1. Introduction
By offering guaranteed access to the resources of a network consisting of Ethernet bridges, Time-Sensitive Networking (TSN) plays an important role in many applications that demand reliable data links, especially in the field of industrial communication [
1]. As the new 3GPP standard for mobile communications, 5G is emerging in this application field, described by the 5G application profile ultra Reliable Low Latency Communications (uRLLC). As a highly configurable solution for wireless communication in both small and large areas, 5G has the potential to meet the tasks of many current and future commercial application areas, such as industrial automation and Vehicle to Everything (V2X) [
2]. By entering this new application field, 5G comes into contact with technologies of wired industrial communication, such as TSN; a lack of compatibility between these technologies, however, limits exploitation of the full potential of both.
By reaching an appropriate degree of compatibility, 5G could expand the range of use of TSN to the wireless area, opening up the application field of deterministic wireless communications. As 5G takes part in an ongoing standardization process, possible amendments can be further investigated to support the convergence of 5G and TSN. In this work, an analysis of the understanding of packet priorities regarding channel access in the respective technologies is carried out. On the basis of the identification of incompatible architectural conditions, a novel approach to allocating the resources of the 5G radio channel is derived.
2. Motivation
Time-critical and reliable communication is a great issue in many application scenarios, both in principle, and in terms of scalable solutions that work with an increasing number of use cases running in parallel on the same infrastructure. This is especially true where a collective of machines act in a closed control loop without humans, which is very much the case in industrial and upcoming novel applications. Much ongoing research in the field of 5G, 6G, and future industries has been motivated by the possibilities made available by autonomous robots of various kinds.
A factory in a future scenario with Automated Guided Vehicles (AGVs), such as with drones or driving robots, was established in [
3]. The manuscript focused on proposing a mechanism to increase the flexibility of the scenario. Part of the necessity for this redeployment mechanism is the need for low communication delays and low jitter. In [
4], a time-variant setup in agriculture was demonstrated by picturing the possibility of having many tasks in food cultivation being taken over by autonomous vehicles such as tractors. In the field, drones can provide monitoring, measurements, or even radio coverage, while sowing and harvesting equipment autonomously drives to and from the field and performs the operations there. Many devices have operations that are dependent on the activities of others.
Unmanned Aerial Vehicles (UAVs) can be considered to be moving robots with extended range, mobility, flexibility, and dimensional freedom. Hence, most demands derived from any robotic control apply to drones as well, though in differing numbers, depending on the concrete usage. Due to their increased degree of freedom, UAVs can be utilized to realize unique applications. For example, as outlined in [
5], they can be used as aerial base stations to complement existing cellular systems or to set up full infrastructures. This can be used, e.g., in emergency and public safety situations. On the other hand, connecting UAVs as mobile terminals into a network renders applications such as video surveillance or item delivery possible. For realization, numerous technical challenges arise; for instance, radio signal air coverage, channel modeling, and safety concerns. Again, the quality and reliability of communication links are directly correlated with the possible performance and increased relevance of the hazard assessment of flying robots.
A very AGV-heavy application was introduced in [
6]. A swarm of robots collaboratively located a signal source via an emergent intelligence (EI) algorithm, which is fully distributed, whereas the robots acted independently apart from communicating to send status updates. The background of that work was to find new measures to reduce extensive communication costs. The authors demonstrated that insufficient QoS harms the algorithm’s behavior.
Automated intralogistic systems have been on the rise for years, and are indispensable for any kind of efficient handling of large quantities of goods. Automated systems have high demands on QoS for a communication system. They have to combine dynamically incoming tasks, changing transportation routes, and the AGVs that execute the transportation. The authors in [
7] proposed a mission control tool for automated task management, resource allocation, and fleet navigation. They carried out an evaluation using a scalable Key Performance Indicator (KPI) function, suggesting that the overall system performance becomes capped if no QoS assurance measurements are taken to ensure message exchange between the system elements. Increasingly complex systems are constantly being developed and improved, such as in [
8,
9]. Transportation task scheduling to generate a deterministic outcome and robotic fleet coordination can both intensively benefit from integration with TSN alongside wireless communication. Coordination operates more smoothly with reliable data input, and machine-controlled robots can operate with much higher velocity, density, and precision, as these parameters are directly correlated with the update rates of commands and feedback, and by extension, with the communication system’s QoS. In [
10], the authors demonstrated how such systems could be made functionally richer. The data synthesis they proposed as part of a data aggregation suite requires a certain timeliness of data when subject to computation leading to a joint result.
