
Experimental Studies on Low-Latency RIS Beam Tracking: Edge-Integrated and Visually Steered

Abstract
1. Introduction
- 1.
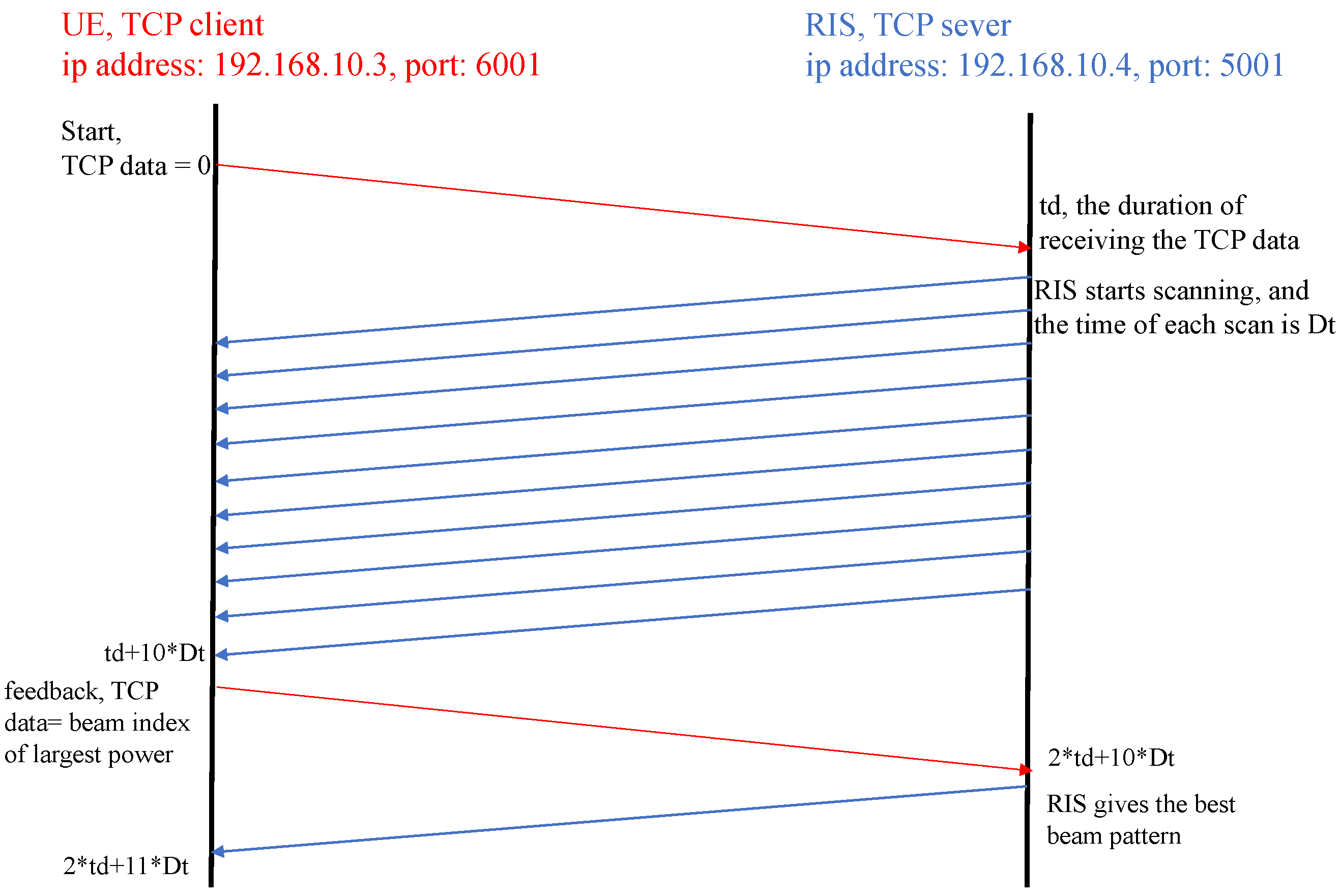
- The Edge-Integrated RIS Control Mechanism (EIR-CM). This approach integrates the UE baseband signal processing and the RIS control system into the same edge server. It migrates the RIS feedback computation logic to a local computing unit, eliminating dependence on remote servers for codebook management. Within the Local Area Network (LAN), the UE directly controls the RIS reflection mode via TCP, bypassing remote server interactions. By adopting an integrated RIS control architecture, real-time CSI computation and RIS feedback optimization are performed on the local host, reducing beam adjustment latency by over 50% compared to traditional remote interaction schemes. This approach is suitable for low-latency, high-speed dynamic RIS tracking scenarios, particularly in applications such as smart buildings, industrial automation, and intelligent transportation, serving as a low-latency RIS control solution for 6G networks.
