
High-Precision Methane Emission Quantification Using UAVs and Open-Path Technology
 , and
, and
Abstract

1. Introduction
2. Results and Discussion
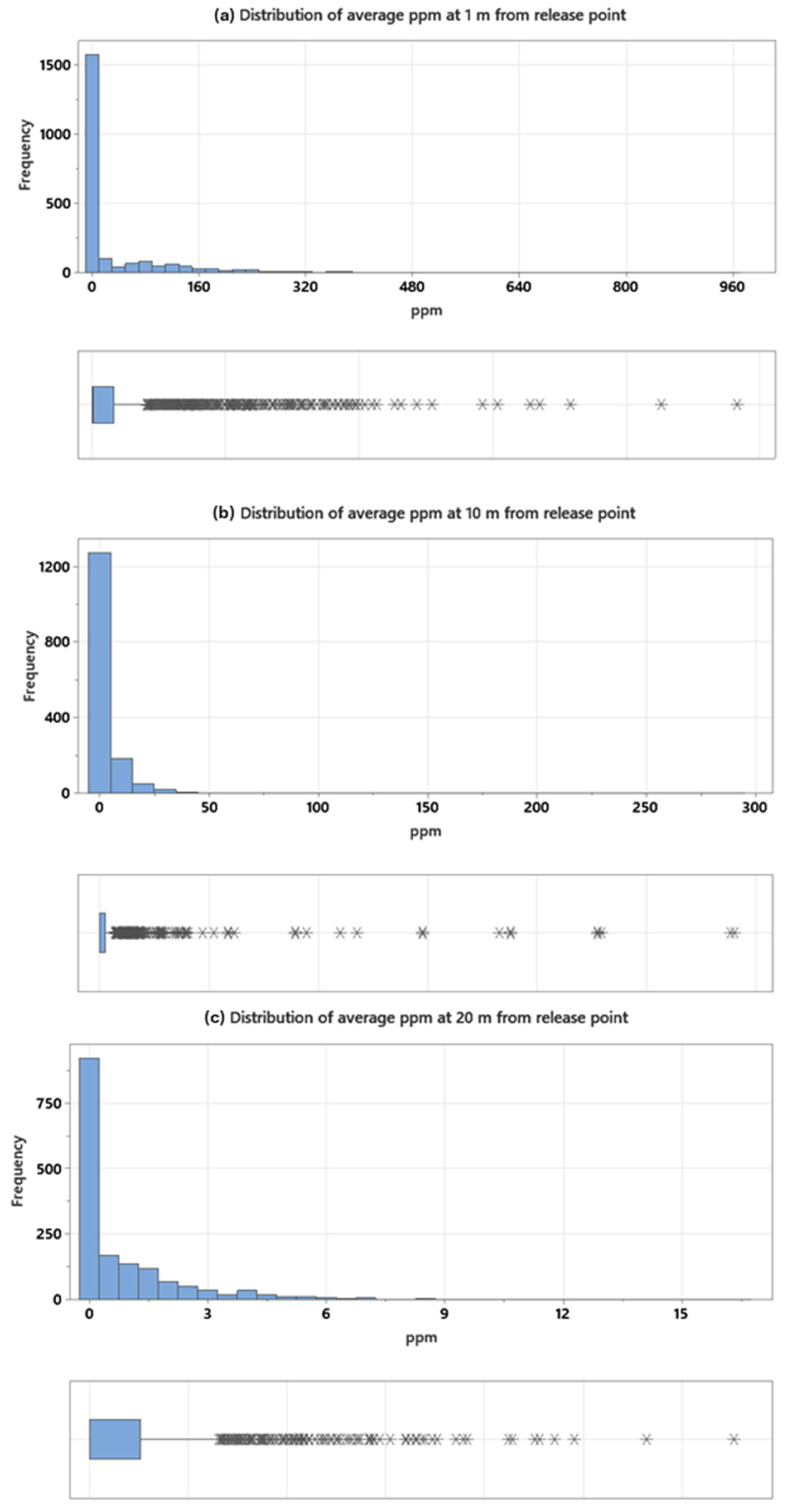
2.1. CH4 Concentration Measurements
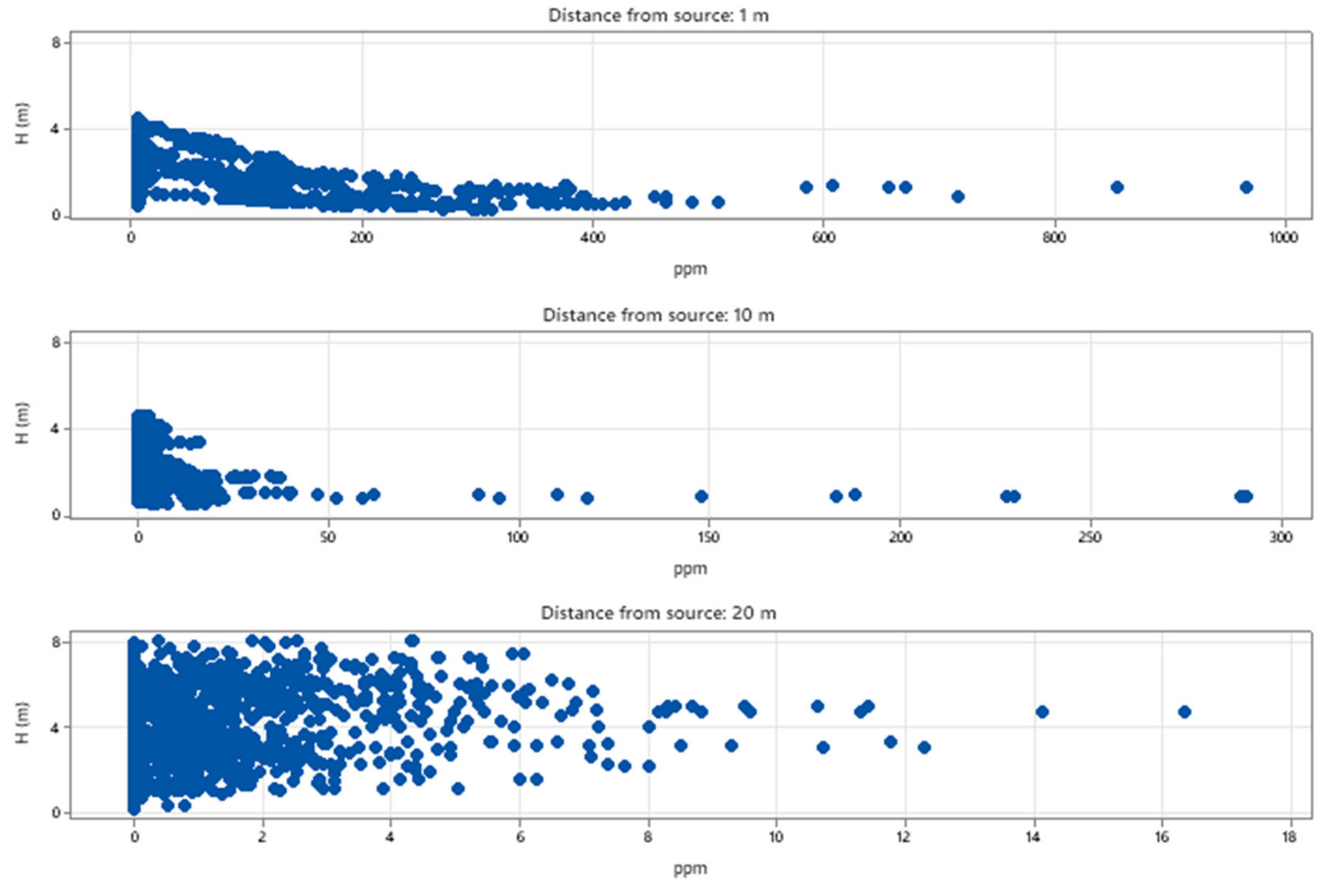
2.2. Vertical Distribution of Average CH4 Concentrations
2.3. Emission Estimates
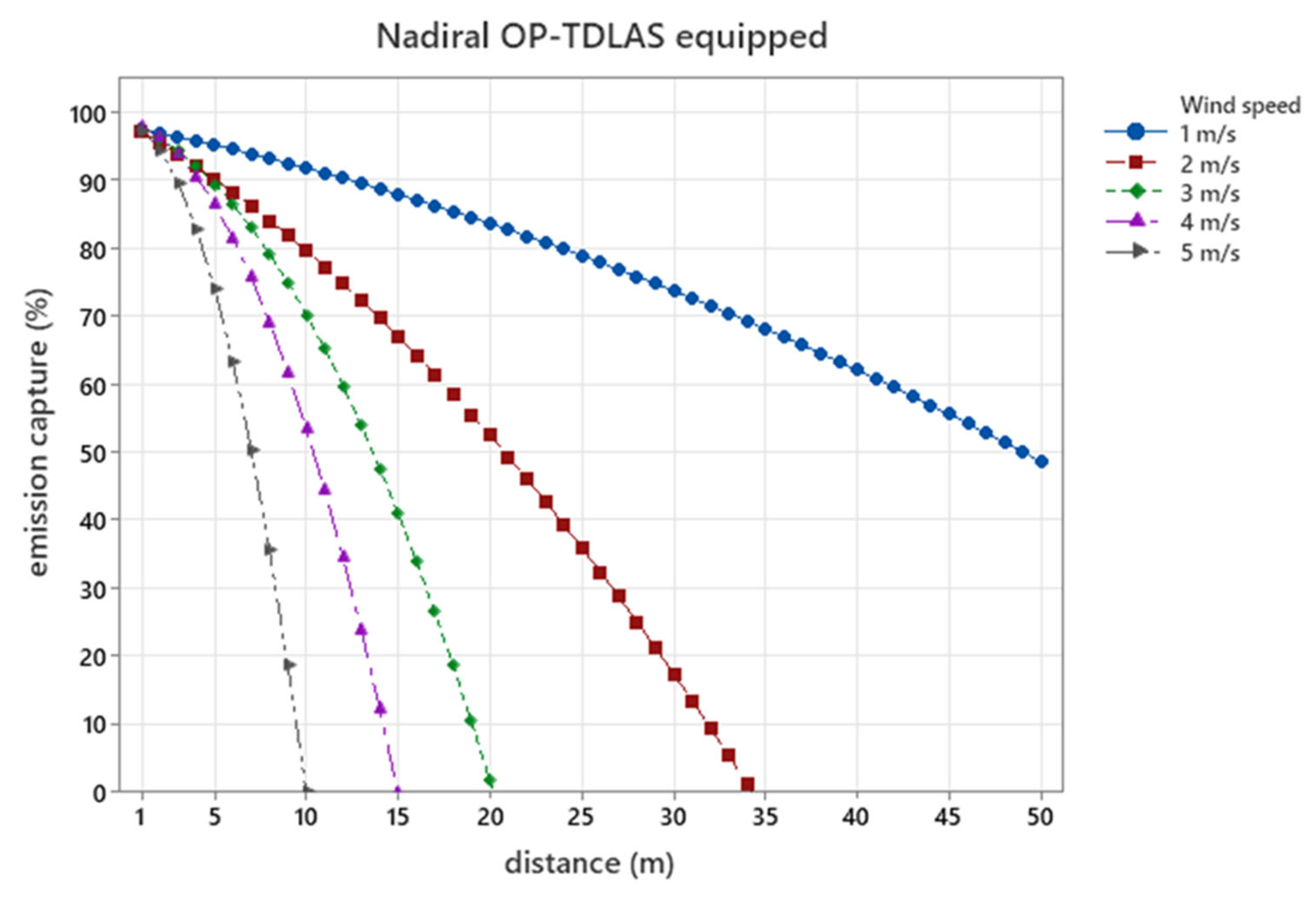
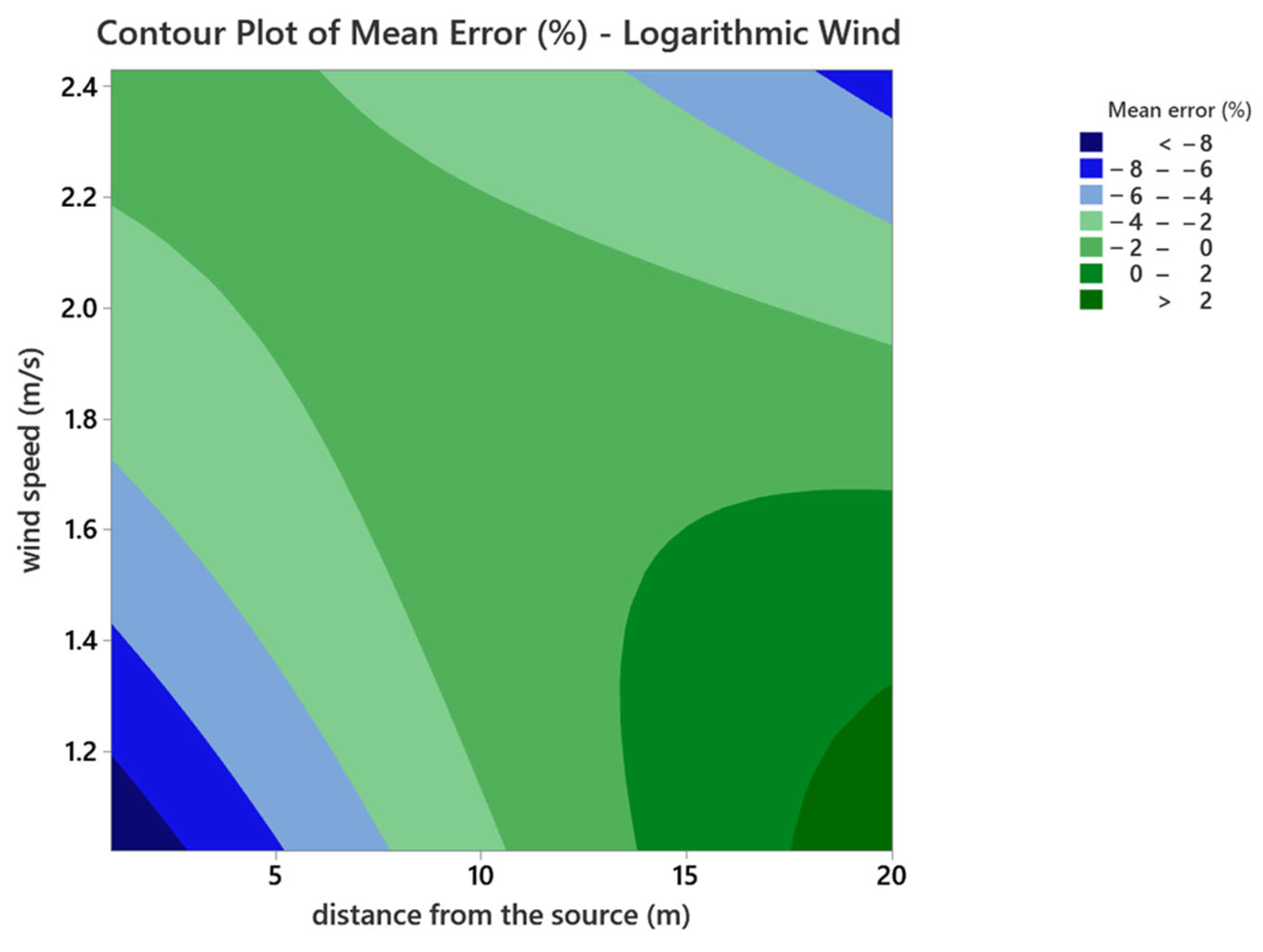
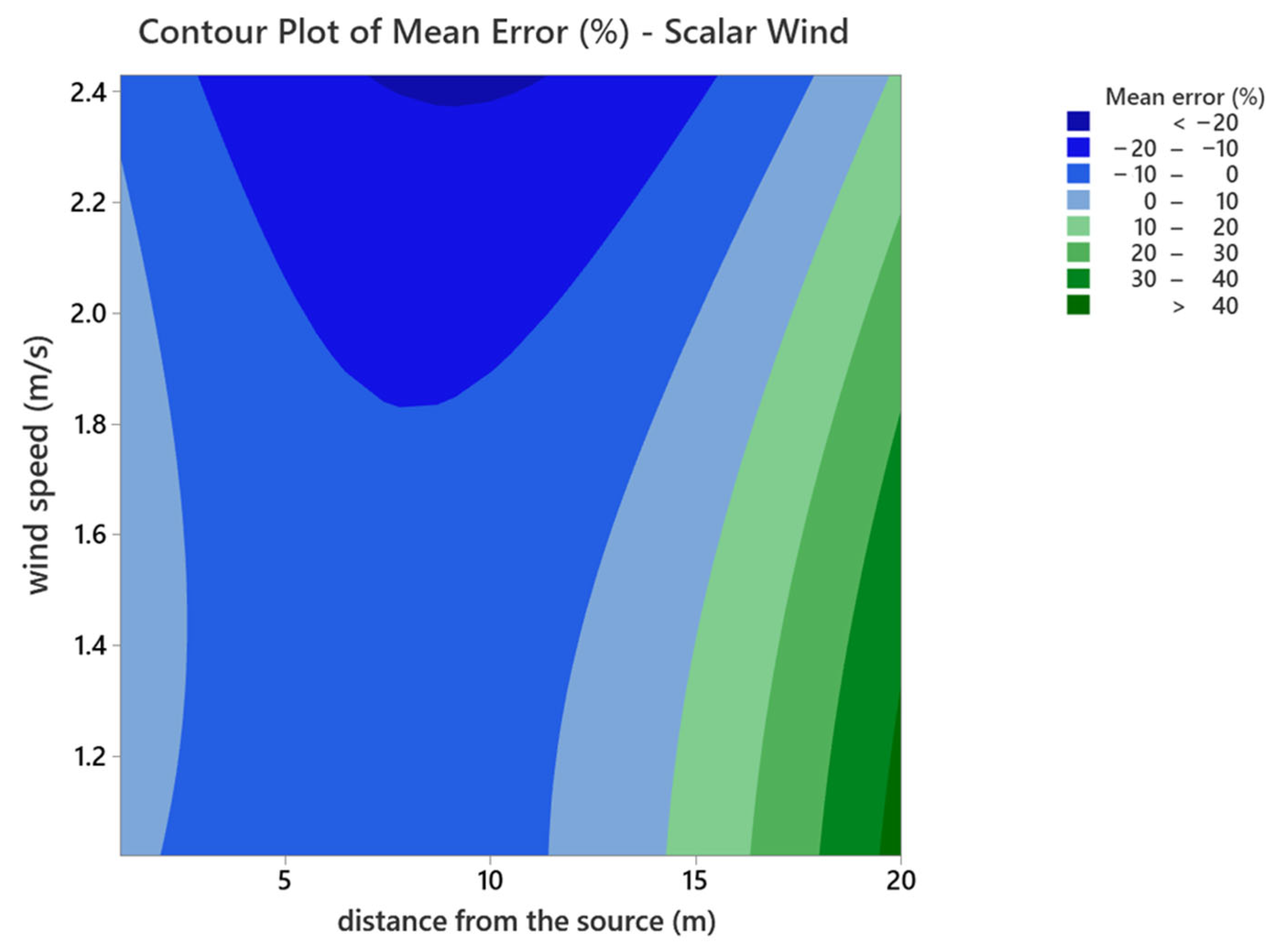
2.4. Optimal Conditions
2.5. Influence of Background Concentration Uncertainty
3. Materials and Methods
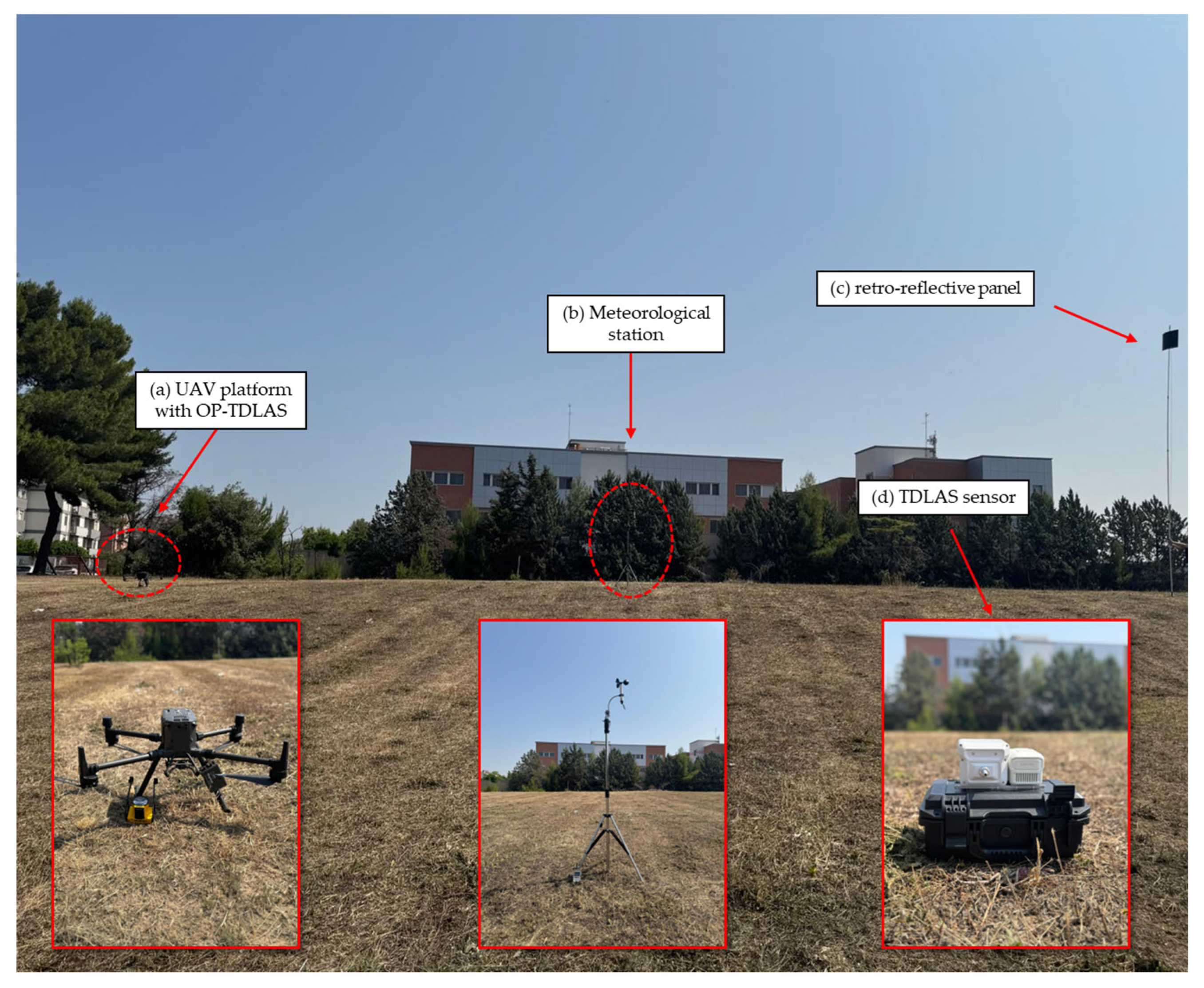
