
Maximum Entropy Solutions with Hyperbolic Cosine and Secant Distributions: Theory and Applications



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
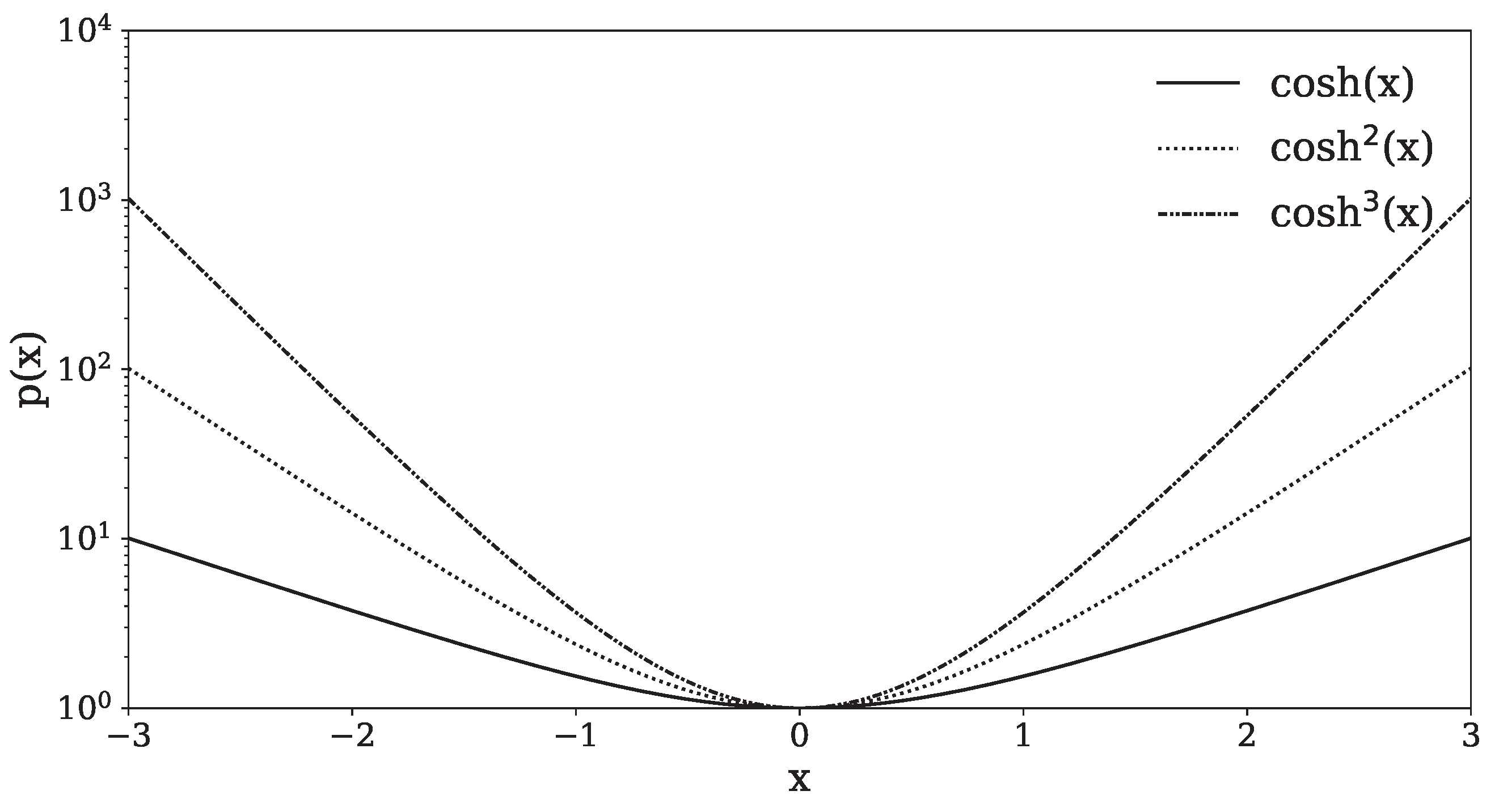
2. Properties of the Hyperbolic Cosine Probability Function
3. The Maximum Entropy Principle
4. Derivation of the Hyperbolic Cosine Probability Distribution Function from the Maximum Entropy Principle
5. Applications of the Maximum Entropy Technique with Hyperbolic Cosine and Secant Distributions
5.1. Catenary
5.2. Repulsive Oscillator
5.3. Advection Equation
5.4. Non-Linear Schrödinger Equation
5.5. Non-Linear Diffusion
5.6. Korteweg–de Vries Equation
6. Discussion and Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sahin, E.; Ozdogan, T.; Orbay, M. On the effectiveness of exponential type orbitals with hyperbolic cosine functions in atomic calculations. J. Math. Chem. 2017, 55, 1849–1856. [Google Scholar] [CrossRef]
- Kouamé, D.; Biard, M.; Girault, J.; Bleuzen, A.; Tranquart, F.; Patat, F. Statistical and Neuro-fuzzy approaches for emboli detection. In Proceedings of the 2004 12th European Signal Processing Conference, Vienna, Austria, 6–10 September.