All these robotic use cases require deterministic, predictable, and highly reliable communication for proper operation, and those features are intended to be supplied by TSN. At the same time, parts of the participating devices freely move around, in many cases over wide areas, which calls for wireless connection that is specifically provided by mobile communications. Seamless integration between factory-level TSN networks and mobile communication radio infrastructures is key for enabling many envisioned scenarios.
Comparably novel concepts must have dynamic infrastructures. More precisely, not only should applications that utilize an interconnection operate dynamically, the underlying infrastructure should be able to reshape itself [
11,
12,
13]. Such operations must certainly not interfere with the performance of the provided connection, which is why they can be very time-critical. This again includes the depicted agricultural use case [
4], especially the feature that a communication infrastructure on a crop field does not have to be provided entirely throughout the year, only during specific periods. Utilizing drone networks with mobile communications can be a solution that requires extension through TSN features.
Digital Twins (DTs) can have many different purposes, and thus different implementation and execution paradigms, which in turn influences demands depending on the use scenario. A DT can be used as a detached parallel world, for example, to simulate a system’s behavior in advance, which is of lesser relevance for the work at hand. In addition, it can serve as a live image, which is a popular application in many production scenarios [
14]. In addition to the technical implications, which are as mentioned for all controlling use cases, the timeliness of data and the reliability of communications can directly influence production lines and product quality, and by extension, business competition and monetization.
3. Related Works
As the use of mobile networks, especially in the form of Non-public Networks (NPNs) for Industry 4.0, is gaining high interest, the convergence of 5G and TSN is being heavily researched at this time.
David Ginthör et al. classified the types of delay in a 5G System (5GS) in [
15], considering mini-slot scheduling and simulating different Semi-persistent Scheduling (SPS) strategies for multi-user TSN over 5G. They concluded that the current mechanisms of 5G for supporting uRLLC traffic do not satisfy the requirements of TSN streams, and end-to-end scheduling including both systems is needed.
In [
16], Tobias Striffler et al. summarized the current state of 3GPP standardization regarding the compatibility with TSN. They described different architecture models for 5G TSN integration and approaches to time synchronization between 5G and TSN. Based on an analysis of the 5G Quality of Service (QoS) framework, they concluded that further extension is needed to support TSN traffic over 5G.
Ana Larrañaga et al. described in [
17] how the bridge parameters provided by 5GS to the TSN control plane can be derived, and how the TSN requirements can be mapped to QoS parameters in 5G. The authors state that determination of the 5GS delay parameters is a difficult task, and one that could be further investigated to increase the degree of compatibility between TSN and 5G.
Renato Abreu et al. in [
18] presented a novel scheduling approach for 5G taking into account multi-user scenarios, inter-cell interference, control channel overhead, and varying channel conditions. They compared Dynamic Packet Scheduling (DPS) and SPS, and investigated the appropriate interval for updating the Modulation and Coding Scheme (MCS) for the case of SPS.
In [
19], a heterogeneous network architecture connecting 5G and TSN in an industrial sensor and controller environment was proposed, leveraging a combination of adaptive semi-persistent scheduling in 5G and per-stream filtering and policing for data injection from the uplink into TSN. The proposed architecture achieves low and deterministic delay for multi-user uplink traffic of different priorities.
In summary, former research has staked out the discrepancies between the 5G QoS framework and TSN requirements, investigated the suitability of different scheduling mechanisms, and evaluated architecture models for the integration of 5G and TSN. This research has contributed to the ongoing standardization of 5G. However, to the best of our knowledge, the problem of scheduling multiple TSN streams per User Equipment (UE) in accordance with the requirements of the TSN control plane expressed in Gate Control Lists (GCLs) needs to be addressed in the context of mapping 5G native scheduling mechanisms to TSN traffic shaping.
The present work aims to fill this gap by investigating the prioritization mechanisms for logical channels in the 5G RAN and comparing them to the requirements of TSN streams. A scheduling scheme is derived which can be configured on the basis of QoS flows to meet the timing requirements of deterministic TSN traffic. In contrast with the current standard, the traffic shaping rules demanded by the TSN control plane are enforced directly by the 5G Radio Access Network (RAN) via the allocation of physical radio resources, instead of by additional translator functions located at the edge of the 5G User Plane.
4. Architecture
Section 4 describes the basic functionalities and architectural components of TSN and 5G, as well as the integration architecture for the convergence of both networks considered in this work.
