1. Introduction
In recent years, a system named Wide Area Monitoring Protection and Control (WAMPC) has been introduced to power systems covering supervisory control and data acquisition (SCADA)’s shortfalls, in which Phasor Measurement Units (PMUs) are the main components of this system, providing synchronized real-time signals with the aim of making the network observable [
1]. Data obtained from PMUs have revolutionized the power system analysis. In [
2,
3], event locations are estimated online using the data gathered by PMUs. Utilizing the benefits of real-time PMU data, early warning to the angle instability is possible which can protect the power system against blackouts. In this respect, a model has been presented in [
4] to produce a very quick and efficient response to angle instability. Similarly, taking advantage of the PMU’s accurate data, the network voltages can be monitored closely to have a more reliable system from the instability point of view. This issue has been addressed by authors of [
5,
6,
7,
8]. Controlled islanding as another strategy to prevent cascading blackouts was mainly investigated from the aspect of either optimal splitting surface determination or the start-up criterion; by increasing the penetration of PMUs in power systems, a more efficient method has been developed to include both aspects [
9].
The previously stated benefits can be derived without any necessity to install PMUs at all network buses. This is because a PMU can make its neighboring buses observable by measuring accurate and online current and voltage phasors. On the other hand, the device requires suitable infrastructure such as communication links, which are sometimes cost-intensive, to be prepared. Here the problem of Optimal PMU Placement (OPP) arises to achieve the objectives using the minimum possible PMUs installed. In [
10,
11,
12,
13,
14], the problem of OPP has been carried out attempting to observe the whole network. In addition to this goal, the authors in [
15] have proposed an OPP scheme more suitable for the state estimation and post-estimation. Through this method, the matter of bad date detection can be significantly improved by fixing the extra PMUs at strategic buses. Similarly, a new OPP with the aim of improving the state estimation has been investigated in [
16] using the Genetic Algorithm (GA). Therein, considering the Zero Injection bus (ZIB) in the observability rules introduces nonlinearity to the problem [
10,
12]. Though utilizing an evolutionary algorithm can handle the nonlinear problem [
12], mathematical linearization techniques have always been the preference due to their considerable advantages [
13,
14,
17,
18,
19]. In this regard, modeling the ZIBs in the OPP problem beside the redundant PMU placement has been addressed in the framework of Integer Linear Programming (ILP) [
19]. In recent years, PMU placement studies have given more practical considerations. Due to presence of conventional power flow and injection measurements in the power system, an OPP model has been solved considering such devices [
14,
20]. In reality, PMUs come with the limited number of communication channels that restrict them to measure all entering branches. To consider this limitation, several studies have been carried out to assign the PMU channels to specific transmission lines [
11,
21]. Moreover, thanks to the valuable experiences from a real-life project, Rather et al. in [
22] have considered some major hidden costs in the OPP problem to propose a realistic cost-efficient model instead of widely used OPP that minimizes the number of PMUs. Based on this study, the four major factors which impose a considerable financial burden to a PMU installation project, next to the PMU cost, are the costs related to instrument transformers, shutdown during installation, communication infrastructure and building suitable foundations.
Apart from the methodologies used to model the OPP and the abovementioned considerations, there are two distinct viewpoints in terms of observability, that is, deterministic and probabilistic. From the deterministic point of view, a PMU can make a bus either observable or not. Under this broader definition, the exact description of the complete and incomplete observability as well as the concept of the depth of unobservability has been addressed in [
23]. So far, the OPP is usually investigated from the deterministic viewpoint [
10,
11,
12,
17,
19,
20,
21,
22,
23,
24,
25,
26]. However, the probabilistic concept of observability provides more realistic insight. Indeed, not only does the probabilistic definition of observability include the effects of PMUs on its own, but also considers some more related practical aspects such as the impacts of availability of lines, PMUs and their communication links on the observability of a bus. In [
27], a probabilistic version of the observability is defined to include the mentioned factors while ignoring the presence of ZIBs. In spite of the deterministic contingency-constrained PMU placement model [
10,
13,
14,
17,
21] which considers the N-1 security criterion on lines and PMUs, the probability of line and PMU failures, derived from the history of the system and equipment, are taken into account in the probabilistic model [
28]. In [
18], a multi-objective OPP has been studied considering a similar concept of observability in a probabilistic framework, attempting to maximize and minimize the expected value of system observability and the number of PMUs, respectively.
