1. Introduction
Recently, at Itaewon in South Korea, a crowd crush accident occurred on 29 October 2022. This is a kind of crowing safety problem. Mathematics is contributed to analyze the data and to avoid the crowd crush accidents. In this paper, I suggest a mathematical methodology to help avoid these accidents. In real time, one can gather the position data of cell phones or head count data through CCTV. Monitoring centers have dependent variables—the longitude and latitude—and an independent variable—time t. These data are from the signals of satellites. Several local governments, agencies and organizations can gather crowd Geographic Information Systems (crowdGIS) data for public safety.
I suggest a real-time-dependent model using these data. With the longitude data and latitude data, the model is a two-dimensional space problem. If one adds the elevation data, then the model becomes a three-dimensional space problem. In the relative work, I extend this to N-dimensions in the optimization problem using the Kim method [
1]. In this two-dimensional monitoring model, the measurement of optimization of these data has the key role in the performance of the methodology to monitor the risk of crowd crush accidents. Here, this paper focuses on the two-dimensional space problem. In the measurement of optimization, I describe either the minimax problem or minsum problem [
2]. Here, the focus is on the minimax problem. The
constrained optimization problem is then formulated as an
unconstrained minimax problem of finding
such that
In big data, one can extend the suggested problems with artificial intelligence, machine learning or deep learning. This is future research work.
The organization of the paper is as follows.
Section 1 presents the introduction, background, problem statement and research contribution. The algorithm and the optimization methodology to solve the problem are described in
Section 2 where I prove that the algorithm finds an exact minimax solution. The optimization methodology is verified. Then, in
Section 3, the numerical results are presented, and the methodology is validated. The conclusions are given in
Section 4.
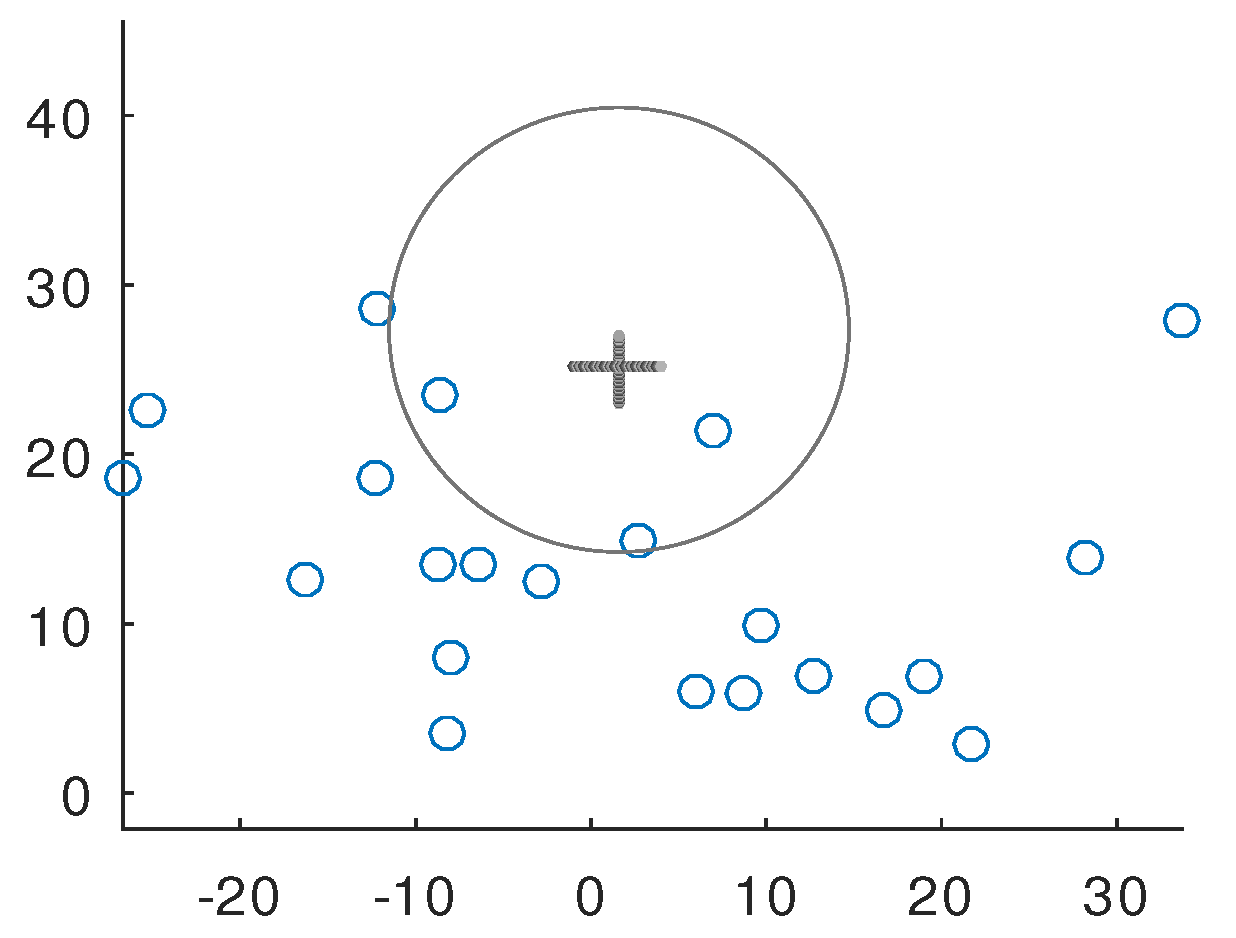
We need to denote the position as the position of the cellphone in two-dimensional with the independent variable time t. First, we fix the time t for convenience and later, we extend to continuous models with time t. After we set the problem, to find the solution, we need the following constraint: Two fixed points, and , are needed to begin the problem with the time t.
See
Figure 1 for the suggested problem setting in the two-dimensional case. Here, the closeness of a circle to a set of points is given by the weighted maximum distance from the circle to the points. Denote, by
, the center of a circle that passes through the two points
and
, and, by
, the
n-dimensional vector
where
and the weight
Set the objective function , where denotes the -norm for
A class of similar problems to (
1) has a long history of development in operation research. This goes back to Pierre de Fermat who considered the case of