4.1. TSN
Time-Sensitive Networking describes a collection of IEEE standards that aim to realize deterministic communication links based on Ethernet. The functionality of TSN is based on a configuration scheme applied by all participating bridges. Therefore, the synthesis of a traffic forwarding strategy that meets all application requirements and the exchange of control plane messages distributing the outcome thereof is necessary. The task sharing of this process can be realized by three different types of architectures, several of which can be combined [
20]:
Centralized: All communication partners (Talkers and Listeners) are connected to a Central User Configuration (CUC), which forwards their requirements to a Central Network Configuration (CNC). The CNC has information about the network topology and the bridge capabilities. On this basis, the CNC computes a configuration scheme for the ports of every bridge in the network and distributes it.
Decentralized: No central configuration nodes are deployed. Instead, all TSN bridges distribute the TSN stream requirements under each other and determine a traffic forwarding scheme based on predefined protocols and algorithms.
Hybrid: A hybrid TSN architecture deploys a CNC, omitting the use of a CUC. Talkers and Listeners only communicate with the next node of the TSN bridge network, which forwards the stream requirements to the CNC.
Current TSN standards depict several technologies to support a common traffic forwarding configuration in all bridges of an Ethernet network:
Credit-Based Shaper (CBS) [
21]
Time-Aware Shaper (TAS) [
22]
Cyclic Queuing and Forwarding (CQF) [
23]
Asynchronous Traffic Shaping (ATS) [
24]
In [
25], the authors describe the CBS as a transmission selection algorithm for multiple traffic classes, with each queue maintaining a credit value for a service. While packets are waiting in the queue to be sent, the credit value increases. When a packet is sent from the queue, the value decreases. The dependence of the actual credit value of these events is described per queue by two parameters,
send slope and
idle slope. While this mechanism maintains fairness among all services using the network, it does not guarantee optimal delay bounds. With CQF, all network devices are synchronized to share a periodic transmission time frame, guaranteeing that a packet is transmitted over a single hop within each cycle. The forwarding schemes are rather simple to configure, although this is only suitable for applications that tolerate a maximum jitter of the duration of a whole cycle. The ATS differs from other alternatives by not relying on a common synchronization of clocks over all network devices. It achieves deterministic transmission times by deploying per-hop shaping for each traffic flow. According to [
26], it is well suited for sporadic traffic, while for periodic traffic with moderate to high loads it is outperformed by TAS.
In this work we mainly focus on TAS, as it allows the network to support multiple TSN streams while enforcing low delay and jitter for all applications. With TAS, each egress port of a bridge has up to eight parallel queues, on which data packets are distributed regarding their respective traffic class. Each of the egress queues contains a gate in either the closed or open state, which controls whether a queue at a certain point in time can be served or not for the sending of data. If several gates are open at the same point in time, an additional transmission selection algorithm decides how to prioritize the queues.
The configuration of the TAS gating behavior of one egress port is described by a GCL. The GCL contains a sequence of state arrays, and their dimension corresponds to the amount of traffic classes. Each state array describes the states of all gates and is linked to a time parameter, which describes the duration for which the state array is active. The TAS iterates over this cyclic list of states and executes a periodic traffic forwarding scheme consisting of several time slots in which only specific traffic classes are sent.
4.2. 5G
The fifth generation of mobile communications (5G), standardized by 3GPP, is expected to satisfy the demand on increasing data rates in the private sector as well as to meet the requirements of further applications in public life and industry. For 5G, the following application profiles are appointed [
27]:
eMBB (enhanced Mobile Broadband) for large data rates:
streaming
mass events
VR/AR
mMTC (massive Machine Type Communication) for networking a large number of devices with minimal energy resources:
uRLLC (ultra Reliable Low Latency Communication) for fail-safe low latency communications for safety-critical applications:
industrial control links
autonomous driving
In order to support such a wide variety of use cases, 5G has to be highly configurable. Many possibilities for flexible allocation of network resources can be deployed, e.g., Network Function Virtualization (NFV), network slicing, the QoS framework, Bandwidth Parts (BWPs), flexible Subcarrier Spacing (SCS) and frame format, etc.
A packet entering the 5GS is mapped via Non-Access Stratum (NAS) packet filters to a specific QoS Flow, which is part of a Protocol Data Unit (PDU) Session. A PDU Session may be of the Ethernet type, i.e., the information contained in the packet’s Ethernet header is relied on to determine the forwarding of packets. Entering the Access Stratum (AS), the packets of a QoS Flow are then mapped via AS Mapping Rules to a Data Radio Bearer (DRB). The AS Mapping Rules are configured by the Radio Resource Control (RRC) layer and executed by the Service Data Adaption Protocol (SDAP) layer. A DRB carries all QoS Flows which are to receive the same forwarding treatment over the air interface, and represents a single logical channel to the Medium Access Control (MAC) layer.