3.1. UAV Platform and Instrumentation
3.2. Mass-Balance Approach
3.2.1. Conversion from ppm-m to Integrated Concentration (g m−2)
3.2.2. CH4 Background Measurements
3.2.3. Wind Measurements
3.3. Controlled Release Test
4. Conclusions
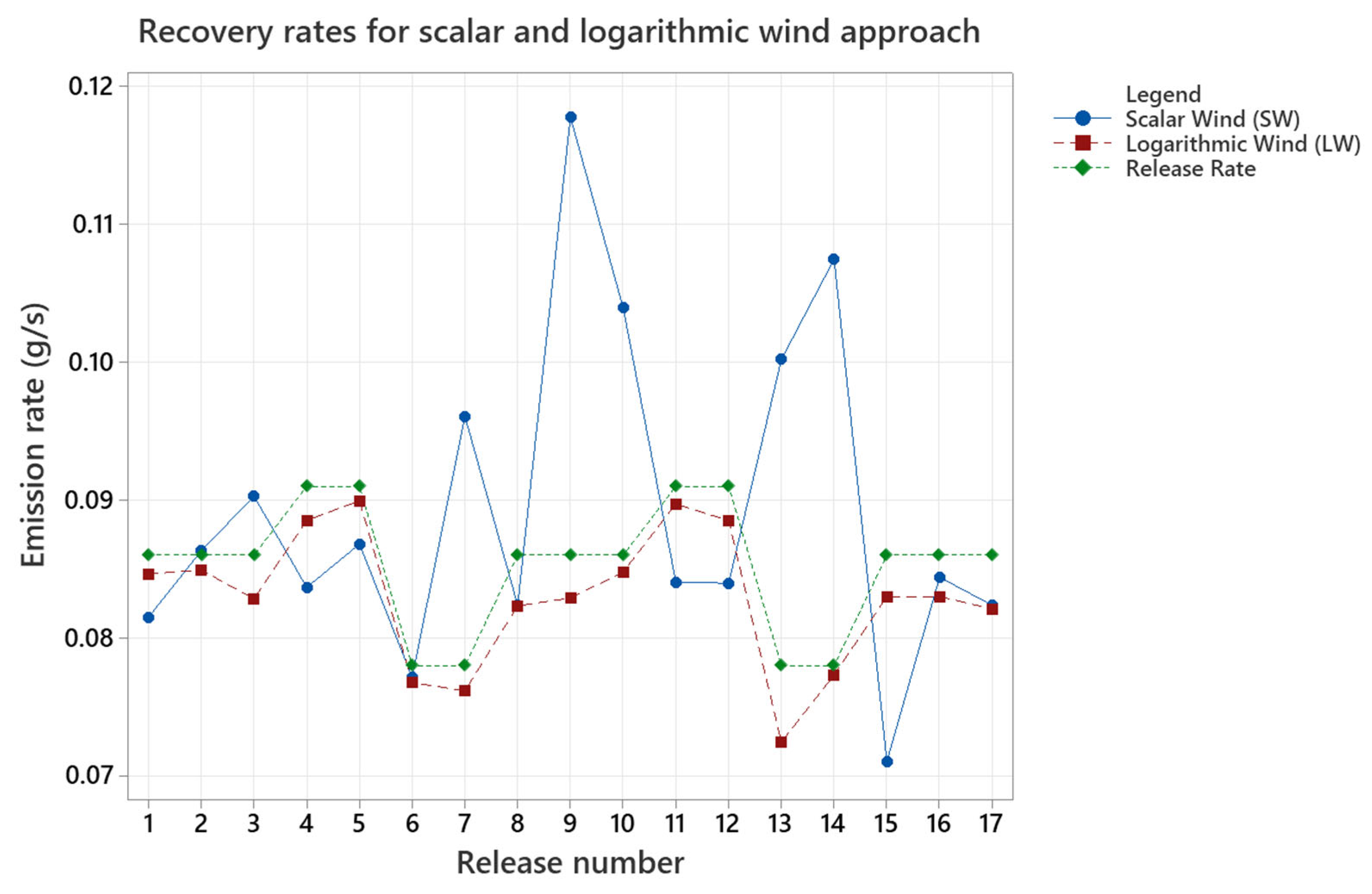
- The recoveries calculated using the LW approach were on average 98%, regardless of the downwind distance from the source;
- The recoveries calculated using the SW approach showed more variable trends with distance, with good correspondence near the source (98%) and marked overestimation at 20 m from the source (120%);
- Experimentally, it was observed that a minimum of four scans was sufficient for the LW approach, while it is recommended to increase this number for the SW approach in order to reduce the plume variability induced by atmospheric turbulence;
- Due to the short time required to perform four scans (about 40 s) and the manoeuvrability of the retroreflector panel, it was easy to ensure the perpendicularity of the plane to the wind during each test. Therefore, wind direction variability was negligible;
- The results were consistent with numerical simulations carried out using a Lagrangian particle model for pollutant dispersion in the atmosphere, considering two different scenarios: one with a horizontal path and the other with a vertical path for the laser sensor.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Johnson, D.; Heltzel, R. Methane emissions measurements of natural gas components using a utility terrain vehicle and portable methane quantification system. Atmos. Environ. 2016, 144, 1–7. [Google Scholar] [CrossRef]
- IEA. World Energy Outlook 2023, IEA, Parigi. 2023. Available online: https://www.iea.org/reports/world-Energy-Outlook-2023 (accessed on 15 March 2025).