In reality, large scale power systems usually generate a huge financial burden because of the costs related to PMUs, preparing the infrastructure, and installation. Moreover, technical restrictions avoid installing all the needed PMUs over a short period of time. Thus, the PMU installation is done over separate planning stages for a specific timetable as a Multistage PMU Placement (MPP) optimization problem [
24]. In the deterministic framework, the MPP has been investigated with various objectives such as maximizing the network observability over the time horizons [
25], maximizing tie-line observability by means of the analytic hierarchy process method [
26], and phasing PMUs in order of precedence at sparse locations [
29]. Furthermore, the delivery costs for PMUs’ relocation is investigated in the MPP context in [
30]. Authors in [
31] have included communication infrastructure costs as well as the installation cost. On the other hand, the probabilistic MPP has not been much focused thus far. In this regard, Ref. [
27] has proposed a probabilistic model for MPP introducing an index for the system. It is worth noting that in all the above-mentioned MPP studies, the methods of MPP mainly used are the same. That is to say, firstly, the PMU placement of the initial stage is carried out. At the next stage, another optimization is performed under a condition that those buses obtained from the results of the first optimization are put aside from the search space. In other words, the input for the second optimization is limited, leading to a smaller search space.
This paper aims at improving the power system monitoring during the planning stage by presenting a comprehensive linear model for the probabilistic MPP while practical issues are considered. The main contributions of the paper are listed below.
Proposing a linear expansion model for the probabilistic MPP to consider ZIBs, for the first time: Modeling the ZIB has been always a great challenge in terms of the linearization. This is why previous research has used evolutionary algorithms such as Particle Swarm Optimization (PSO) [
32,
33], Imperialist Algorithm [
34] or non-linear programing [
35,
36]. But, among all optimization methods, linear programming is in preference to others due to two main superiorities; assuring the global optimum of a problem in convex models and the capability to be implemented in large scale cases.
In the probabilistic framework, a linear technique is used for MPP in search of the global optimum solution in the complete search space with the help of manifold auxiliary variables, all by performing one optimization run. Finally, the model is strengthened so as to consider the channel capacity of the PMUs and the network topology changes resulted from the expansion planning in power systems.
Providing a realistic context of the MPP scheme desirable for system operators: In order to implement a practical MPP, the proposed model is able to utilize inputs gathered by system operators; and to install PMUs at buses, which are of highest importance based on a pre-determined policy, earlier than other nodes. Indeed, this model allows the system operators to weigh the network buses’ importance according to their preferences to monitor the critical areas of the network such as dynamic suspected areas, power plants, tie lines or any other strategic nodes in earlier stages of the MPP.
The remainder of the paper is organized as follows. The motivation of presenting this paper is discussed in the
Section 2. In this section the primary difference between the proposed MPP method and the conventional method is thoroughly described. The proposed linear expansion is formulated in the
Section 3.
Section 4 suggests the numerical results, including a comparative case study. Finally,
Section 5 points to several conclusions of the research work presented.
3. Problem Formulation
The probabilistic definition deployed in this paper is similar to that presented in [
27]. However, the most significant point drawing a distinction between that introduced in [
27] and the one presented in this paper is that the latter has been strengthened with the capability of the ZIB modeling. In the following, first the proposed probabilistic index is introduced in
Section 3.1 and the dynamic multi-stage PMU placement formulation is presented (
Section 3.2). Afterwards, in
Section 3.3, the mathematical linear expansion is scrutinized.
