rain, wind, and fog all frequently occur in coastal areas and influence drone flights, particularly in the Pacific Northwest regions of North America. During training flights, we required flights to be conducted with wind speeds less than 10 m/s, no heavy rain and no fog. Training across all study sites emphasized the constraints and strategies for mapping under less than ideal weather conditions.
Across all regions in this study, drone mapping was feasible when surface wind speed was less than 10 m/s. For sites with more consistent and stronger winds, the training emphasized safe drone procedures such as setting the flight parameters to fly slowly and stopping the drone when capturing the image. In addition, the UAV flight path was set to be parallel with the long side of the mapping area in order to minimize the UAV turning points and maximize battery efficiency. We also demonstrated to trainees how flying during windy days decreased flight times, so training modules also include planning for multiple battery changes when flying under windy conditions, and introduced trainees to the importance of polarizing filters, including ND4/PL, ND8/PL, and ND16/PL filters to reduce sun glare, glint over the water and increase color saturation when needed.
Foggy and rainy weather conditions are also common in the Pacific Northwest. FAA Part 107 regulations state that the UAV should not be flown in fog or other situations where the operator loses line of sight. Therefore, we reviewed the need for drone trainees to wait until areas were clear of fog to conduct the mapping. We explained to trainees that even when the fog has cleared, the air can remain humid which decreases the performance of the drone since the moisture over the drone can cause condensation. Hence, we stressed that the remote pilot should fly with extreme caution following foggy conditions. In general, foggy, rainy and windy conditions changed quickly across our study regions, which re-emphasized the need for our training to address methods for monitoring weather conditions and the in-flight response procedures by drone operators to accommodate variable weather.
3.1.2. Technical Planning for Coastal Drone Mapping
One of the biggest challenges of coastal drone mapping is that a relatively homogeneous water surface leads to difficulties in registering images because the image mosaic algorithm usually needs some target on the image as a matching point to stitch together images with overlaying parts [
37,
38]. To solve this problem, we used higher front/side overlap values (75–80%). At some sites, we also used buoys anchored on the water surface to help the image registration.
During image processing, rigorous geo-referencing is needed for the data to be useful for scientific research purposes [
39]. The coordinate locations of ground control points (GCPs) used for geo-referencing are used in the mapping software to geo-register the images to a known coordinate system. Using a Trimble R1 GNSS high-performance handheld GPS, we collected 10 points at each monitoring site. On land, we used large colorful objects, such as red buckets, that could be easily identified in the drone image. Over water, we used light-colored buoys with anchors fixed on the water. When collecting GCP points, we recommended that trainees started the GPS and wait until there were more than 12 satellites available for calculating the position. For each GCP location, we encouraged trainers to wait at least 90 s until the GPS signal became stable. Usually, GPS accuracy can reach 30–50 cm under cloudless weather conditions. For each GCP location, we collected 20 repeated measurements and used the average value as the input coordinates for geo-referencing.
The drone training course reviewed how to set flight paths, including flight direction and capture mode setting (
Table 1). In order to make the image stitching easier for the relative homogenous water region, we adjusted the overlap ratio to 65–80% and 60–70% for mapping at 200 ft and 400 ft, respectively. We used values higher than the default because coastal mapping occurs over a relatively homogeneous region with high amounts of water coverage. The higher value of the overlap ratio can eliminate the possibility of geo-registration failures due to low variation over water in particular.
3.1.3. Planning for Different Drone Regulatory Policies
U.S. Part 107 (FAA sUAS Part 107) specifies regulations to fly a UAV in the National Airspace System (NAS). Jurisdictional differences across study sites affected some flight restrictions under FAA regulations. For sites within controlled airspace, Low Altitude Authorization and Notification Capability (LAANC) and Certificates of Authorization (COAs) needed to be considered and planned for well in advance of drone operations. For some sites, due to FAA regulations, drone mapping could only be performed under certain altitudes due to mapping sites within the arrival/departure leg of airport runways. This influenced our site planning, including the decision to conduct flights at two different altitudes. Conducting flights at two different heights can generate two types of mapping products for multi-scale analyses. At 400 ft the spatial coverage is greater, while at 200 ft, the spatial resolution is finer (
Table 1). As discussed with trainees, tradeoffs between spatial coverage and resolution are important to consider at the outset of a project, and this approach allowed us to consider these tradeoffs, as well as collect standardized imagery at 200 ft for all sites despite regulatory limitations to flights at 400 ft at some sites.
