1. Introduction
Thermodynamics is the study of physical systems in nature that eventually evolve in time to stationary macrostates, in which any disturbance generates
restoring forces to bring them back to the stationary macrostates [
1,
2,
3], which makes them
stable macrostates, usually called
equilibrium (EQ)
macrostate , satisfying certain stability conditions. Any disturbance to modify macrostates of the system invariably results in nonequilibrium (NEQ) processes so that they abound in nature and obey the well-established second law [
4,
5,
6,
7]. The law is also obeyed by biological systems [
8,
9]. However, NEQ processes are not well-understood, as the corresponding thermodynamics (NEQT) is not yet fully developed, despite it having a long history of various competing schools [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28], among which are the most widely known schools of local equilibrium thermodynamics, rational thermodynamics, extended thermodynamics, and GENERIC thermodynamics [
21,
29]. They mostly deal with the time evolution of macroscopic quantities only; the latter emerge as instantaneous averages over microstates in a more fundamental and statistical approach, and are used to characterize any thermodynamic
process and the resulting nonnegative entropy generation
, as first proposed by Clausius [
30,
31]. In contrast, the equilibrium (EQ) thermodynamics (EQT) in which
is based on the original ideas of Carnot, Clapeyron, Clausius, Thomson, Maxwell, and many others [
3,
12,
32,
33,
34,
35,
36,
37,
38,
39,
40,
41,
42,
43,
44,
45], and has by now been firmly established in statistical physics, thanks to Boltzmann [
46,
47] and Gibbs [
48], who established that classical EQ thermodynamics is a direct consequence of the EQ statistical mechanics [
33,
34,
37,
38] that deals directly with microstates
of the Hamiltonian
of the system, and their equilibrium probabilities
that together specify the EQ
macrostate . In contrast, EQT deals directly with
without any need to know
and
.
In general, the collection
of microstates and their probabilities is used in a statistical description of a macrostate
of the system
that may be isolated or interacting with a medium
, as shown in
Figure 1. The same microstate set
determines different macrostates depending on the probabilities
with which
appears in
. As
is by definition deterministic,
is also deterministic. Thus, it is independent of
, but is specified by its energies
and the parameters defining
. Because of this,
and
are the
same for any of its possible macrostates
including
. This allows
to be treated as purely mechanical, which is then supplemented by
to add stochasticity to the mechanical system. Such a description has proven very useful in EQ statistical mechanics [
33,
34], where the concepts of the entropy
that was first introduced by Clausius [
30,
31] as a
state function of
, and the temperature
T are the new concepts that play a central role in the resulting EQ thermodynamics of
. As such, it is very common to use them to distinguish a thermodynamic system from a mechanical system by recognizing that the concept of heat (a consequence of a particular commutator as described later) is novel to thermodynamics but is not applicable to a mechanical system, which is traditionally taken to be described by a purely
conservative Hamiltonian
. We use
to collectively denote the number of particles
N, their energy
E, the volume
V occupied by them, etc., as representing the common thermodynamic extensive state variables that determine
in the state space
spanned by
. We call them
observables. As observables, these variables can be controlled from the outside of the system. We will allow
to have time dependence in this work; here,
t denotes the time. For the moment, we suppress the suffix “eq” for notational simplicity unless necessary as we are dealing with
. To be useful,
S and
T must
uniquely refer to the thermodynamic state
. This unique relationship is what is meant by
S being a state function of
, which when inverted gives
E a state function of
, where
stands for deleting
E from the set preceding it. Being functions of
of
,
S and
T, an intensive field, must be interrelated in some fashion such as
(see Equation (
129)) so only one of them can be treated as a
primitive concept, which we take to be the entropy. The goal of NEQT is to then specify it in terms of
in the state space
. In this respect, having
S a state function considerably simplifies the study as we then deal with
. When this cannot be done, we must go beyond
to an extended state space in which the NEQ entropy also becomes a state function, which is the central theme of this review. In this space, a uniform global temperature of the body is defined as its unique field by the above derivative in the extended state space. Thus, our goal will be to identify the NEQ entropy in this space.
Although
S plays important roles in diverse fields ranging from classical thermodynamics of Clausius [
3,
10,
12,
13,
17,
20,
24,
25,
30,
33,
39,
40,
41,
42,
43,
44,
46,
47,
48,
49,
50,
51,
52,
53,
54,
55,
56,
57,
58], quantum mechanics and uncertainty [
59,
60,
61], black holes [
62,
63,
64], coding and computation [
65,
66,
67], to information technology [
68,
69,
70,
71,
72], it does not seem to have a standard definition in all cases, even though it is well-defined under EQ conditions, as extensively discussed in the literature; see, for example, [
46,
47,
48,
73,
74,
75,
76,
77,
78]. As
is uniquely determined by
as a state function,
’s must be
unique functions in
, as is well-known [
33]. Requiring this uniqueness will be a guiding force in our endeavor to formulate the NEQ statistical mechanics. Whether
S has any physical significance in a NEQ macrostate
has been a topic of extensive debate; see for example [
73,
74,
75,
76,
77] and references therein. The problem arises because it is not clear if, and how,
can be
uniquely identified. Because of the lack of uniqueness, introducing
as a state function becomes nontrivial. The same concern also applies to
.
Recently, we have been able to extend the classical concept of Clausius entropy from EQ states to NEQ states where irreversible entropy is generated [
75,
76,
77,
78]. That approach is an outgrowth of an earlier review [
79] in this journal about a possible source of stochasticity that is required in a thermodynamic system, even though its mechanics is completely deterministic due to its Hamiltonian dynamics so that heat and temperature have no mechanical analogs. Not appreciating that the source of stochasticity is independent from the deterministic (mechanical) aspect has been a source of bitter debate between Boltzmann, Zermelo, Poincare, and many others ([
45,
56,
79,
80,
81,
82,
83,
84,
85,
86,
87,
88,
89,
90,
91,
92,
93,
94,
95,
96], and references cited in there). The dispute required Boltzmann to propose the ideas of
molecular chaos and of the
ergodicity hypothesis [
91] that have played a major role in EQ statistical mechanics. We discuss these important ansatze in [
92,
93,
94,
95] with an emphasis on Kac’s ring model [
97,
98] in more detail, where we find that they are not fulfilled in a deterministic dynamics. We infer, as is commonly believed, that one needs a stochastic dynamics for the ansatz to be satisfied. Both these ideas can only be supported by a stochastic dynamics as discussed in these references [
99,
100,
101,
102].
It is clear that we need to supplement a purely mechanical approach by supplementing it with stochasticity. We accomplish treating both aspects separately but unifying them together and enabling uniqueness by using an extended state space spanned by extensive state variables (compactly denoted by as an extension of in this review) to obtain a state function S. In general, includes the observables but possibly some more independent variables, compactly denoted by required for an NEQ situation, as will become clear later. The additional state variable , when properly chosen as will be described later, allows for a unique description of the macrostate in . Once such a state space has been uncovered for , its entropy also become a state function in . This again requires its ’s to be unique functions in , just as are in . Thus, the identification of an appropriate immediately solves the problem of obtaining a unique statistical mechanics of an NEQ system as it directly leads to as a unique function of and in .
In order for such an approach to work, and in particular for
, which itself is a system quantity, it is crucial that we deal with only
system-intrinsic (SI) quantities (they are determined by the system), and not
medium-intrinsic (MI) quantities (they are primarily determined by the medium) for the simple reason that utilizing
requires their specification by the Hamiltonian of the system and so require SI-quantities for its specification. (We will use
body to refer to
, and
, and BI-quantities to refer to quantities of a body.) As will become clear in the following, these quantities capture the internal processes going on within the system. They cannot be fully captured by the MI-quantities, even though they have been traditionally used in thermodynamics, for the simple reason that they retain the memory of the medium and can depend on the system only weakly. Thus, they will require additional steps to study internal processes. There has been a long debate about the relevance and significance of the two kinds of quantities that ensued from a very different perspective [
103,
104,
105,
106,
107], but did not capture the importance these quantities acquire in our approach.
The SI-quantities allow us to develop our NEQ statistical mechanics, which for brevity is identified as the
NEQT, with
referring to the microstates
, in which we directly capture internal processes that are responsible for irreversibility. As the collection
is the central object in the
NEQT, the latter deals with quantities such as
. At the microstate level, there are
fluctuations that are essential in a statistical treatment, and are properly captured in the
NEQT through the fluctuations in
and
over
. In contrast, the use of the MI-quantities does not directly describe
so it
cannot properly yield a statistical mechanical description of an NEQ process in a system. This is one of our most important conclusions. In particular, an important consequence of the
NEQT as will be shown later is that MI-quantities, after
reduction (being averaged over the microstates of the medium) under commonly accepted conditions of quasi-additivity and quasi-independence, do not exhibit any fluctuations. This explains why they are not suitable in developing the statistical mechanics. We call the resulting version of the microstate NEQT the
NEQT; the circle on
is a reminder for the use of “exchange” microquantities derived from the MI-quantities in its formulation. The most prominent are the exchange (also called external) microwork
, and the exchange (also called external) microheat
, thus, explicitly exhibiting that they have no fluctuations. Because of this, it does not directly capture internal processes at the microstate level, which require additional steps to describe irreversibility as mentioned above. The corresponding macroscopic NEQT from the two approaches are called the MNEQT and the
, respectively; here, M stands for the macroscopic description in terms of macrostates, the circle again having the same connotation as above. There are no fluctuations in these theories, as is well-known. The
is the standard formulation of classical thermodynamics and has been discussed extensively by many prominent scientists [
13,
18,
33,
39,
41,
42,
51,
108], some including internal variables that play an important role in our approach.
It should be obvious from the above discussion that we need to make a clear distinction between fluctuating (Fl) and nonfluctuating (NFl) quantities. In addition, we also recognize that there are many other macrostates in
for which neither
S nor the corresponding
’s are unique functions in
, so
S must be treated independently of
. Our previous work did not consider such states, but they will be considered in this review. For this purpose, we will find it convenient to introduce the following state variable sets:
and the corresponding state spaces
, and
, where the suffix denotes the variable set forming the state space.
We should emphasize that internal variables also appear in mechanical systems. A simple example is that of two particles in a system, whose interior is hidden in the lab from us so that we cannot see where the particles are inside the system. From outside the system, we can only be aware of the position of the center of mass by observing its motion in the lab. However, there is no way to determine their separation within the system. This separation and the corresponding relative motion are examples of the internal variable and its motion, and play a role in the dynamics of the mechanical system. Thus, it should not come as a surprise that such internal variables will also be relevant in a thermodynamic system. Indeed, we will see later in
Section 14 that this relative motion becomes the source of “microfriction”, resulting in friction, when we treat the system in thermodynamics.
To appreciate at a more fundamental level the distinction between a mechanical and a thermodynamic system, we first realize that both systems are usually separated from their surroundings
by some clear partitions, the most common being the walls between them; see
Figure 1. We collectively call them
containers or
walls that contain the system [
109]. In this review, we find it convenient to not include the container as part of the system, but use it to determine the boundary conditions for the equations of motion or as defining parameters in the Hamiltonian
of the system
. As
plays the role of
E, the parameters
and
are obtained by taking out
E from
and
, respectively:
where ⋯ refers to the rest of the elements in
besides
V [
110]. As will become evident below, these parameters denote the
work parameter in the Hamiltonian, which we will denote by
or
, respectively. For simplicity in the following, we will always use
for the work parameter to refer to both cases and express the Hamiltonian as
. The parameter can be varied in a process with a concomitant change in
due to the work done by the system. This is in accordance with the work–energy theorem of mechanics that states that the change in the energy is due to work alone. Also,
is the
dynamical variable and denotes the collection of coordinates
and momenta
of the
N particles in the phase space
of
[
110]. As internal variables play no role in EQ,
in EQ. For any
, the deterministic energy of
in the state specified by
is
, which need not be constant. However, there is no stochasticity so there is no concept of heat. Thus, the Hamiltonian itself cannot explain the fundamental difference between the two systems [
79].
We elaborate further. Mechanics is a branch of the physical science to study the
deterministic behavior of the system in the presence of
known forces and radiation in time. The central concept is that of energy whose changes are governed by deterministic Hamiltonian equation of motion in
with deterministic boundary conditions such as at the walls confining the system
(see
Figure 1a) that generate deterministic wall potentials acting on the particles. Accordingly, a point
is uniquely determined by
at some reference time
. A central aspect of the equation is that it uniquely determines the properties of the system in the future (
) as well as in the past (
) [
111,
112]. We will assume in this review that the fundamental weak nuclear forces are not included in our discussion [
113]. A movie of such a deterministic process in the future, when run backward for the past, will appear just as natural with no hint of the direction of the time flow. Thus, starting from
, which also identifies a microstate [
110], at
t, the state undergoes a unique state transformation
in the same interval
for any
. If we now consider an ensemble of the same mechanical system, each prepared in the state
at
, then at
, each system will be in the same state
. In the language of probability theory [
114], we say that
follows with certainty from
in
. (This will be useful later to associate the concept of a constant entropy to a mechanical system but not heat.)
But the above invariance is contrary to our daily experience as a rule [
115,
116,
117,
118,
119,
120,
121,
122,
123,
124]. For example, the initial state
may be when all the gas particles are confined to a small portion of the container [
109] located at the center of the container. We are not interested in particle momenta. As the gas expands spontaneously, it occupies the entire volume uniformly. However, once the gas has occupied the entire volume in the state
, the reverse evolution is not seen in nature. Similarly, the cream mixed in a cup of coffee does not ever unmix on its own. The smoke from a burning piece of wood only spreads out in the room, but never confines itself on its own. If we run the movies in any of these cases backward, we immediately realize that the backward movies do not represent physical phenomena that are consistent with our daily experience.
This lack of time-reversal invariance of the equations of motion is a natural fact of daily life where we deal with
macroscopic systems [
125] that eventually evolve in time to
. This is at the root of the second law of thermodynamics, and can be easily explained as follows. It happens here that each member of the above ensemble that was initially prepared in the same state
evolves during a fixed interval
into
different states
for different
then the certainty implied in Equation (
4) is lost so that most often it would happen that the states of different members after
would have no discernible pattern for
and appear haphazard for the members. The result is ([
126], pp. 1–14)
a loss of physical determinism [
127]. Thus, the mapping
in (
5) between
and one of its evolved states
is
one-to-many, and the mapping becomes unpredictable, i.e.,
stochastic [
114]. One possible explanation of the loss of certainty at the level of states lies in the presence of stochasticity in the system due to the uncontrollable interactions with the surroundings, as discussed elsewhere [
79] and elaborated later in
Section 7. This is the foundations of classical probability theory by Laplace, and used to formulate the idea of density matrix by Landau [
59,
128] and von Neumann [
129]. In this case, the mapping (
6) cannot be reversed, and we cannot perform time-reversal of the evolution anymore. It is the success of a probabilistic approach to nonequilibrium thermodynamics that prompted Maxwell [
50] and Boltzmann [
130,
131] to promote the “ergodic hypothesis” to achieve EQ. One of our aims in this review is to follow the consequences of this stochasticity in the dynamics such as in the Brownian motion [
132] and Langevin’s equation [
133], and extend the concept of ergodicity to a special class of NEQ states [
134] that has been identified as internal equilibrium states; see Definition 9.
1.1. Scope of the Review
It should be obvious that the scope of the NEQ statistical mechanics, the
NEQT, is more general than that of the equilibrium statistical mechanics, to be denoted here simply as the
EQT in short, in that the attempts are now mostly to deal with the most general time evolution of microscopic quantities in the former. The instantaneous averages of these quantities over microstates
are used to specify the instantaneous macrostates
required to characterize any thermodynamic
process in time in the MNEQT. Thus, the tasks in the
NEQT and the MNEQT are more difficult and their foundations less developed, which justifies the motivation of this review. The exception is the validity of the first law in terms of
exchange (or
external) work and heat between
and
in thermodynamics, which plays a central role in the
. These MI-quantities are determined
uniquely by
regardless of
being reversible or irreversible, and are easily identified under generally acceptable conditions such as
always being in EQ, quasi-additivity and quasi-independence; see later. Some of the approaches in the
employ the enlarged state space
[
18,
21,
42,
108]. Being associated with an EQ
, the MI-quantities including the exchange (or external) entropy carry no information about irreversibilities going on within the system. In contrast, the MNEQT based on the use of the SI-quantities include, by definition, these irreversible contributions so they are directly obtainable. One of our goals, besides laying down the foundations of the
NEQT, is to justify the MNEQT from the
NEQT.
A system in EQ always has its observables uniformly distributed throughout the system so it is uniform in
[
33]. In contrast, an NEQ system is not uniform and requires additional information about the nonuniformity to uniquely specify its states, which is provided by a proper choice of internal variables in
. The set
allows us to treat
as
uniform in the state space
(see
Section 5.7) so that there is a unique thermodynamic temperature and other fields for the entire system even though it is still nonuniform in
. This is very useful to obtain a proper thermodynamics of the system. For example, the single thermodynamic temperature
T even for a nonuniform system satisfies
Clausius’s theorem that heat flows from hot to cold. This is what makes the
NEQT in the extended space
so useful and desirable.
Various microquantities associated with (having microstates ), (having microstates ), and (having microstates ) carry the suffix , and , respectively. However, we are only interested in microquantities associated with as our focus is on . This means that microquantities of and must be manipulated so that they can be associated with . To accomplish this, we introduce the principle of reduction, which accounts for the correlation introduced by mutual interactions between and . Under commonly accepted conditions about , the principle shows that the effect of on can be incorporated by treating its microquantities in the form of exchange (or external) quantities having no fluctuations. This is what makes the MI-quantities play such an important role in classical thermodynamics, but makes them unsuitable to extract fluctuations in a statistical theory.
