
Innovative Ways of Developing and Using Specific Purpose Alternatives for Solving Hard Combinatorial Network Routing and Ordered Optimisation Problems

Abstract
1. Introduction
- (1)
- The minimum travelling salesman tour, which is in the ‘NP Hard’ category, is solved as an index-restricted minimum connected graph;
- (2)
- The path passing through a set of specified nodes, which is computationally demanding due to the path being constrained to pass through a set of specified nodes, is also solved as an index-restricted minimum connected graph;
- (3)
- The second-best optimal solution for the shortest route and the assignment problem.
2. Modification of a Classical Shortest Connected Network Problem and Its Applications
2.1. Modification of the Shortest Connect Network (SCN)
2.1.1. Statement of the Modified Shortest Connected Network
2.1.2. Some Essential Terms and a Theorem to Modify the SCN Obtained by the Greedy Approach to an Index-Restricted SCN (IRSCN)
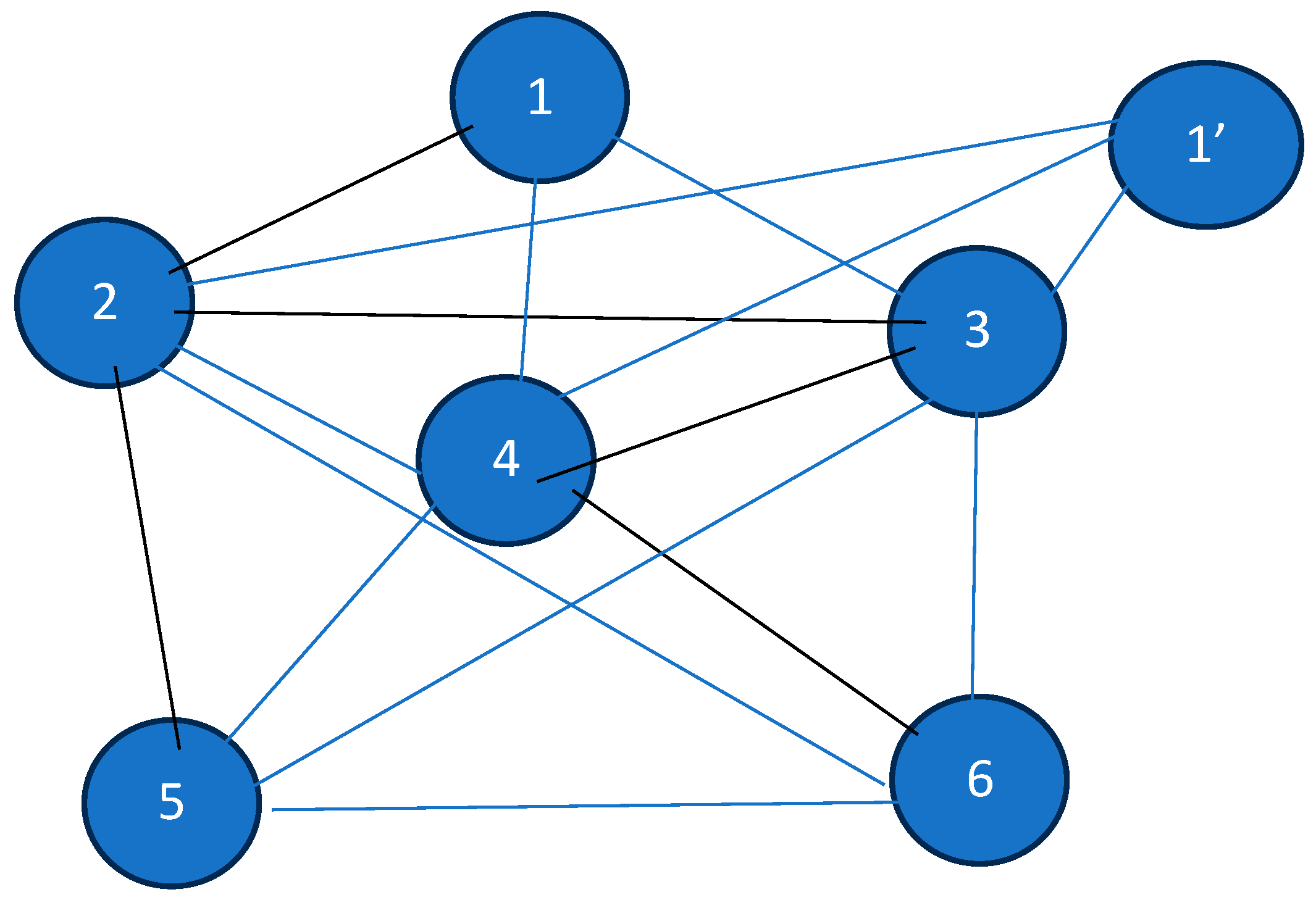
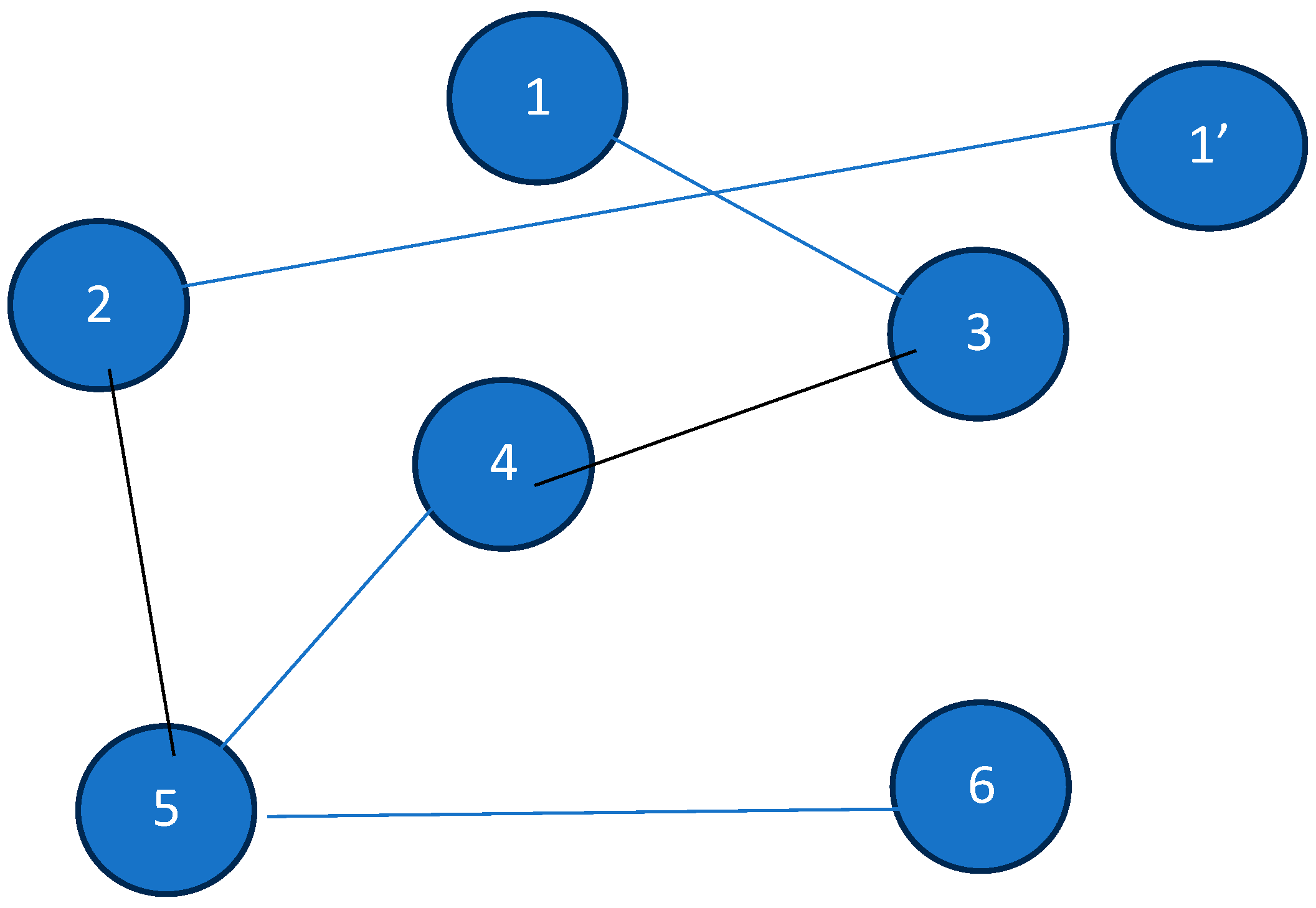
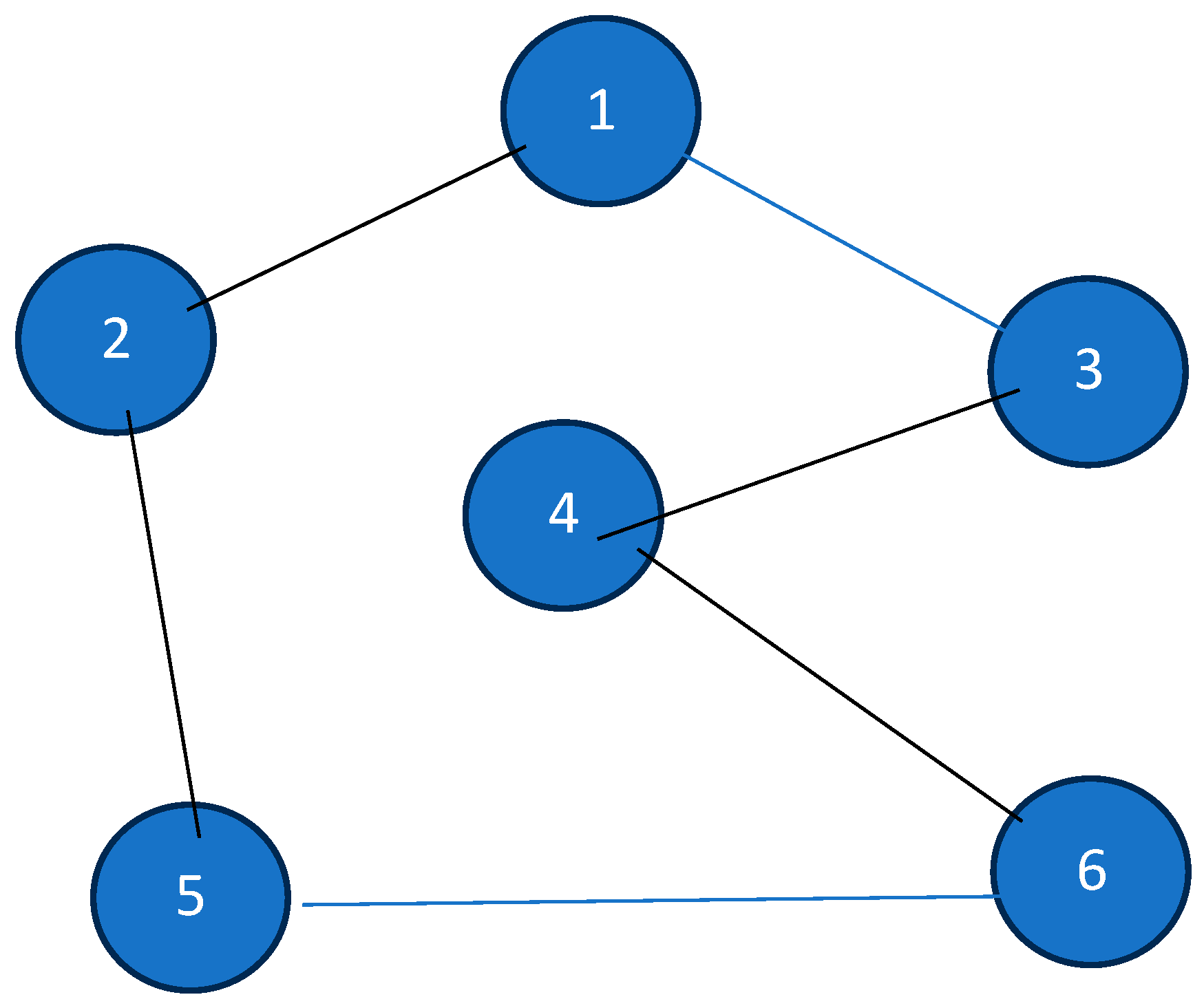