There are similar regulations in Canada. All drones that weigh between 250 g and 25 kg must be registered with Transport Canada. FAA certification (U.S.) is not applicable in Canada, and drone pilots must follow the rules in the Canadian Aviation Regulations (CARs) Part IX—Remotely Piloted Aircraft Systems. The drone mapping work in Canada was conducted by a research team of pilots with Canadian drone certification. The same model of drone and mapping parameters (elevation, speed, sensor, etc.) were used for both Canadian and U.S. study sites.
3.2. Results from Drone Training Implementation; Derived Data Products
As part of the drone training program, maps of seagrass beds were created in all regions for use in scientific analyses of disease ecology and other applications. Some of the maps were produced by trainees with limited training in geography and remote sensing who participated in the drone training course. We share these results here to demonstrate that even beginner drone users can create useful products to support basic science in fieldwork sites. We recognize additional advanced analyses take more training, cost and time, but for teams wishing to include low-cost and basic drone imagery operations in their fieldwork to support FAIR principles, the data products created from trainee flights in the drone training program offer much promise.
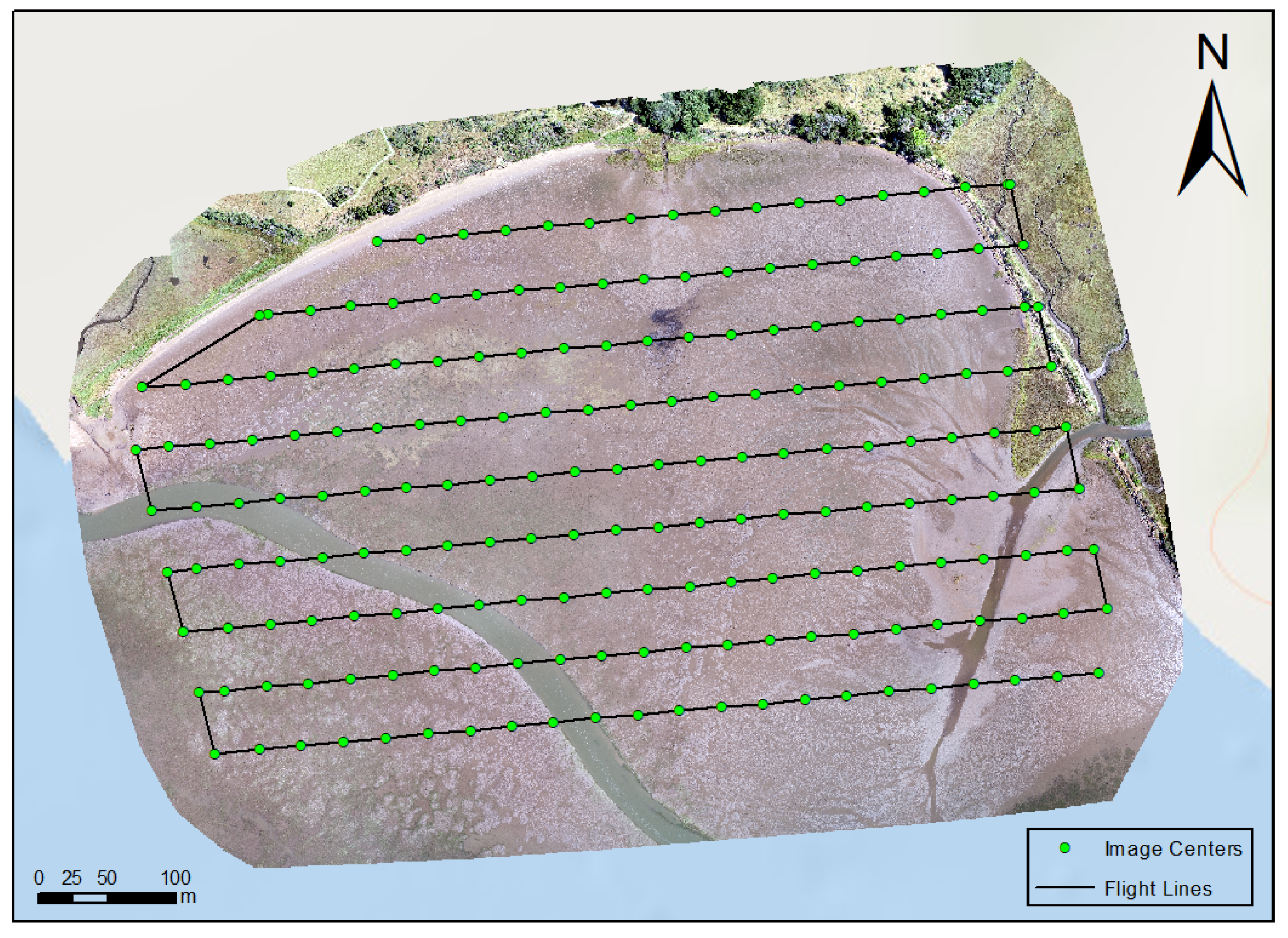
Figure 3 shows an example of the drone mapping plan for Millerton Point seagrass bed in northern California. The mapping altitude was 400 ft (120 m). The drone flight path was set to be parallel with the long side of the seagrass bed because the drone uses extra time for turning and switching to the next mapping line (
Figure 4). From the image stitching results of the mapping products (
Figure 4), the drone mapping results are processed to a complete orthomosaic map. All the surface patterns and features are well-captured with all images geo-registered.