Our goal here is to provide a comprehensive and self-contained introduction to our recently developed NEQ statistical mechanics (
NEQT), in which we study deterministic time evolution of individual microstates in
along Hamiltonian trajectories in
during
. When quantities associated with these trajectories are averaged over them using their probabilities, the result is the MNEQT, an extension of the equilibrium thermodynamics to describe NEQ processes. This consistency with the MNEQT is not only a check on the validity of the
NEQT, but also a justification of the MNEQT by the
NEQT. The use of the SI-quantities in the
NEQT allows for directly obtaining quantities such as
after averaging. Thus, the
NEQT is an extension of the EQ statistical mechanics [
33,
34], the
EQT, that was originally developed by Boltzmann [
46,
47] and Gibbs [
48], and limited to
.
We will follow deterministic trajectories
during
between two macrostates
and
. Only the latter determine the trajectories so they are the same for all processes
between them. This makes
independent of the trajectory probabilities
controlling various
’s, which is similar to
being independent of the microstate probabilities
. The extended state space
is chosen appropriately to uniquely specify
and
in it. This uniqueness is an important aspect of the
NEQT and the MNEQT as it is missing in other contemporary NEQT theories [
10,
12,
13,
17,
18,
19,
20,
21,
24,
25,
26,
27,
28,
99,
135,
136,
137,
138,
139,
140,
141,
142,
143,
144,
145,
146,
147]. The instantaneous
along
can only change mechanically due to the variation in
. This variation is responsible for the net change
along
, and is only determined by
and
and not by
as noted above. To complete the formulation of the
NEQT, we determine the
unique for any
in
, which is another exceptional aspect of the
NEQT. This way, the deterministic aspect of a process (the mechanical work) has been separated from the stochastic aspect (the heat) in thermodynamics in a unique way in the
NEQT for any
, NEQ or not. With the unique probabilities in hand, all calculation can be carried out
exactly in the
NEQT, once
has been identified. In the
NEQT, the trajectory probabilities need to be determined using additional steps such as using the master equation [
54], Fokker–Planck equation [
37,
102], etc., which are phenomenological.
Being deterministic, microquantities associated with
or
are not constrained by the second law, which is a macroscopic law based on stochasticity. This is not surprising, as the Hamiltonian dynamics has nothing to say about the second law. For the MNEQT, we need to determine various thermodynamic averages over
using
. Thus, the development of the
NEQT is carried out in two independent stages. First we determine mechanical quantities as if the system is a mechanical one following Hamiltonian dynamics. Its stochastic aspects are captured by
, which determine not only mechanical averages such as work but also the stochastic averages such as heat and entropy. It is the latter that finds itself manifested in the second law for appropriate choices of
and
. By simply modifying the second stage, we are able to investigate
the catastrophic consequences of violating the second law. This proves the usefulness of our approach. With
and
in hand, we now have a complete NEQ statistical mechanics to describe any process
. The division in the two
distinct and
independent stages is of central importance to the
NEQT and the MNEQT [
148,
149,
150,
151,
152,
153,
154,
155,
156,
157].
We have successfully applied the
NEQT recently to study free expansion [
154], to provide a correct application of microwork and microheat [
155,
156] in the various modern fluctuation theorems [
26,
158,
159], and to describe viscous dissipation [
157] associated with the dynamics of a Brownian particle (BP) [
115,
132,
133,
140] in its medium by developing an alternative to the stochastic Langevin description [
38,
99]. The above applications clearly show the usefulness of the
NEQT. However, our previous studies were mostly limited to microworks; microheats were not treated as extensively. One of our major incentives here is to overcome this limitation to determine the
NEQT for which the central requirement is the unique microstate probability
in the state space
. This ensures that
and
are uniquely identified in
. Such macrostates are said to be in
internal equilibrium (IEQ) in
and written as
or
, as opposed to EQ macrostates
in
. The unique entropy
has the maximum possible value for a given
so it has no memory of where the microstate has come from. Once
becomes uniquely specified as
in
, it satisfies the extension of the
ergodic hypothesis for
; see
Section 14 for an example.
But the applications so far of the
NEQT have provided only a piecewise and incomplete description of the
NEQT [
148,
149,
150,
151,
152,
153,
154,
155,
156,
157] that was restricted in scope to highlight its NEQ aspects in the limited context. This comprehensive review aims to overcome this limitation and provide a complete introduction to the foundation of the
NEQT by assimilating and extending together the previous results and by including missing details and newer aspects that emerge from the use of the SI-quantities in the extended state space
, where
and
are uniquely specified in an IEQ macrostate
just as they are uniquely specified for an EQ macrostate
in the EQ state space
. The
NEQT has met with success, as we will describe in this review, so it is desirable to introduce it to a wider class of readers.
Due to its microscopic SI-nature, the
NEQT provides a more detailed description of fluctuations in a thermodynamic process that are hidden in the MNEQT. For this reason, therefore, the former is highly desirable from both a theoretical and experimental point of view. It is an extension of the MNEQT [
77,
78,
134,
148,
149,
152,
153,
160] to the microstate level, which brings about a very close parallel with
EQT [
32,
33,
34,
36].
A microstate
, carries an index
k; the set
forms a
countable set and is specified by its energy set
; however, we will usually suppress
in
and
, unless necessary. In a macrostate
,
’s appear with a probability
; see
Section 7 for details. For simplicity, we will also not explicitly show the argument
in
; the dependence is always implicit. In the rest of the review, all quantities pertaining to
are identified as
macroquantities, while those pertaining to
are identified as
microquantities that always have the microstate index
k of
or of
in
; see Definition 4. After statistical averaging over microstates using their probabilities
(see Equation (
12) for its proper definition), we obtain quantities without
k or
.
A microquantity associated with will always carry the index k (see later). A macrostate and a macroquantity associated with it do not carry the index k so it is always easy to distinguish the two kinds of quantities. We will continue to use “quantity” to stand for both microquantity and macroquantity, unless clarity is needed.
1.2. System-Intrinsic and Medium-Intrinsic Thermodynamics
As the medium is always taken to be in EQ, its properties do not change even if the system is out of equilibrium. This has made the choice of MI-description (
) very convenient to formulate classical thermodynamics [
13,
18,
33,
39,
41,
42,
51,
108], in which one uses the exchange macroheat
in terms of the exchange entropy (see Equation (
46)) and the exchange macrowork
(see Equation (
135c)) such as
for the PV-macrowork; see Equation (
94) for the first law as an example. Here,
and
are the temperature and pressure of the medium (see
Figure 1), which remain the same for all possible states of the system. This has made the
a highly desirable thermodynamic theory as it is applicable in all cases. The main problem with this theory is that it is not directly applicable to an isolated system in
Figure 1b for which exchange quantities are identically zero, but which provides the most cogent formulation of the second law
; see Equation (
213) in Proposition 3. It is useful only for an interacting system in
Figure 1a for which the second law is stated indirectly in terms of irreversible entropy generation
; see Equation (
67c). Indeed, all irreversible quantities including irreversible macrowork are indirectly determined.
In contrast, the MNEQT provides an SI-description involving quantities associated with the system alone so it is applicable to both systems in
Figure 1 by explicitly taking into account the EQ properties of the medium, when it is present. All irreversible quantities including macroworks and macroheats are contained in this approach so they are determined directly in the MNEQT.
We elaborate on the distinction between the MNEQT and the
. The exchange quantities
require the system
to be embedded in a medium
(see
Figure 1a) and are controlled by
[
154] so that
(see
Section 2) and are easy to handle and measure, as
is normally taken to be in equilibrium with no irreversibility (
) so that
. Thus, the exchange quantities do not directly provide any information about
and any irreversibility as mentioned above. As an example, the lost macrowork due to irreversibility in the
is defined as
where various
and
refer to the exchange macroworks along two distinct processes: a reversible and an irreversible. We have used a new notation
to ensure that any
is not confused with
in the MNEQT. It is easy to see that
is precisely the irreversible macrowork
, which is determined by the actual process.
Similar distinctions can also be noted between the NEQT and the NEQT; they differ at least in the following important ways, with sweeping consequences, as we will see:
- A.
The internal microwork
has no analog in the former because it uses the following questionable conjecture:
(see
Section 15) which is often used in fluctuation theorems [
99,
135,
136,
137,
138,
139,
140,
141,
142,
143,
144,
145,
146,
147]; the use of
is a reminder of its possible questionable nature, which is justified later in Theorem 7. In these fluctuation theorems, one begins with the conventional form of the first law
in terms of exchange macroquantities, but identifies
As a consequence of the above identification, no distinction can be made between fluctuating microwork
which is an identity in accordance with the work–energy theorem (see Theorem 6) and nonfluctuating exchange microwork
see Theorem 7. The distinction is always maintained in the latter, in which we also show (see
Section 10.1) why the above identification cannot be rigorously justified. Similar conclusions as above are obtained by replacing infinitesimal
by accumulation
, properly defined in
Section 13 along a process
.
- B.
Consequently, the microforce imbalance (FI) that results in fluctuating , a ubiquitous quantity, is absent in the former in that but is always present () in the latter.
- C.
The former results in a first law of thermodynamics (
) for each
, while the latter has it hold (
) only for a
; however, see Equation (
243).
- D.
The lost or dissipated macrowork measured by the average should be absent in the former due to its above conjecture, but is always present in the latter.
- E.
The exchange microwork depends on the entire trajectory in the former to make it fluctuating over , while in the latter, depends only on the terminal microstates of , and is nonfluctuating (it is the same for all ’s).
1.3. Main Results
The review emphasizes the very close parallel with EQ statistical mechanics (
EQT) that is clearly seen in the microstate probabilities and the existence of IEQ partition functions for
. There are also major differences mainly in new concepts, some of which are very counter-intuitive, such as ubiquitous
, microforce imbalance (
FI) and internal microwork
resulting from it, etc., for any macrostates including
that have not been appreciated so far. They have been introduced previously [
77,
78,
150,
156,
157] but now receive detailed explanation here. For example, it is a well-known fact that
[
12] (see Equation (
53a)) for any
; yet
is fluctuating and so can be different from zero, its average. The presentation here is simple enough to reach even an untrained reader. To accomplish this goal, we only focus on some examples borrowed from undergraduate physics so that a reader will not be lost; however, it does require an open mind to learn new concepts that are counter-intuitive and perplexing, as it is very hard to shake off old preconceptions.
Remark 1. As μEQT only deals with EQ processes, the second law plays no role here. However, the situation in the μNEQT is different, where we deal with NEQ processes. As the second law does not operate at the microstate level, our development of the μNEQT is not limited by this law. To make contact with thermodynamics, however, we will have to impose it at the level of macrostate. By investigating the internal inconsistencies that emerge if the second law is violated, we are able to conclude that the law cannot violated for a stable system. This is one of the most important benefits of our approach.
Throughout this review, we work in the enlarged state space
so we include at least one internal variable
as a prototype to make our discussion more realistic, as will become clear in
Section 4 and
Section 14. The main emphasis here will be to demonstrate the
ubiquitous nature of internal changes such as
, a new concept whose existence has not been previously appreciated in various fluctuation theorems [
26,
158,
159]. Not recognizing its existence has resulted in the conjecture
(see Equation (
7)), used extensively in the
NEQT. This is contrary to a central result of the
NEQT; see Theorem 6. It is the
microforce imbalance (
FI) between the internal and external microforces, a hitherto unrecognized purely mechanical concept at the microstate level in EQ and NEQ thermodynamics, that generates
and is present in
all processes, whether they are thermodynamic or not, as we will demonstrate. This is the most important outcome of the our approach; see Proposition 2. It emphasizes the importance of SI-quantities (such as in
) that are very different from the MI-quantities (such as in
) for any
, even if the trajectory belongs to a reversible process. The use of generalized work
in Equation (
234a) as
isentropic change allows us to calculate microscopic work (microwork)
, which changes
but not
. This is because
, whose concept is independent of
, uniquely determines
for a fixed work set
; see Definition 5. Therefore,
is uniquely determined by
and does not have any contribution from the change in
. On the other hand, the generalized heat
allows us to introduce microscopic heat (microheat)
, which does not change
but changes
.
The above mutually exclusive nature of and proves to be a great simplification and allows us to treat and as purely a mechanical and a stochastic concept, respectively, in the development of the NEQT. In addition, as
does not have any contribution from
, it has no microheat contribution, so there is no first law for
in the
NEQT.
As is fluctuating, is also fluctuating and is uniquely determined as for ; the (slow or fast) nature of the process is irrelevant. The latter only controls . This provides a simplification in evaluating the cumulative change , which is independent of the nature of between two macrostates; see Remark 71 and the discussion following it. The fluctuating microwork is different from , which is the microwork done by the working medium on after reduction, and which depends strongly on the nature of but is the same for all microstates for a given .
The most important new results that emerge in the NEQT are the following:
a clear separation of different kinds of work and heat and their fluctuations that emerge from ;
additional thermodynamic forces for irreversibility due to internal variables;
stochasticity resulting from a nonvanishing commutator ;
exchange microquantities are nonfluctuating, which makes them useless for directly obtaining fluctuations and irreversibility;
the fundamental identity between irreversible macrowork and macroheat generalizing the result of Count Rumford and the Gouy-Stodola theorem;
the origin of work dissipation in an irreversible process;
the uniqueness of macrostates and microstate probabilities in the enlarged state space for determined by the experimental setup;
the NEQT justifies the MNEQT as the EQT justifies the EQT.
1.4. Layout
The layout of the paper is the following. In the next section, we introduce our notation, definitions, and new concepts, which may be unfamiliar to many readers but are justified in the following sections. We describe here our basic approach that a thermodynamic description is equivalent to treating microquantities as purely mechanical without any consideration of stochasticity, to be followed by bringing in microstate probabilities to determine macroquantities, just as in EQ statistical mechanics. Microstate probabilities are not truly microquantities as they are not independent of each other. The stochasticity adds the dimension of entropy, without which we only have a mechanical description of an NEQ body in
. An arbitrary macrostate
is divided into an EQ macrostate
and an NEQ macrostate
; the latter is further divided into an IEQ (internal equilibrium) macrostate
and an NIEQ (non-internal equilibrium) macrostate
. The IEQ macrostates share all the properties of EQ macrostates, except that the former have nonvanishing irreversible entropy generation
. The principle of reduction is also introduced here. In
Section 3, we discuss the mathematical properties of and manipulations with the linear operators
, and give some examples for clarification. The origin of internal variables is explained in
Section 4, where we show that they also emerge in mechanical descriptions so that they are not unique to thermodynamics. This explains why we need the enlarged state space
for microscopic mechanical descriptions as well. We finally present the fundamentals of the
NEQT in
Section 5. This is a very important section, where we present various axioms and requirements of the
NEQT. We then discuss stochasticity to derive a very general formulation of the entropy in terms of
, which is then used to obtain the unique form of
for
. An important and surprising aspect of the
NEQT is obtained in the equality of internal microwork (a mechanical microquantity) and microheat (a stochastic microquantity) even though they have distinct origins. At this stage, we have a complete and unique NEQ statistical mechanics (the
NEQT) in
. We identify SI-macroquantities and use them to derive the MNEQT for
exemplified by the Gibbs fundamental relation in
, which is then generalized to obtain the Gibbs fundamental relations for
in
.
In
Section 6 and
Section 7, we begin to introduce the mechanical and stochastic aspects of the
NEQT, respectively. In
Section 6, we use
to identify microforces that operate in the mechanical formulation of the body so they are also present in its thermodynamic formulation. We use them to introduce the concept of microforce imbalance in
Section 6.4, which captures the mechanical disparity between
and
. The imbalance is responsible for the internal microwork. In
Section 6.5, we derive the extension of the work–energy theorem of mechanics in
. In
Section 7, we revisit a previous proposal for the origin of stochasticity and extend it further by discussing the effect of correlations between
and
, and introducing the principle of reduction in
Section 7.2. We then discuss quasi-independence in
Section 7.3, and the simplification it brings about in thermodynamic considerations after reduction, especially with respect to the effects produced by
on
, which is discussed in
Section 7.4 and
Section 7.5. The discussion, which forms a very important part of the review, shows why classical thermodynamics works so well.
In
Section 8, we discuss the properties of the unique entropy
for
in
, and discuss its approximate formulation as a flat distribution that is commonly used in EQ statistical mechanics. This distribution neglects any fluctuations in the entropy, which are always present in the body. Despite this, it correctly gives the entropy so it can always be used to determine it as it simplifies the calculation. We show that the entropy additivity requires quasi-independence in
Section 8.1 so the latter should not be confused with the principle of additivity for
. Using this flat distribution, we provide a simple proof of the second law for
in
in
Section 8.3 by simply counting the number of distinct microstates as the system evolves in time, which can only increase with time; see Theorem 8. This direct proof is supplemented by Theorem 9 in
Section 8.4 that the law is simply a direct consequence of the stability of the system so it does not need to be included as an additional part of Axiom 2 in the
NEQT; see
Section 5). In
Section 9, we show that a violation [
161] of the second law results in internally inconsistent thermodynamics for stable physical systems, and cannot be taken seriously (see Conclusion 7), even though thermodynamic instabilities arise in approximate calculations such as van der Waals equations or mean field, but are always removed from consideration; see Remark 58. Therefore, we will always assume that we are dealing with a stable system for which the law is always valid, as noted in
Section 1, except in
Section 9. In
Section 10, we initiate the formulation of the
NEQT by focusing on the two most important concepts, those of generalized or BI-microwork and microheat for
. We show that various micro- and macroheats emerge from the nonvanishing commutator
introduced in Equation (
229). For a fuller understanding, we first revisit in
Section 10.1 the ensemble average of a fluctuating state variable, and its change in a process
. We show that for
such as
E belonging to
, its change
consists of two independent process contributions in orthogonal state spaces
and
, a mechanical one
at fixed
in
, and a stochastic one
at fixed
in
. Thus,
. In contrast, the stochastic state variable
has only stochastic contributions belonging to
. For
E,
represents the negative of the generalized macrowork
, and
the generalized macroheat
in the body. Their statistical interpretation is covered in
Section 10.2, where we show that
is purely mechanical, and
purely stochastic. In
Section 11, we discuss how
and
are determined, and how they determine the forms of various microworks, microheats, and microentropies. We also give a general proof of the identity
, even if
. This now completes the formulation of the unique NEQ statistical mechanics (
NEQT) in
.