- 2.
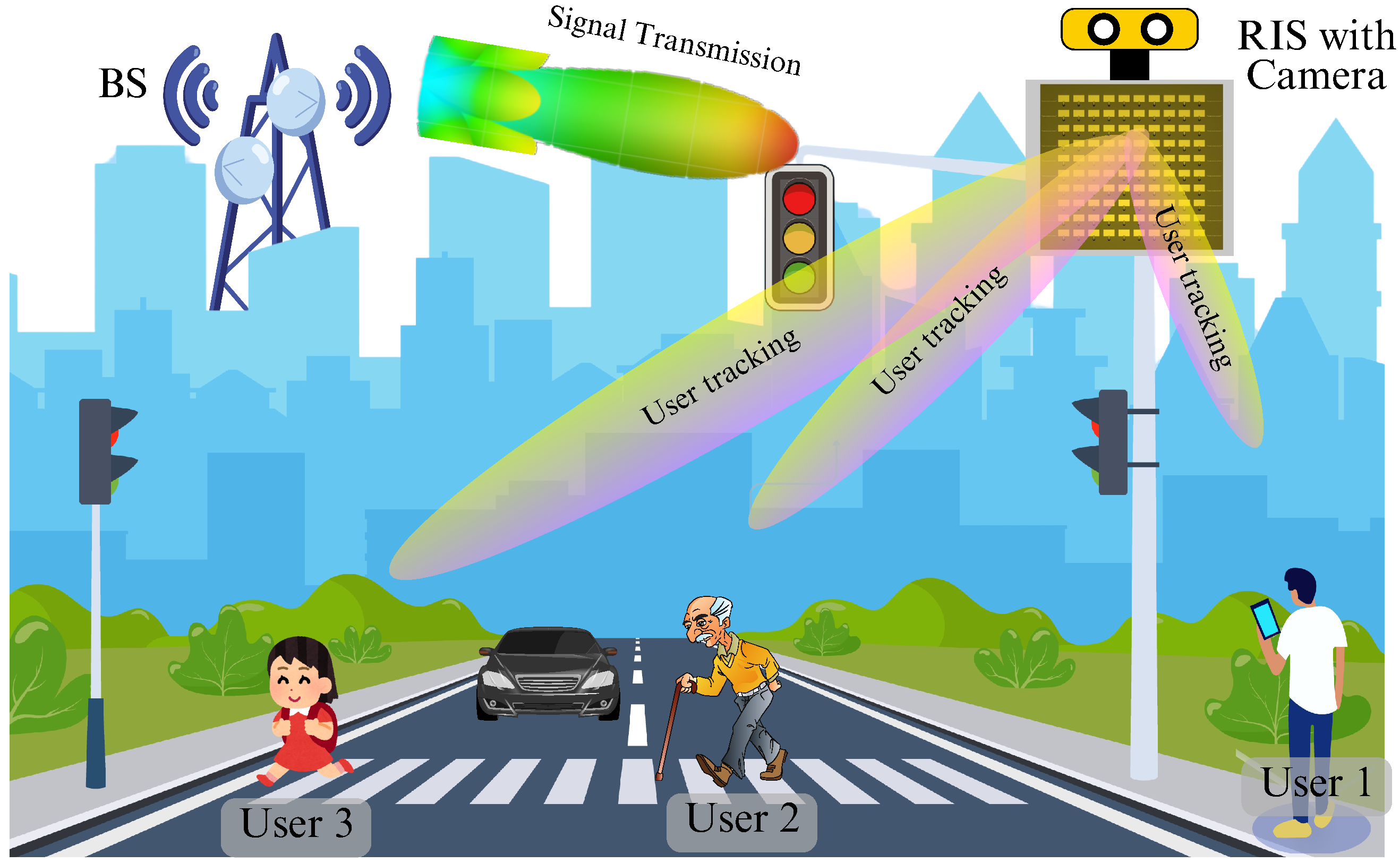
- The Visually Steered RIS Control Mechanism (VSR-CM). This approach employs the YOLOv7 object detection algorithm [31] + depth camera (Intel RealSense D435i) for user detection, enabling real-time UE position recognition. Unlike traditional methods that traverse the entire codebook, this scheme directly maps the detected user position to the optimal RIS codebook via object detection, significantly accelerating beam adjustment. As a result, no feedback from the UE to the RIS control system is required, and RIS control is performed purely based on vision perception, reducing feedback