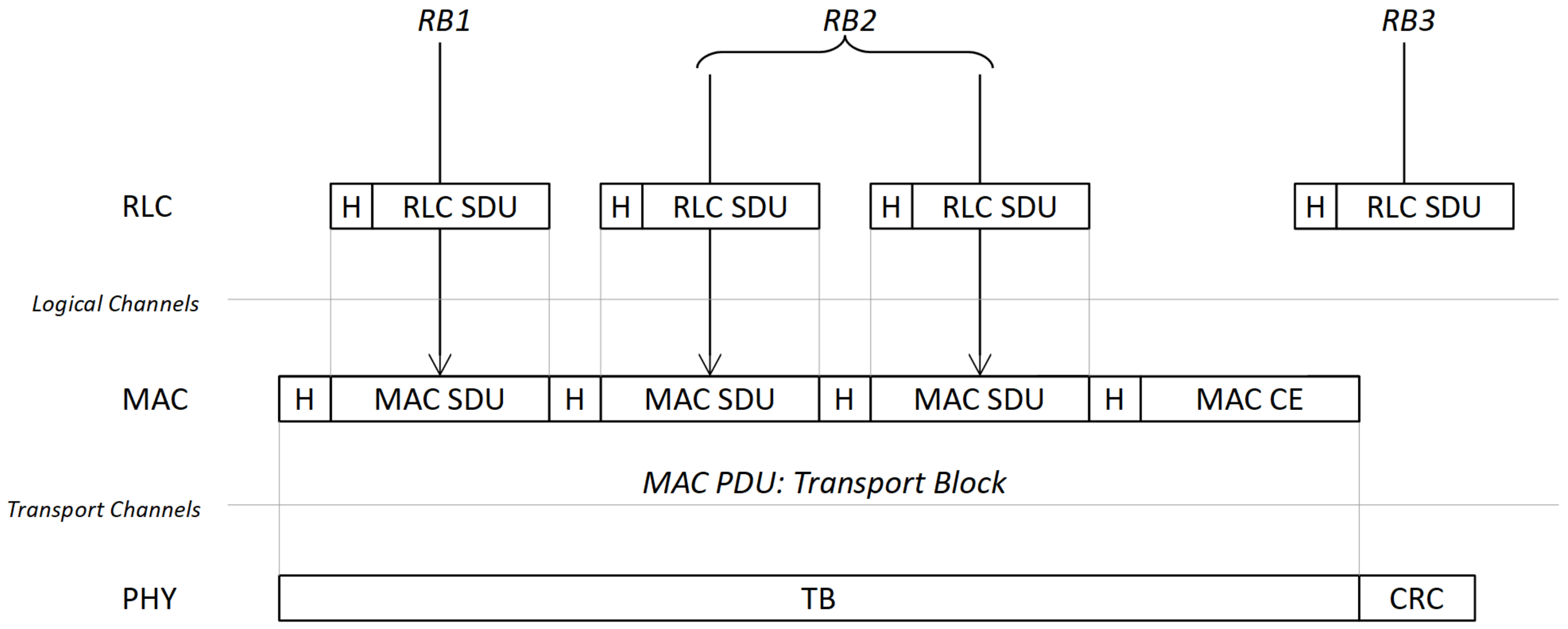
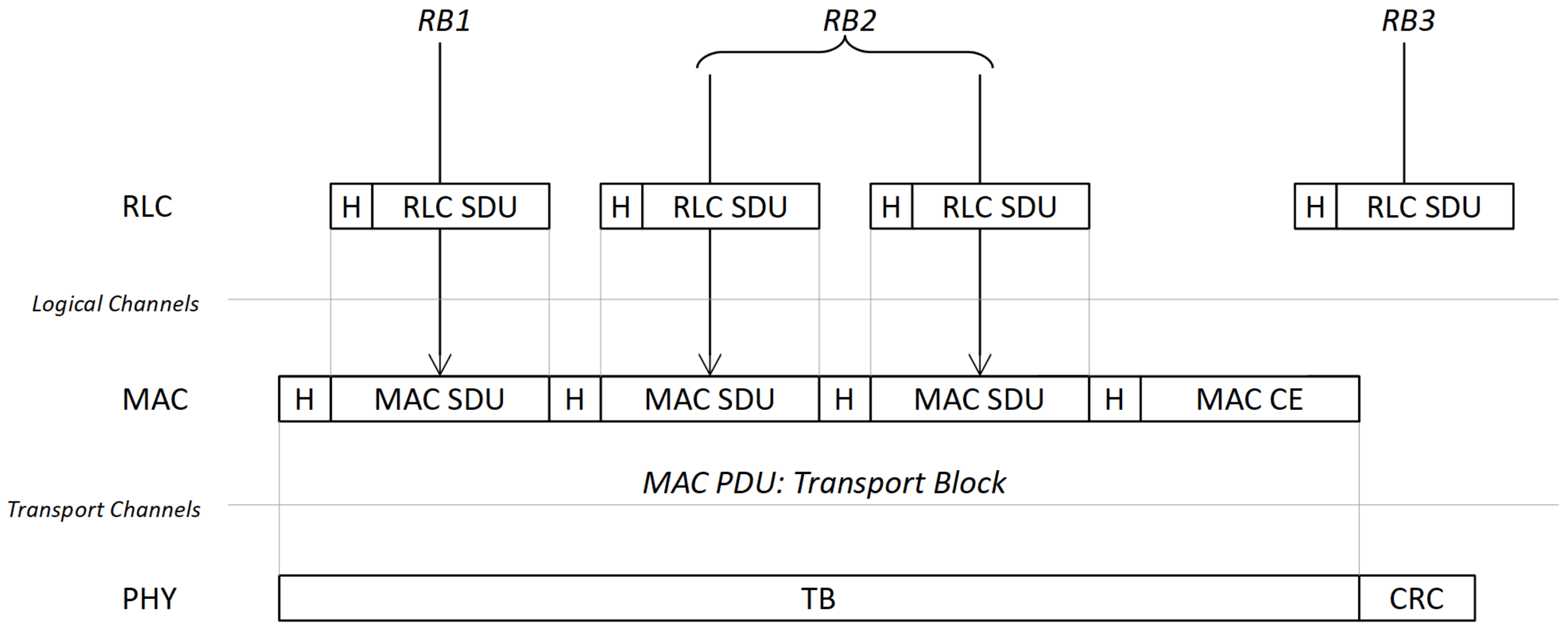
The allocation of physical radio resources to logical channel instances of all UEs is a service provided by the MAC layer to the upper layers. The decision as to how the resources should be divided is performed by the scheduler as part of the MAC layer in the gNodeB (gNB). At every Transmission Time Interval (TTI), resources are divided on a per-UE basis. Several scheduling algorithms can be used in combination with additional mechanisms such as SPS or Configured Grant (CG) to determine the allocation of radio resources to UEs. Within the granted resources for a specific UE, multiple logical channel instances then compete for the channel resources. For every UE, several MAC Service Data Units (SDUs) and MAC control elements (CEs) are assembled to a Transport Block (TB). Every sub-PDU is preceded by a MAC subheader. The sub-PDUs assembled in a TB can be:
User plane data from DRBs
Control plane data from Signalling Radio Bearers (SRBs)
MAC Control Elements
Padding bits to fill the standardized TB size
For user plane data, the order in which the logical channels are served is determined by Logical Channel Prioritization (LCP). For this, the RRC layer configures the MAC layer with three parameters per logical channel:
Priority
Prioritized bit rate
Bucket size duration
The logical channels, which are candidates for resources of a TB, are served in decreasing priority order. If the prioritized bit rate of a logical channel is set to infinity, it obtains as many resources as are needed for the entirety of the queued data. Otherwise, enough resources are allocated to ensure compliance with the prioritized bit rate [