The only thing remaining for a complete formulation of the
NEQT is to identify the choice of
, which is discussed in
Section 12. This is a very important section that describes how the choice of
is dictated by the way an experiment is performed, which must not come as a surprise for an NEQ process. This is because the observation and relaxation times play important roles here. By ordering various internal variables with their relaxation times in decreasing order, we show that only those internal variables have to considered whose relaxation times are greater than the observation time to uniquely specify the macrostate in
. We show how the unique microstate probability is identified. We consider the possibilities of fluctuating (Fl) and nonfluctuating (NFl) work parameter
. It will be convenient to take the parameters to be
fixed so that they are the same for all microstates. We introduce the
Legendre transform of the microenergy
, which proves to be very useful in expressing
. The discussion justifies that once
has been identified in which
becomes uniquely specified, the microstate probabilities are also uniquely specified. No auxiliary step is required to determine
. This is what makes the
NEQT so useful. The discussion is easily extended to consider a microstate that is not unique in
.
So far, we have provided a complete formulation of the
NEQT for any
at each instant. To proceed further to extend the
NEQT for any process, we need to introduce a trajectory ensemble and determination of various path and process quantities, which is taken over in
Section 13. We show that different trajectory quantities have different trajectory probabilities (path microprobabilities), which has not been appreciated so far. This finally provides a complete description of the
NEQT for any process.
We now turn to some of the applications of the
NEQT in the next three sections. In
Section 14, we use it to describe the origin of microfricton at the microstate level. A new NEQ work fluctuation theorem is derived in
Section 15 between any two arbitrary macrostates. In
Section 16, we use the
NEQT to study the quantum and classical free expansion using our work fluctuation theorem. The final section provides a brief discussion of our conclusions and a summary.
4. Internal Variables
Let us consider two noninteracting mechanical systems
and
that form a composite system
, which we take to be isolated. We assume that both
and
are physically “similar” in that each requires the same set of NFl-state variable
having
r components, so separately they are described by Hamiltonians
and
for
and
of
and
, respectively. We assume that the number of particles
and
are kept fixed in the two microstates so their total
N is also fixed for each microstate
of
given by
As the particle numbers are fixed, we do not consider them to be part of the work sets anymore. We choose to express the combined Hamiltonian as
of
, which is a function of
state variables (which includes the microenergies
and
of
and
, respectively), from which we construct the following independent combinations:
so that we can equivalently express
as
of
variables, which excludes
as explained below; here,
and
,
is the total initial work variable set, and
is the new set of internal variables beyond those included in
and
. In addition, the excluded
is the microenergy of
, and carries the suffix
k. The choice of new arguments for
is convenient as it allows it to be expressed as
in terms of the set formed by
variables
of the composite system
, as is also done for
and
. The set of internal variables
denotes the set of internal variables for
.
Manipulating
will change the energy
of
. Thus,
It is easy to check that
is also given by
so both representations of
are equivalent in all ways.
The choice of in terms of and ensures that it vanishes if the two systems form a uniform system for which we must have . However, other choices for can also be made as long as remains independent of .
Let us consider a simple example in which we only allow the energy
E and volume
V for each each system (
). We have
as work variables in forming
. In this case, we have
for the microstate energy and
for the total volume. By definition,
The microstate energy
is a function of three (
) variables. We first consider
. We have for
, using Equation (
81),
where we have used
and
. As
V is NFl,
is Fl over
, as we have learned.
We now use
to express
and
. Differentiating Equation (
104b) with respect to
and
, respectively, and using Equation (
42), we obtain
where
(see Equation (
18)) is NFl, so it has no suffix
k.
As
is an isolated system, it is deterministic. So the observables (
) remain constant, which means that
and
, will remain constant in time. If we allow a mutual interaction so that there is a possible energy (or volume) transfer between
and
, then this will be characterized by oscillating
and
due to energy and volume transfers, respectively, back and forth between the two systems. On the other hand, if the interacting
become stochastic, as discussed in
Section 7, it will obey the second law and
and
will eventually vanish. This case is studied later, where it is shown that macroheat flows from hot to cold.
The above discussion can be easily extended to a composite system composed of
subsystems by the trick proposed by Gujrati in ([
77], Section 3). The trick is very simple. We use the collection
introduced above for the composite system. We consider two such composite systems, and introduce their work parameters
and
, which are used in Equation (
103b) for each one of them. We now treat each as a system so that we have two new systems
and
that form a new composite system
. We use
and
to obtain the new collection of
as introduced above. This set defines a new
for the new composite system, which now has
subsystems. We then treat two such composite systems and treat each as a system to form another new composite system with
, and so on to finally consider a composite system formed of
m subsystems. We thus claim the following:
Claim 10. The internal energy of the microstate of a composite system of m subsystems is a function of the work set composed of their work parameters, and can be expressed as a function ofand a set of internal variables [77]; together, they form the set for the composite system, as shown in Equation (102a). Claim 11. We see that the new combination is the set of internal variables, which also plays an important role in the unique description of the composite system. As the uniqueness is just as important in a thermodynamic consideration, which will be taken up in the following sections, internal variables will play just as important a role there as here.
The above discussion is for a mechanical system with no interaction, but is easily extended to the case in which the two systems are interacting, as will be done in the following sections. The internal variables discussed above relate to a particular microstate
so some of them may carry the suffix
k, and should be denoted as a internal microvariable
. To see this, we recall that the microenergy
carries the suffix
k so any internal variable formed from microenergies of
and
will carry it as was the case for
constructed above. The discussion is also easily extended to include thermodynamics, where the internal macrovariable
obeys the restrictions imposed by the second law; see Equation (
43) and Corollary 1. In this case,
of the
lth subsystem will also include the internal variable
, not to be confused with
for the system. It is clear that the complications due to
are avoided if each subsystem is in EQ so that
’s do not exist, as was the simple example considered above. Then there is a maximum number
of internal macrovariables in
that is determined by
m. This has been discussed in recent publications [
77,
78], to which we refer the reader. By the addition of the suffix, it should be obvious that the above discussion is easily extended to Fl work parameter, such as Fl volume
for
, so that all microstates experience the same pressure
P; see Equation (
18). Thus, the above concept of internal variables is quite general. However, for the notational simplicity, we will not add the suffix to
and
unless needed for clarity by clearly specifying the situation.
5. Fundamentals of the NEQT
In this section, we will usually talk about a system, but the discussion is valid for any body
. The most convenient and most common framework of describing a thermodynamic system
is in terms of the SI-set
of its extensive macroscopic observables, which results in the SI-set
of the generalized macroforces (see Equation (
25)) and the state space
that is sufficient to
uniquely describe the EQ system and its macrostate
. A very important SI quantity in thermodynamics is the entropy
S that in EQ is uniquely determined by
so that
is a state function of
. For an NEQ macrostate
,
S will not be a state function in
, so it will depend explicitly on time. In this case,
no longer forms the set of state variables to uniquely describe
in
, and both
and
S have an explicit
t-dependence; see Equation (
141) for the latter. This is true whether the system is noninteracting (i.e., isolated) or interacting (i.e., interacts with a medium
, which is external to the system
); see
Figure 1.
With respect to microstates
, the interaction between
and
causes MI-exchange
, which is then used to identify
; see Notation (
11a). In general, the SI-change
can be partitioned into
and
in accordance with Equations (
14b) and (
14a), respectively, in which the MI-exchange between
and
is caused by their interaction and
is the change brought about by internal processes within
. In particular,
represents the internal microchange, while
the irreversible macrochange. The SI-force corresponding to
is
; see Equation (
37c). There is no microanalog of
introduced in Equation (
24).
The above discussion is restricted to any
that is uniquely specified in
. In an NEQ macrostate
,
is no longer a convenient state space as it cannot specify
NEQ macrostate uniquely. This loss of uniqueness for
has been a major obstacle in formulating an NEQ thermodynamics that can be as robust and complete as the classical EQ thermodynamics. All competing NEQT approaches belong to
as discussed in
Section 1 and deal only with exchange quantities that can be uniquely described in
, as the medium
is always taken to be in EQ. Thus, they cannot offer any help to overcome the nonuniqueness of
.
We consider this loss of uniqueness to be the main issue in improving our current incomplete understanding of NEQ processes. Our approach to overcome this loss is to describe
in an appropriately
enlarged state space to
by including
internal variable set [
12,
13,
18,
42,
51,
108,
134,
148,
166,
167,
168]
and identifying
as the set of state variables to uniquely specify
. The internal variables also play a very dominant role in glassy and granular materials [
169,
170,
171,
172,
173]. In all previous theories involving internal variables, they are introduced almost in an ad hoc manner without providing any physical insight into their origin. In contrast, our approach to introduce them differs from other approaches by providing a very clear and physical prescription, as discussed in
Section 4. As
describes a uniform system [
33],
invariably requires some sort of nonuniformity, as in a composite system
composed of various subsystems
. At the mechanical level, this nonuniformity is captured by the parameters of the SI-Hamiltonians of
, as was the case with two subsystems in Equation (
99). The internal variables as they appear in Equation (
100) are mathematically required to ensure that the number of independent variables on both sides in Equation (
99) are
exactly the same. While their forms may not be unique, they must be independent. In terms of
, we now have a complete SI-specification of
of
, assuming a certain choice of
. This is the uniqueness we are looking for to develop the NEQ statistical mechanics. As discussed in
Section 4,
cannot be controlled from the outside of
. Therefore, its variation is due to internal processes only and may be controlled by the second law. It should be obvious from the discussion in
Section 4 that
for a purely mechanical system such as
cannot have any connection with the second law. Only in the presence of stochasticity required for a thermodynamic system will its average behavior be governed by the second law, so it also plays an important role in our approach. However, the requirement of including internal variables for a complete specification is a mechanical necessity due to nonuniformity, but becomes critical in the NEQ statistical mechanics. We direct readers to
Section 5.7 for a simple example that clarifies its importance.
In the following, we will be considering the state space
in which the entropy is a state function
so that we will be dealing with
; see Definition 13. This means that
are uniquely defined to specify
. However,
themselves are independent of this particular choice of
, simply because
are determined by the deterministic Hamiltonian of
as discussed in
Section 1, so they remain oblivious to their probabilities. It is this independence of
and
that allows us to develop the
NEQT as a mechanical theory that is modified by stochasticity by extending the conventional similar approach in the
EQT [
33,
54].
Let us consider an infinitesimal change in that takes to both belonging to . If the system always stays within during this change, then the change is carried out along an IEQ process in . It is during this change so that . If intermediate macrostates leave during this change, then the change is not carried out along an IEQ process in . Nevertheless, the microenergy change between and is the same in both situations. In other words, is the same between and , regardless of the nature of the process.
We will focus on an isolated composite system
in microstate
made of two subsystems
in microstate
and
in microstate
; recall Remark 25. Following from Remarks 21 and 26, we now conclude that
In particular, we have
we can use Equation (
37a) for NFl
and Equation (
38) for Fl
, to determine
.
Let us consider one of the above three bodies and focus on its
. For NFl
, the corresponding generalized microforce
is Fl as shown in Equation (
17a). For Fl
, the corresponding generalized microforce
is NFl, as shown in Equation (
18). Including
, which is always FL, we see that
for the body is Fl in the latter case.
As shown in Equation (
20), the BI-microwork
and
defined mechanically as force × displacement in the two cases are the same, and are fluctuating over
as expected due to the ubiquitous Fl microforce and Fl work parameter, respectively. The mechanically defined macrowork
in each case will result in the irreversible macrowork
in accordance with the second law. It follows from Equation (
105) that each side represents a mechanical microwork, showing that even
is a mechanical quantity. It follows from Theorem 6 that
, again emphasizing that
has a mechanical origin. However, the second law puts no restriction on the Fl mechanical microanalog
. For the example of the spring with the force imbalance given in Equation (
82) with NFl
x, the internal microwork is given in Equation (
84) and can be of any sign according to the signature of the internal microforce imbalance
. In the presence of any microforce imbalance (see Conclusion 2) in an NEQ system,
will not vanish, even if its average does. The following Remark emphasizes these points.
Remark 32. The internal microwork within an isolated Σ due to Fl internal microforces or Fl work parameter is ubiquitous.
Its presence has a purely mechanical origin, as seen in Equation (84) or in Equation (78) for NFl . For Fl , because of their mechanical nature, different additive parts of given in (78) are independent of in that they remain the same between and , both belonging to , regardless of the processes between them. Despite this, the macroscopic analogs of each of these parts and are controlled by the second law; see Corollary 1. It follows that in general, determining from SI- will be a convenient way to discuss the statistical mechanics of NEQ systems; see Section 2. We now put down the set of axioms for the formulation of the
NEQT that are in addition to the axioms put forward by Callen [
3]. Callen only discusses a system in equilibrium, so his two most important axioms are about the existence of the entropy function and of the stable equilibrium for EQ macrostates. We extend these axioms to NEQ macrostates below.
Axiom 1. Fundamental Axiom The thermodynamic behavior of a system is not the behavior of a single sample, but the average behavior of a large number of independent samples, prepared identically under the same macroscopic conditions at time .
Axiom 2. Axiom of Entropy Function Existence There exists an entropy function for in any state space, which may be a function of the state variables in that state space and time t.
Axiom 3. Axiom of IEQ Any in can always be turned into a unique in a suitably enlarged state space so the thermodynamic and statistical entropies are identical; see Proposition 1 and Section 12.6 for details.
Axiom 4. Axiom of Stability The unique macrostate for a given is stable in in that the system does not leave it if already there or returns to it if disturbed. A stable macrostate satisfies the stability conditionsIf we consider the matrix formed by ,
or the matrix formed by ,
then all the principle minors of the determinant of must be strictly negative,
or the determinant of must be strictly positive.
By allowing to vary, moves to the most stable macrostate ,
in which all thermodynamic forces (see Equation (76d)) vanish.
We do not consider the stability border in the review.
It is an observed fact that nature, in her inorganic as well as organic forms, is driven towards greater stability. This tendency is just as ubiquitous in physics as it is in biology. Anything in nature that is capable of changing always changes eventually into an unchanging stable form, even in an explosion. This is also true of the Belusov reaction [
51], undergoing oscillations initially but eventually ending into a stable macrostate.
Axiom 5. Axiom of quasi-additivity Any quantity satisfies the principle of quasi-additivity The above axiom also applies to
, the entropy, but requires the following additional axiom of quasi-independence, to be discussed later in
Section 7.3.
Axiom 6. Axiom of Quasi-independence For entropy to be quasi-additive, asrequires the property of quasi-independence (see Claim 7) between different parts of the system.
Axiom 7. Axiom of Reduction All microquantities carrying the suffix and , and associated with and , respectively, must be reduced to microquantities carrying the suffix k under the condition that is in the microstate in order to assess their influence on .
The discussion of the rules for reduction is postponed to
Section 7.4.
5.1. Fundamental Axiom
To avoid any influence of the possible changes in the system brought about by measurements, we instead prepare a large number
of samples or replicas under
identical macroscopic conditions. The replicas are otherwise
independent of each other in that they evolve independently in time. This is consistent with the requirement that different measurements should not influence each other. In the rest of this review, we will use the same term
ensemble to collectively represent the samples. The average over these samples of some thermodynamic quantity then determines the thermodynamic property of the system. As the replica approach plays a central role in our formalism, we state its importance as Axiom 1, which was first proposed in [
79].
Such an approach is standard in equilibrium statistical mechanics [
11,
33,
34,
36,
54], but it must also apply to systems not in equilibrium. For the latter, this averaging must be carried out by ensuring that all samples have identical history, i.e., prepared at the same time
. This is obviously not an issue for systems in equilibrium. We refer the reader to a great discussion about the status of statistical mechanics and its statistical nature by Tolman ([
54], Section 25), where he clearly puts down this viewpoint of statistical mechanics as follows. We quote from p. 65:
“The methods are essentially statistical in character and only purport to give results that may be expected on the average rather than precisely expected for any particular system.....The methods being statistical in character have to be based on some hypothesis as to a priori probabilities, and the hypothesis chosen is the only postulate that can be introduced without proceeding in an arbitrary manner....”
Tolman [
54] then goes on to argue on p. 67 that what statistical mechanics should strive for is to ensure
“...that the averages obtained on successive trials of the same experiment will agree with the ensemble average, thus permitting any particular individual system to exhibit a behavior in time very different from the average;”
see also the last paragraph on p. 106 in Jaynes [
174].
5.2. Parameter Description
As said earlier,
E is
always treated as a
random variable
E taking the values
that fluctuate over
, regardless of how
is treated. The most convenient description of a system is to use the NFl-
so it is the same for all
. Per Claim 3, this results in a random SI-variable
with its outcome
(see Equation (
17a)) fluctuating over
so its ensemble average is the generalized (mechanical) macroforce
; see Equation (
17b). In contrast, the conjugate field
for Fl-
E is fixed.