communication overhead. This approach is particularly suitable for high-speed mobile users (such as drones, autonomous driving, and V2X vehicular networks) and enables millisecond-level dynamic RIS beam adjustments, improving tracking stability.
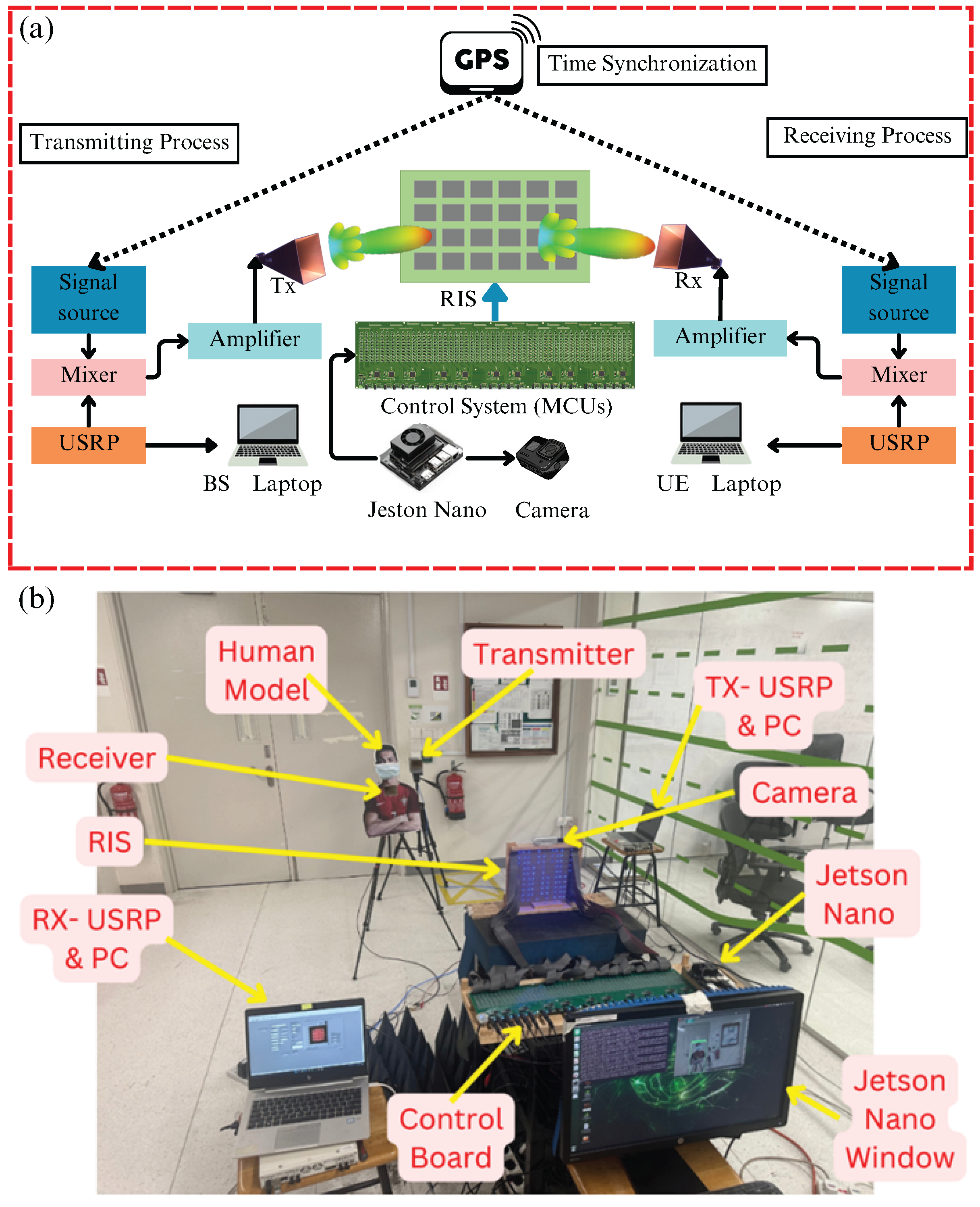
2. System Architecture
2.1. The Edge-Integrated RIS Control Mechanism
| Algorithm 1 The EIR-CM mode tracking algorithm |
|
2.2. Visually Steered RIS Control Mechanism
| Algorithm 2 The VSR-CM mode tracking algorithm |
|
- 1.
- Pre-processing stage: First, the system initializes the YOLOv7 target detection model, loads the pre-trained YOLOv7 