28].
Figure 1 shows an example of a scheduling procedure covering several Radio Bearers for one UE. Here, the Radio Bearer
RB3 maps to the logical channel with the lowest priority; it is not served in this TTI, because the TB is completely filled by the PDUs of the other Radio Bearers and a MAC Control Element.
4.3. Integration Architecture of 5G and TSN
3GPP TR 23.734 [
29] defines two ways of modeling 5GS from the perspective of TSN:
Link Model: The 5GS acts as a simple link between several TSN switches, and therefore corresponds to a cable linking two TSN-capable devices.
Bridge Model: The 5GS acts as a TSN bridge itself, being a node in the TSN domain, and receives configuration data from the TSN control plane.
The Link Model is easier to implement than the Bridge Model, as it only requires a nearly constant bandwidth and no kind of traffic shaping. The link between the User Plane Function (UPF) and the UE is mapped to an Ethernet connection between two TSN devices. The corresponding PDU session within the 5GS needs to be configured accordingly. This requires the QoS parameters allocated by the PCF to be either fixed for such kinds of connections, which may lead to inappropriate dimensioning of the values, or dynamically negotiated with the TSN control plane, which can require adaption of the TSN standards. On the other hand, the Bridge Model is more in line with the characteristics and capabilities of the 5GS, which is a self-organized instance connecting many ports over a wide area. For TSN itself, we use the centralized architecture model, because it corresponds to the strategy of Control and User Plane Separation (CUPS) instantiated in the Fifth Generation Core (5GC).