It is possible to use a
mixed parameter approach. We consider
having two nonoverlapping subsets
and
, with
a NFl-parameter
. The remaining subset
is Fl-parameter set
taking the values
over
. We impose the consistency condition on
(see Claims 3 and 5) so that the corresponding field
; see Equation (
18). For a null set
, we retrieve the field-parameter description in Claim 3. As before, the consistency requires obtaining the same MNEQT, so we must have
see Condition 1.
To clarify the above distinction, we consider the simpler case of NFl-
for a system. The energy
E is a random variable
E taking Fl-values
; their average value is determined by a fixed
; see Equation (
24) and Claim 5. In this ensemble,
and
are fixed so we can also call it a
-
V-
-ensemble. In this case,
, and
are fluctuating over
. If we take
and
, then
, and
are fluctuating over
with
and
kept fixed in this ensemble, which we can call a
-
P-
-ensemble. We can also consider an ensemble with
and
. In this ensemble,
, and
are fluctuating over
;
and
A are kept fixed so we can call it a
-
V-
-ensemble. For these ensembles to represent the same physical system thermodynamically, we must have
, and
in accordance with Equation (
109).
Remark 33. An NEQ ensemble is specified by the set of its NFl quantities and .
5.3. Ensemble of Replicas
The discussion here provides an extension of the ideas valid for thermodynamic equilibrium macrostates
to not only nonequilibrium macrostates
but also to macrostates
. The latter are governed by deterministic dynamics in which microstate probabilities remain constant, as will be justified below; see Claim 12. The premise of the extension to
is that these ideas must be just as valid for them, as they are based on thermodynamics being an experimental science [
79]. Thermodynamics (equilibrium and nonequilibrium) requires verification by performing the experiment many times over. The same premise also applies to
. Therefore, we consider all these macrostates in the following, and simply use
to stand for all these states. We must prepare many copies or
replicas of the system at the same time
t under identical conditions specified by the set of extensive variables
that can be used to also study how the system evolves in time. We identify a replica as simply representing an “instantaneous state” of the system, i.e., one of the microstates
. The collection of all replicas at each instant
t is the ensemble, which is specified by the set
and
. The ensemble then becomes the representation of the macrostate
. Any quantity q
of interest associated with
is then identified as an instantaneous
average over these replicas or samples, and is an explicit function of the set
and possibly
t. For simplicity, we will usually suppress
and only exhibit the explicit dependence on
t in q. By definition, the
ensemble average is given by
where q
is the value of q in the
kth microstate
,
denotes the number of samples in the
kth microstate
at time
t, and
W is the total number of distinct microstates, which we assume is finite right now. We also assume
to be a countable set. It should be obvious that
for the above definition to make sense. The overbar on or the angular bracket around q in Equation (
110) are used to indicate the average q, which is also represented simply as q, following the acceptable tradition in thermodynamics. We will use all three notations to indicate the average in this review as need be.
5.4. Concept of Probability
We now introduce the concept of
ensemble probability
which is valid even if
. As is well-known [
114], the probabilities require the formal limit
, which is going to be implicit in the following. This justifies Equation (
12).
It should be stressed that the concept of probability introduced in Equation (
111) is also valid for a Hamiltonian system with deterministic dynamics. All one needs to do is to prepare an ensemble with a given number
of replicas. As these numbers will not change because the dynamics is deterministic,
will not change.
It should be noted that , and hence the value q on it, depend on explicitly, but may also depend on t explicitly. In general, will be time-dependent as determined by the history of the process. They become history-independent and constant in time t for . As we will soon see, they remain constant in a mechanical evolution of . In this sense, there is a close parallel between and , as discussed below.
The average of the state variable
, using the tradition in thermodynamics, is simply written as
(see Equation (
110)):
here
is the value of
in
. We will also extend this tradition to
in Equation (
40) so that
where, as usual,
is the value of
in
.
Claim 12. The defined above in Equation (111) remains a constant of motion for a deterministic system. This is easy to rationalize as follows. Consider a collection of microstates of a system with copies at some initial time . In a deterministic evolution, ’s do not change, which justifies the above claim.
Definition 25. To distinguish the usage of constant probabilities for deterministic systems with the usage of probabilities for thermodynamic systems, where they may change spontaneously without any external intervention, we will use the term stochastic for this aspect of probabilistic behavior in , but not in .
We clarify this point further. Consider an isolate system that is not in EQ. This means that, according to the Boltzmann principle, not all microstates are equally probable. In time, the system will come to equilibrium by ensuring that all microstates become equally probable. This shows how a thermodynamic system behaves in a way that allows to change in time even without any external intervention. For a deterministic system such as a loaded die, this will never happen even if it is disturbed by the performance of mechanical work, like throwing, an external intervention.
For a thermodynamic system in EQ,
remains invariant (constant) in time. In this regard, such a system is identical to a deterministic system that obeys Liouville theorem [
164], since it is well-known that an EQ system also obeys the theorem [
33]. The reason is very simple. The various members of the above ensemble in EQ occupy various microstates with equal probability with the maximum entropy as shown in
Section 5.5. This entropy remains a constant of motion for the EQ system.
Remark 34. An EQ macrostate under fixed conditions of the surroundings so ’s do not change is no different than a deterministic macrostate , except that the former has a well-defined notion of temperature but the latter has no such notion.
5.5. Statistical Entropy for
We provide a very general statistical formulation of
S for a general system
that is applicable to mechanical as well as thermodynamic systems. It will be shown to be identical to the thermodynamic entropy
S by appealing to the third law. Our derivation demonstrates that the concept of entropy in general is of a
statistical nature. We consider a state
of
at a given instant
t. We focus on a macrostate
of
at a given instant
t, which refers to the sets
and
of microstates and their probabilities, respectively. We consider Fl-
but the discussion is also valid for NFl-
by simply setting
. The microstates are specified by
, which along with
need not uniquely specify the macrostate
. In the following, we will use the set
for
for simplicity. We will also denote
by
so that we can separate out the
explicit variation due to
t in addition to the implicit variation in
t due to
, if any. For simplicity, we suppress
t in
in the following. For the computation of combinatorics, the probabilities are handled as described in
Section 5.4. We follow the notation used there, choosing
with
some large integer constant, and
the number of distinct microstates
in the ensemble or the sample space
spanned by
. We will see that
is determined by
’s having nonzero probabilities [
79]. We will call them
available microstates.
The ensemble
above is a generalization of the
ensemble introduced by Gibbs, except that the latter is restricted to an equilibrium system, whereas
refers to the system in any arbitrary macrostate so that
in Equation (
111) may be time-dependent, and may not be unique. The samples are, by definition,
independent of each other so that there are no correlations among them. Because of this, we can treat the samples in
to be the
outcomes of some random variable, the macrostate
. This independence property of the outcomes is crucial in the following. Each sample of
is one of a microstate in
. They may be equiprobable but not necessarily. The number of ways
to arrange the
samples into
distinct microstates is
Taking its natural log, as proposed by Boltzmann, to obtain an
additive quantity per sample as described in
Section 5.6 (see also Axiom 6), we obtain
and using Stirling’s approximation, we see easily that it can be written as the ensemble average (see Equations (
12) and (
26a)),
of the negative of Gibbs’
index of probability ([
48], p. 16)
We have shown an explicit time dependence in
S, which is distinct from the implicit time dependence in
, to merely express the fact that it may not be a state function in
, i.e., that
may not be uniquely specified in
. The above derivation clearly shows that Equation (
116), which is identical in form to Equation (
26a), justifies the latter for an arbitrary
.
The identification of entropy in Equation (
116) with the Gibbs formulation of entropy is a time-honored practice for nonequilibrium states since the days of Gibbs ([
48] see, in particular, chapters 11 and 12, where time dependence is discussed), and has been discussed by Tolman ([
54], Ch. 13, and in particular pp. 538–539), Jaynes [
174], Rice and Gray [
55], and Rice [
57], to name a few. There is no restriction on
. In particular, they do not have to be given by probabilities valid for equilibrium states; see also Sethna ([
36], Section 5.3.1). The definition merely follows from the observation that the index of probability is an
additive quantity for independent replicas (see
Fundamental Axiom) and that the entropy is merely its average value (with a negative sign). Tolman takes great care in establishing that this formulation of the entropy satisfies the second law ([
54], Section 130). Tolman also shows that the Boltzmann definition of entropy is a special case of the general formulation due to Gibbs ([
54], see the derivation of Equation (131.2)), just as we have argued; see Equation (
208).
The identification of the entropy with the negative of the Boltzmann
H-function ([
54], see p. 561), the latter describing a nonequilibrium state, should leave no doubt in anyone’s mind that the Gibbs formulation of the entropy can be applied equally well to an equilibrium or a nonequilibrium system. Nevertheless, we should point out that not all subscribe to this viewpoint of ours about the Gibbs formulation of entropy, because they insist that the Gibbs entropy is a constant of motion [
135]. This constancy follows immediately from the application of Liouville’s theorem in classical mechanics [
32,
33,
34,
36,
54], valid for a system described by a Hamiltonian, as discussed above and as we have already discussed in
Section 5.4. We thus see that our formulation of the entropy in EQ is consistent with this theorem.
The above derivation is based on fundamental principles of combinatorics and additivity, and does not require the notion of equilibrium or nonequilibrium in the system; therefore, it is always applicable for any arbitrary macrostate
including that of a determining system; see Claim 12. To the best of our knowledge, even though such an expression has been extensively used in the literature for NEQ entropy, it has been used by simply appealing to the information entropy [
72,
175]. Thus, Equation (
116) is a generalization of Equation (
26a) to the general case, and thus justifies it for
. We now generalize Claim 12 as follows:
Claim 13. The probability and the Gibbs entropy (see Equation (26a)) is easy to define for a including that of a deterministic Hamiltonian system. As the probability and the entropy for do not change as a function of time, we show in Section 10.1 that the concepts of microheat and macroheat cannot be associated with a Hamiltonian system, although the concepts of microwork and macrowork are defined. The distinction between the Gibbs’ statistical entropy and the thermodynamic entropy should be emphasized. The latter appears in the Gibbs fundamental relation that relates the energy change
with the entropy change
, as is well-known in classical thermodynamics, and as we will also demonstrate below; see also Equation (
93a). The concept of microstates is irrelevant for this, as it is a purely thermodynamic relation. On the other hand, the Gibbs’ statistical entropy is solely determined by
, so it is a statistical quantity. It then becomes imperative to show their equivalence, mainly because the statistical entropy is based on the Boltzmann idea. This equivalence has been justified elsewhere [
75,
76], and is summarized in the following Remark.
Remark 35. Because of this equivalence, we will no longer make any distinction between the statistical Gibbs entropy and the thermodynamic entropy and will use the standard notation S for both of them for a macrostate , of which is a special case.
Remark 36. The Gibbs entropy appears as an instantaneous ensemble average; see Definition 7. This average should be contrasted with a temporal average
in which a macroquantity q is considered as the average over a long period of timewhere q is the value of q
at time t [33]. For an EQ macrostate , both definitions give the same result provided ergodicity holds. The physics of this average is that q at t represents a microstate of . As is invariant in time, these microstates belong to , and the time average is the same as the ensemble average if ergodicity holds. However, for an NEQ macrostate , which continuously changes with time, the temporal average is not physically meaningful as the microstate at time t corresponds to and not to in that the probabilities and are different in the two macrostates. Only the ensemble average makes any sense at any time t, as discussed in [176]. Because of this, we only consider ensemble averages in this review. A word of caution must be offered. If S is not a state function, it cannot be measured or computed. Thus, while the statistical entropy can be computed in principle in all cases if is known, there is no way to compare its value with thermodynamic entropy in all cases. Thus, no comment can be made about their relationship in general for an arbitrary . We have only established their equivalence for for which the two entropies are the same.
Remark 37. We have summarized our approach for an arbitrary macrostate in Axiom 3, which allows us to identify the two entropies in all
cases. Thus, we only need to investigate the μNEQT for to also cover ; see Section 5.9. 5.6. Principle of Additivity
5.6.1. Additivity
We consider a system
consisting of two nonpenetrating sub-bodies
and
at present, each specified by
and
. Later, we will generalize to any number of sub-bodies
. The principle of additivity states that
is specified by
given by
This principle is self-evident for nonpenetrating systems. For example, the number of particles
remains an identity. (This remains true even if the bodies are interpenetrating, for which the volumes may not be additive). For nonpenetrating bodies, however, their volumes become additive:
which we will assume in this review. We will call the case of nonpenetrating bodies the discrete approach. It is evident that in this approach, the principle of additivity is valid for any number of sub-bodies
. In this case, the sum in the above equations is over all sub-bodies.
We now show that the above sample average in Equation (
110) also follows immediately from the principle of additivity of quantities that are additive; see Claim 2. One considers a very large macroscopic system
of
particles and imagines dividing it into a large number
of macroscopically large and nonoverlapping parts of equal size
N, each representing a microstate of the system
. As the parts are macroscopically large, they will act almost independently; see
Section 7.3 for details. How well this condition is satisfied depends on how large the parts are. In principle, they can be made arbitrary large to ensure their
complete independence. At the same time
t, these parts will be in microstates
of
with probabilities
. The additivity principle states that any extensive thermodynamic quantity
of the system
is the sum of this quantity over its various macroscopically large parts. This principle is consistent with the definition of the average in (
110). One can also think of the
parts as representing the same measurement that has been repeated
times on samples prepared under identical macroscopic conditions at the same instant
t.
5.6.2. Quasi-Additivity
We have enunciated the principle of additivity for
above. The energy
E plays a very different role because of mutual interactions between various sub-bodies. We again restrict to only two sub-bodies for simplicity, which can be later generalized to any number of sub-bodies. We assume that they are weakly interacting so that their energies are
quasi-additive, which we express in a form using
:
where
is the weak interaction energy between
and
, and can be neglected to a good approximation provided
We can extend the discussion to many sub-bodies
, by defining
as the net interaction energies between all of them:
where
is the interaction energy between
and
. The inequality in Equation (
120) can be made as precise as we wish by making
N extremely large compared to various sub-bodies.
Remark 38. With quasi-additivity for energies, we can extend the principle of additivity from toby including quasi-additivity for the energies; see Claim 2. However, the quasi-additivity of the entropy is altogether a different issue. The entropy additivity is strictly valid if
and
are (statistically)
independent [
3], i.e., noninteracting. However, this independence is not of any physical interest as
and
must be interacting with each other for any interesting thermodynamics; otherwise, there is no need to consider
, and the issue of additivity does not arise. Thus, we are inclined to consider them to be quasi-independent. To the best of our knowledge, the discussion of quasi-independence and its distinction from interactions between
and
that are weak has been carefully presented elsewhere ([
148],
was called
there; however,
seems to be more appropriate) for the first time, which we summarize below. The presence of interparticle interactions that determine
E and
for
and
, respectively, results in the thermodynamic concept of
correlation lengths in them. The correlation length
is a property of macrostates, and can be much larger than the interparticle interaction length
a between particles depending on the macrostate. In general,
. A simple well-known example is of the correlation length
of a nearest neighbor Ising model, which increases very rapidly as the critical point is reached, and where it can be much larger than the nearest neighbor distance
a between the spins. Two interacting Ising systems at the same temperature cannot be “independent”, so the additivity of entropy for
is replaced by the following:
where
is a correction term to the entropy due to correlation that is present between
and
due to their mutual interaction. If the linear sizes
l and
of the two bodies are much larger compared to
, then this correlation becomes almost nonexistent. In this case,
can be neglected to a good approximation so that
provided
. Under this condition,
and
are said to be quasi-independent [
148], which ensures that their entropies become quasi-additive. This distinction is usually not made explicit in the literature. Usually,
, but this condition was not used above so the above additivity is valid for any two bodies for which
. For
representing a medium,
has no explicit time dependence as it is assumed to be in equilibrium, and
remains constant for the isolated system
.
The above quasi-additivity principle is applicable to microstates of
as well. We now focus on classical microstates represented by the sub-bodies, and apply the discussion to only two sub-bodies representing
and
forming the isolated system
as they are central to our statistical mechanics. We consider the energies of the microstates
, and
. They are related as follows:
where we have also included the interaction energy
due to
, which is usually negligible relative to
. These energies are independent of the macrostates and, therefore, independent of quantities such as the temperatures and probabilities that specify macrostates of various bodies forming the system. The energies corresponding to their macrostates are related by
see Equation (
119). Again, the smallness of
results in its average
obtained by using
and
in Equation (
112), being negligible relative to
E and
.
Remark 39. The assumption to neglect or merely makes Σ and satisfy the principle of additivity. We will make this assumption in this review extensively.
Remark 40. From now on, we will usually replace the sign “≈” by “=” unless clarity is needed.
Remark 41. Throughout this review, we will think of the above approximate equalities as equalities to make the energies additive by neglecting the interaction energy between Σ and , which is a standard practice in the field, but also assuming quasi-independence between them to make the entropies to be additive, which is not usually mentioned as a requirement in the literature.
5.7. in Internal EQ (IEQ)
The central concept of the
NEQT is that of the
internal equilibrium (IEQ) according to which the entropy
S of an NEQ macrostate is a
state function of the state variables in the enlarged state space
[
134,
148,
149]. The enlargement of the space relative to the EQ state space
is due to independent internal variables [
13,
18,
51,
108], which is sufficient to uniquely specify
in
. We denote such a state by
. The same state cannot be uniquely specified in
or any other extended state space
that does not have the same set of internal variables as in
.