3.1. Probabilistic Observability Concept
Based on Kirchhoff’s Current Law (KCL), between a ZIB and its neighboring buses, if all buses are observable except one, that unobservable bus can be met by applying the KCL at the ZIB [
13,
14]. Accordingly, the probabilistic observability function of the bus
i at stage
t can be formulated as below:
where
is a binary decision variable showing the presence and the absence of the PMU at bus
j when this value takes 1 and 0, respectively. Set
indicates all network buses. Also,
represents the probability of the observability of the bus
i because of the presence of a PMU at bus
j. This constant value has been defined as:
where
and
are the availability of the PMU current measurement at the line
i–
j and the availability of PMU voltage measurement at the bus
j, respectively. Moreover,
and
are given and show the availability of the successful operation for PMU at bus
j, and its communication link, respectively. Furthermore,
represents the availability of line
i–
j. In (2),
represents the connectivity of buses
and
That is to say, if buses
and
are connected,
is equal to 1, otherwise this parameter would be zero.
In order to model ZIBs, the product term
is employed. In this term,
is an auxiliary binary variable that is equal to 1 if the bus
i can be observed by the effect of the zero-injection at bus
j; otherwise 0. Also,
is a binary parameter that is equal to 1 if the bus
j is a ZIB; otherwise 0. Thus, the observability function of the bus
i would be equal to 1 if the bus
i can be observed either by installing the PMU at this bus or neighboring buses through
, or by the effect of ZIB through
. Parameter
is the product of probabilities of all factors that the zero-injection bus
j makes either one of its neighboring buses or itself observable.
Here, the probabilistic index at stage
t for a network comprising
N buses can be defined as the Average of the Probabilistic Observability (APO) as below:
3.2. Probabilistic Multi-Stage PMU Placement with Incremental Search Space
Unlike common methods used for the MPP dedicating several separate optimizations corresponding to each planning stage [
24,
25,
26,
27], this paper takes the advantage of the method used in [
39], known as the dynamic MPP. The method searches for the optimal solution in the whole search space in just one optimization run, while in traditional approaches, specific buses are firstly chosen to be equipped with PMUs for the first stage by means of an optimization problem. Afterwards, these buses are put aside from all candidate buses and another optimization is performed for the second stage. The steps continue for all stages through several optimization runs. This procedure sometimes leads to missing some parts of the search space, as discussed in [
39].
In order to install a specific number of PMUs at the pre-determined buses (e.g., set
), over
M planning stages, the proposed MPP is as follows:
subject to:
Expressions (6)–(9) represent the problem constraints. In (5), is the system probability index at stage t. Equation (6) points to the scheduling table of each stage. Indeed, shows that how many PMUs should be installed at stage t which must be in accordance with the pre-defined planning timetable. It is apparent that if a PMU is located at bus i at stage t, this bus remains observable for the upcoming stages. In this respect, inequality (7) is utilized. Equation (8) guarantees that the PMUs are chosen just from the set . Moreover, constraint (9) is added in order to complete the ZIBs’ modeling. This constraint ensures that one of the buses which are incident to a ZIB, or the ZIB itself, can be observed by the effect of the ZIB through KCL. This claim can be obviously proved by the following deduction. When bus j is a ZIB, the right hand side of (9) is equal to 1. Hence, exactly one auxiliary variable of buses which are incident to bus j or the auxiliary variable of bus j, would be equal to 1. Otherwise, the right hand side of this equality is zero. Therefore, all auxiliary variables of buses which are incident to the bus would be equal to 0.
3.3. Mathematical Linear Expansion for the Problem
It is obvious that the objective function (5) is nonlinear since it includes some product terms. Indeed, this nonlinearity stems from th variables mentioned in (1). It should be noticed that the nonlinearity, and therefore the complexity, existing in (11) is much more intense than that stated in [
27], because of the added product term related to the ZIB. In the following, a proof for linear version of the
(Equation (1)) and the objective function (5) is presented.