2.1.3. Numerical Illustration
3. The Index-Restricted SCN and Its Applications
3.1. The Travelling Salesman Problem
3.1.1. A Minimum Spanning Tree-Based Approach to Find the Minimum Travelling Salesman Tour (MTST) of the Network : Approach 1 (Complexity )
3.1.2. A Minimum Spanning Tree-Based Approach to Find the Minimum Travelling Salesman Tour (MTST) of : Approach 2 (Complexity
3.1.3. A Minimum Spanning Tree-Based Approach to Establish That the Minimum Salesman Tour Is Equivalent to Index-Restricted Minimum Spanning Tree: Approach 3 (Complexity 1)
Modified Network and Steps for Obtaining the Minimum Spanning Tree of
- Step 1: For the given network , develop the network and arrange links in increasing order. Initially, all links are non-basic, so all duplicate links will be the same as in . Links that have been duplicated are called Type 2 links and those which have not been duplicated are called Type 1 links. The number of Type 1 links is and that of Type 2 is 2 . Type 2 links are such that at least two links have the same length value, initially.
- Step 2: Set a counter K = 1. Select the link of minimum length, include it in the minimum spanning tree, and go to Step 3.
- Step 3: If the selected link is Type 1 and K < n, set K = K + 1, and select the next minimum length. If K = n, go to Step 7.
- Step 4: If the selected edge was Type 2 and K < n, first, set the length of the duplicate link equal to and then rearrange lengths in increasing order. Set K = K + 1 and select the next minimum. If K = n, go to Step 7.
- Step 5: If the selected link forms a cycle with the spanning tree formed so far, discard it, or else include it. If this last link was Type 1, return to Step 3. If the selected link was Type 2, go to Step 6.
- Step 6: For the selected edge, check the following:
- 6.1: If the inclusion of the edge does not lead to an isolated node in the network, discard it.
- 6.2: If alternatives exist, go in favour of the edge that develops better balance among the index of nodes forming the minimum spanning tree.
- Step 7: Stop as the minimum spanning tree has been obtained.
Numerical Illustration