We give a simple example to clarify why and how internal variables are useful for describing an NEQ state. Consider the case of two identical bodies
and
in thermal contact at different temperatures
and
and energies
and
, respectively; we ignore other observables
, etc. Thus,
for each system. We assume that each one is in an EQ state of its own at each instant. Together, they form an isolated composite system
, whose entropy
is a function of two variables at each instant
t, and can be written as a state function in the enlarged state space formed by
(We have neglected the interaction energy
between
and
here per Remark 39.) This situation should be compared with its mechanical analog in
Section 4, and in particular with Equation (
104a) for
; here,
. The discussion there was purely mechanical so there was no dissipation.
We are in a position now to understand how dissipation emerges in thermodynamics. As the system approaches EQ,
so that
. This also means that
, the EQ temperature. The first thing we learn from this simple example is that it clearly shows how the
t-dependence in
can be replaced by invoking an extensive internal variable
so that the entropy can be treated as a state function
in the enlarged state space
spanned by
E and
. In other words, the system is in an IEQ state. In general, we will need to enlarge
by introducing an appropriate number of internal variables to form
in which the system is in IEQ. Thus, we can always express
S in an IEQ state as a state function
in the appropriately enlarged state space
. This is carefully discussed in
Section 12, where we take a different approach. As
and
, being in EQ, have their maximum value for given
and
,
also has its maximum value for given
and
, but this value increases as
, and EQ is achieved. In general,
has the maximum possible entropy for the given
, and continues to increase as
changes and EQ is reached. For this IEQ state, it is trivial to show that the temperature (
; see Equation (
129)) of
is
and its affinity
(see Equation (
133)) is given by
At equilibrium,
and
. Thus,
and
may be very different, yet the system as a whole can be treated as being in IEQ with a
unique temperature
, any temperature difference
between its parts not withstanding. The discussion can be extended easily to the case when the two bodies are in IEQs and also when they are of different sizes. In all cases, a unique temperature in accordance with Equation (
129) can be defined for the composite system [
77,
78]. Once it is determined, we do not have to worry about the internal temperature difference between
and
. Any internal heat transfer between them is captured by
as can be easily verified; here
is the irreversible entropy generation due to macroheat exchange [
51]. We thus see the affinity for
is given by
which vanishes as EQ is reached, a well-known feature [
51] of classical thermodynamics. The analysis clearly shows how thermodynamics brings in dissipation in a mechanical system, showing the consistency of our approach using internal variables.
5.8. Gibbs Fundamental Relations for in and
We first consider the state space
in which
is uniquely specified. In this space, the state function
results in the general form of the
Gibbs fundamental relation
for the entropy, from which follows the Gibbs fundamental relation for
in
spanned by
,
Introducing the SI-temperature
as
and re-expressing the generalized macroforce in Equation (
18) as
we rewrite Equations (
128a) and (
128b) as
in terms of SI macroquantities; here, we have introduced SI-macrowork
as the generalized macrowork
done by the system. The derivative with respect to
determines the
affinity
which vanishes in equilibrium so that
. Thus, in general,
, where
is the generalized macrowork due to
.
Remark 42. Comparing Equation (131) with Equation (93a) allows us to verify Conclusion 1 for the Clausius equality. This equality must be distinguished from
in Equation (
46). Thus, Equation (
93a) allows us to uniquely identify the generalized macroheat
determined by
and the generalized macrowork determined by
to be independent of each other as they belong to orthogonal subspaces in the subspace
; see also
Section 10.2. Both are SI-macroquantities. The resulting thermodynamics has been identified as the MNEQT. In terms of various components of
, the generalized macrowork is
We can identify various components of the macrowork as
using an obvious notation. The missing terms denote the contribution from the rest of the variables not shown, and
are the SI-fields associated with
, with changes
being the changes in it.
In the
, the first law in Equation (
94) refers to exchange macroheat
(see Equation (
46)) and macrowork
in terms of the fields (the temperature
, pressure
, chemical potential
,⋯) of the medium and the corresponding macroscopic exchange quantities in all cases, regardless of the irreversibility. As the medium is in EQ, there is no contribution due to
in
as the corresponding contribution
vanishes due to the fact that the affinity
for the medium. Our sign convention is that
is positive when it is added to
, and
is positive when it is transferred to
.
It follows from Equations (
135a) and (
135c) that the irreversible macrowork, also known as
dissipative work, is
The coefficients
are commonly known as
thermodynamic forces or
macroforce imbalances [
51], which vanish in EQ; see
Section 6.4.
Remark 43. We have included the term associated with N for completeness in Equations (135a), (135c) and (136). We will no longer consider this term anymore. We should compare the above equations with Equation (79). Once or has been identified, the use of the first law allows us to uniquely determine or , respectively.
It is clear that the root cause of dissipation is the macroforce imbalance. It drives the system towards equilibrium [
41,
42,
75,
76,
134,
148,
149,
150,
152,
153]. It arises due to the imbalance between the external and the average internal forces performing work; the microforce imbalance is introduced in the following section. The average force imbalances give rise to an internal work
due to all kinds of force imbalances. The irreversible or dissipated work is given in Equation (
136), which is generated within
.
If we include the relative velocity between a Brownian particle
and the medium to account for the Brownian motion [
148,
157], we must account for [
148] an additional term
in
due to the relative velocity
:
here,
is the change in the linear momentum of the Brownian particle experiencing a macroforce
. To see it, we recognize that
must be nonpositive to comply with the second law. Thus,
must be antiparallel to
and describes the frictional drag. This is discussed in detail in Ref. [
157]. Thus, the force is reviewed in
Section 14 as the role of friction in the Langevin equation turns out to be different in the two NEQ thermodynamics. We will come back to this term later when we consider the motion of a particle attached to a spring; see
Figure 3b, a system also studied by Jarzynski, so that a comparison can be made.
The irreversible macroheat
in all cases is given by Equation (
47), and shows that it does not vanish when
, provided
. This means that the irreversible macrowork is present even if there is no temperature difference, such as in an isothermal process, as long as there exists some
nonzero thermodynamic force or irreversibility. The resulting irreversible entropy generation is then given by
. We summarize this [
51] as
Conclusion 3. To have dissipation, it is necessary and sufficient to have a nonzero thermodynamic force. In its absence, there can be no dissipation regardless of the time dependence of the work process; see also Remark 32. This understanding of dissipation becomes clear from the microscopic source of dissipation in Proposition 2.
5.9. Time-Dependent Gibbs Fundamental Relations for in
We now consider the generalization of the Gibbs fundamental relation for
, which is not uniquely specified in
or
, by starting from Equation (
295a) having an explicit time dependence that comes from “hidden” internal variables
in
. From the state function entropy
for
in
, we have
where
is the work variable in
. Expressing the last term as
we obtain the following generalization of the Gibbs fundamental relation for
in
:
where
Definition 26. As the presence of above in is due to “hidden” internal variables in , we will call it the hidden entropy generation rate
, and the hidden entropy generation.
It results in a hidden irreversible macrowork
in due to the hidden internal variable with affinity . In
, we can identify the temperature
T as the thermodynamic temperature in
by the standard definition. It is clear from the above discussion that
in
has the same value as
in
. However, there is an alternative definition of a temperature for
in
as
while
for
in
. It is easy to see that they are not the same as macroheats
and
are not the same as macroworks. Thus, this definition is not a thermodynamic temperature for
in
. Therefore, we are now set to identify
(see also Equation (
257)) as a thermodynamic temperature of
by this
T.
Remark 44. in is identified by the same derivative in the Gibbs fundamental relation in as follows:while the alternative nonthermodynamic temperature satisfiesas is easily verified. Remark 45. As discussed above and as will be discussed in detail in Section 12.1, a macrostate with can be converted to with a state function in an appropriately chosen state space by finding the appropriate window in which lies as well. The needed additional internal variable determines the hidden entropy generation rate in Equation (138b) due to the non-IEQ nature of in , and ensures validity of the Gibbs relation in Equation (138a) for it, thereby not only providing a new interpretation of the temporal variation of the entropy due to hidden variables but also extending the MNEQT to in . The above discussion strongly points towards the following possible proposition.
Proposition 1. The MNEQT provides a very general framework to study any in , since it can be converted into a in an appropriately chosen state space , with originating from hidden internal variable .
We now consider a process to be studied in . It is natural to think of at least the initial macrostate of as being uniquely identified as in . During the process, along may turn into or remain . The former has been studied above. The latter can happen under the following two cases:
(i) all internal variables in remain out of equilibrium;
(ii) internal variables in a subset have equilibrated so that the affinity vanishes.
In both cases, remains in , except that in (ii), can also be treated as in the proper subspaces between and , with defined by . Even though in these subspaces so that and , the Fl microaffinity in these subspaces, and will still play an important role in the NEQT. Therefore,
Remark 46. We will use the state space to construct the NEQ statistical mechanics in (i) and (ii) without affecting the hidden entropy generation and hidden irreversible macrowork. This allows us to use over the entire process.
Remark 47. In a process resulting in in , it is natural to assume that the terminal macrostates in are so the affinity corresponding to must vanish in them.
The above discussion can be easily applied to consider the case , in which internal variables in a subset of have equilibrated. The result is summarized in the following:
Remark 48. By replacing by , and by , we can also express the Gibbs fundamental relation for any NEQ macrostate in asby treating as in . In an NEQ process between two EQ macrostates but resulting in between them in , the affinity corresponding to ξ must vanish in the terminal EQ macrostates of . Equation (
141) proves extremely useful to describe
in
as it may not be easy to identify
in all cases.
Remark 49. The explicit time dependence in the entropy for in or in is solely due to the internal variables, which do not affect the validity of the Clausius equality (Equation (45)), with T defined as the inverse of at fixed or in the two state spaces, respectively; see Equation (129). As a consequence, Equation (47) remains valid for any . 5.10. Consequences of the Second Law
Theorem 4. As a consequence of the second law, the irreversible macrowork (see Equation (136)) which is equal in magnitude to the macroheat (see Equation (95)) for any is nonnegative in any real process. Proof. Using Equation (
47), we find
where the inequality follows from the second law
in Equation (
67c); we assume
T and
to be nonnegative. Therefore, each of the two independent contributions in each equation must be nonnegative. This thus proves that
☐
Corollary 1. Different components of and for any must be individually nonnegative.
Proof. Consider the independent components such as , etc., of . As is nonnegative, each component must be nonnegative. □
This proves the inequalities in Equations (
43) and (
80). In addition, it shows that each term on the right in Equation (
75) is nonnegative. We thus have a proof of a part of Remark 32 that deals with the consequences of the second law.
Proof. The corollary follows from the preceding theorem. □
The first inequality merely states the well-known fact of thermodynamics that macroheat flows from “hot” to “cold”. The second inequality also states a well-known fact about the stability in thermodynamics, which requires the entropy to increase with temperature. As EQ is reached, either from above () or from below (). In the former case, S decreases, while it increases in the latter case.
Corollary 3. For an isolated system or for , Proof. Setting
for an isolated system or
in Equation (
142) proves the theorem immediately. □
The inequalities in Equation (
142) follow from the second law
in Equation (
67c). Each term on the right side, being independent of each other, must be nonnegative separately, which yields
as consequences of the second law. In view of Equation (
95), the last inequality above proves the last two inequalities in Equation (
69).
5.11. Assumptions
We list the two important assumptions of our approach. They can be relaxed but we will not do that in this review.
5.11.1. N Fixed for
In order to fix the size of
, we need to specify one of its extensive state variables. Usually,
N is kept fixed to ensure a fixed size. Therefore,
N is not considered part of
and
from now on [
177]. This also means that (i) there is no chemical reaction, and (ii) there is EQ with respect to the chemical potential. Most of the time, we will simplify the discussion by using a single internal variable; the extension to many internal variables is trivial.
Our primary interest is in studying an irreversible process
, which in MNEQT requires the existence of
thermodynamic forces [
51]. Their absence signifies that
represents a reversible process. It should be stressed that our notation is designed in such a way that the investigation can also apply directly to the (isolated) NEQ system
, if need be, for which no exchange with the outside is possible. In that case, the external driving must be replaced by
spontaneous processes going on within
that
drive it towards equilibrium. During this drive, there is dissipation within
that is found to contribute to work fluctuations in the
NEQT. As is well-known, such spontaneous fluctuations are not directly captured in the
NEQT, the microstate extension of the
. This makes our approach superior.
5.11.2. Always in EQ
We will assume
to be always in equilibrium (which requires it to be extremely large compared to
, as noted above). Any irreversibility going on within
due to internal dissipation, internal motion, internal nonuniformities, etc., is ascribed to
alone. Moreover, we assume additivity of volume, a weak interaction between, and quasi-independence of,
and
; the last two conditions, respectively, ensure that the energies and entropies are additive [
75,
76,
134,
148,
149] but also impose some restriction on the size of
in that it cannot be too small. In particular, the size should be at least as big as the correlation length for quasi-independence as discussed there. In this study, we will assume that all required conditions necessary for the above-mentioned additivity are met.
8. Properties of Entropy for
We follow
Section 5.5 closely. The maximum possible value of
for given
occurs when
are
uniquely specified in
. This makes
a state function
of
with no explicit time dependence. Thus,
The simplest way to understand the physical meaning is as follows. Consider
at some time
t. As
may not be a unique function of
, we look at all possible entropy functions for this
. These entropies correspond to all possible sets of
for a fixed
, and define different possible macrostates
. We pick that particular
among these that has the
maximum possible value of the entropy, which we denote by
or
without any explicit
t-dependence. This entropy is a
state function . For a macroscopic system, this occurs when the corresponding microstate probabilities for
are
equally probable (ep):
so that
We wish to point out the presence of nonzero probabilities in Equation (
206a) that explains the comment above of
available microstates. Including microstates with zero probabilities will not correctly account for the number of microstates with given
.
Remark 53. All microstates in are equally probable as seen in Equation (206a), which makes the most probable macrostate
for the given . Once in , the body will have no memory of its original macrostate, which may not be in IEQ, from which it arises due to evolution in time. There is an alternative to the above picture in which we can imagine the with fixed , which essentially “isolates” and converts it into a . Then, as t varies, its entropy increases until it reaches its maximum value ; see also Proposition 3.
Remark 54. We emphasize that so above in Equation (206a) is determined by the average energy E and not by the microstate energy , as derived later in Section (Section 12.2). The in Equation (206a) replaces the actual probability distribution in Equation (275) by a flat distribution
of height and width , a common practice in the thermodynamic limit of statistical mechanics [33]. Therefore, there in no fluctuation in . Despite this modification, the entropy has the same value for a macroscopic body so β and are given by Equations (129) and (17b), respectively; see also Section 12.2. Let us consider a different formulation of the entropy for a nonunique macrostate
specified by some
at some instance
t. This macrostate provides a more incomplete specification than in
. Applying the above formulation to
, and consisting of microstates
forming the set
with probabilities
, we find that
is the entropy of
; here
is the number of distinct microstates
. It should be obvious that
Again, under the equiprobable (ep) assumption
denoting the sample space spanned by
, the above entropy takes its maximum possible value
which is the well-known value of the Boltzmann entropy for a body in equilibrium
and provides a statistical definition of, and hence connects it with, the thermodynamic entropy of the body proposed by Boltzmann [
46,
47,
131]. The maximization again has the same implication as in Equation (
205): For given
, we look for the maximum entropy at all possible times. It is evident that
Thus, the NEQ entropy
as
, the equilibration time, reduces to
in EQ, as expected. Before equilibration,
in
remains a nonstate function
in
, where we do not invoke
. It is the variation in
that is responsible for the time variation in
. A simple proof of this conclusion is given in
Section 12.6; see Remark 48 also. We can summarize this conclusion as
Conclusion 4. The variation in time in in is due to the missing set of internal variables ξ.
We now revert back to the standard use of
, and
. Let us consider an isolated body
out of equilibrium so that its macrostate
in
spontaneously relaxes towards
at fixed
. Its entropy
has an explicit time dependence, which continues to increase towards
. For such NEQ macrostates, the explicit time dependence in
is explained by introducing
to make their entropies a state function in an appropriately chosen larger state space
[
148] as explained later in
Section 12. It is also shown there that an NIEQ macrostate with entropy
may be converted to an IEQ macrostate with a state function entropy
by going to an appropriately chosen larger state space
spanned by
with
its proper subspace. Therefore, in most cases of interest here, we would be dealing with a state function and usually write it as
, unless a choice for
has been made based on the experimental setup, as discussed in
Section 12. In that case, we must deal with a pre-determined state space
so that some NEQ macrostates that lie outside
have their entropy of the form
in
as we cannot use the larger state space
.
It should be clear now that the explicit time dependence in an NEQ macrostate in
with a nonstate function entropy
is due to additional state variables in
and that this NEQ macrostate may be converted into an IEQ macrostate with a state function entropy
by going from
to an appropriately chosen larger state space
. Similarly, an NIEQ macrostate
in
with a nonstate function entropy
is converted to
in an appropriately chosen larger state space
with a state function entropy
. The additional internal variables
in
that are over and above
in
give rise to additional entropy generation as they relax for fixed
. This results in the following inequality:
However, if the choice for
has been made based on the experimental setup and the observation time
(see
Section 12), we must restrict our discussion to
so that we must consider
in
the following. This will be done in
Section 12.6; see Remarks 45 and 48.
8.1. System in a Medium and Quasi-Independence
The above formulation of
can be applied to
, and
. We assume that
, and
are quasi-independent so that
can be expressed as a sum of entropies
and
of
and
, respectively:
This follows immediately from Definition 28 and the observation that three entropies are given by the same formulation as in Equation (
26a).
In the derivation of the above additivity (see [
148]), we have neither assumed the medium nor the system to be in internal equilibrium; only quasi-independence is assumed. The above formulation of the additivity of statistical entropies will not remain valid if the two are not quasi-independent. From this, we also conclude that the entropy additivity will not be true in the absence of quasi-independence.