- Barndorff-Nielsen, O. Hyperbolic Distributions and Distributions on Hyperbolae. Scand. J. Stat. 1978, 5, 151–157. [Google Scholar]
- Andrich, D.; Luo, G. A hyperbolic cosine latent trait model for unfolding dichotomous single-stimulus responses. Appl. Psychol. Meas. 1993, 17, 253–276. [Google Scholar] [CrossRef]
- Ding, P. Three Occurrences of the Hyperbolic-Secant Distribution. Am. Stat. 2014, 68, 32–35. [Google Scholar] [CrossRef]
- Gallay, O.; Hashemi, F.; Hongler, M.-O. Imitation, proximity, and growth a collective swarm dynamics approach. Adv. Complex Syst. 2019, 22, 1–43. [Google Scholar] [CrossRef]
- Parand, K.; Abbasbandy, S.; Kazem, S.; Rad, J.A. A novel application of radial basis functions for solving a model of first-order integro-ordinary differential equation. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 4250–4258. [Google Scholar] [CrossRef]
- Mao, X.; Joshi, V.; Jaiman, R. A variational interface-preserving and conservative phase-field method for the surface tension effect in two-phase flows. arXiv 2020, arXiv:2007.15887. [Google Scholar] [CrossRef]
- Haluszczynski, A.; Aumeier, J.; Herteux, J.; Räth, C. Reducing network size and improving prediction stability of reservoir computing. Chaos Interdiscip. J. Nonlinear Sci. 2020, 30, 063136. [Google Scholar] [CrossRef]
- Ngom, M.; Marin, O. Approximating periodic functions and solving differential equations using a novel type of Fourier Neural Networks. arXiv 2020, arXiv:2005.13100. [Google Scholar]
- András, S.; Baricz, Á. Properties of the probability density function of the non-central chi-squared distribution. J. Math. Anal. Appl. 2008, 346, 395–402. [Google Scholar] [CrossRef]
- Fischer, M.J. Generalized Hyperbolic Secant Distributions: With Applications to Finance, 1st ed.; Springer: New York, NY, USA, 2013. [Google Scholar]
- Harkness, W.L.; Harkness, M.L. Generalized hyperbolic secant distributions. J. Am. Stat. Assoc. 1968, 63, 329–337. [Google Scholar] [CrossRef]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Jaynes, E.T. Information Theory and Statistical Mechanics. Phys. Rev. 1957, 106, 620–630. [Google Scholar] [CrossRef]
- Secrest, J.A.; Conroy, J.M.; Miller, H.G. A unified view of transport equations. Physica A 2020, 547, 124403. [Google Scholar] [CrossRef]
- Guseo, R. Diffusion of innovations dynamics, biological growth and catenary function. Physica A 2016, 464, 1–10. [Google Scholar] [CrossRef]
- Wintner, A. On Linear Repulsive Forces. Am. J. Math. 1949, 71, 362–366. [Google Scholar] [CrossRef]
- Taylor, J. Analysis of the Nonlinear vibrations of electrostatically actuated Micro-controlled in Harmonic Detection of Resonance. Ph.D. Dissertation, Clemon University, Clemson, SC, USA, 2008. [Google Scholar]
- Risken, H. Fokker-Planck Equation. In The Fokker-Planck Equation; Springer Series in Synergetics; Springer: Berlin/Heidelberg, Germany, 1996; Volume 18. [Google Scholar]
- Stoychev, K.T.; Primatarowa, M.T.; Kamburova, R.S. Resonant interaction of solitons with extended defects. J. Optoelectron. Adv. Mater. 2007, 9, 155–158. [Google Scholar]