3.2. Shortest Path in a Non-Directed Network under the Condition of Passing through K Specified Nodes
4. Ordered Optimum
4.1. The 2nd-Best Route for the Conventional Routing Problem in a Directed Network
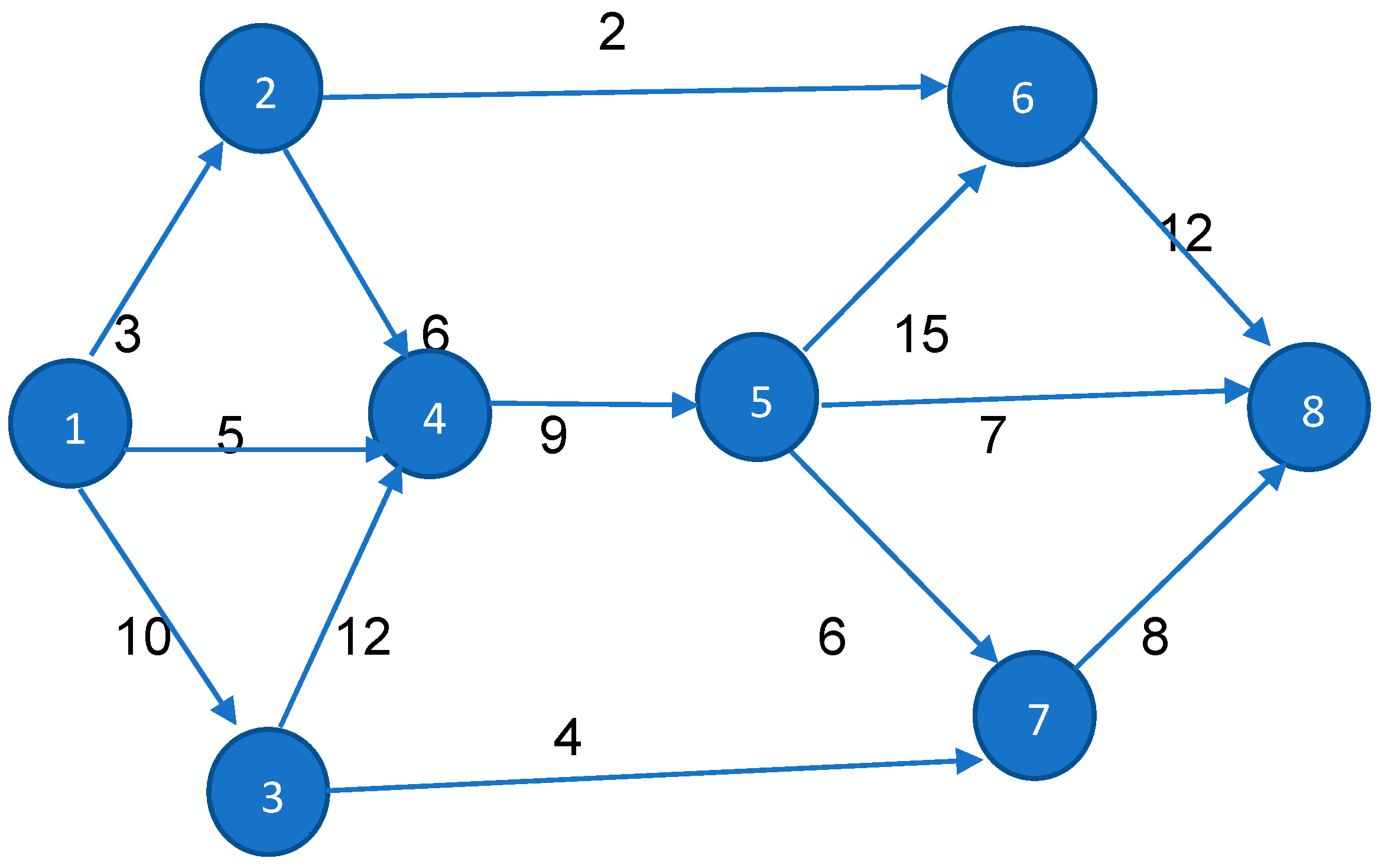
Numerical Illustration to Find the 2nd-Best Shortest Route
4.2. Numerical Illustration for the 2nd-Best Solution to an Assignment Problem
5. Concluding Remarks
- Is the minimum travelling salesman tour problem really NP Hard?
- Is the constrained routing problem computationally demanding?
- Ordered optimisations require further investigation to find the best when for the two cases discussed in this paper, and for other situations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nemhauser, G.; Wolsey, L.A. Integer and Combinatorial Optimization; John Wiley & Sons: Hoboken, NJ, USA, 1988. [Google Scholar] [CrossRef]
- Kumar, S.; Wagner, D. Some algorithms for solving extreme point mathematical programming problem. N. Z. Oper. Res. J. 1979, 7, 128–149. [Google Scholar]