8.2. Second Law Postulate of NEQ Entropy S
The uniqueness issue about the NEQ macrostate says nothing about the entropy of an arbitrary (so it may be nonunique) macrostate
, which is
always given by the Gibbs entropy in Equation (
26a), as derived in
Section 5.5; see also [
72]. In the demonstration,
is not required to be uniquely identified. This entropy satisfies the
law of increase of entropy, as is easily seen by the discussion by Landau and Lifshitz [
33] for an NEQ ideal gas [
194] in
to derive the equilibrium distribution. Thus, the form in Equation (
26a) is not restricted to only uniquely identified
’s. We now enunciate the central theme of the NEQT, known as the Second Law.
Proposition 3. The Second Law The NEQ Gibbs entropy of an isolated system is bounded above by its equilibrium entropy and continuously increases towards it so that [33] This proposition is not a part of our axiomatic formulation so it needs to be
justified within this formulation. We will do so below by two independent approaches. The second law in standard textbooks is usually stated to be applicable to the universe as a paradigm of an isolated system [
195]. However, the universe here cannot represent the entire physical universe as this creates many unsolved issues [
196]. Therefore, we will interpret the universe as a causally bounded region of space, which we treat as an isolated system [
197], for which the above law applies; see also [
162,
195].
8.3. A Proof of the Second Law
The second law has been proven so far under different assumptions ([
54,
57,
79,
174,
176], among others). Here, we provide a simple proof of it based on the postulate of the flat distribution; see Remark 54. The current proof is an extension of the proof given earlier; see ([
79], Theorem 4). We consider an isolated system
for which the second law is expressed by Equation (
213) so we must use the state space
. For simplicity, we suppress the suffix 0 from all the quantities in this section. As the law requires considering the instantaneous entropy as a function of time, we need to focus on the sample space at each instant to determine its entropy
S as a function of time. At each instance, it is an ensemble average over the instantaneous sample space
formed by the instantaneous set
of available microstates in
; see Equation (
26a) or (
116). This should make it clear that our approach has nothing to do with ergodicity, which requires averaging any quantity defined for a
single microstate at each instant over a very long time period; see Remark 36. The sample state
in the ergodic hypothesis always contains a single microstate. Thus, the issue of any ensemble average at each instant does not arise. In addition, the ergodicity principle deals only limiting average over an extremely long time evolution over
. In our approach, we are averaging over the set
in
of available microstates at each instant to determine the entropy
as a function of time, which is what is required for the second law formulation in Equation (
213). As we are only interested in the behavior of the entropy at each instant, we will use the flat distributions for the microstates at each instance (see Remark 54) so that the entropy is given by Equation (
206b).
To prove the second law (see Proposition 3), we proceed in steps by considering a sequence of sample spaces belonging to
as follows [
79,
176]. At a given instant,
happens to be in some microstate. We start at
, at which time it happens to be in a microstate, which we label
. It forms a sample space
containing
with probability
, with the superscript denoting the sample space index. We have
. At some
, the sample space is enlarged from
to
, which now contains two macrostates
and
, with probabilities
and
, respectively. The enlargement is due to the one-to-many mapping discussed in
Section 1 and expressed in Equation (
6). At
,
randomly evolves into a different
. As explained above, we need both microstates at
to determine the entropy. Using the flat distribution, the entropy is now
. At some
,
is enlarged to
containing three distinct microstates
, and
so that the entropy becomes
. At some
, the enlarged sample space will include three distinct microstates
, and
so that the entropy becomes
. We just follow the system in a sequence of time so that at
, we have a sample space
containing
n distinct macrostates so that
. Continuing this until all microstates in
have appeared, we have
.
We now discuss the significance of using flat distributions at each time
t so we can apply Bolzmann’s formula
for the entropy, called
Boltzmann’s principle [
198] by Einstein; see Equations (
206b) or (
209). Their use means that we are neglecting fluctuations in the temporal entropy
when the instantaneous distribution is not exactly a flat distribution. As fluctuations are overlooked in thermodynamics, use of this distribution gives the entropy of the
most probable macrostate at each
, with
. In contrast, Gibbs formulation provides the entropies of instantaneous macrostates with
that may be different from a flat distribution that occur during the period
. These macrostates give rise to fluctuations that happen between
and
, and have been investigated earlier [
79].
We now make a very important observation that shows how our proof differs from the approach involving the extremely special assumption of
molecular chaos [
93] made by Boltzmann to establish the H-theorem for the evolution of
to
; see also
Section 1 for a brief historical review. The theorem uses the Boltzmann kinetic gas equation for the single-particle distribution
along with the molecular chaos assumption, a probabilistic concept. Boltzmann recognized that the assumption is central to derive irreversibility. To date, there has been no convincing argument to justify the assumption, which is not surprising as there are examples, such as the velocity inversion in spin-echo experiment or Zermelo’s paradox [
92], where the assumption and the H-theorem fail. If that happens, it will not be possible to distinguish between reversible and irreversible processes, as argued by Prigogine [
199]. Lanford [
200] has shown that the H-theorem is valid not only under the molecular chaos assumption (no correlations), but also only in the limit of vanishing particle size and density. Kac [
201] argued that the unjustifiable assumption must not be used for the derivation of the very general law of the increase in entropy. This is understandable as “... it has never been possible to extend Boltzmann’s argument to wider classes of systems. A quite different point of view thus has to be adopted...”, to quote Henin and Prigogine [
202]. By investigating Kac’s ring model, Fernando [
79,
94] observed that the molecular chaos assumption is not unique for irreversibility to emerge, contradicting the above claim of Boltzmann about its centrality. It is important to emphasize that Boltzmann’s molecular chaos cannot handle many-particle interactions. Boltzmann seems to be completely unaware of these shortcomings. Considering all these limitations, we come to the following:
Claim 17. The molecular chaos assumption can neither be taken seriously to prove the second law nor extended to all cases of interest such as to deterministic microstates that form the basis of the μNEQT.
The most common approach to overcome the above limitations is to assume master equations [
54] to justify this theorem instead of assuming molecular chaos [
54,
55,
56,
57,
58]. We avoid both of these assumptions, which are probabilistic in nature. It is important to emphasize that Boltzmann’s molecular chaos cannot handle many-particle interactions so such a concept is not applicable to the deterministic microstates (see Definition 4), which are our concern. Instead, we use the Boltzmann formulation, the Boltzmann principle [
198], of the entropy in terms of just the number of distinct microstates not only at EQ (see Equation (
209)) but at all times
. As microstates
are determined by the deterministic Hamiltonian of the system including all of the inter-particle interactions, they are independent not only of each other, but also of
; see Definition 4. This means that as
probes more and more microstates, there is no correlation among them. Because of this, we are able to avoid the shortcomings of molecular chaos, which is avoided as said above in Claim 17. The microstates appear
randomly, so which ones appear and the order of their appearance are also random. Despite this, the number
is an integer, not a random variable, and determines the instantaneous microstate probabilities
of their frequency of appearance at
t; see Equation (
111).
Proposition 4. The microstate number for the isolated system is a pure number that increases monotonically with t, whether we start counting them from () or some time (). It is oblivious to which ones arise and their order, which are required to determine .
Proposition 5. The number of distinct microstates passed by the system past cannot ever decrease.
Remark 55. Propositions 4 and 5 are self-evident.
The above proof of the second law is simply based on the idea of how microstates accumulate in time, as given in Proposition 4. In time, the system will pass through more and more microstates with a concomitant increase in the entropy , assuming flat distributions. Eventually, at , all microstates will have appeared once, and their number is the total number of distinct microstates of the isolated system. This results in the maximum entropy .
For a macroscopic system, the probability of a microstate repeating itself initially for is negligible, being of the order of . Thus, initially all microstates are almost distinct and give rise to flat distributions at each t as used above. However, we note that during this period, there will be fluctuations in the entropy when we do not have a flat distribution. However, as we are not concerned with fluctuations in thermodynamics (they are important in statistical mechanics), the flat distribution is quite appropriate. For , some microstates begin to occur more than once, and we will again have fluctuations, which we have disregarded in the proof. At , almost all microstates will have appeared twice but we still have so that the entropy remains at its maximum value for all .
We now have the following:
Theorem 8. Under the assumption of flat distributions, Proposition 4 forms the basis of the second law of thermodynamics for the isolated system that is monotonically increasing until it reaches its maximum value at .
Proof. See the discussion above. □
The issue of fluctuations has been discussed at length elsewhere ([
79], Figure 6 and its discussion), which shows that the second law is an average law having fluctuations that become insignificant as the size of the system becomes larger and larger. Thus, it is conceivable that in some isolated cases, the second law is violated and the entropy decreases over a finite period of time. But this will not happen in the majority of cases for a macroscopic system. In other words, in most of the experiments, the chance of observing a violation of the second law is extremely low, almost negligible, to the point that we would never observe such an event in our lifetime [
203], which also shows a deep connection of the second law with causality.
We defer the critical discussion of this issue to the next section. Here, we only discuss its very small possibility. It should be noted that Maxwell [
50] had proposed a device involving his famous
demon that is capable of violating the second law. As the violation is not considered a physical reality, it is termed the
demon paradox that needs to be explained. Various attempts have been made to clarify the paradox. Szilard [
68] proposed the cost of information to clarify the paradox. Later, Brillouin [
69] showed that the demon is not capable of violating the second law by carrying out a careful analysis by taking into account a light source to help the demon see and sort molecules. Without light, the demon cannot sort out molecules. Similarly, Smoluchowski [
89] also argued that the demon cannot violate the second law by taking into account thermal fluctuations. More recently, we have also investigated the demon paradox and used internal variables [
204] and probability arguments [
205] to explain it. The investigation of the demon paradox and its successful explanation is clear evidence that any so-called violation of the second law is a consequence of an incomplete or improper analysis; see also Kostic [
206] and Norton [
207].
As part of our attempt to demonstrate temporal asymmetry or inhomogeneity, we need to show why this probability should be so small. As an example, we consider the demon paradox. Let
, where
is the energy of a particle. Let a very small but nonzero positive quantity
be the limit of the demon’s precision so that it treats all the particles with
x in the window
as particles identified by
as the particles with most probable energies (around the mean
, and the standard deviation
). It also treats particles with
as slow particles
, and particles with
as fast particles
, respectively. We consider
, and
. As the demon observes many slow and fast particles, we need to consider the probability distribution
of
of independent and identically distributed random variables
of the
ith particle [
205]. It is found that
which is ≈
. Therefore, fast and slow particles have extremely low probabilities, and make no difference in determining the temperature, which is determined by
alone. The example clearly shows that thermodynamics is governed by the most probable state, so the demon is not successful in creating a temperature difference. As
cannot decrease with time, there is no possibility of observing a violation of the second law with appreciable probability. Indeed, we show in
Section 9 that the violation will invalidate Axiom 4, which is the cornerstone of the stability observed in nature.
In any case, the
probabilistic interpretation needs to be exploited, as we do here, for a proper understanding of the second law, which merely states that it is nothing but the reflection of the
most probable event in probability theory [
114]. To appreciate this, we note the Gibbs formulation [
48,
54,
55,
57] of the entropy
in Equation (
26a) for an isolated system. These probabilities are continuous functions of time and ensure that
is a continuous function of
t. How these probabilities are to be determined or defined has been analyzed earlier [
79,
176], where we have discussed two possible approaches, the ensemble-based and the temporal-based, to define these probabilities. Both are standard approaches [
33] and their equivalence is needed for establishing ergodicity. Determining these probabilities is discussed in
Section 12.2. As shown by Tolman ([
54], Section 106, where Boltzmann’s
is considered), Rice and Gray ([
55], see Section 3.3), Rice ([
57], Ch. 17), and several other authors, this entropy for an isolated system
cannot decrease with time. This expected behavior, which is in accordance with the second law, is shown by the curve OA in
Figure 4. If we perform time-reversibility operation (
) at
, the entropy will follow OB, and not the continuation of AO to negative
t. The increase along OB as
decreases follows from the accumulation of microstates used above to prove the second law. If, instead, the time-reversibility (
) is performed at some instance
at O
, then the entropy will follow O
C; it most certainly does not follow O
O, the continuation of AO
for
. Thus, the second law shows temporal asymmetry.
For a reversible process, the entropy of each macrostate
of a body along the process is a state function of
, but not for an irreversible process for which
. Their entropies are written as
[
75,
76] with an explicit time dependence. In general [
33,
75,
76,
79],
The equilibrium values of various entropies are always denoted with no explicit time dependence, such as by for . These entropies represent the maximum possible values of the entropies of a body as it relaxes and comes to equilibrium for a given set of observables. Once in equilibrium, the body will have no memory of its original macrostate; compare with Remark 53. Being observables, the set , which includes its energy among others, remains constant for as it relaxes. This notion is also extended to a body in internal equilibrium.
Thus, we have proven the second law in accordance with Proposition 3 without any unsubstantiated approximation.
8.4. Second Law as a Consequence of Stability
A careful reader should have noted by now that all we have done is to use inequalities resulting from the second law, but we have not postulated anything, either by itself or as a part of Axiom 2 in our axiomatic formulation of the
NEQT and the MNEQT. We now wish to
emphasize that there is no need to do this, which clarifies its absence. In this regard, we deviate from Callen [
3] for MEQT, who uses it as part of his Postulate II. The reason is that, as demonstrated below in Theorem 9, it is a direct consequence of Axiom 4, which is an extension of Postulate I of Callen to NEQ macrostates
.
To show this, we consider
embedded in
, the latter in EQ, so it is specified by its macrofields
, etc. We assume
not in EQ with
, so the differences in their fields are given by
in Equation (
76d). In view of Remark 45, we use
in which
happens to be
. We now prove the following:
Theorem 9. The second law is a direct consequence of the requirement of the Stable Equilibrium (Axiom 4) for a thermodynamic system.
Proof. We recall Claim 9, and apply it to any
in
. Using Axiom 4, we conclude that
must approach the stable EQ macrostate
, which requires
which can be expanded to
We now rewrite the second equation in Equation (
142) in the following form:
where we have used inverse temperatures, and
is given explicitly in Equation (
136), which we reproduce below:
having various contributions in
. The first two terms refer to irreversibility caused by exchanges with
, similar to the exchange macroheat term in Equation (
215), and the last term refers to irreversibility caused by internal processes.
The first term in Equation (
215) represents the stochastic contribution and the second term is the mechanical contribution. We analyze each term separately. Let us assume that
(
). For
,
Σ must lose energy in the form of exchange macroheat with
so
, which means that the resulting irreversible entropy
. We now turn to the mechanical contribution in Equation (
216), and consider various terms in it. For the first term
, we assume
. This means that the volume of
Σ will increase in accordance with the laws of mechanics. This results in the corresponding irreversible entropy
We assume
for the second term. This means that
to bring μ closer to
until
. The corresponding irreversible entropy
Similar arguments apply to missing terms in
. This brings us to the last term in
. To be specific, we consider the middle term
in Equation (
137) as an example of this term; here,
is the change in the linear momentum of the Brownian particle experiencing a macroforce
, and
is its relative velocity with respect to the center of mass of the system [
157]; see also Equation (
320a) later. The stable EQ corresponds to a vanishing relative velocity so that there is no motion. For this to happen, the macroforce
must oppose this motion as happens in mechanics. Consequently, the corresponding irreversible entropy
. As a second example, we consider the macroaffinity
obtained in Equation (
104c). It is given by
With
given in Equation (
104a), and by a straightforward manipulation, we find that
which is precisely the first term in
above so it is also nonnegative; see Equation (
217a).
Claim 18. The exercise to obtain Equation (218) also shows that the affinity term in in Equation (216) behaves identically to other mechanical terms under the condition of stability. Finally, the sum
of all these irreversible entropies follows the inequality
which is the statement of the second law for an interacting system. For an isolated system, it reduces to Proposition 3, codified in Equation (
213). □
Remark 56. The form of the first two terms in in Equation (216) is not the most general form. From Equations (76b) and (76c), the most general form of the missing term isin which the first term is due to exchange displacement as the first two terms in Equation (216), and the second term is due to the irreversible internal displacement as the last term in Equation (216). It follows from Claim 18 that both terms above give a nonnegative irreversible entropy contribution, which makes Equation (219) a general result. Conclusion 5. The above theorem shows that there is no need to include the second law as an additional part of Axiom 4 in the axiomatic formulation of the MNEQT. In this sense, the second law is not a fundamental law in our formulation; it is merely a consequence of Axiom 4.
The above discussion now justifies that stability requires that the energy be a convex function upwards and the entropy a convex function downwards as shown in Equation (
106) for Axiom 4.
15. An NEQ Microwork Fluctuation Theorem in
As an important application of the
NEQT, we derive an NEQ microwork fluctuation theorem for an arbitrary macrostate
. This should be contrasted with the fluctuation theorem proposed by [
142,
143,
144], which is restricted between two EQ macrostates. We will follow the method that we have proposed earlier [
150,
151]. As is usual, we take the set
to be countable infinite. We also consider
to be NFl, but the discussion is easily extended to Fl
. The Legendre-transformed microenergy
(see Equation (
295b)) for an arbitrary macrostate
changes as
changes due to varying
during a process
between
and
, but
k does not change. The microenergy change along a trajectory
during
between
and
is related to the mechanical microwork
we use Equation (
160) for
. Being mechanical,
is independent of
. By definition,
with
defined in Equation (
23b). We finally conclude that
Conclusion 13. If we are interested in knowing the cumulative change , we only need to determine by following the same mechanically along during . The probability plays no role as is a microstate function,
i.e., is a difference between the Legendre-transformed microstate energies of the terminal microstates and , and not of the actual trajectory ; see Equation (336). Thus, it is not a process microquantity. Remark 71. It should be stated here that is the same for all different processes ’s between the same two arbitrary macrostates and so that they all share the same set of trajectories between and (see Definition 5), soalthough Fl is not a process quantity. The internal microwork, which is a Fl process microquantity, iswith defined bysee Equation (157). The latter is also a process macroquantity, but is NFl as it is the same for all ’s. What the above remark implies is the following. Different processes between the same two macrostates and differ not in but in so the Fl is the same for all processes involving , or . This means that we can determine for some process between and such as an EQ process between and . Then, the same will also describe any possible . On the other hand, is NFl (over ) but depends on the process, and will have to be determined for each one of them separately. This makes the generalized microwork or unique in that it does not depend on the nature of so dealing with it is simpler. Despite this, as it is Fl, it contains the contribution of dissipation in it given by the average , as we will demonstrate below.