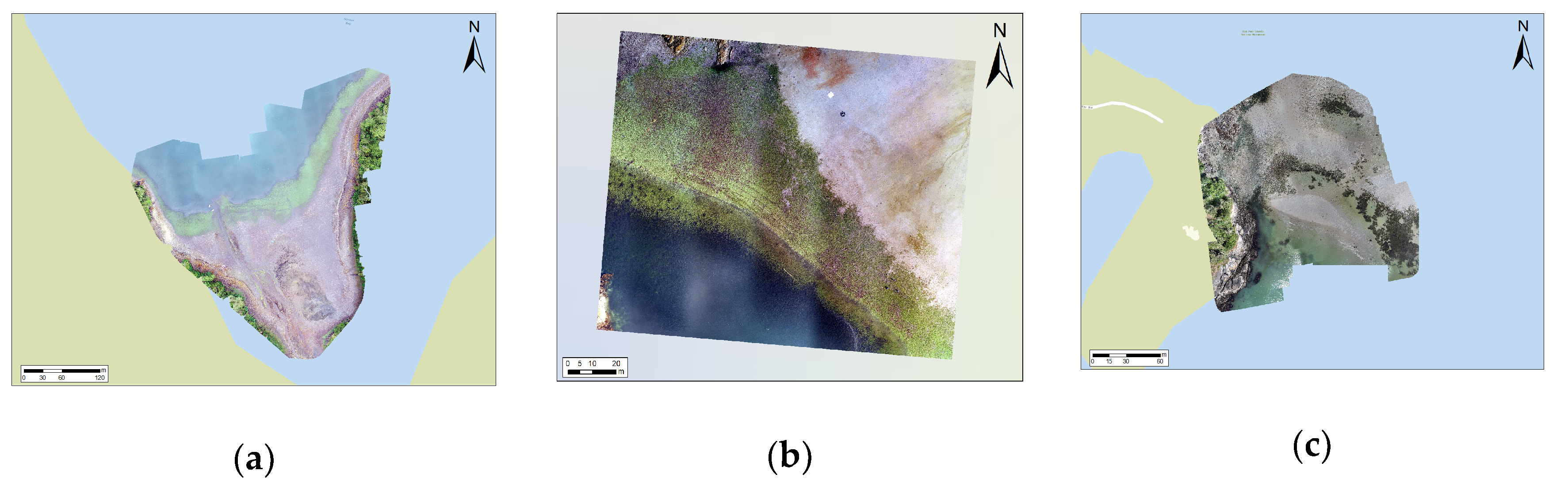
Drone mapping product examples show the variability in site characteristics across this study (
Figure 4). The site-level orthomosaics show differences in the seagrass beds in terms of their spectral and spatial patterns. By visual inspection, it can be seen that the drone mapping captured the spatial details of the seagrass bed very well. The spectral and texture differences of the seagrass meadows are very clear in the drone mapping at 2–3 cm spatial resolution. For example, the greenness of the seagrass meadows in Alaska and BC, Canada are significantly richer than other sites. By comparing the drone mapping orthomosaic against the Google Earth satellite imagery, the high-resolution drone orthomosaic image captured the seagrass with much more detailed spatial information.