- Murty, K.G. An algorithm for ranking all the assignments in order of increasing cost. Oper. Res. 1968, 16, 682–687. [Google Scholar] [CrossRef]
- Bellman, R.; Dreyfus, S. Applied Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1962. [Google Scholar]
- Hastings, N.J. Dynamic Programming with Management Applications; OR Series; American Mathematical Society: Butterworth, Malaysia; London, UK, 1973. [Google Scholar]
- Saksena, J.P. Dynamic Programming; Siddarth Publications: Delhi, India, 2006. [Google Scholar]
- Golden, B.; Raghavan, S.; Wasil, E. The Vehicle Routing Problem: Latest Advances and New Challenges; Springer Science + Business Media: Berlin/Heidelberg, Germany, 2008; ISBN 978-0-087-77777-1. [Google Scholar] [CrossRef]
- Marrekchi, E.; Besbes, W.; Dhouib, D.; Demir, E. A review of recent advances in Operations Research Literature on the green routing problems and its variations. Ann. Oper. Res. 2021, 304, 529–574. [Google Scholar] [CrossRef]
- Anupam, G. Deterministic MST, Advanced Algorithms, CMU. Available online: http://www.cs.cmu.edu/~anupamg/advalgos15/lectures/lecture01.pdf (accessed on 1 April 2024).