Before demonstrating this, we make the following observation. The property of a quantum
maintaining its identity during
is because we have assumed
to be a singlet; see Remark 5. If
is degenerate, it can be, without any intervention from the medium, transformed into any of them without changing their microenergies. The important fact to remember is that transformations among degenerate microstates happens in both ways so they do not affect their probabilities. This is no different for a classical microstate
; see Definition 4. This microstate changes from
to
as it evolves in time following its Hamiltonian dynamics, both having the same microenergy so the dynamics relates microstates on the same energy shell just like the degenerate microstates above. The Hamiltonian dynamics also does not change
. In both mechanics, the deterministic dynamics causes no problem as the change
is not affected by any stochasticity in the evolution. It only changes due to work variables; see Conclusions 11 and 12 for more details. In this case, introducing
we can write
as in Equation (
336). Thus, whether we are considering a classical system or a quantum system, we can always express
as in Equation (
336).
We now consider a process
taken by
between two arbitrary macrostates
and
having
and
as respective NEQ partition functions (see Equation (
283)), as the work parameter varies from
to
. The inverse temperature in the terminal macrostates is
, which may be different from
of the medium. As a special case, the terminal macrostates can refer to EQ macrostates, so they are included in our analysis below. In this case,
in the terminal macrostates, and will be considered below.
We now introduce the following exponential microwork average:
involving Fl microworks
; here,
refers to a special averaging with respect to the initial probabilities given in Equation (
295a) at time
:
of the initial macrostate
. This particular averaging was first introduced by Jarzynski in deriving what is commonly known as the Jarzynski equality (JE) [
142,
143,
144] in the
NEQT. We will return to the equality latter; see the discussion leading to Equation (
345).
Let us evaluate the particular average
in Equation (
339) using Equation (
336). We have
which leads to
where
and
are final Legendre-transformed energy and the NEQ partition function for
. Introducing the thermodynamic potential energy difference
, we finally have
This is our new microwork theorem involving Legendre-transformed microworks
. We can re-express the above equation in the following form:
Recall that
in the exponent on the left is nothing but
, where we have introduced a temperature-like quantity
by the following relation
We thus see that the exponent on the left contains information about the entropy change
, so
contains information about
.
Remark 72. The macrostates between and in used above need not belong to the state space .
Instead of an NEQ process between arbitrary macrostates, we now focus on an arbitrary process between
and
, each in a canonical ensemble discussed in
Section 12.7. In this case, we need to set
for the terminal macrostates, and use
given in Equation (298); here,
is the initial equilibrium partition function for the system at inverse temperature
, and
is the initial EQ microstate energy in
. As we are in space
, we must set
so
reduces to
for the terminal macrostates; see Equation (
11a). In essence, this means that we do not need to consider any Legendre-transformed quantity in our discussion. Thus,
in Equation (
339) is replaced by
in terms of the microworks
. It is easy to see that Equation (
340a) is replaced by
in terms of the free energy difference
. This is our new work theorem involving microworks in the canonical ensemble.
On the other hand, if following Jarzynski [
142,
143,
144] we use
in place of
in
and evaluate the microwork average (we now add another suffix “e” as a reminder of the exchange microworks) introduced by him, we find that
simply reduces to
which is a purely MI-quantity, so it provides no information about the possible irreversibility in the system. This conclusion is very different from that arrived at by Jarzynski, who derived the Jarzynski relation (we now add another suffix “J” as a reminder of his evaluation)
by using the conjecture in Equation (
7) mentioned at the end of
Section 1.1. The conjecture and its consequence for the concept of NEQ work have generated fierce debate in the literature [
156,
180,
181,
182,
183,
184,
185,
186,
187,
188,
189,
191,
192,
193,
208,
209,
210,
211,
212]. We invite the reader to consult these references. We have also discussed the conjecture elsewhere [
150,
151] so we will not pursue it here. However, we do wish to make the following important observation. Instead of using the initial probability
, we can use the thermodynamic trajectory probability
or
(see Equation (
307b)) or any arbitrary probability measure
for each trajectory
, and still satisfy
as seen from Equation (
309). Thus,
A thermodynamically consistent result can be obtained for
, which overcomes all the objections raised by Cohen and Mauzerall [
180,
181]. Using the thermodynamic probability
in Equation (
343) for each trajectory instead of
, we obtain a thermodynamically consistent NEQ identity
where
and
both have the same NEQ temperature
, but the temperature
along the rest of
does not have to be equal to
. Here, the missing suffix “in” in
(see Equation (
339)) implies that we are no longer using the initial
, and the additional suffix “e” is because we are using the exchange microwork. The trajectory probabilities contain the correct thermodynamic temperature profile of
through
in Equation (
307b). However, as
is invariant under the change of
, the result does not care if
is reversible or not. Therefore, it provides no information about any irreversibility. The identity in Equation (
340a) is not a thermodynamic identity but does include irreversibility. Unfortunately, it is not clear how to extract this information from it.
17. Brief Discussion and Summary
The present review is motivated by a desire to introduce a recently developed statistical mechanics (
NEQT) as an extension of the EQ statistical mechanics to an NEQ body to a wider audience as the approach has been successfully applied to understand some common problems of interest at the microstate level, so it should useful in other applications. The development of the
NEQT follows two distinct and independent stages. The first stage directly deals with deterministic mechanical evolution of microstates due to the Hamiltonian dynamics, which is then followed in the second stage by its stochastic modification. The division in the two stages is of central importance to the
NEQT and the MNEQT. During the first stage, the second law has no meaning. This allows us to develop the
NEQT by not even imposing the second law; see Remark 1. In the second step, the stochasticity is used to perform various ensemble averages using
to obtain the MNEQT, in which the stability (see Axiom 4) requires thermodynamic force
to vanish in EQ (
76d). We show in
Section 8.4 that the second law is a direct consequence of the stability requirement in the system, which allows us to impose the second law inequalities
, and
in the MNEQT in conformity with the second law.
At the center of the NEQT is the above separation of mechanical and stochastic aspects of a statistical body, and it contains the following four important ingredients:
1. all averages are ensemble averages () as temporal averages are not meaningful;
2. its use of an extended state space in which the NEQ macrostate is uniquely identified so that the NEQT provides not only a straightforward extension of the well-established EQ statistical mechanics, but also of the concept of EQ ergodicity hypothesis;
3. the need to distinguish three different infinitesimals () to describe intrinsic, exchange, and internal (or irreversible) quantities in an NEQ process;
4. its use of fluctuating BI-microquantities that are either mechanical in that they are determined by the Hamiltonian of the body or stochastic in that they are governed by microstate probabilities that add the required statistical nature to the mechanical model of the body. The commutator is at the root of stochasticity, with denoting the various heats. In its absence, the body behaves purely mechanically.
The formulation of the
NEQT is contingent on identifying the extended state space
in terms of a set of internal variables that is dictated by the process under investigation, as discussed in
Section 12. It should be emphasized that internal variables also appear in a purely mechanical body, with its Hamiltonian written as
, as discussed in
Section 4. The latter can be equivalently specified by the set of microstates
and their energies
. As there is no stochasticity associated with
, the temporal behavior of
, if any, must be periodic, as follows from Poincaré’s recurrence theorem [
84,
92,
93]. However, stochasticity changes this behavior dramatically [
221,
222], and endows each of them with a certain relaxation time, whose interplay with the observational time scale
determines if a particular internal variable has equilibrated during
or not. By ordering the internal variables as in Equation (
270a), we determine the window
introduced in Equation (
270b) to eventually identify
in which
is uniquely specified as
. The uniqueness issue is discussed in
Section 12. The situation is not very different from the EQ statistical mechanics, the
EQT. Therefore, it should not come as a surprise that the NEQ macrostate is identified as being in internal equilibrium, a concept that is an extension of the equilibrium. Because of this deep connection between the
NEQT and the
EQT, the basic axioms in the
NEQT include all of the axioms of the
EQT, except for the maximization of the entropy in
that is part of Postulate II [
3]. However, there are also additional axioms of quasi-independence and reduction that play important roles in formulating the
NEQT. The former restricts the sizes of various sub-bodies to be at least as large as their correlation lengths for entropy additivity. The axiom of reduction allows the microquantities associated with any body to be reduced to microquantities associated with another body interacting with the former. However, we only consider reducing microquantities
and q
associated with
and
, respectively, to
and q
for
that is interacting with them.
In
Section 8, we discuss the properties of the unique entropy
for
in
, and discuss its approximate formulation as a flat distribution that is commonly used in EQ statistical mechanics. This distribution neglects any fluctuations in the entropy, which are always present in the body. Despite this, it correctly gives the entropy so it can always be used to determine it as it simplifies the calculation. We show that the entropy additivity requires quasi-independence in
Section 8.1, so the latter should not be confused with the principle of additivity for
.
The goal of the present study is summarized in
Section 1.1 and in Proposition 2. In particular, we have focused on and clarified in this study five important and new but not well-understood concepts of the
NEQT that are also used extensively in the modern approach to fluctuation theorems in the
NEQT [
26,
158,
159]. As many of these concepts are counter-intuitive and not well-understood, we have made the entire study as pedagogical as possible, as noted earlier in
Section 1.3, to reach even an untrained reader by extensively exploiting examples that are taught at an undergraduate level to bring forth these concepts in as simple a way as possible. This has made the presentation lengthy. Some may find the presentation too simple and wordy, while others may need to go back and forth to grasp the concepts as they are inter-related and a challenge to old preconceived ideas. This is a risk we have taken and hope that the reader is going to be patient. Their existence has been well-known in the
but not well-understood. This resulted in their applications at the microstate level generating much confusion in the
NEQT, sometimes because the distinction between concepts remained completely forgotten. This is the situation with the distinction between Fl
and NFl
. The other one is the ubiquitous microforce imbalance (
FI) such as the pressure fluctuation
within the body that is present even in
EQT (see the discussion below Equation (178)), but its relevance becomes apparent when considering its contribution to internal microenergy change
. They remain an integral part of the
NEQT, but are not included in the
NEQT, which only deals with exchange quantities.
We now briefly summarize and discuss some important aspects of the NEQT below.
1.
Second Law and its Violation.An arbitrary stochasticity described by
in the second stage has nothing to do with the second law or the maximum entropy principle [
3]. The latter will emerge only if
is constrained appropriately such as the flat distribution or the most probable distribution. For thermodynamics to be able to satisfy the maximum entropy principle, Callen [
3] adopts it as part of his Postulate II, but it says nothing about the second law as the law of increase in entropy in Proposition 3. For that, we either
postulate the second law as part of the axiomatic formalism or
prove it. The second law in Equation (
213) has not been included in our axiomatic formulation described in
Section 5. We therefore need to prove it, which we do in
Section 8.3 within this formulation by
two independent methods. In a direct proof in
Section 8.3, we count the number
of distinct microstates that the system passes through in time to result in
in
. This number only continues to increase in time, but can never decrease; see Propositions 4 and 5. It is this feature that is responsible for the second law as seen from the Boltzmann principle
; see Equations (
209) and (
206b). This proof of Theorem 8 is for a general macrostate. The method of proof avoids the molecular chaos assumption of Boltzmann because of its several pitfalls, many of which Boltzmann seems to be completely unaware of, that are discussed in
Section 8.3 and summarized in Claim 17. We provide another proof by showing that the second law is a direct consequence of
the stability [
4] (see Axiom 4) of the system in
Section 8.4.
As the second law is not part of the
NEQT, we can use the latter even if the law is violated in the violation thermodynamics
NEQT by properly modifying the averaging in the second stage to obtain the inequalities in Equation (
220). Thus, we are able to investigate
the catastrophic consequences of violating the second law in
Section 9; see Conclusion 7. From this, we conclude that a violation of the second law in the
NEQT can only happen for an unstable system, which is not found in nature. All physical systems form stable systems, even though instabilities arise in approximate calculations such as van der Waals equations or mean field, but they are removed from consideration; see Remark 58. The only credible violation is the
demon paradox of Maxwell [
50] or its various variants, all of which have been shown to be consistent with the second law after careful consideration, as discussed in
Section 8.3. All the so-called violations ([
223], for example) have been observed to occur in stable systems so they must be caused due to incomplete or incorrect analyses, as they contradict Conclusion 7, the demon paradox being one of them. Because of this, we have always assumed that we are dealing with a stable system for which the law is always valid, as noted in
Section 1.
2.
Issue of Uniqueness and. Planck [
224] seems to be the first one to suggest that the concept of entropy must be just as applicable to NEQ macrostates
as to EQ macrostates
. He also advocated the same for the temperature for any
. Landau [
225] seems to be the first one to successfully introduce an NEQ temperature. We have taken the dream of Planck seriously and have attempted to provide a methodology to introduce a unique NEQ entropy. The experimental setup that produces the macrostate
of the body during the process
also dictates how to uniquely describe that macrostate, as discussed in
Section 12, by identifying the particular window
introduced in Equation (
270b). This then identifies the needed state space
in which
becomes
. The setup also determines
and
, so
’s are also uniquely determined in
. Thus, the setup not only uniquely identifies
but also dictates the complete statistical mechanics, the
NEQT. The relaxation times change as the macrostate changes during
so the index
n in
may also change even for a fixed observational time
, probably resulting in different state spaces during
, as discussed earlier. Despite this, as Remark 46 shows, we can continue to use the same state space
over the entire process
by including the hidden entropy generation and irreversible macrowork discussed in
Section 5.9, as need be. In the absence of hidden macroquantities, the thermodynamic entropy of
remains a state function in each of the state spaces along
, and has a unique value that is no different than the statistical entropy. The statistical formulation of entropy in Equation (
116) generalizes Gibbs EQ entropy formulation [
48] to any arbitrary macrostate
by including hidden macroquantities to justify Axiom 3, whose validity for any
requires quasi-independence to make the entropy quasi-additive; see Remark 41.
There have been several attempts since Landau [
225] to introduce NEQ temperature by several authors. It is not possible to list all of them here. So, we have selected a few of these attempts [
13,
18,
23,
226,
227,
228,
229,
230,
231,
232] to show how our approach is different from all of them, without casting any aspersions on those that are omitted. Our thermodynamic definition in Equation (
1) refers to the entire body, so it is not local. The inhomogeneity of the body is captured by the presence of internal variables. Including them allows us to treat the body as a black-box with a unique temperature that obeys Clausius’s
heat theorem that heat flows from hot to cold, as discussed earlier.
The identification of this thermodynamic definition has the following surprising consequence. For any arbitrary macrostate
, the Clausius equality
in Equation (
45) (see Remark 49) and Theorem 4 always hold. These are the two most important aspects of the use of the BI-quantities in the formulation of the MNEQT, to which we now turn.
Before doing that, however, we make the following comment. By replacing
for
by
in Equations (
138a) and (
141), as the case may be, all results for
can be directly taken to be valid for
.
3.
The Importance of BI-quantities. Thermodynamic quantities can be classified into SI- and MI-quantities, which are independent of each other, so that an SI-quantity can be equated only with another SI-quantity; the same is also true of MI-quantities. As emphasized here, the SI-quantities are directly related to the Hamiltonian of the system so they can be generalized to BI-quantities for a body
. Their use proves crucial in identifying the state space
, which then uniquely determines the
NEQT for any
as the corresponding
’s are uniquely determined in
. In particular, they allow us to express the first law in the MNEQT (see Equation (
93a)) in a form in which the generalized heat
, which is proportional to
, and the generalized work
, which is an isentropic change in the energy
E due to work variable
, are BI-quantities (although they are process quantities), as is
. This follows immediately and directly from the form
, which follows from Theorem 10 for any body. As
and
originate from
independent variations of
S and
, respectively, the two cannot be confused; see Conclusion 10. Their independence also simplifies the
NEQT considerably. A consequence of this is the following
simplification: We need not consider any effect of the microheat
while considering the microwork
; see Conclusion 11. This is consistent with treating a microstate as a mechanical system during microwork for which we have the identity
which is independent not only of
along
but also
. In other words,
only depends on the terminal microstates
and
that are the same for all processes between the same macrostates
and
; see Remark 71. It is not a process microquantity. Thus,
is a
microstate function but is Fl. This shows the necessity of distinguishing process and Fl-NFl quantities. For example,
is a NFl-process quantity. We should contrast this with
E being a state function, which is NFl, as it is a macroquantity, but is not a process quantity; see Conclusion 13. We should also recall that
(and
) is a process (macro)quantity. It also follows from the same remark that
varies over
, so it is a process microquantity because of the presence of
in the definition, but is Fl. Its average results in the dissipation
, which is also a process macroquantity.
As
is Fl,
in almost all cases, so it must be so even in
, even though
. It is clear from Proposition 2 that the presence of a
nonzero force imbalance is
necessary (but not sufficient) for dissipation in the system; see also Remark 32 and Conclusion 3. The force imbalance is what gives rise to thermodynamic forces, whose importance does not seem to have been acknowledged to date by scientists who consistently use the
NEQT, a hallmark of which is the conjecture
; see Equation (
7). This amounts to the unintentional consequence that
.