- Villegas-Martínez, B.M.; Moya-Cessa, H.M.; Soto-Eguibar, F. Exact and approximated solutions for the harmonic and anharmonic repulsive oscillators: Matrix method. Eur. Phys. J. D 2020, 74, 137. [Google Scholar] [CrossRef]
- Tokmachev, M.S. Modeling of truncated probability distributions. IOP Conf. Ser. Mater. Sci. Eng. 2018, 441, 012056. [Google Scholar] [CrossRef]
- Zybin, K.P.; Sirota, V.A.; Ilyin, A.S. Structure functions of fully developed hydrodynamic turbulence: An analytical approach. Phys. Rev. E 2010, 82, 056324. [Google Scholar] [CrossRef]
- Gómez-Liévano, A.; Vysotsky, V.; Lobo, J. Artificial increasing returns to scale and the problem of sampling from lognormals. Environ. Plan. B Urban Anal. City Sci. 2021, 48, 1574–1590. [Google Scholar] [CrossRef]
- Kamiński, M. Stochastic boundary element method analysis of the interface defects in composite materials. Compos. St. ruct. 2012, 94, 394–402. [Google Scholar] [CrossRef]
- Hereman, W. Shallow Water Waves and Solitary Waves. In Solitons; Helal, M.A., Ed.; Encyclopedia of Complexity and Systems Science Series; Springer: New York, NY, USA, 2022. [Google Scholar]
- Riecke, H. Solitary waves under the influence of a long-wave mode. Phys. D Nonlinear Phenom. 1996, 92, 69–94. [Google Scholar] [CrossRef]
- Sen, A.; Ahalpara, D.P.; Thyagaraja, A.; Krishnaswami, G.S. A KdV-like advection–dispersion equation with some remarkable properties. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4115–4124. [Google Scholar] [CrossRef]
- Boyadzhiev, K.N. A note on Bernoulli polynomials and solitons. J. Nonlinear Math. Phys. 2007, 14, 174–178. [Google Scholar] [CrossRef]
- Gürses, M.; Pekcan, A. Nonlocal nonlinear Schrödinger equations and their soliton solutions. J. Math. Phys. 2018, 59, 051501. [Google Scholar] [CrossRef]
- Seadawy, A.R. Approximation solutions of derivative nonlinear Schrödinger equation with computational applications by variational method. Eur. Phys. J. Plus 2015, 130, 182. [Google Scholar] [CrossRef]
- Hayashi, N.; Ozawa, T. On the derivative nonlinear Schrödinger equation. Phys. D Nonlinear Phenom. 1992, 55, 14–36. [Google Scholar] [CrossRef]
- Ma, W.; Chen, M. Direct search for exact solutions to the nonlinear Schrödinger equation. Appl. Math. Comput. 2009, 215, 2835–2842. [Google Scholar] [CrossRef]
- Taha, T.R.; Ablowitz, M.J. Analytical and numerical aspects of certain nonlinear evolution equations. II. Numerical, nonlinear Schrödinger equation. J. Comput. Phys. 1984, 55, 203–230. [Google Scholar] [CrossRef]
- Stephanovich, V.A.; Olchawa, W.; Kirichenko, E.V.; Dugaev, V.K. 1D solitons in cubic-quintic fractional nonlinear Schrödinger model. Sci. Rep. 2022, 12, 15031. [Google Scholar] [CrossRef] [PubMed]
- Carr, L.D.; Kutz, J.N.; Reinhardt, W.P. Stability of stationary states in the cubic nonlinear Schrödinger equation: Applications to the Bose-Einstein condensate. Phys. Rev. E 2001, 63, 066604. [Google Scholar] [CrossRef] [PubMed]
- Ulmer, W. Solution spectrum of nonlinear diffusion equations. Int. J. Theor. Phys. 1992, 31, 1549–1567. [Google Scholar] [CrossRef]