- Zavala-Araiza, D.; Herndon, S.C.; Roscioli, J.R.; Yacovitch, T.I.; Johnson, M.R.; Tyner, D.R.; Omara, M.; Knighton, B.; Helmig, D.; Schwietzke, S. Methane emissions from oil and gas production sites in Alberta, Canada. Elem. Sci. Anthr. 2018, 6, 27. [Google Scholar] [CrossRef]
- Chan, E.; Worthy, D.E.J.; Chan, D.; Ishizawa, M.; Moran, M.D.; Delcloo, A.; Vogel, F. Eight-year estimates of methane emissions from oil and gas operations in western Canada are nearly twice those reported in inventories. Environ. Sci. Technol. 2020, 54, 14899–14909. [Google Scholar] [CrossRef] [PubMed]
- Cusworth, D.H.; Bloom, A.A.; Ma, S.; Miller, C.E.; Bowman, K.; Yin, Y.; Maasakkers, J.D.; Zhang, Y.; Scarpelli, T.R.; Qu, Z.; et al. A Bayesian framework for deriving sector-based methane emissions from top-down fluxes. Commun. Earth Environ. 2021, 2, 242. [Google Scholar] [CrossRef]
- MMacKay, K.; Lavoie, M.; Bourlon, E.; Atherton, E.; O’cOnnell, E.; Baillie, J.; Fougère, C.; Risk, D. Methane emissions from upstream oil and gas production in Canada are underestimated. Sci. Rep. 2021, 11, 8041. [Google Scholar] [CrossRef]
- Olczak, M.; Piebalgs, A.; Balcombe, P. A global review of methane policies reveals that only 13% of emissions are covered with unclear effectiveness. One Earth 2023, 6, 519–535. [Google Scholar] [CrossRef]
- Brandt, A.R.; Heath, G.A.; Kort, E.A.; O’Sullivan, F.; Pétron, G.; Jordaan, S.M.; Tans, P.; Wilcox, J.; Gopstein, A.M.; Arent, D.; et al. Methane leaks from North American natural gas systems. Science 2014, 343, 733–735. Available online: https://www.researchgate.net/publication/260211785 (accessed on 15 March 2025).
- Heath, G.; Warner, E.; Steinberg, D.; Brandt, A.R. Estimating U. S. Methane Emissions from the Natural Gas Supply Chain: Approaches, Uncertainties, Current Estimates, and Future Studies; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2015. [Google Scholar]
- Brandt, A.R.; Heath, G.A.; Coole, D. Methane Leaks from Natural Gas Systems Follow Extreme Distributions. Environ. Sci. Technol. 2016, 50, 12512–12520. [Google Scholar] [CrossRef]
- Alvarez, R.A.; Zavala-Araiza, D.; Lyon, D.R.; Allen, D.T.; Barkley, Z.R.; Brandt, A.R.; Davis, K.J.; Scott, C.; Herndon, S.C.; Jacob, D.J.; et al. Assessment of methane emissions from the U.S. oil and gas supply chain. Science 2018, 361, 186–188. Available online: https://www.researchgate.net/publication/325916333_Assessment_of_methane_emissions_from_the_US_oil_and_gas_supply_chain (accessed on 17 March 2025). [CrossRef]
- Zhang, S.; Ma, J.; Zhang, X.; Guo, C. Atmospheric remote sensing for anthropogenic methane emissions: Applications and research opportunities. Sci. Total Environ. 2023, 893, 164701. [Google Scholar] [CrossRef]
- Shaw Jacob, T.; Allen, G.; Pitt, J.; Mead, M.I.; Purvis, R.M.; Dunmore, R.; Wilde, S.; Shah, A.; Barker, P.; Bateson, P.; et al. A baseline of atmospheric greenhouse gases for prospective UK shale gas sites. Sci. Total Environ. 2019, 684, 1–13. [Google Scholar] [CrossRef]
- Knox, S.H.; Jackson, R.B.; Poulter, B.; McNicol, G.; Fluet-Chouinard, E.; Zhang, Z.; Hugelius, G.; Bousquet, P.; Canadell, J.G.; Saunois, M.; et al. FLUXNET-CH4 Synthesis Activity: Objectives, Observations, and Future Directions. Bull. Am. Meteorol. Soc. 2019, 100, 2607–2632. [Google Scholar] [CrossRef]
- Wu, T.; Cheng, J.; Wang, S.; He, H.; Chen, G.; Xu, H.; Wu, S. Hotspot Detection and Estimation of Methane Emissions from Landfill Final Cover. Atmosphere 2023, 14, 1598. [Google Scholar] [CrossRef]
- Gazola, B.; Mariano, E.; Mota Neto, L.V.; Rosolem, C.A. Greenhouse gas and ammonia emissions from a maize-soybean rotation under no-till as affected by intercropping with forage grass and nitrogen fertilization. Agric. For. Meteorol. 2024, 345, 109855. [Google Scholar] [CrossRef]
- Stadler, C.; Fusé, V.S.; Linares, S.; Guzmán, S.A.; Juliarena, M.P. Accessible sampling methodologies to quantify the net methane emission from landfill cells. Atmos. Pollut. Res. 2024, 15, 102011. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, H.; Wu, Y.; Chen, X.; Chen, X.; Zeng, M.; Yang, J.; Su, Y.; Hu, N.; Yang, Z. Classification and concentration prediction of VOCs with high accuracy based on an electronic nose using an ELM-ELM integrated algorithm. IEEE Sens. J. 2022, 22, 14458–14469. [Google Scholar] [CrossRef]
- Wang, T.; Wu, Y.; Ni, W.; Zhu, J.; Zheng, M.; Zeng, M.; Yang, J.; Yang, Z. Multi-Modal and Self-Reconstruction Conditioning Circuit of Semiconductor Gas Sensors. J. Phys. Conf. Ser. 2023, 2500, 012003. [Google Scholar] [CrossRef]
- Wang, T.; Wu, Y.; Zhang, Y.; Lv, W.; Chen, X.; Zeng, M.; Yang, J.; Su, Y.; Hu, N.; Yang, Z. Portable electronic nose system with elastic architecture and fault tolerance based on edge computing, ensemble learning, and sensor swarm. Sens. Actuators B Chem. 2022, 375, 132925. [Google Scholar] [CrossRef]
- Zazzeri, G.; Lowry, D.; Fisher, R.E.; France, J.L.; Lanoisellé, M.; Nisbet, E.G. Plume mapping and isotopic characterisation of anthropogenic methane sources. Atmos. Environ. 2015, 110, 151–162. [Google Scholar] [CrossRef]
- Johnson, M.R.; Tyner, D.R.; Szekeres, A.J. Blinded evaluation of airborne methane source detection using Bridger Photonics LiDAR. Remote Sens. Environ. 2021, 259, 112418. [Google Scholar] [CrossRef]