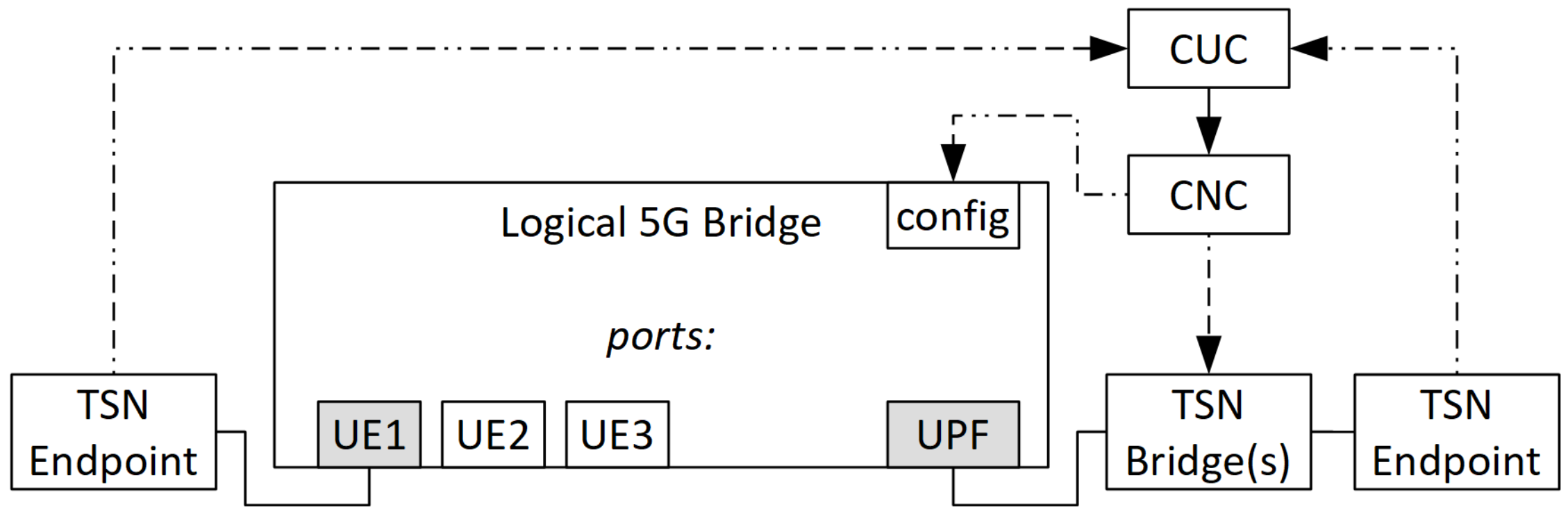
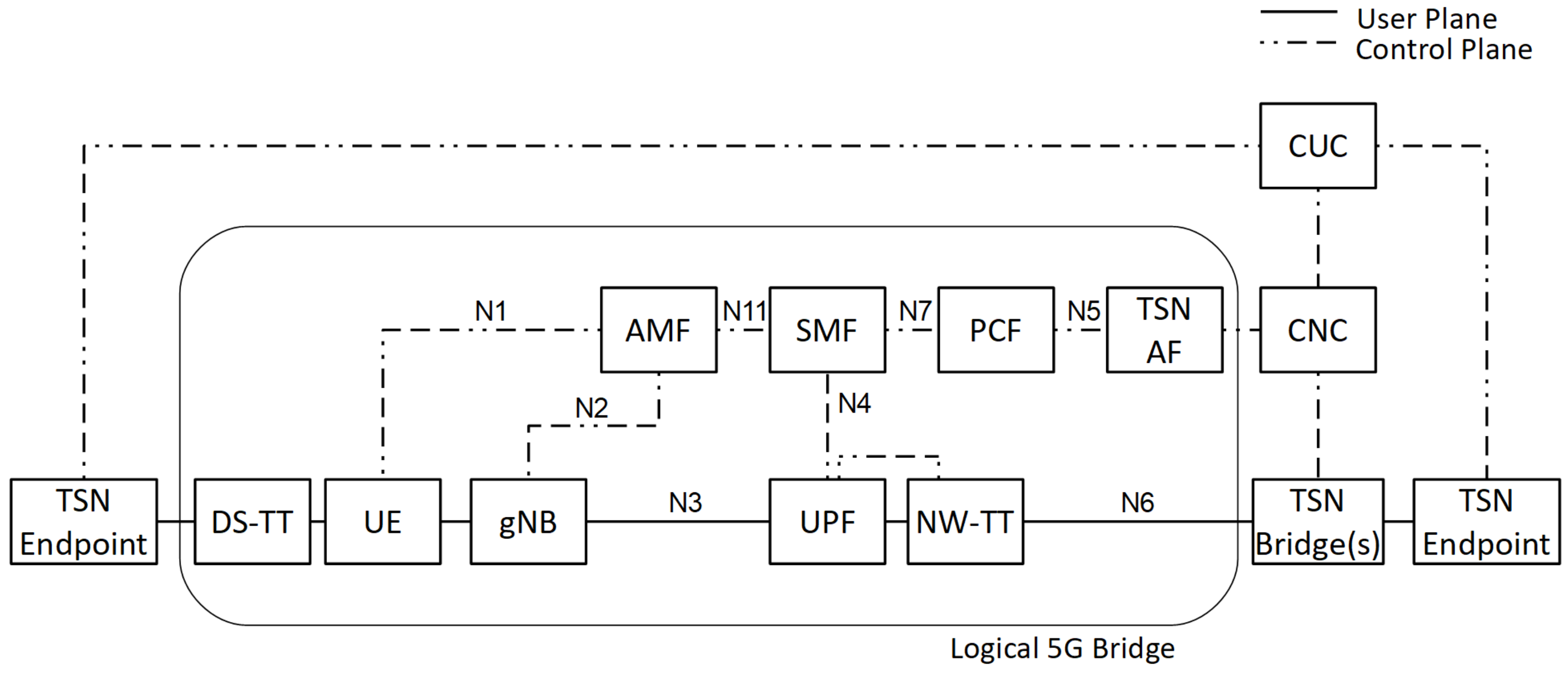
This leads to the integration architecture of 5G TSN, where the CNC is connected to a TSN Application Function (AF) in the 5GC. At the edges of the 5GS, i.e., behind the UE and the UPF, two Translator Functions, a Device-side Translator Function (DS-TT) and Network Translator Function (NW-TT), are deployed; these provide information about both the 5G time domain and the TSN time domain for synchronization purposes. In addition, they are meant to execute Hold/Forward Mechanisms (H/F) according to the different traffic classes in order to hide the 5G internal packet forwarding behavior from the TSN domain. The architecture regarded in this work is illustrated in
Figure 2.
The configuration process for a TSN stream starts with the communication partners sending their requirements to the CUC, which forwards the requirements of all nodes to the CNC. The CNC computes the configuration scheme for all nodes of the network and distributes it. In the case of the 5G Bridge, this configuration in the form of GCLs is received by the TSN AF, which translates them into QoS parameters interpretable by the 5GC. According to these parameters, QoS Flows are then set up for the TSN traffic classes. This is achieved by the Policy Control Function (PCF), which provides all QoS parameters for the associated PDU Session to the Session Management Function (SMF). The SMF then configures the UPF accordingly and forwards the configuration data to the NG-RAN via the Access and Mobility Function (AMF).
5. Analysis of the Channel Access Prioritization of Packets
This section provides an analysis of differences in the interpretation of packet forwarding rules in 5G and TSN.