,
and
with equal weights whose solution is called the
Fermat point. Consider the case of
, for a general
n and
with equal weights. Then, the problem is to find the geometric median of the set of points
which is a standard problem in facility location to minimize the cost of transportation.
The minimizer
of
is known as the Fermat–Weber [
3] point or 1-median. The Fermat–Weber problem has drawn attention from mathematicians and facility location scientists and engineers; see, for instance [
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16], and the references therein. For the Euclidean metric
only, see the references [
8,
9,
10,
11,
12,
14,
15,
16,
17] and for the rectilinear (Manhattan) metric
and Euclidean metric, see the references [
6,
13]. For a survey paper on the Fermat–Weber problem, see Wesolowsky [
18,
19,
20,
21].
The case of
with equal weights without the constraint on the circle passing through any point was covered by Drezner [
17] for
and
∞, and the case with equal and unequal weights was addressed by Brimberg et al. [
22] for
Nonlinear minimax problems with successive approximation methods for finding a stationary point were also studied by Demjanov [
23].
The suggested optimized optimization method (Kim method) in a two-dimensional case can be applied to the detection of a circle on the image [
24]. The sphere-detection method (the Kim method in three-dimensions) can be applied to a three-dimensional image with depth.
This method is effective for big-data optimization problems of machine-learning models and algorithms [
1,
25]. The comparison study is shown in an N-dimensional research paper [
1]. In a general N-dimensional model, the Kim method was verified and validated [
1].
2. Optimization Methodology
The minimax crowd crush location optimization models are set up mathematically in this section. Let the cell phone location be with time t.
We suppose that two additional points and are given, which are distinct from Likewise, we set and .
As described in the beginning of the section, this paper is restricted to the optimization model of finding a circle that passes through two given points. I propose a systematic approach to resolve this minimax model, thereby, obtaining an exact solution algorithm that is fast. The organization of the paper is as follows. The models are described in
Section 2. I prove that the model methodology searches for an exact minimax solution. Then, in
Section 3, the numerical results are presented. The conclusions are given in
Section 4.
Since the circles are constrained to pass
and
, the centers should lie on the straight line which bisects the line segment
perpendicularly. To simplify the problem let us translate and rotate
,
and
so that the locations of
and
are
and
where
is the distance between
and
. Furthermore, denote the coordinate of
by
. Since the center of the circle lies on the
y-axis, Problem (
1) is then reduced to a one-dimensional problem. Denoting by
the coordinate of
, the radius of the circle, which passes through
and
is
.