- Kruskal, J.B. On the shortest spanning subtree of a graph and the traveling salesman problem. Proc. Am. Math. Soc. 1956, 7, 48–50. [Google Scholar] [CrossRef]
- Prim, R. Shortest connected network and some generalizations. Bell Syst. Tech. J. 1957, 36, 1389–1401. [Google Scholar]
- Munapo, E.; Kumar, S.; Lesaoana, M.; Nyamugure, P. A minimum spanning tree with index <=2. Aust. Soc. Oper. Res. Bull. 2016, 34, 1–14. [Google Scholar]
- Hoffman, K.L.; Pedberg, M.; Rinaldi, G. The Travelling Salesman Problem; Kluer Academic Publishers: Amsterdam, The Nertherlands, 2001. [Google Scholar] [CrossRef]
- Korte, B.; Vygen, J. Combinatorial Optimization: Theory and Applications; Chapter 21; Springer: Berlin/Heidelberg, Germany, 2006; pp. 501–535. [Google Scholar]
- Laporte, G. The travelling salesman problem: An overview of exact and approximate algorithms. Eur. J. Oper. Res. 1992, 59, 231–247. [Google Scholar] [CrossRef]
- Kumar, S.; Munapo, E.; Lesaoana, M.; Nyamugure, P. Is the Travelling Salesman Problem Actually NP Hard? Chapter 3 in Engineering and Technology: Recent Innovations and Research; Mathani, A., Ed.; International Research Publication House: Delhi, India, 2017; pp. 37–58. ISBN 978-93-86138-06-4. [Google Scholar]
- Kumar, S.; Munapo, E.; Lesaoana, M.; Nyamugure, P. A minimum spanning tree based approach to the travelling salesman problem. Opsearch 2018, 55, 150–164. [Google Scholar]
- Kumar, S.; Munapo, E.; Siguake, C.; Al-Rabeeah, M. The minimum spanning tree with node index <=2 is equivalent to the minimum travelling salesman tour. In Mathematics in Engineering Sciences: Novel Theories, Technologies and Applications; Chapter 8; Mathematical Engineering, Manufacturing, and Management Sciences Series; Ram, M., Ed.; CRC Press: Boca Raton, FL, USA, 2020; Available online: https://www.crcpress.com/Mathematical-Engineering-Manufacturing-and-Management-Sciences/book-series/CRCMEMMS (accessed on 1 April 2024).
- Kalaba, R. On some communication combinatorial network analysis. Proc. Symp. Appl. Math. 1960, 10. [Google Scholar] [CrossRef]
- Saksena, J.P.; Kumar, S. The routing problem with K specified nodes. Oper. Res. 1966, 14, 909–913. [Google Scholar] [CrossRef]
- Kumar, S.; Munapo, E.; Nyamugure, P.; Tawanda, T. Path through K specified links: A heuristic using the minimum spanning tree approach. Graph. Era Univ. J. 2023, 11, 221–238. [Google Scholar]
- Kumar, S.; Munapo, E.; Jones, B.C. An integer equation controlled descending path to a pure integer program. Indian J. Math. 2007, 49, 211–237. [Google Scholar]
- Munapo, E.; Jones, B.C.; Kumar, S. A minimum weight label method and its application to CPM Network. ORiON S. Afr. J. Oper. Res. 2008, 24, 37–48. [Google Scholar] [CrossRef]
- Kumar, S.; Munapo, E.; Ncube, O.; Sigauke, C. A minimum weight labelling method for determination of the shortest path in a non-directed network. Int. J. Syst. Assur. Eng. Manag. 2013, 4, 13–18. [Google Scholar]