- Fischer, J.C.; Cooley, D.; Chamberlain, S.; Gaylord, A.; Griebenow, C.J.; Hamburg, S.P.; Salo, J.; Schumacher, R.; Theobald, D.; Ham, J. Rapid, Vehicle-Based Identification of Location and Magnitude of Urban Natural Gas Pipeline Leaks. Environ. Sci. Technol. 2017, 51, 4091–4099. [Google Scholar] [CrossRef]
- Lowry, D.; Fisher, R.E.; France, J.L.; Coleman, M.; Lanoisellé, M.; Zazzeri, G.; Nisbet, E.G.; Shaw Jacob, T.; Allen, G.; Pitt, J.; et al. Environmental baseline monitoring for shale gas development in the UK: Identification and geochemical characterisation of local source emissions of methane to atmosphere. Sci. Total Environ. 2020, 708, 134600. [Google Scholar] [CrossRef] [PubMed]
- Ayasse, A.K.; Thorpe, A.K.; Cusworth, D.H.; Kort, E.A.; Negron, A.G.; Heckler, J.; Asner, G.; Duren, R.M. Methane remote sensing and emission quantification of offshore shallow water oil and gas platforms in the Gulf of Mexico. Environ. Res. Lett. 2022, 17, 084039. [Google Scholar] [CrossRef]
- Wang, M.; Shi, W.; Tang, J. Water property monitoring and assessment for China’s inland Lake Taihu from MODIS-Aqua measurements. Remote Sens. Environ. 2011, 115, 841–854. [Google Scholar] [CrossRef]
- O’Shea, S.J.; Allen, G.; Gallagher, M.W.; Bower, K.; Illingworth, S.M.; Muller, J.B.A.; Jones, B.T.; Percival, C.J.; Bauguitte, S.J.-B.; Cain, M.; et al. Methane and carbon dioxide fluxes and their regional scalability for the European Arctic wetlands during the MAMM project in summer 2012. Atmos. Chem. Phys. 2014, 14, 13159–13174. [Google Scholar] [CrossRef]
- Heimburger, A.M.F.; Harvey, R.M.; Shepson, P.B.; Stirm, B.H.; Gore, C.; Turnbull, J.; Cambaliza, M.O.L.; Salmon, O.E.; Kerlo, A.-E.M.; Lavoie, T.N.; et al. Assessing the optimized precision of the aircraft mass balance method for measurement of urban greenhouse gas emission rates through averaging. Elem. Sci. Anthr. 2017, 5, 26. [Google Scholar] [CrossRef]
- Tong, X.; van Heuven, S.; Scheeren, B.; Kers, B.; Hutjes, R.; Chen, H. Aircraft-Based AirCore Sampling for Estimates of N2O and CH4 Emissions. Environ. Sci. Technol. 2023, 57, 15571–15579. [Google Scholar] [CrossRef] [PubMed]
- Shaw, J.T.; Shah, A.; Han, Y.; Allen, G. Methods for quantifying methane emissions using unmanned aerial vehicles: A review. Philos. Trans. R. Soc. A 2021, 379, 20200450. [Google Scholar] [CrossRef]
- Lavoie, T.N.; Shepson, P.B.; Cambaliza, M.O.L.; Stirm, B.H.; Karion, A.; Sweeney, C.; Yacovitch, T.I.; Herndon, S.C.; Lan, X.; Lyon, D. Aircraft-Based Measurements of Point Source Methane Emissions in the Barnett Shale Basin. Environ. Sci. Technol. 2015, 49, 7904–7913. [Google Scholar] [CrossRef]
- Gao, M.; Xing, Z.; Vollrath, C.; Hugenholtz, C.H.; Barchyn, T.E. Global observational coverage of onshore oil and gas methane sources with TROPOMI. Sci. Rep. 2023, 13, 16759. [Google Scholar] [CrossRef]
- Gasbarra, D.; Toscano, P.; Famulari, D.; Finardi, S.; Di Tommasi, P.; Zaldei, A.; Carlucci, P.; Magliulo, E.; Gioli, B. Locating and quantifying multiple landfills methane emissions using aircraft data. Environ. Pollut. 2019, 254, 112987. [Google Scholar] [CrossRef]
- Kunkel, W.M.; Carre-Burritt, A.E.; Aivazian, G.S.; Snow, N.C.; Harris, J.T.; Mueller, T.S.; Roos, P.A.; Thorpe, M.J. Extension of Methane Emission Rate Distribution for Permian Basin Oil and Gas Production Infrastructure by Aerial LiDAR. Environ. Sci. Technol. 2023, 57, 12234–12241. [Google Scholar] [CrossRef]
- Gaudioso, D. Le Emissioni di Metano in Italia—Stime di Emissione e Priorità di Intervento per la Loro Riduzione—Giugno 2022. 2022. Available online: https://www.wwf.it/uploads/report-metano-WWF-A4-web-1.pdf (accessed on 17 March 2025).
- Fosco, D.; De Molfetta, M.; Renzulli, P.; Notarnicola, B. Progress in monitoring methane emissions from landfills using drones: An overview of the last ten years. Sci. Total Environ. 2024, 945, 173981. [Google Scholar] [CrossRef] [PubMed]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Vinković, K.; Andersen, T.; de Vries, M.; Bert Kers, B.; van Heuven, S.; Peters, W.; Hensen, A.; van den Bulk, P.; Chen, H. Evaluating the use of an Unmanned Aerial Vehicle (UAV)-based active AirCore system to quantify methane emissions from dairy cows. Sci. Total Environ. 2022, 831, 154898. [Google Scholar] [CrossRef]
- Andersen, T.; Vinkovic, K.; de Vries, M.; Kers, B.; Necki, J.; Swolkien, J.; Roiger, A.; Peters, W.; Chen, H. Quantifying methane emissions from coal mining ventilation shafts using an unmanned aerial vehicle (UAV)-based active AirCore system. Atmos. Environ. X 2021, 12, 100135. [Google Scholar] [CrossRef]
- Andersen, T.; Zhao, Z.; de Vries, M.; Necki, J.; Swolkien, J.; Menoud, M.; Röckmann, T.; Roiger, A.; Fix, A.; Peters, W.; et al. Local-to-regional methane emissions from the Upper Silesian Coal Basin (USCB) quantified using UAV-based atmospheric measurements, Atmos. Chem. Phys. 2023, 23, 5191–5216. [Google Scholar] [CrossRef]
- Allen, G.; Williams, P.; Ricketts, H.; Shah, A.; Hollingsworth, P.; Kabbabe, K.; Helmore, J.; Finlayson, A.; Robinson, R.; Rees-White, T.; et al. Validation of Landfill Methane Measurements from an Unmanned Aerial System; Project SC 160006; Environment Agency: Bristol, UK, 2018. Available online: https://assets.publishing.service.gov.uk/government/uploads/system/uploads/attachment_data/file/684501/Validation_of_landfill_methane_measurements_from_an_unmanned_aerial_system_-_report.pdf (accessed on 22 March 2025).