model, and starts the RGB and depth data streams from the Intel RealSense D435i camera; the RGB images are used for target detection, while the depth information is used for the subsequent spatial coordinate calculation. In addition, the system initializes UART communication to establish a serial connection between the RIS control system and the FPGA control board for transmitting beam control commands. Finally, the system loads the RIS reflection codebook (Patterns.txt), which stores the RIS reflection patterns in different directions. The system will select the appropriate beam direction according to the detected user position.
- 2.
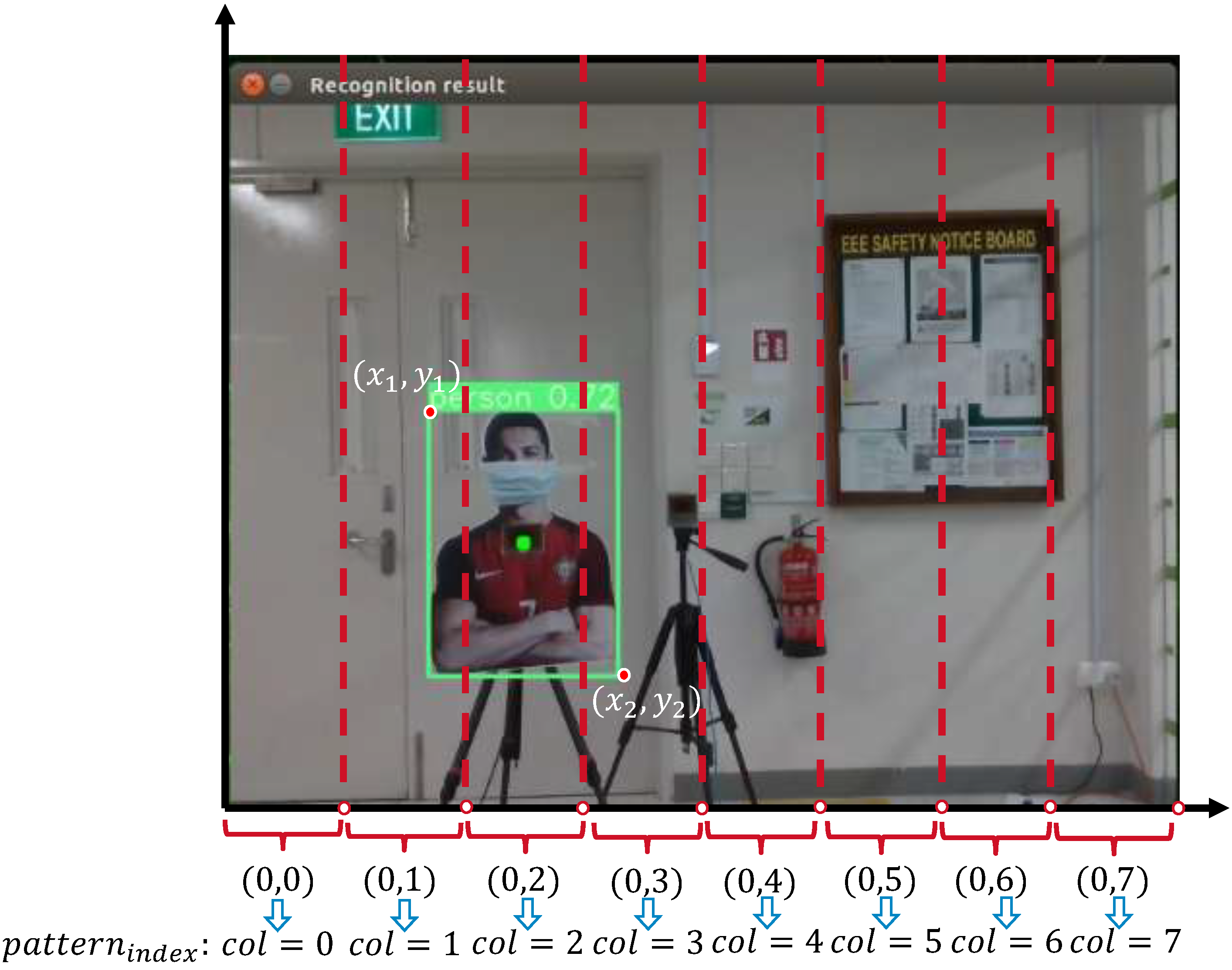
- Object Detection and User Localization: The camera starts capturing environmental images, and the YOLOv7 model processes the input RGB image to output object detection results, including bounding box coordinates , where represents the top-left corner of the detected object, and represents the bottom-right corner (as shown in Figure 4). YOLOv7 also classifies detected targets and provides a confidence score to ensure detection reliability. For RIS beam control, the system divides the image level into 8 grid cells (cells) and calculates the cell width:cell_width = frame_width/8.