The ubiquitous existence of the
FI
, which immediately follows from Proposition 2, is one of the most surprising results of our approach, which appears almost counter-intuitive and has remained hitherto unrecognized in the field because of it. It is presumably so because it is well-known that
, which follows Equation (
53a). Thus, allowing
to be nonzero seems to contradict
. However, we have shown (see Claim 22) that even if
,
always vanishes and so does
. The root cause of
or
is the ubiquitous nature of the FI
. Thus, these three quantities are interrelated.
From the examples given in the review, there can be no doubt that the ubiquitous existence of
is purely mechanical and does not require any thermodynamic consideration. This has been examined carefully in
Section 6.4. However, its thermodynamic average
, known as the thermodynamic force, may or may not be zero. It may vanish even if
is not identically zero. In this case, we are dealing with a reversible process. The temporal variation in
should be slow compared to
so that the system has enough time to equilibrate during the process. Indeed, is a well-known result from EQ statistical mechanics that the fluctuations in
cannot be identically zero, except at absolute zero. Thus, even in a reversible process,
is not identically zero for
. For an NEQ process during which the temporal variation is not slow compared to
, the system does not have enough time to equilibrate, so
. Therefore, having a nonzero
is necessary but not sufficient for irreversibility. However, its ubiquitous nature must be accounted for, as we do in the
NEQT.
The above discussion was related to the microscopic work–energy relation, but the notion of microheat is just as different between the two microscopic NEQ thermodynamics; see Remark 70. We have mentioned that the microheat in the Langevin evolution proposed by Sekimoto [
140] to obtain the first law for a microstate (a realization of the Langevin process) in the
NEQT is nothing but the irreversible microwork
in the
NEQT cast as the exchange microheat
, which makes Sekimoto’s stochastic energetics very different from that in the
NEQT; see Remark 61. Crooks [
141] also follows the same identification for the exchange heat. The microwork in the
NEQT is isentropic so no heat exchange with the heat bath that Sekimoto includes will change the microenergy
; the heat exchange only affects
. It appears that the two workers are really considering the energy change
and not
(see Equation (
243)), but
is not a genuine microquantity; rather, it is a mixed microquantity, as discussed in Remark 60.
4.
NFl-exchange quantities. Assuming quasi-additivity and quasi-independence, both commonly accepted in the field, we have proved (see Theorem 7) that quantities
for
so that
is NFl, a surprising and novel result despite
being Fl. Its significance has not been appreciated to date by workers in microscopic NEQT. To appreciate this fact, we consider some exchange quantity
, for which we have
see Equation (
193c) over some infinitesimal process
between two neighboring macrostates; see Notation 3. As
and
are independent,
is the same for all
’s between the same two neighboring macrostates, and so is
As a consequence, the exchange quantity
is also the same for all such
’s. It is determined only averaging over all microstates of the medium so it is a genuine MI-macroquantity. Thus, it is easily determined by knowing the properties of the medium that is in EQ. This is a well-known fact of classical thermodynamics, and explains why the
NEQT is so easy to implement. Therefore, it is surprising that the above fact has not been appreciated in the
NEQT including stochastic thermodynamics. Unfortunately, because of Theorem 7, a proper application of the
NEQT cannot capture any statistical fluctuations unless
is improperly treated as a Fl-quantity.
5.
Heat-Work Equivalence. As soon as
has been identified in terms of BI-quantities specified by the nature of the process
, the problem of a unique statistical mechanical description of
is
completely solved in that
are uniquely specified in
; see Equation (
275). This then uniquely specifies
at each instant along
. The identification of
is only possible because of the use of BI-quantities that properly capture fluctuations in a statistical body. Their usage justifies the version of the first law (see Equation (
93a)) in terms of generalized macrowork
and macroheat
that refer to the body; the former is an isentropic quantity, while the latter is an entropic quantity being directly related to entropy change. Therefore, they can be varied independently, which means that there is no constraint on
in general. As a consequence, there cannot be any
equivalence between them. These macroquantities differ from their exchange counterparts
and macroheat
by their irreversible counterparts
see Equation (
95). It is a very important consequence in the MNEQT due to
as a general rule. Thus, there equivalence is a general rule in the MNEQT, and it provides not only a theoretical support for the well-known conclusion by Count Rumford [
165] about the so-called equivalence of the
irreversible macrowork and macroheat (see the discussion just above Equation (
97)) but also generalizes it, so it clarifies its significance due to
. Indeed, Count Rumford had taken precautions to ensure no macroheat exchange with the medium, so his observation was for irreversible macroquantities. In his experiment, the first term on the right side vanishes and we obtain
a well-known result, also known as the Gouy-Stodola theorem, in classical thermodynamics for the dissipated work; see for example [
33,
233,
234]. Comparing with Equation (
356a) derived in the MNEQT, it becomes clear that the above theorem is valid only when the system and the medium have the same temperature to ensure no macroheat exchange, similar to the conditions imposed by Count Rumford. But his observations leave out the situation of a possible heat exchange, so it is not clear what is meant by macroheat converting into macrowork in his statement. Thus, Equation (
356a) extends the theorem to a more general situation, where the meanings of
and
are clear in the MNEQT.
Moreover, the above equivalence is also extended in the
NEQT between internal microwork
and microheat
, which has not been hitherto recognized. What is remarkable about the equality is that it relates a purely mechanical quantity
with a purely stochastic quantity
which is easily derivable from Equation (
256b). This is what makes the
NEQT so useful, and a promising alternative to widely used current approaches [
10,
12,
13,
17,
18,
19,
20,
21,
24,
25,
26,
27,
28,
99,
135,
136,
137,
138,
139,
140,
141,
142,
143,
144,
145,
146,
147] that are primarily based on the
nonfluctuating exchange quantities as remarked above.
6.
Work–Energy Theorem.Microwork
in the
NEQT is purely mechanical in that it is not influenced by
, while microheat
is stochastic in that it is determined by
. Thus,
and
originate from different sources. From the Work–Energy Theorem 6, we have
. As
for any body is a function of
only, there is no
in
. A comparison with the first law
, Equation (
91) in Remark 30, clearly shows that there is no analog of this law for a microstate in the
NEQT. This fact should not be confused with Equation (
243), which deals with
and not with
or with Equation (
281); the latter refers to the microstate energy fluctuation within the body
over its microstates. The physical implication of this first-law-looking Equation (
281) has been discussed in
Section 12.2, and merely reflects the fact that the BI-combination
in Equation (
277) is NFl over
, but that there are no exchange analogs of the two terms on the right side of Equation (
281), and has nothing to do with any first law for
as summarized in Conclusion 61. In contrast, there is an analog of the microscopic first law in the
NEQT; see Remark 70.
Before we end the review, we wish to briefly point out some of the major differences between the
NEQT based on the SI-quantities and other current theories that are formulated in terms of the MI-quantities representing exchanges with the medium [
99,
135,
136,
137,
138,
139,
140,
141,
142,
143,
144,
145,
146,
147]; see also
Section 1.2. Because of the use of exchange quantities, they all belong to the
NEQT.
The use of the SI-quantities in the
NEQT allows us to uniquely identify all SI-macrofields such as the unique NEQ SI-temperature
T of a body; see Equation (
129). But this is not possible in the
NEQT, where it has been defined in several ways, not all different for any
. This issue has been discussed elsewhere [
76,
77].
The use of SI-quantities in the NEQT has the following important consequence. It can be directly applied to an isolated system for which so that captures the contributions from all internal processes unambiguously. But is not even defined in the NEQT, except for a state variable q, so knowing does not allow for determining directly and unambiguously. They are determined indirectly. As an example, the lost macrowork due to irreversibility in classical thermodynamics (also belonging to the NEQT) is defined as , where various and refer to the exchange macroworks along two distinct processes: a reversible and an irreversible. It is easy to see that is precisely the irreversible macrowork , which is determined by the actual process. While is defined in the NEQT, is never defined in the NEQT.
In the
NEQT, the exchange microwork
is NFl as
. In contrast,
in accordance with the conjecture in Equation (
7) is Fl in the
NEQT.
In the
NEQT, due to the use of SI-microquantities
that are by nature Fl, the fluctuations are incorporated in this statistical mechanics. In contrast,
are NFL, some of which, such as
and
, are also used in the
NEQT. Therefore, additional justification is required to capture fluctuations in the
NEQT. The most common justification is to use the conjecture in Equation (
7) that equates
with (
) to make it Fl; see the discussion of Equation (
345). The conjecture seems to have a wider usage including stochastic and quantum thermodynamics [
99,
135,
136,
137,
138,
139,
140,
141,
142,
143,
144,
145,
146,
147], which all use the
NEQT; see Remarks 61 and 70.
Microstate probabilities
are uniquely determined in the
NEQT because of the use of SI-microquantities. For example, the macroheats in the
NEQT are ensemble averages over microstates with
as in Equations (
236) and (
239). We do not need to invoke any master equation or the Fokker–Planck equation to determine them. As
cannot be uniquely determined in the
NEQT, a master equation or a Fokker–Planck equation is required to determine them. For example, the use of a master equation allows the identification of exchange macroheat in terms of transitions between microstates [
235].
The use of SI-quantities allows for the introduction of partition functions in the NEQT but cannot be defined in the NEQT.
There is no analog of the first law for a microstate in the
NEQT. However, there is such an analog in the
NEQT proposed by Sekimoto [
146].
A major open problem in the
NEQT is to provide a strong justification for Proposition 1 to ensure that the
NEQT is applicable to any arbitrary macrostate
. At present, it is merely a proposition, although a very convincing one. According to this proposition, any arbitrary macrostate
can be always identified as
with no explicit time dependence in an appropriate state space
. In a smaller state space
,
will have hidden entropy generation
(see Equation (
139a)) due to this explicit time dependence, which puts a very strong limitation on the possible explicit time dependence that it must give rise to
, as discussed in
Section 5.9. It is only this restricted form of explicit time dependence in
or
in the
NEQT that remains consistent with the second law. Therefore, it will be interesting to investigate if any arbitrary form of explicit time dependence in
or
can be shown to satisfy the second law.



{kind=link}
{kind=link}
{kind=link}
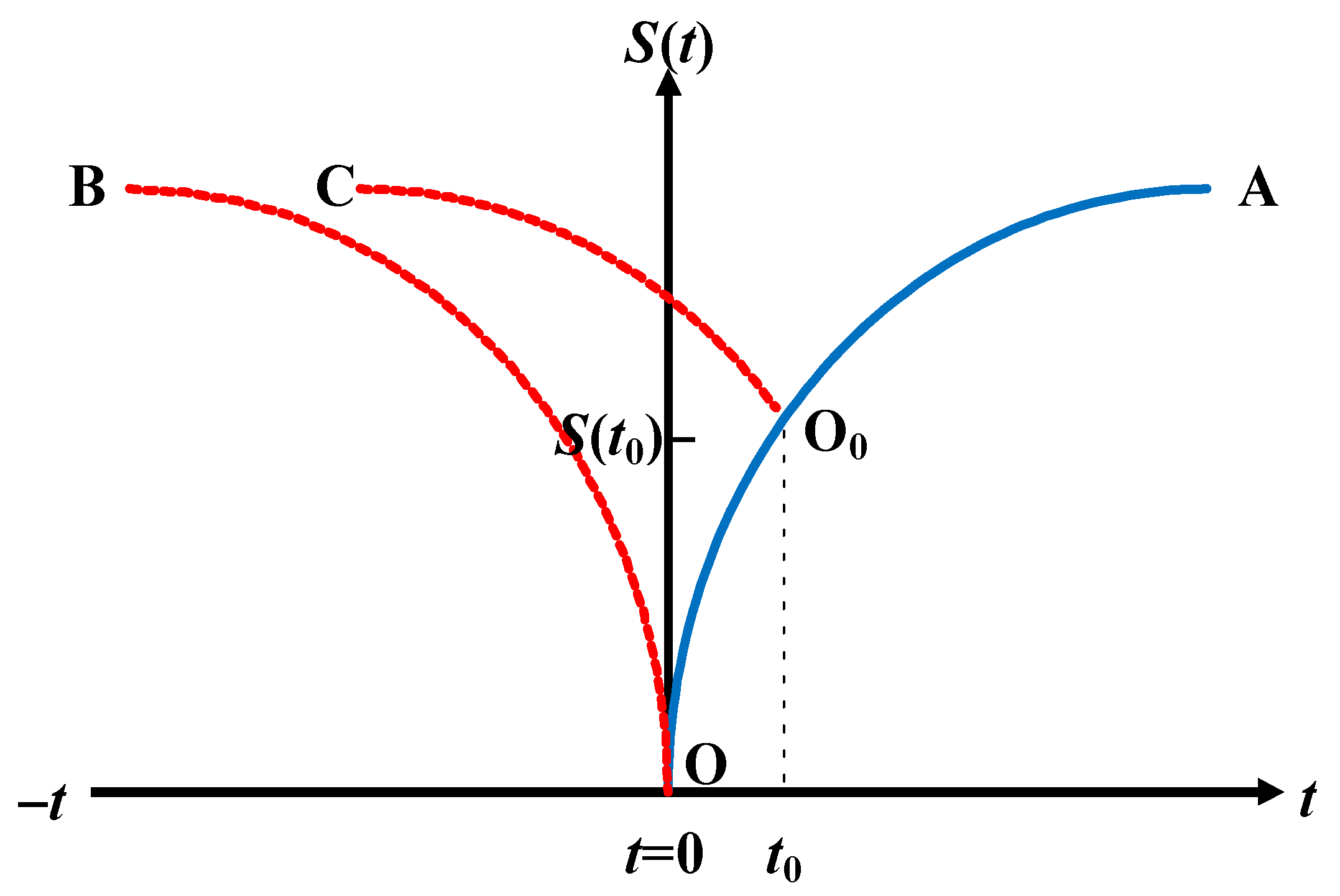{kind=link}
{kind=link}
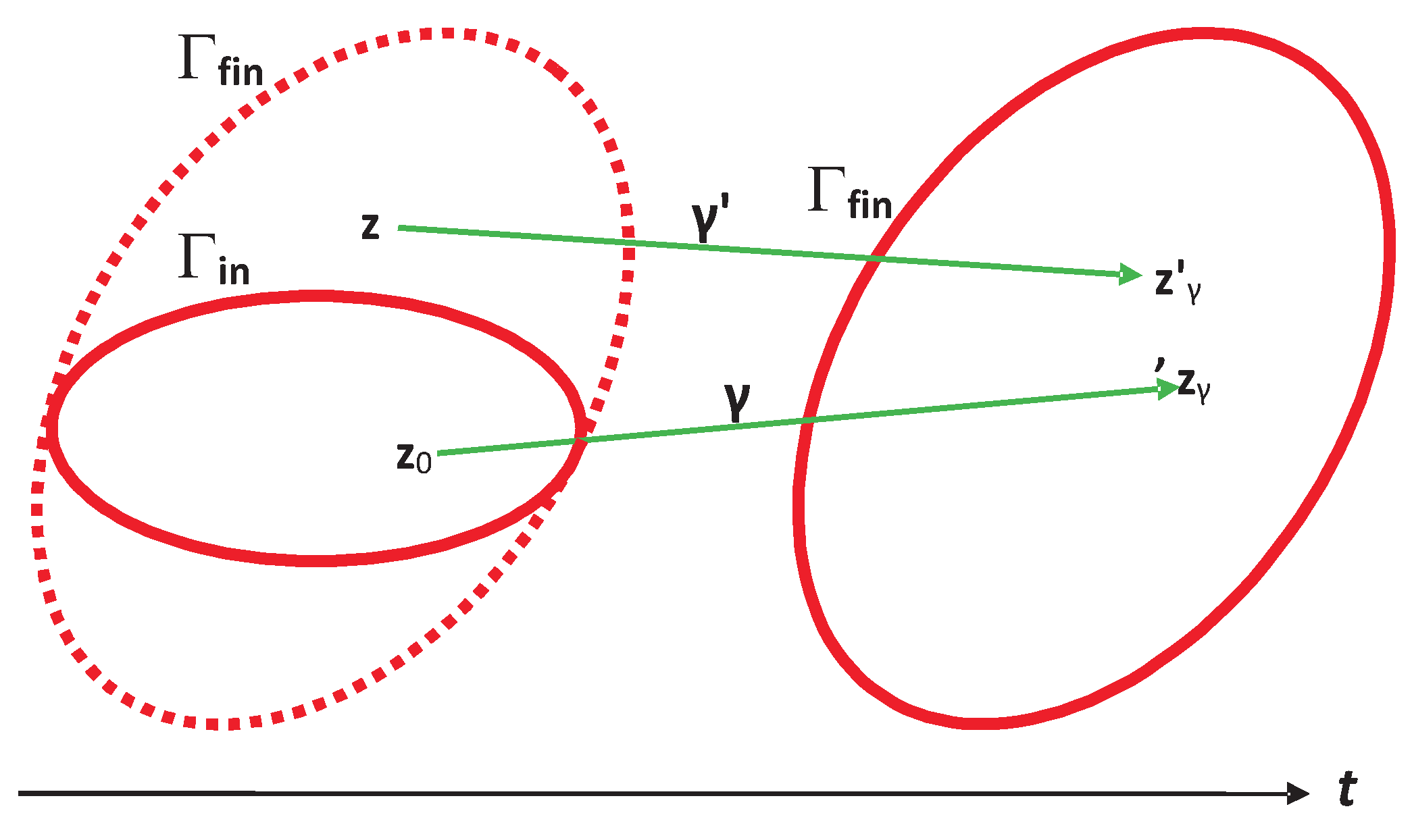{kind=link}