- Ali, N.B.H.; Abichou, T.; Green, R. Comparing estimates of fugitive landfill methane emissions using inverse plume modeling obtained with Surface Emission Monitoring (SEM), Drone Emission Monitoring (DEM), and Downwind Plume Emission Monitoring (DWPEM). J. Air Waste Manag. Assoc. 2020, 70, 410–424. [Google Scholar] [CrossRef]
- Yong, H.; Allen, G.; Mcquilkin, J.; Ricketts, H.; Shaw, J.T. Lessons learned from a UAV survey and methane emissions calculation at a UK landfill. Waste Manag. 2024, 180, 47–54. [Google Scholar] [CrossRef]
- Yang, S.; Talbot, R.W.; Frish, M.B.; Golston, L.M.; Aubut, N.F.; Zondlo, M.A.; Gretencord, C.; McSpiritt, J. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Measurement System Description and Mass Balance Approach. Atmosphere 2018, 9, 383. [Google Scholar] [CrossRef]
- Golston, L.M.; Aubut, N.F.; Frish, M.B.; Yang, S.; Talbot, R.W.; Gretencord, C.; McSpiritt, J.; Zondlo, M.A. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Localization and Quantification of Emission Rate. Atmosphere 2018, 9, 333. [Google Scholar] [CrossRef]
- Desjardins, R.; Denmead, O.; Harper, L.; McBain, M.; Massé, D.; Kaharabata, S. Evaluation of a micrometeorological mass balance method employing an open-path laser for measuring methane emissions. Atmos. Environ. 2004, 38, 6855–6866. [Google Scholar] [CrossRef]
- Allen, G.; Hollingsworth, P.; Kabbabe, K.; Pitt, J.R.; Mead, M.I.; Illingworth, S.; Roberts, G.; Bourn, M.; Shallcross, D.E.; Percival, C.J. The development and trial of an unmanned aerial system for the measurement of methane flux from landfill and greenhouse gas emission hotspots. Waste Manag. 2019, 87, 883–892. [Google Scholar] [CrossRef]
- Gålfalk, M.; Nilsson Påledal, S.; Bastviken, D. Sensitive Drone Mapping of Methane Emissions without the Need for Supplementary Ground-Based Measurements. ACS Earth Space Chem. 2021, 5, 2668–2676. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.M.; Park, M.H.; Jeong, S.; Lee, K.H.; Kim, J.Y. Evaluation of error inducing factors in unmanned aerial vehicle mounted detector to measure fugitive methane from solid waste landfill. Waste Manag. 2021, 124, 368–376. [Google Scholar] [CrossRef]
- Cossel, K.C.; Waxman, E.M.; Hoenig, E.; Hesselius, D.; Chaote, C.; Coddington, I.; Newbury, N.R. Ground-to-UAV, laser-based emissions quantification of methane and acetylene at long standoff distances. Atmos. Meas. Tech. 2023, 16, 5697–5707. [Google Scholar] [CrossRef]
- Soskind, M.G.; Li, N.P.; Moore, D.P.; Chen, Y.; Wendt, L.P.; McSpiritt, J.; Zondlo, M.A.; Wysocki, G. Stationary and drone-assisted methane plume localization with dispersion spectroscopy. Remote Sens. Environ. 2023, 289, 113513. [Google Scholar] [CrossRef]
- Corbett, A.; Smith, B. A Study of a Miniature TDLAS System Onboard Two Unmanned Aircraft to Independently Quantify Methane Emissions from Oil and Gas Production Assets and Other Industrial Emitters. Atmosphere 2022, 13, 804. [Google Scholar] [CrossRef]
- Shokri, A. Application of Sono–photo-Fenton process for degradation of phenol derivatives in petrochemical wastewater using full factorial design of experiment. Int. J. Ind. Chem. 2018, 9, 295–303. [Google Scholar] [CrossRef]
- Baştürk, E.; Alver, A. Modeling azo dye removal by sono-fenton processes using response surface methodology and artificial neural network approaches. J. Environ. Manag. 2019, 248, 109300. [Google Scholar] [CrossRef]
- Cai, Q.Q.; Lee, B.C.Y.; Ong, S.L.; Hu, J.Y. Application of a Multiobjective Artificial Neural Network (ANN) in Industrial Reverse Osmosis Concentrate Treatment with a Fluidized Bed Fenton Process: Performance Prediction and Process Optimization. ACS EST Water 2021, 1, 847–858. [Google Scholar] [CrossRef]
- Morales, R.; Ravelid, J.; Vinkovic, K.; Korbeń, P.; Tuzson, B.; Emmenegger, L.; Chen, H.; Schmidt, M.; Humbel, S.; Brunner, D. Controlled-release experiment to investigate uncertainties in UAV-based emission quantification for methane point sources. Atmos. Meas. Tech. 2022, 15, 2177–2198. [Google Scholar] [CrossRef]
- De Molfetta, M.; Fosco, D.; Renzulli, P.A.; Notarnicola, B. Identification and treatment of false methane values produced by the TDLAS technology equipped on UAVs. Integr. Environ. Assess. Manag. 2025, Special Series, vjae043. [Google Scholar] [CrossRef]
- Abichou, T.; Ali, N.B.H.; Amankwah, S.; Green, R.; Howarth, E.S. Using Ground- and Drone-Based Surface Emission Monitoring (SEM) Data to Locate and Infer Landfill Methane Emissions. Methane 2023, 2, 440–451. [Google Scholar] [CrossRef]
- Fosco, D.; Molfetta, M.D.; Renzulli, P.; Notarnicola, B.; Carella, C.; Fedele, G. Innovative drone-based methodology for quantifying methane emissions from landfills. Waste Manag. 2025, 195, 79–91. [Google Scholar] [CrossRef] [PubMed]
- Abichou, T.; Clark, J.; Chanton, J. Reporting central tendencies of chamber measured surface emission and oxidation. Waste Manag. 2011, 31, 1002–1008. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Number Test | Downwind Distance [m] | Release Rate [g s−1] | LW Approach [g s−1] | SW Approach [g s−1] | LW | SW |
|---|---|---|---|---|---|---|---|