3. Results
3.1. Demonstration of the Edge-Integrated RIS Control Mechanism
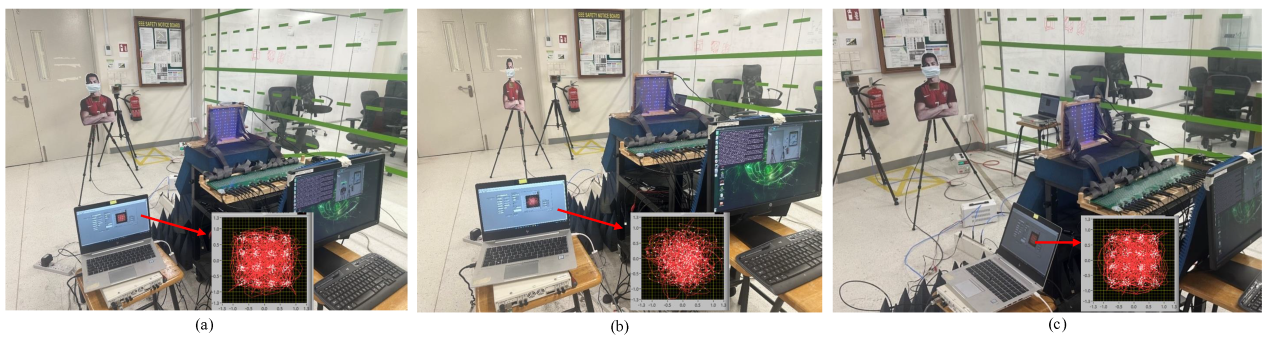
3.2. Demonstration of the Visually Steered RIS Control Mechanism
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Acronyms
| Acronym | Definition |
| RIS | Reconfigurable Intelligent Surface |
| UE | User Equipment |
| EIR-CM | Edge-Integrated RIS Control Mechanism |
| VSR-CM | Visually Steered RIS Control Mechanism |
| mmWave | Millimeter–Wave |
| LoS/NLoS | Line-of-Sight/Non-Line-of-Sight |
| LAN | Local Area Network |
| V2X | Vehicle-to-Everything |
| UAV | Unmanned Aerial Vehicle |
| TCP/IP | Transmission Control Protocol/Internet Protocol |
| FPGA | Field-Programmable Gate Array |
| CSI | Channel State Information |
| YOLOv7 | You Only Look Once version 7 (real-time object detector) |
| UART | Universal Asynchronous Receiver/Transmitter |
References
- Zhao, Y.; Guan, Y.L.; Ismail, A.M.; Ju, G.; Lin, D.; Lu, Y.; Yuen, C. Holographic-inspired meta-surfaces exploiting vortex beams for low-interference multipair IoT communications: From theory to prototype. IEEE Internet Things J. 2024, 11, 12660–12675. [Google Scholar] [CrossRef]
- Xu, J.; Xu, W.; Yuen, C. On performance of distributed RIS-aided communication in random networks. IEEE Trans. Wirel. Commun. 2024, 23, 18254–18270. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, Z.; Lu, Y.; Guan, Y.L. Multimode OAM convergent transmission with co-divergent angle tailored by airy wavefront. IEEE Trans. Antennas Propag. 2023, 71, 5256–5265. [Google Scholar] [CrossRef]
- Chen, M.; Chen, R.; Zhao, Y.; Yang, Z.; Guan, Y.L. Index-modulation OAM detectors resistant to beam misalignment. IEEE Trans. Veh. Technol. 2023, 73, 2836–2841. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, C. Compound angular lens for radio orbital angular momentum coaxial separation and convergence. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 2160–2164. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, C. Distributed antennas scheme for orbital angular momentum long-distance transmission. IEEE Antennas Wirel. Propag. Lett. 2019, 19, 332–336. [Google Scholar] [CrossRef]
- Yang, Z.; Ge, Y.; Zhao, Y.; Fang, Y.; Guan, Y.L. Protograph LDPC code and shaped index modulation design for multi-mode OAM systems. IEEE Trans. Commun. 2024, 72, 5162–5178. [Google Scholar] [CrossRef]
- Zhao, Y.; Ma, X.; Guan, Y.L.; Liu, Y.; Ismail, A.M.; Liu, X.; Yeo, S.Y.; Yuen, C. Near-orthogonal overlay communications in LoS channel enabled by novel OAM beams without central energy voids: An experimental study. IEEE Internet Things J. 2024, 11, 39697–39708. [Google Scholar] [CrossRef]
- Zhao, Y.; Guan, Y.L.; Chen, D.; Ismail, A.M.; Ma, X.; Liu, X. Exploring RCS diversity with novel OAM beams without energy void: An experimental study. IEEE Trans. Veh. Technol. 2024, 74, 8321–8326. [Google Scholar] [CrossRef]
- Wang, J.; Tang, W.; Jin, S.; Wen, C.-K.; Li, X.; Hou, X. Hierarchical codebook-based beam training for RIS-assisted mmWave communication systems. IEEE Trans. Commun. 2024, 71, 3650–3662. [Google Scholar] [CrossRef]
- Xu, Y.; Huang, C.; Wei, L.; Yang, Z.; Hammadi, A.A.; Yang, J.; Zhang, Z.; Yuen, C.; Debbah, M. Hashing beam training for integrated ground-air-space wireless networks. IEEE J. Sel. Areas Commun. 2024, 42, 3477–3489. [Google Scholar] [CrossRef]