Once the drone imagery was processed to a map covering the study area, there were a few procedures needed to validate the quality of the map. We shared these basics with our trainees. The image needs to be reviewed with GPS locations and field photos to validate location bias and image quality. Moreover, the data need to be reviewed further with respect to large data gaps, image distortions, or artificial effects. After data cleaning and validation in our work, the validated maps along with their metadata were uploaded to ArcGIS Online directly from Drone2Map.
3.3. Preliminary Assessment of the Drone Training Course
In order to evaluate the drone training program, we created a short survey that was completed by 40% of the trainees. Overall, the training program was well-reviewed (5 out of 5 for survey questions addressing the training course’s overall quality of presentations and interactive learning opportunities).
Our survey also asked about the role of drones in future research (4.3 out of 5), which indicated that most of the trainees strongly agreed that UAV training would facilitate their future research in biology and marine science. Several of the responses to the open-ended questions discussed the relevance and importance of drone training. For instance, a professor in marine science commented on drone training:
Good introduction to the drone, how to fly it and what you can do with the data. I feel like I have a very good understanding of how things work, what kind of data we get, and what sorts of things one could do with the data. Really enjoyed it. Learned a lot. Less afraid of drones and more understanding of what the drone component of the project can contribute to work like this.
Additionally, some comments from post-doctoral researchers and graduate students in biology and marine science also discussed the importance of the drone training program:
The drone training course was great for general information about using a drone and what kinds of data you can obtain from drone and satellite images.
I got a good sense for what the drone can do, partly from the course and partly from watching the drone team in action in the field. I’m glad we got to go through both the mechanics of flying the drone and some of the basics of image analysis.
Though I now know so much more than I did before about drones (which was essentially nothing!), I still would like additional practice flying the drone with others who are experienced prior to needing to fly it independently.
Additional comments also emphasized the need for more practice and hands-on learning experience in future years of the research project.
One faculty member commented that:
If you really wanted us to be able to do independent fly, I think you’d need to have a lot more time devoted to this and more than we were able to give during the time you visited, given that we were doing our own sampling as well. So for the amount of time we had available, I thought the course was great. If we want to get the trainees to actually be proficient, then maybe in year 2 or 3 we should have one of us actually do the full drone mapping of one site with you when you visit.
The survey received a rating of 3.2 out of 5 when trainees were asked about their ability to fly the drone independently after the training. These scores reflect the short duration of the course (10 h of initial training). To help gain confidence following the training course, we also shared the training documents, software packages, and labs for self-study after the summer fieldwork.
3.4. Post-Training Materials