5.1. Impact of Slot Boundaries on Packet Forwarding
The CNC configures the 5G Bridge with GCLs containing time slots for several traffic classes. As a GCL describes the traffic shaping behavior of an egress port, there is one GCL for each UE and one for each UPF connected to the TSN user plane. A GCL responsible for a UPF affects uplink traffic and a GCL responsible for a UE affects downlink traffic. The temporal course of the channel access priority
of traffic class
i for port
j can be described as follows:
where
is the overall duration of the GCL
and are the slot boundaries for a traffic class in a GCL, where
is the priority according to the Transmission Selection between multiple traffic classes with simultaneously open gates
Here, the traffic classes are granted access to the channel in decreasing priority order, omitting classes with . The expression with describes the channel access priority over one period of the GCL.
A first approach to interpreting the slot boundaries from the perspective of the 5GS can be to determine the later boundary of a GCL slot as a periodically occurring deadline for forwarding packets of this traffic class on its respective path between UPF and UE. This results in the need for a time-aware and packet-based scheduling mechanism which prioritizes the packets of traffic classes with earlier deadlines. While the time range behind the deadline is cleared when forwarding packets from such a traffic class, the availability of bandwidth and the jitter of ingress packet streams due to the prioritization of other streams with the next deadline may lead to packets being forwarded before the early boundary of their respective GCL slot has occurred.