It is simple to understand that the product term of (1) is defined as the unobservability function (
) where its expanded form is derived as:
Now for linearization, the auxiliary variables
and
are employed. Assume that:
and
Thus, it can be concluded that:
According to (11) and (13), if a PMU is placed either at the bus
i or its neighboring buses at stage
t, the auxiliary variable
becomes zero. Therefore, the unobservability function (
) would be equal to zero, subsequently. Moreover, according to (12) and (13), if the bus
i at stage
t becomes observable, being affected by a ZIB, then, the auxiliary variable
becomes zero. Thus, the unobservability function (
) would be equal to zero, subsequently. Hence, the nonlinear expression
used in (13) could be converted into the linear version using the following constraints:
So, in general, the linear form of the objective function (5) is formulated as (18):
where (15)–(17) and:
Constraints (19)–(20) and (21)–(22) are the linear equivalent form of (11) and (12), respectively. The proof of these sets is similar. In the following, the proof for set (18) and (19) is presented. According to (11), 0 ≤ ≤ 1 since is either 1 or 0 and, lies in [0, 1]; likewise, 0 ≤ ≤ 1 since it results from the product of two terms which both lie in [0, 1]. In general 0 ≤ ≤ 1; . In order to consider the effect of the installed PMU at bus j on the probability of the unobservability index of the bus i (), the third and the fourth inequalities of (19) are employed. In this case, . This equality is exactly the same as the one seen in (11). Notice that, and lie in [0, 1], so, 1 ≤ ≤ 1; thus, the first and the second inequalities of (19) are complied. Similarly, according to (11), if there is no PMU at bus j, should be equal to while the first and the second inequalities of (19) guarantee this equality. In this case, the third and fourth inequalities would be complied since
Finally, in order to solve the proposed MPP, the integration of the objective function (18) and constraints (6)–(9), (15)–(17) and (19)–(22) should be taken into consideration as a mixed integer linear programming.
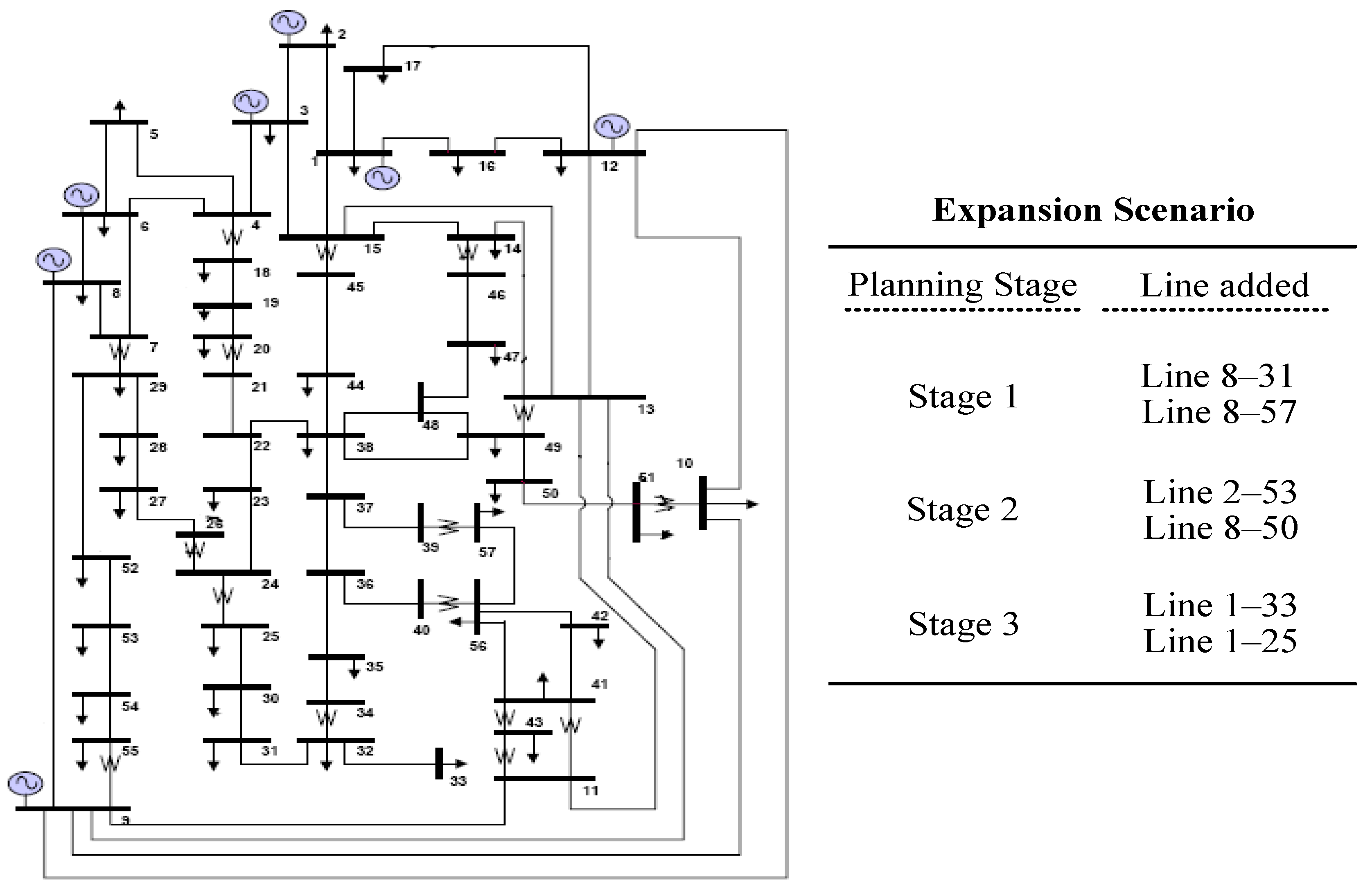
3.4. Power System Expansion Planning Consideration
Knowing the expansion scenario over the PMU installation horizon, changes in the network topology can be considered by updating the network connectivity data for each stage. In this regard, the binary connectivity parameter is replaced by . Parameter is defined as the binary parameter associated with the connectivity of buses i and j at stage t. This modification is based on the assumption that zero injection buses stay immutable and there are no changes in the generation or load bus over the placement horizon.