Although this introductory UAV training program was launched in a series of modules completed in a face-to-face environment with supervised flights for each individual trainee, for each site there were only 5–6 days to initiate training. To further build a UAV monitoring network based on this training for expansion in future years, we developed an open-access training page on Github to continue the online training. These online materials complemented the face-to-face training program allowing three partnering sites (AK, WA, and CA) to successfully obtain at least one pilot with an FAA Part 107 license within one year after the training, and allowed team members to begin collecting time-series UAV images independently and sharing the data via our online platforms.
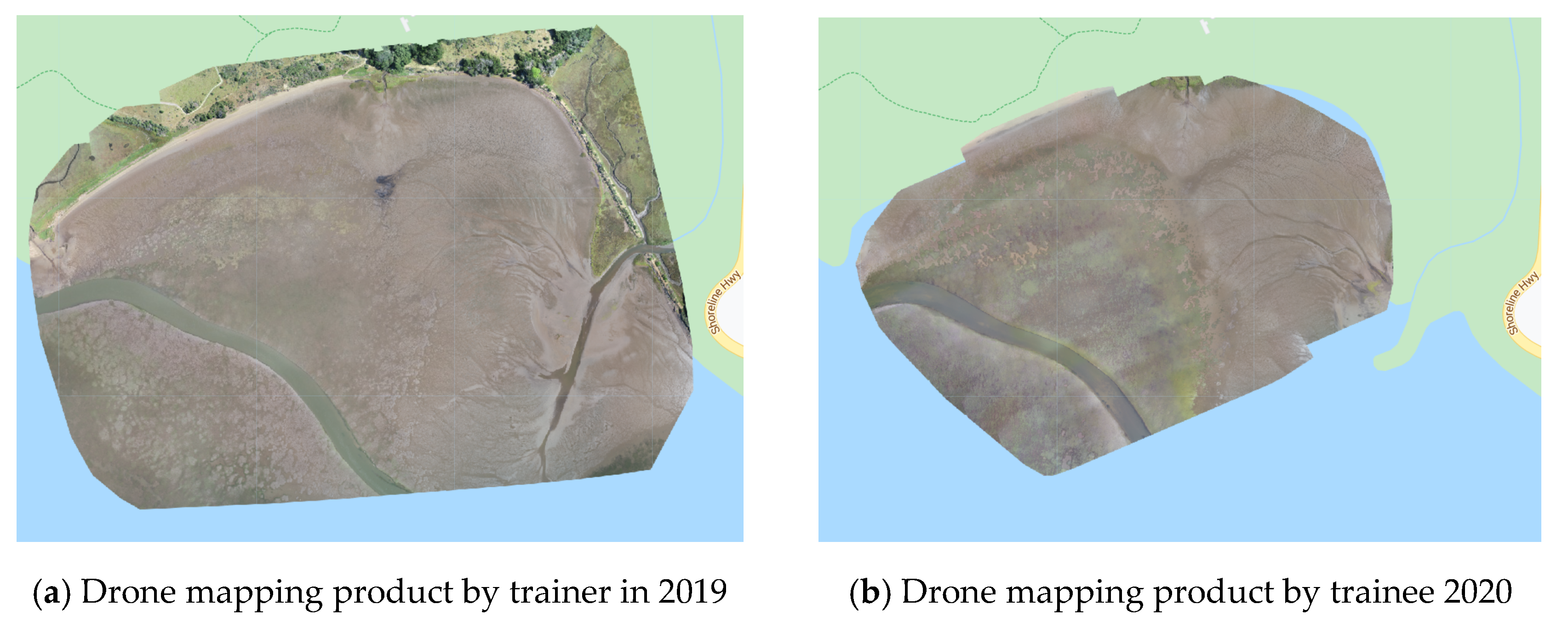
Figure 5 shows an example comparing drone mapping products for the Millerton site. On the left is the drone mapping product by a drone trainer in 2019; the right is a drone mapping product by a trainee in 2020. Such products demonstrate that beginner drone users having completed an introductory drone training program can provide useful data similar to an expert team. The detailed comparison in the online GIS platform (Google Earth Engine) can be found here (
https://hao2309.users.earthengine.app/view/eelgrass-drone-image-demo).
4. Discussion
Above, we described a training program for predominantly novice drone users during an inaugural drone mapping campaign across our seagrass project’s monitoring sites. Lessons learned from our study contribute to our broader aims of developing a more general training protocol to facilitate seagrass monitoring work for various stakeholders in other areas. As such, the drone training completed in summer 2019 serves as a baseline for the development of a PPGIS process at the study sites and for consideration in other seagrass study areas around the globe. In the spirit of FAIR principles and open science, we share the training program objectives, Github site, and detailed explanations of the modules in order to show how novice trainees can be incorporated into a drone monitoring process to support basic science fieldwork. Our goal in the broader NSF grant is to take lessons learned from the introductory drone training program to eventually train community-based organizations, citizen scientists, students and teachers, scientists from other disciplines, and practitioners from a range of institutions. Time-series monitoring is critical for understanding the spatio-temporal dynamics of seagrass beds and can be enhanced through participation from beginner drone users. Such training to support basic drone operations for beginner users can be beneficial for future interdisciplinary efforts on coastal management and seagrass conservation. This is particularly important for teams like ours who are interested in engaging in additional efforts to broaden involvement in drone mapping for a monitoring network.
PPGIS pertains to the use of GIS to broaden public involvement in policymaking and to support the research needs of community stakeholders, grassroots groups and community-based organizations [
2]. Collaborative engagement with local organizations and interdisciplinary researchers is often cited as one of the most valuable aspects in interdisciplinary collaborative settings [
24], and can support scientific research in a variety of ways. Most information used in policymaking, whether with regard to land-use planning, environmental monitoring, habitat conservation, or social service provision, contains a spatial component. For example, seagrass beds have spatial parameters organized across different spatio-temporal scales (i.e., extent, density, bed size) [
40]. Yet these spatial parameters are often the most difficult to characterize by scientists sampling seagrass and other ecosystems in the field. The incorporation of drones and GIS allows important environmental information to be analyzed and visualized spatially, and the resulting outputs (mainly maps) can persuasively convey ideas and convince people of the importance of those ideas [
41]. Therefore, extending the use of spatial information from drones and GIS platforms to all relevant stakeholders can lead to a stronger interest in scientific research and policymaking [
3].