| Mean Absolute Error | Mean Absolute Error | ||||||
| 15 January 2024 | 1 | 1 | 0.086 ± 0.006 | 0.085 ± 0.004 | 0.082 ± 0.002 | 3.6% | 5.2% |
| 2 | 1 | 0.086 ± 0.007 | 0.085 ± 0.002 | 0.086 ± 0.003 | 2.1% | 2.3% | |
| 3 | 1 | 0.086 ± 0.009 | 0.083 ± 0.002 | 0.090 ± 0.002 | 3.8% | 5.1% | |
| 4 | 10 | 0.091 ± 0.009 | 0.089 ± 0.006 | 0.084 ± 0.004 | 6.0% | 8.4% | |
| 5 | 10 | 0.091 ± 0.008 | 0.090 ± 0.007 | 0.087 ± 0.004 | 5.5% | 5.3% | |
| 6 | 20 | 0.078 ± 0.007 | 0.077 ± 0.012 | 0.077 ± 0.006 | 6.8% | 5.4% | |
| 7 | 20 | 0.078 ± 0.006 | 0.076 ± 0.010 | 0.096 ± 0.007 | 10.3% | 23.2% | |
| 16 January 2024 | 8 | 1 | 0.086 ± 0.007 | 0.082 ± 0.002 | 0.082 ± 0.003 | 4.5% | 4.6% |
| 9 | 1 | 0.086 ± 0.009 | 0.083 ± 0.002 | 0.118 ± 0.004 | 3.6% | 36.9% | |
| 10 | 1 | 0.086 ± 0.007 | 0.085 ± 0.003 | 0.104 ± 0.003 | 1.9% | 20.8% | |
| 11 | 10 | 0.091 ± 0.008 | 0.090 ± 0.004 | 0.084 ± 0.004 | 3.2% | 8.0% | |
| 12 | 10 | 0.091 ± 0.007 | 0.089 ± 0.007 | 0.084 ± 0.005 | 4.0% | 8.0% | |
| 13 | 20 | 0.078 ± 0.007 | 0.072 ± 0.005 | 0.100 ± 0.006 | 8.9% | 28.4% | |
| 14 | 20 | 0.078 ± 0.007 | 0.077 ± 0.002 | 0.107 ± 0.008 | 5.5% | 37.8% | |
| 17 January 2024 | 15 | 1 | 0.086 ± 0.008 | 0.083 ± 0.002 | 0.071 ± 0.002 | 3.6% | 17.4% |
| 16 | 1 | 0.086 ± 0.008 | 0.083 ± 0.001 | 0.084 ± 0.002 | 3.5% | 2.4% | |
| 17 | 1 | 0.086 ± 0.006 | 0.082 ± 0.002 | 0.082 ± 0.003 | 4.5% | 4.4% |
| Number Test | LW Approach | SW Approach | ||
|---|---|---|---|---|
| [g s−1] | [%] | [g s−1] | [%] | |
| 1 | 0.085 | 15.30% | 0.082 | 18.90% |
| 2 | 0.085 | 16.20% | 0.086 | 15.50% |
| 3 | 0.083 | 17.50% | 0.09 | 12.50% |
| 4 | 0.089 | 14.00% | 0.084 | 16.40% |
| 5 | 0.09 | 13.20% | 0.087 | 14.30% |
| 6 | 0.077 | 22.80% | 0.077 | 23% |
| 7 | 0.076 | 23.70% | 0.096 | 12% |
| 8 | 0.082 | 18.10% | 0.082 | 19.60% |
| 9 | 0.083 | 17.10% | 0.118 | 12.10% |
| 10 | 0.085 | 15.90% | 0.104 | 12.60% |
| 11 | 0.09 | 12.70% | 0.084 | 17% |
| 12 | 0.089 | 13.80% | 0.084 | 15.80% |
| 13 | 0.072 | 29.50% | 0.1 | 12.90% |
| 14 | 0.077 | 22.20% | 0.107 | 12.30% |
| 15 | 0.083 | 16.70% | 0.071 | 32% |
| 16 | 0.085 | 15.30% | 0.084 | 16.90% |
| 17 | 0.085 | 16.20% | 0.082 | 19.20% |
| Date | Number Test | Time (Take Off—Landing) | Downwind Distance [m] | Release Rate [g s−1] | Mean Wind Speed [m s−1] | Mean Wind Direction [deg Nord] | Angle Between Wind and Plane [deg Nord] |
|---|---|---|---|---|---|---|---|
| 15 January 2024 | 1 | 11:28:05–11:28:54 | 1 | 0.086 ± 0.006 | 2.32 ± 0.34 | 266 ± 20 | 82 ± 20 |
| 2 | 11:35:03–11:35:52 | 1 | 0.086 ± 0.007 | 2.41 ± 0.30 | 294 ± 28 | 84 ± 28 | |
| 3 | 11:42:22–11:43:12 | 1 | 0.086 ± 0.009 | 2.02 ± 0.32 | 313 ± 18 | 84 ± 18 | |
| 4 | 12:00:05–12:00:52 | 10 | 0.091 ± 0.009 | 1.33 ± 0.15 | 311 ± 16 | 87 ± 16 | |
| 5 | 12:06:26–12:07:07 | 10 | 0.091 ± 0.008 | 1.77 ± 0.25 | 288 ± 25 | 96 ± 25 | |
| 6 | 12:20:03–12:20:54 | 20 | 0.078 ± 0.007 | 2.42 ± 0.62 | 302 ± 20 | 98 ± 20 | |
| 7 | 12:26:01–12:26:51 | 20 | 0.078 ± 0.006 | 2.43 ± 0.77 | 299 ± 26 | 101 ± 30 | |
| 16 January 2024 | 8 | 15:24:16–15:25:01 | 1 | 0.086 ± 0.007 | 1.64 ± 0.30 | 302 ± 27 | 81 ± 27 |
| 9 | 15:31:01–15:31:53 | 1 | 0.086 ± 0.009 | 1.97 ± 0.51 | 288 ± 31 | 101 ± 25 | |
| 10 | 15:39:12–15:40:00 | 1 | 0.086 ± 0.007 | 1.33 ± 0.18 | 143 ± 21 | 104 ± 21 | |
| 11 | 15:47:01–15:47:52 | 10 | 0.091 ± 0.008 | 1.28 ± 0.08 | 283 ± 18 | 86 ± 21 | |
| 12 | 15:52:25–15:53:04 | 10 | 0.091 ± 0.007 | 1.49 ± 0.21 | 247 ± 15 | 92 ± 23 | |
| 13 | 15:57:12–15:58:01 | 20 | 0.078 ± 0.007 | 1.96 ± 0.27 | 304 ± 25 | 91 ± 25 | |
| 14 | 16:05:42–16:06:33 | 20 | 0.078 ± 0.007 | 1.46 ± 0.25 | 259 ± 23 | 103 ± 42 | |
| 17 January 2024 | 15 | 10:19:18–10:20:02 | 1 | 0.086 ± 0.008 | 1.91 ± 0.11 | 96 ± 18 | 88 ± 18 |
| 16 | 10:30:02–10:30:52 | 1 | 0.086 ± 0.008 | 1.77 ± 0.07 | 64 ± 12 | 85 ± 12 | |
| 17 | 10:35:27–10:36:03 | 1 | 0.086 ± 0.006 | 1.93 ± 0.05 | 92 ± 16 | 102 ± 16 | |
| 18 * | 10:45:01–10:45:47 | 1 | 0.086 ± 0.009 | 1.02 ± 0.08 | 69 ± 21 | 82 ± 19 | |
| 19 * | 11:02:07–11:02:56 | 10 | 0.091 ± 0.007 | 0.97 ± 0.10 | 299 ± 23 | 86 ± 23 | |
| 20 * | 11:09:03–11:09:49 | 10 | 0.091 ± 0.008 | 1.02 ± 0.18 | 280 ± 16 | 86 ± 21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fosco, D.; De Molfetta, M.; Renzulli, P.A.; Notarnicola, B.; Astuto, F. High-Precision Methane Emission Quantification Using UAVs and Open-Path Technology. Methane 2025, 4, 15. https://doi.org/10.3390/methane4030015
Fosco D, De Molfetta M, Renzulli PA, Notarnicola B, Astuto F. High-Precision Methane Emission Quantification Using UAVs and Open-Path Technology. Methane. 2025; 4(3):15. https://doi.org/10.3390/methane4030015
Chicago/Turabian StyleFosco, Donatello, Maurizio De Molfetta, Pietro Alexander Renzulli, Bruno Notarnicola, and Francesco Astuto. 2025. "High-Precision Methane Emission Quantification Using UAVs and Open-Path Technology" Methane 4, no. 3: 15. https://doi.org/10.3390/methane4030015
APA StyleFosco, D., De Molfetta, M., Renzulli, P. A., Notarnicola, B., & Astuto, F. (2025). High-Precision Methane Emission Quantification Using UAVs and Open-Path Technology. Methane, 4(3), 15. https://doi.org/10.3390/methane4030015