3.5. PMU Channel Limit Consideration
In practice, a PMU has a limited number of communication channels to measure the current phasor of the entering lines.
Figure 1a demonstrates a schematic PMU with the unlimited communication channel, while the PMU in
Figure 1b is able to measure just two entering buses due to channel limitation. The connectivity parameter
used in the above formulation links bus
i to all buses that are connected to it based on the network graph. This definition of
is suitable for a PMU having unlimited channels. In other words, for
Figure 1a,
. In
Figure 1b, although the buses
j,
k and
n are connected to the bus
i, according to network graph, the PMU does not observe them. Hence, it is possible to model the PMU channel limits by applying the modification in the connectivity matrix where a PMU is supposed to measure a limited entering lines’ current phasor. To serve this purpose, parameter
must be transformed into
. Parameter
is a binary parameter mentioning that the PMU placed at bus
i has a channel forward bus
j if it is equal to 1, otherwise 0. In
Figure 1b,
and
.
It is worth noting that this parameter is obtained from the single stage OPP for the final year. To explain in simple words, is the input of the MPP and it is already known.
3.6. Monitoring Priority Consideration
Buses are not all of the same importance in power systems. A general classification distinguishes the load buses from the voltage controlled buses where generators are connected. From the dynamic point of view, monitoring the latter class, such as power plants, is of great significance compared to load buses. On the hand, power system planners and operators may follow other principles with different preferences. Thus, they may tend to observe the dynamic suspected areas more than other buses, or it may be crucial to observe nodes having a decisive role in power system market. Accordingly, in order to consider more technical aspects, the proposed MPP has been enhanced using a weight factor,
, allowing the system operators to weigh the network buses importance from their priorities. In this respect, the objective function (5) is modified as Equation (23). It should be noted that the linear form of Equation (5), that is, Equation (18), can be modified, similarly.
where
is the mentioned weight factor associated with the bus
i. Under such circumstances, the system operators should compare the network nodes and weigh them in a proper way. As default, the factor is equal to one for all nodes when they are of the same importance. Also, if the system operator decides to observe a bus at the earlier stages of the proposed MPP, a big constant number should be devoted to the related weight factor, it means
.

 ,
, 




{kind=link}
{kind=link}