As noted in our methods and results, we suggest that scientific teams wishing to include drones at a basic level in their work, consider all of the following when creating drone training opportunities for their teams. The practical considerations outlined in our training program come with time and cost constraints, which is why in our study (and in our recommendations to the broader community) we suggest front-loading the training process with the understanding of in-flight operations, regulatory and licensing guidelines, and autonomous mapping features. In our experiences, these are the initial steps needed to include new team members in drone workflows. We also recommend that teams find drone experts at local universities/colleges or in industry/consulting groups to provide training to their teams in a collaborative manner. Such training comes with highly variable costs. Teams like ours, for example, are focused on open access and low-cost training opportunities to support the next generation of novice drone operations. In this spirit, we outline our workflows and provide all training materials as open access documents following FAIR principles [
31] and outline our training program on our Github site. We encourage other groups to share their knowledge through open science and collaborative workflows where possible to grow the opportunity for engagement with this expanding technology.
Training novice users does present some limitations that can be improved upon in future work. An immediate challenge is the cost of entry into drone operations. Our team specifically uses low-cost, out-of-the-box, consumer-level drones where possible in order to limit the initial financial barriers and learning curve present with more expensive and advanced models. Our imagery demonstrates that high quality, sub-meter level imagery in the RGB spectrum can be collected from such drones, yet more advanced features and multispectral or thermal imagery will need more expensive systems with a steeper learning curve. In that sense, our work limits the possibility to explore seagrass at additional wavelengths, though such work is planned for future project years with our trainees. We would encourage teams of novice users to first gain comfort with basic consumer-level options to begin their work. As they gain experience and comfort, adding more advanced drone models and sensors is an opportunity for growth. A second challenge to training novice users is related to how to process, store, and manage the high volume of drone data. Our trainees across all study sites showed strong interest in incorporating drone work, but also cautioned that drone integration would require additional logistical considerations in addition to necessary in situ sampling.
We suggest that teams weigh the costs and benefits of investing in training as they consider the inclusion of drones in their workflows. Such training is increasingly important as participants in collaborative research and management projects often include a diverse range of user groups, including community-based organizations, citizen scientists, students and teachers, scientists from other disciplines, and practitioners from a range of institutions [
27,
28,
29]. In such cases, this large range of potential drone users may affect the level of knowledge and worldview that participants bring to the project, which can differentially impact a group or individual’s receptivity to, and ability to uptake new knowledge, educational materials and training. In addition, capacity for participatory engagement, including the number of personnel within a group participating, their time allocation to a project, as well as the technological tools at their disposal, may also differ across project participants [
3,
30]. Teams must think through practical costs and benefits of including these groups in their work effectively. Our work in this study suggests such opportunities are possible if novice users are exposed to multiple aspects of drone mapping workflows.
By providing drone training to a wide group of users, especially those with limited UAV backgrounds, our case study demonstrates one approach for expanding broader partnerships in coastal management and seagrass conservation. Our process considers the broader PPGIS themes of people, places, technology, and evaluation to support novice users in seagrass monitoring sites across the west coast of North America. Based on the drone training evaluation, partners were generally satisfied with the drone training course. Most participants strongly agreed that our drone training course facilitated their seagrass research and provided a powerful tool for monitoring seagrass over time and space. Participants felt that the training was well organized and effective for basic drone operations and initial flights. However, both drone mapping and training were performed within a limited time, so more training time and practice are needed for drone flying and more advanced GIS and imagery processing. Future training will build from the first year training experiences, and also include additional emphasis on data cleaning and post-processing. Greater efforts are needed to expand our drone training model to encourage novice users to engage in systematic, scientific studies of coastal seagrass in other study areas around the globe. Nevertheless, we have made significant progress toward the goal, and produced new landscape-scale products that will be valuable to the scientific understanding of coastal seagrass ecosystems while encouraging novice drone users to incorporate these emerging technologies into their work with proper training and support. We envisioned our drone training program as an important part of a long-term research project focused on seagrass monitoring, whereby trainees could take more time to further digest and practice drone training and GIS analyses on their own and with our training team and potentially engage in more advanced drone training in future years at the fieldwork sites. Yet, the beginning stages of our drone training program offer much promise and several lessons learned that are shareable with the broader community. Work such as ours supporting FAIR and open science principles offers the potential for beginner users to contribute useful data to basic science by incorporating drones into their fieldwork processes after introductory training experiences.

 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}