- Li, M.; Zhang, S.; Ge, Y.; Yuen, C. STAR-RIS aided dynamic scatterers tracking for integrated sensing and communications. IEEE Trans. Veh. Technol. 2025, 74, 7760–7773. [Google Scholar] [CrossRef]
- Sun, G.; Yan, W.; Hao, W.; Huang, C.; Yuen, C. Beamforming design for the distributed RISs-aided THz communications with double-layer true time delays. IEEE Trans. Veh. Technol. 2025, 73, 3886–3900. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, C.; Huang, C.; Ge, J.; Niyato, D.; Yuen, C. RIS-assisted ISAC systems for robust secure transmission with imperfect sense estimation. IEEE Trans. Wirel. Commun. 2025, 24, 3979–3992. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, C.; Huang, C.; Ge, J.; Debbah, M.; Yuen, C. Exploiting RIS in secure beamforming design for NOMA-assisted integrated sensing and communication. IEEE Internet Things J. 2024, 11, 28123–28136. [Google Scholar] [CrossRef]
- Zhu, Z.; Li, Z.; Chu, Z.; Guan, Y.; Wu, Q.; Xiao, P.; Renzo, M.D.; Lee, I. Intelligent Reflecting Surface Assisted mmWave Integrated Sensing and Communication Systems. IEEE Internet Things J. 2024, 11, 29427–29437. [Google Scholar] [CrossRef]
- Han, H.; Jiang, T.; Yu, W. Active Sensing for Multiuser Beam Tracking With Reconfigurable Intelligent Surface. IEEE Trans. Wirel. Commun. 2025, 24, 540–554. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, Y. High precision deep sea geomagnetic data sampling and recovery with three-dimensional compressive sensing. IEICE Trans. Fundam. 2017, E100-A, 13172–13188. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, Y.; Zhang, Y.; Li, F.; Jiang, S. Position aided open-loop passive magnetic MIMO transmission. IET Commun. 2017, 11, 13172–13188. [Google Scholar] [CrossRef]
- Lin, D.; Wan, J.; Wang, J.; Kong, L.; Zhao, Y.; Guan, Y.L. A novel topology-scale-adaptive and energy-efficient clustering scheme for energy sustainable large-scale SWIPT-enabled WSNs. IEEE Trans. Mob. Comput. 2024, 23, 13172–13188. [Google Scholar] [CrossRef]
- Lin, D.; Zhao, J.; Yu, F.; Min, W.; Zhao, Y.; Guan, Y.L. A novel high-precision and low-latency abandoned object detection method under the hybrid cloud-fog computing architecture. IEEE Internet Things J. 2024, 11, 40448–40463. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, Y.; Yuen, C.; Guan, Y.L.; Shen, Z. Enhanced bandwidth and continuous phase modulation in a novel varactor-based RIS design. In Proceedings of the 2024 IEEE International Symposium on Antennas and Propagation and INC/USNC-URSI Radio Science Meeting (AP-S/INC-USNC-URSI), Firenze, Italy, 14–19 July 2024. [Google Scholar]
- Feng, X.; Zhao, Z.; Zhao, Y.; Zhao, Z.; Meng, L.; Guan, Y.L. OFDM-based waveform design for MIMO DFRC systems with reduced range sidelobes: A majorization-minimization approach. IEEE Trans. Veh. Technol. 2024, 74, 4582–4595. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, C. Orbital angular momentum beamforming for index modulation with partial arc reception. Electron. Lett. 2019, 55, 1271–1273. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, Y. Orbital angular momentum nondegenerate index mapping for long distance transmission. IEEE Trans. Wirel. Commun. 2019, 18, 1271–1273. [Google Scholar] [CrossRef]