- Karimi-Managham, M.; Mohammadi, M.; Meyer, A.M.; Karimi-Managham, E.; Talbi, G. Machine learning at the service of meta-heuristics for solving combinatorial optimization problems: A state-of-the-art. Eur. J. Oper. Res. 2022, 296, 393–422. [Google Scholar] [CrossRef]
- Labidi, H.; Azzouna, N.; Hassine, K.; Goudir, M.S. An improved genetic algorithm for solving multi-objective vehicle routing problem with environmental considerations. Procedia Comput. Sci. 2023, 225, 3866–3875. [Google Scholar] [CrossRef]
- Sabeenian, R.S.; Kumar, V.; Ravi, G.; Pudasaini, A. An Application for Load Sharing in Trucks. Int. J. Recent Technol. Eng. (IJRTE) 2019, 8, 3203–3207. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i\j | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 1 | - | 1 | 1 | 1 | 1 | 1 |
| 2 | 1 | - | 2 | 2 | 2 | 2 |
| 3 | 1 | 2 | - | 3 | 3 | 3 |
| 4 | 1 | 2 | 3 | - | 4 | 4 |
| 5 | 1 | 2 | 3 | 4 | - | 5 |
| 6 | 1 | 2 | 3 | 4 | 5 | - |
| Nodes | 1 | 2 | 3 | 4 | 5 | 6 |
| Incidence | 5 | 1 | 1 | 1 | 1 | 1 |
| F\T | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 1 | - | 12 | 10 | 10 | - | - |
| 2 | 12 | - | 15 | 11 | 11 | 16 |
| 3 | 10 | 15 | - | 7 | 14 | 12 |
| 4 | 10 | 11 | 7 | - | 10 | 11 |
| 5 | - | 11 | 14 | 10 | - | 9 |
| 6 | - | 16 | 12 | 11 | 9 | - |
| Node | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| Label | (1,0) | (1,3) | (1,10) | (1,5) | (4,14) | (2,5) | (3,14) | (6,17) |
| R\C | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 1 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| 7 | 51 | 52 | 87 | 38 | 60 | 74 | 66 | 0 | 20 | |
| 2 | 50 | 12 | 0 | 64 | 8 | 53 | 0 | 46 | 76 | 42 |
| 3 | 27 | 77 | 0 | 18 | 22 | 48 | 44 | 13 | 0 | 57 |
| 4 | 62 | 0 | 3 | 8 | 5 | 6 | 14 | 0 | 26 | 39 |
| 5 | 0 | 97 | 0 | 5 | 13 | 0 | 41 | 31 | 62 | 48 |
| 6 | 79 | 68 | 0 | 0 | 15 | 12 | 17 | 47 | 35 | 43 |
| 7 | 76 | 99 | 48 | 27 | 34 | 0 | 0 | 0 | 28 | 0 |
| 8 | 0 | 20 | 9 | 27 | 46 | 15 | 84 | 19 | 3 | 24 |
| 9 | 56 | 10 | 45 | 39 | 0 | 93 | 67 | 79 | 19 | 24 |
| 10 | 27 | 0 | 39 | 53 | 46 | 24 | 69 | 46 | 23 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, S.; Munapo, E. Innovative Ways of Developing and Using Specific Purpose Alternatives for Solving Hard Combinatorial Network Routing and Ordered Optimisation Problems. AppliedMath 2024, 4, 791-805. https://doi.org/10.3390/appliedmath4020042
Kumar S, Munapo E. Innovative Ways of Developing and Using Specific Purpose Alternatives for Solving Hard Combinatorial Network Routing and Ordered Optimisation Problems. AppliedMath. 2024; 4(2):791-805. https://doi.org/10.3390/appliedmath4020042
Chicago/Turabian StyleKumar, Santosh, and Elias Munapo. 2024. "Innovative Ways of Developing and Using Specific Purpose Alternatives for Solving Hard Combinatorial Network Routing and Ordered Optimisation Problems" AppliedMath 4, no. 2: 791-805. https://doi.org/10.3390/appliedmath4020042
APA StyleKumar, S., & Munapo, E. (2024). Innovative Ways of Developing and Using Specific Purpose Alternatives for Solving Hard Combinatorial Network Routing and Ordered Optimisation Problems. AppliedMath, 4(2), 791-805. https://doi.org/10.3390/appliedmath4020042