- Aibinu, M.O.; Thakur, S.C.; Moyo, S. Exact solutions of nonlinear delay reaction–diffusion equations with variable coefficients. Partial. Differ. Equations Appl. Math. 2021, 4, 100170. [Google Scholar] [CrossRef]
- Fokas, A.S. The Korteweg-de Vries equation and beyond. Acta Appl. Math. 1995, 39, 295–305. [Google Scholar] [CrossRef]
- Korteweg, D.J.; de Vries, G. On the Change of Form of Long Waves Advancing in a Rectangular Canal, and on a New Type of Long Stationary Waves. Phil. Mag. 1895, 39, 422–443. [Google Scholar] [CrossRef]
- Truitt, A.S.; Hartzell, C.M. Simulating Plasma Solitons from Orbital Debris Using the Forced Korteweg–de Vries Equation. J. Spacecr. Rocket. 2020, 57, 876–897. [Google Scholar] [CrossRef]
- Ludu, A.; Draayer, J.P. Nonlinear Modes of Liquid Drops as Solitary Waves. Phys. Rev. Lett. 1998, 80, 2125. [Google Scholar] [CrossRef]
- Darvishi, M.T.; Najafi, M.; Wazwaz, A.M. Soliton solutions for Boussinesq-like equations with spatio-temporal dispersion. Ocean. Eng. 2017, 130, 228–240. [Google Scholar] [CrossRef]
- Todorov, M.D. Nonlinear Waves: Two-Dimensional Boussinesq Equation. Boussinesq Paradigm and Soliton Solutions; Morgan & Claypool Publishers: San Rafael, CA, USA, 2018; pp. 1–33. [Google Scholar]
- Nadeem, M.; Islam, A.; Şenol, M.; Alsayaad, Y. The dynamical perspective of soliton solutions, bifurcation, chaotic and sensitivity analysis to the (3+ 1)-dimensional Boussinesq model. Sci. Rep. 2024, 14, 9173. [Google Scholar] [CrossRef] [PubMed]
- Vivas-Cortez, M.; Arshed, S.; Perveen, Z.; Sadaf, M.; Akram, G.; Rehan, K.; Saeed, K. Analysis of perturbed Boussinesq equation via novel integrating schemes. PLoS ONE 2024, 19, e0302784. [Google Scholar] [CrossRef] [PubMed]
- Gottwald, G.A. Dispersive regularizations and numerical discretizations for the inviscid Burgers equation. J. Phys. A Math. Theor. 2007, 40, 14745. [Google Scholar] [CrossRef]
- Kaniadakis, G. Statistical mechanics in the context of special relativity. Phys. Rev. E 2002, 66, 056125. [Google Scholar] [CrossRef] [PubMed]
- Kaniadakis, G. Statistical mechanics in the context of special relativity. II. Phys. Rev. E 2005, 72, 036108. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Secrest, J.A.; Jones, D. Maximum Entropy Solutions with Hyperbolic Cosine and Secant Distributions: Theory and Applications. Foundations 2024, 4, 738-753. https://doi.org/10.3390/foundations4040046
Secrest JA, Jones D. Maximum Entropy Solutions with Hyperbolic Cosine and Secant Distributions: Theory and Applications. Foundations. 2024; 4(4):738-753. https://doi.org/10.3390/foundations4040046
Chicago/Turabian StyleSecrest, Jeffery A., and Daniel Jones. 2024. "Maximum Entropy Solutions with Hyperbolic Cosine and Secant Distributions: Theory and Applications" Foundations 4, no. 4: 738-753. https://doi.org/10.3390/foundations4040046
APA StyleSecrest, J. A., & Jones, D. (2024). Maximum Entropy Solutions with Hyperbolic Cosine and Secant Distributions: Theory and Applications. Foundations, 4(4), 738-753. https://doi.org/10.3390/foundations4040046