For
let
denote the weighted distance
, where
Since
Problem (
1) can be rewritten as finding
such that
Lemma 1. Suppose that there does not exist a circle that passes through , and the data points . A local optimum to the minimax problem is then taken at the intersection point of the graphs of and for some and . In the general dimensional case, see the reference [1]. Proof. Assume that the function has a local minimum at a point , which is not an intersection point of any two graphs of and for any and . Since the graph of is a finite number of piecewise smooth curves, there should exist some i and a sufficiently small positive such that on where is a critical point of and thus it is a critical point of thereon.
Such critical points should be either the zeros of the first derivative of
or the zero of
. Thus, the exact critical point
of the function
should be either
or
which are zeros of
or
, respectively. In order to derive a contradiction from the existence of such critical points, notice that the second derivative of
is given as follows:
I treat the two cases separately.
- (i)
First, let us consider the points
. Observe that
This means that if is greater (or less) than zero, then is less (or greater) than zero, and thus the function has a local maximum (or local minimum) at . Since , it follows that the function has a local maximum at .
- (ii)
Next, consider the point Since the function has a local minimum at and on , it is trivial that .
Both cases (i) and (ii) lead to a contradiction to the assumption. Therefore, the local minimum of must be taken at a point , which is an intersection point of two graphs of and for some and . This completes the proof. □
The local minima of are taken at the intersection points of and .
Theorem 2. Let ’s be all the intersection points of the graphs of and for all Let be such that If , then is a global minimum for Problem (2); otherwise, Problem (2) does not have a global minimum solution. In the general dimensional case, see the reference [1]. Proof. Let us begin with finding the candidates of global minimum of
using the above Lemma 1. Since the equation
is equivalent to the equation
, one can find the intersection points of
and
by solving
Equation (
3) is divided into
or
.
To solve the equation
, move the radical term
to the right side of the equation and square both sides. Then, we find
To isolate the radical expression to the left side, move all the other terms to the right and square both sides of the equation again. Then, one gets the following cubic polynomial:
where
Similarly, solving the equation
is equivalent to solving the following cubic polynomial:
where
By using Cardano’s formula, one can find all the real roots of
and
. In this way, one can find all the intersection points of
and
for
Then, by comparing the values of the function
at these points, one can find the candidate of global minimum at
. As the function
is defined on
, the global minimum may not exist. However, using the expression
we have
as
. Thus, if
, then
is a global minimum. If
, then the function
does not have global minimum. This completes the proof. □
Summarizing the above procedure in the proof of Theorem 2, we propose the following algorithm for solving the minimax problem (
2):
- Step1.
Compute the distance between and ; choose the coordinates system such that and ; by a rigid-motion transform to associate all the coordinates for ;
- Step2.
If , and are on one specific circle, then it is done.
- Step3.
Find all the intersection points ’s of the graphs and for all
- Step4.
For all such the intersection points ’s, evaluate for all ; then compute ; and find the minimum .
- Step5.
If , then is the global minimum. If , the global minimum of the function does not exist.
3. Numerical Results
I developed a minimax circle to monitor the crowd crush risk by using the position of a cell phone with time
t. I show several test cases with 20 data of cell phone position including the weight
. See the
Table 1,
Table 2 and
Table 3. The Table shows the detailed input data with the weights (the weights are 1).