- Hong, Y.; Zhao, Y.; Yuen, C.; Qing, X. A STAR-RIS with independent 1-bit wave control. In Proceedings of the 2024 IEEE International Symposium on Antennas and Propagation and INC/USNC-URSI Radio Science Meeting (AP-S/INC-USNC-URSI), Firenze, Italy, 14–19 July 2024. [Google Scholar]
- Zhao, Y.; Guan, Y.L.; Yuen, C.; Liu, X.; Ismail, A.M.; Ge, Y. Advanced artificial Doppler shift manipulation with rotational vortex beams in space-time digital-coding RIS system: A practical approach. In Proceedings of the 2024 IEEE VTS Asia Pacific Wireless Communications Symposium (APWCS), Singapore, 21–23 August 2024. [Google Scholar]
- Zhao, Y.; Feng, Y.; Ismail, A.M.; Wang, Z.; Guan, Y.L.; Guo, Y.; Yuen, C. 2-bit RIS prototyping enhancing rapid-response space-time wavefront manipulation for wireless communication: Experimental studies. IEEE Open J. Commun. Soc. 2024, 5, 4885–4901. [Google Scholar] [CrossRef]
- Zhao, Y.; Ismail, A.M.; Ju, G.; Wang, Z.; Liu, Y.; Guan, Y.L. 2-bit Intelligent Reflection Surface Enhances Urban Wireless Communications: An Experimental Study. In Proceedings of the 2024 IEEE International Workshop on Antenna Technology (iWAT), Sendai, Japan, 15–18 April 2024. [Google Scholar]
- Zhao, Y.; Ma, X.; Wang, Z.; Liu, Y.; Yuen, C.; Guan, Y.L. Enhancing Urban Mobile Communications with Dynamic 3D Beam Tracking: A 2-Bit Phase-Quantized Adaptive RIS Approach. In Proceedings of the 2024 IEEE 35th International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Valencia, Spain, 2–5 September 2024. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2024, arXiv:2207.02696. [Google Scholar]
- Zhang, C.; Jiang, X.; Zhao, Y. Efficient instantaneous channel propagation modeling for aeronautical communications systems with compressed sensing. IEEE Trans. Antennas Propag. 2021, 70, 1211–1220. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tracking Scheme | Traditional Multi-Host Scheme [28] | Edge-Integrated RIS Control Mechanism | Visually Steered RIS Control Mechanism |
|---|---|---|---|
| Tracking Latency | 3–4 s | 1–2 s | <0.5 s |
| Synchronization | Required | No Required | No Required |
| Feedback | Required | Required | No Required |
| Codebook Traversal | Traverse All | Traverse All | Directly Select Target Codebook |
| System Complexity | Multi-Host | Integrated Host | Single Host + Depth Camera |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Nie, Y. Experimental Studies on Low-Latency RIS Beam Tracking: Edge-Integrated and Visually Steered. Network 2025, 5, 22. https://doi.org/10.3390/network5030022
Wang Z, Nie Y. Experimental Studies on Low-Latency RIS Beam Tracking: Edge-Integrated and Visually Steered. Network. 2025; 5(3):22. https://doi.org/10.3390/network5030022
Chicago/Turabian StyleWang, Zekai, and Yuming Nie. 2025. "Experimental Studies on Low-Latency RIS Beam Tracking: Edge-Integrated and Visually Steered" Network 5, no. 3: 22. https://doi.org/10.3390/network5030022
APA StyleWang, Z., & Nie, Y. (2025). Experimental Studies on Low-Latency RIS Beam Tracking: Edge-Integrated and Visually Steered. Network, 5(3), 22. https://doi.org/10.3390/network5030022