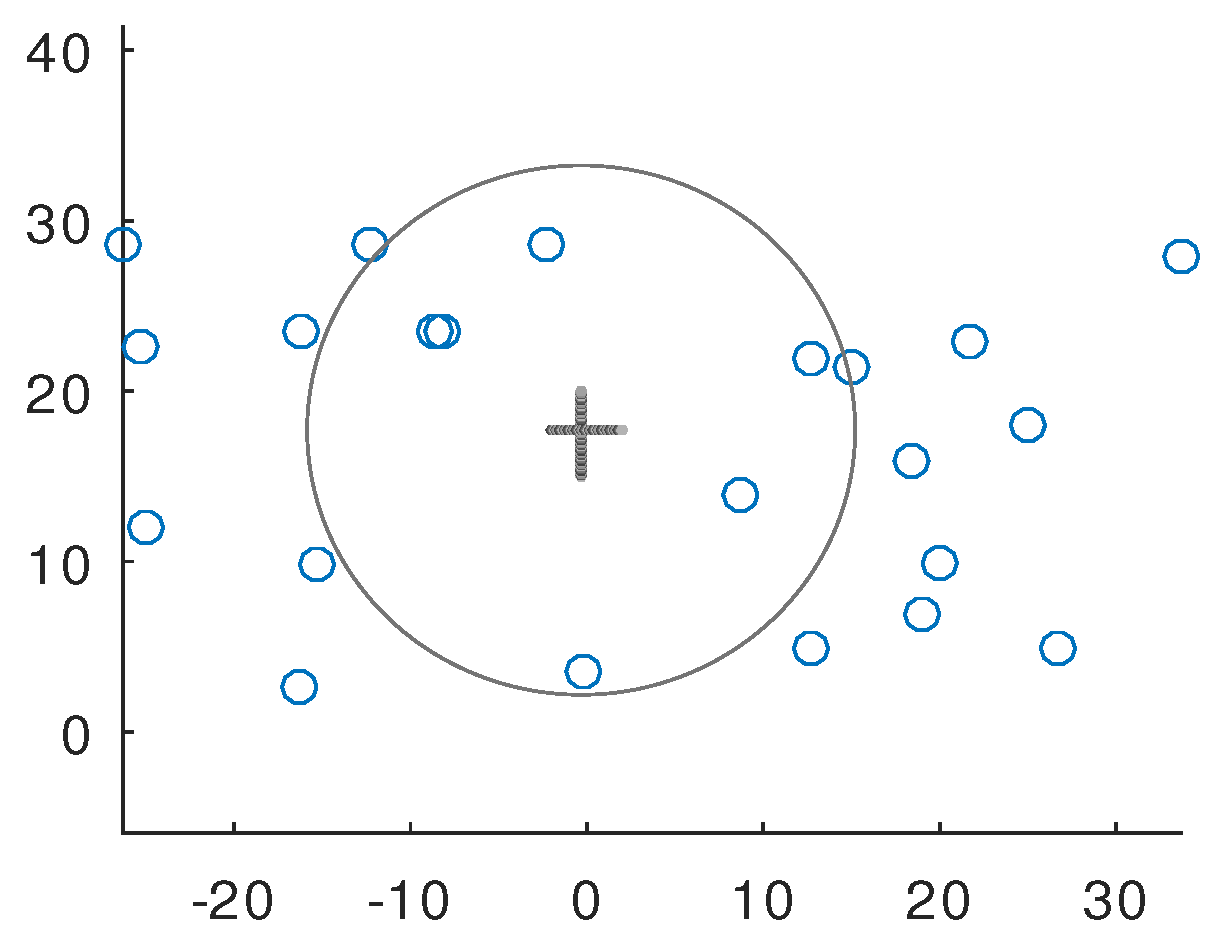
is the numerical solution from the exact solution procedure of the suggested models. I tested many times for various random input data and the results are satisfactory. The computation is executed using the fortran compiler in a window system with the architecture Intel Pentium CPU 4405U of 2.10 GHz. See
Figure 2 for the validation. The verification was proved in
Section 2. See
Figure 3,
Figure 4 and
Figure 5 for the fixed single time
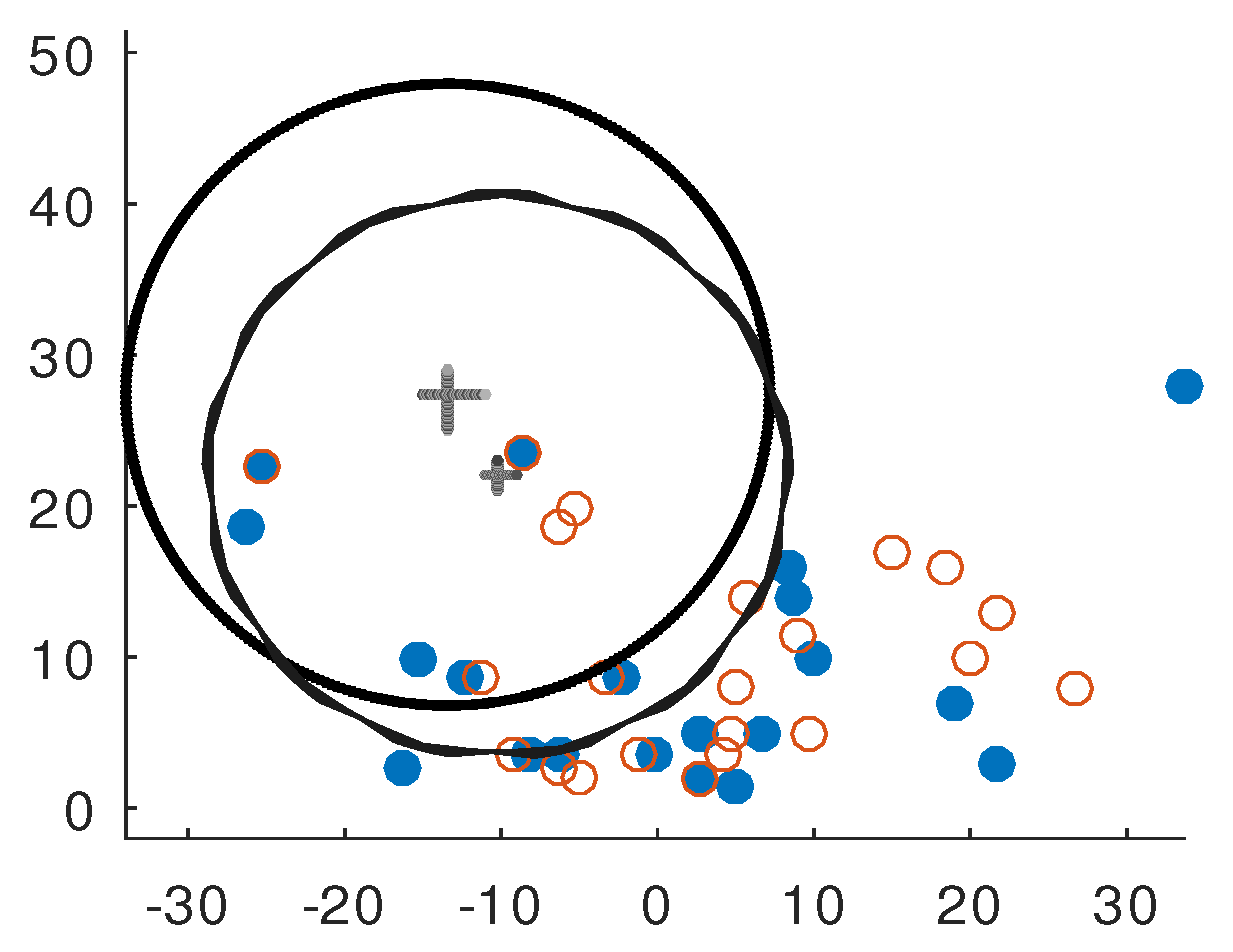
t.
Figure 6 and
Figure 7 were shown for the multiperiod.
Generally, in N-dimensional, I performed the comparison study with the suggested methodology and other methodology of the data [
1,
26]. See the
Table 4 with a comparison study of several methodology with the random data set from [
26]. AUC is the area under the curve. The method result of AUC (KIM) has
in
Table 4 because the two distinct circles are not overlapped. DT is the decision tree method.
is the k-nearest neighbor method.
is the logistic regression method. NB is the Naive Bayes method. C4.5 is a decision tree with divide-and-conquer. SVM is the support vector machine method. LC is the linear classifier method [
26]. The methodology is to find the mathematical exact solution. I find the two distinct circle with centers and radii.
4. Conclusions
This paper proposed an optimized monitoring methodology to avoid crowd crush accidents with scattered data by searching the global minimum of the minimax data or minsum data with the independent variable time
t. These scattered data are the position data of cell phones with time
t. Mathematically, I found an exact solution of the optimized monitoring region with the suggested methodology using the Kim method [
1].
This paper investigated the suggested minimax problem with the suggested optimization method (the Kim method). This problem was applied to analyze monitoring to avoid crowd crush accidents. Here, I also considered the general weighted case. The weighted value can be considered as the historical value of the risk of the crowd crush possibility. Furthermore, I obtained the exact solution of the minimizing circle to avoid the risk of crowd crush accidents by maximizing the distance between the circle through two fixed points and multiple points. By finding the local optima, one finds the global optimum.
After verifying and validating the exact solution of monitoring with the suggested monitoring problem, an efficient algorithm was proposed. The advantage of this methodology is to theoretically find the exact solution. Thus, one can save on computation time by using the exact formula to find the coefficients of the equations. This is the optimization method of 2D scattered cell phone position data. This contributes to the analysis of monitoring for crowd crush accidents.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}