Therefore, both the early and the late boundary of every GCL slot has to be attended to when determining the prioritization of packets in the forwarding process. In this way, the forwarding of packets of a specific traffic class can be limited to the period of time between the two slot boundaries. At this point, we assume that the GCL slot of a traffic class occurs only once within the overall GCL period. The two slot boundaries of a traffic class within a GCL divide the GCL period into two intervals. During the first time interval the packets of the respective traffic class are not allowed to be transmitted, while during the second interval those traffic classes can be transmitted. In the case of several traffic classes being allowed to access the channel during a GCL slot, an additional algorithm corresponding to the Transmission Selection of TAS is needed to organize the prioritization of those classes.
5.2. Mapping of Scheduling Decisions
The transmitting behavior of UEs and gNB needs to be organized through a time grid known to all participants of the radio channel. The access to the radio channel is organized by a central instance, the MAC scheduler of the gNB. The scheduling decisions are updated and communicated in a time-discrete manner according to the TTI grid. In the case of dynamic scheduling, decisions about the amount of radio resources granted for the downlink and uplink of each UE are made at every TTI, affecting one Transport Block per UE (and MIMO layer). Therefore, the decision regarding which traffic classes are served channel access is made once per TTI as well. Because of the flexible Subcarrier Spacing and scheduling formats, the duration of a TTI in 5G can reach from 1000
s (15 kHz SCS and slot-based scheduling) to 8.93
s (240 kHz SCS and mini-slot scheduling over two OFDM symbols) [
15].
The TSN standard, 802.1Qbv [
22], describes the time parameter for the duration of a single GCL slot in the unit of nanoseconds, a much smaller order of magnitude than the smallest possible TTI in 5G. Therefore, in relation to the 5G TTI grid, decisions about the channel access of packets belonging to different traffic classes in TSN are taken nearly continuously based on the traffic class affiliation of a packet and the current point in time.
This leads to the conclusion that the continuous conditions
derived from the GCLs need to be mapped to a discrete set of scheduling conditions
:
This kind of sampling results in additional restrictions according to the composition of GCLs. The duration of the time interval that describes a single slot of a GCL has to be at least one TTI in order to be regarded in the set of scheduling conditions with certainty:
In the event that
or a multiple thereof corresponds to the temporal grid of the TTI, the GCL requirements can be mapped to a finite set of scheduling conditions
. The vector
corresponds to one or multiple GCL periods
. If the mapping is supposed to take place only once in the lifetime of a TSN stream, the overall duration of the GCL must be either a multiple or a whole divisor of 0.5 ms, as the grid of radio frames in the Next Generation Radio Access Network (NG-RAN) aligns every 0.5 ms independent of the active subcarrier spacing [
30]. If this condition cannot be met, the temporal relation between the GCL requirements and the executed scheduling decisions is constantly shifting. Therefore, the mapping from
to
needs to be updated on a regular basis. The more often this update is executed, the smaller the dimension of
, and vice versa. At this point, a trade-off between the less frequent transmission of a larger control channel payload and the more frequent transmission of a smaller control channel payload has to be made.
5.3. Conditions for TSN-Compliant Scheduling
When the traffic forwarding conditions are mapped to a time-discrete course of scheduling priorities, certain conclusions for a TSN compliant scheduling architecture in NG-RAN can be derived.
5.3.1. Access Stratum Mapping Rules for Time-Sensitive QoS Communications Flows
Packets belonging to Time Sensitive Communications (TSC) QoS Flows must be able to be scheduled separately from packets of Best Effort traffic or other TSC QoS Flows that are in use in the same UE. Therefore, every TSC QoS Flow needs to be mapped to its own Radio Bearer. In this way, different TSN streams appear to the MAC scheduler as different logical channel instances, i.e., separately servable queues.
5.3.2. Time-Variant Logical Channel Prioritization
The requirement that a packet be forwarded related to the conditions requested by the TSN control plane relies on both the TSN stream it belongs and on the current point in time. Therefore, a time invariant LCP is not appropriate for the forwarding of packets belonging to a TSN traffic class. Instead, the priorities of the logical channels, i.e., instances of the Dedicated Traffic Channel (DTCH), have to be updated for every TTI matching the current status of the applicable GCL. At that point, the periodicity of the GCL can be exploited to define a finite set of LCPs described by a vector for every logical channel.
5.3.3. Introduction of Blocking Priority
Assuming that updating is applied to the LCP at every TTI, the functionality of the TAS transmission gates for every traffic class needs to be adopted by the scheduling mechanism. In order to enable the migration of the GCL controlled traffic shaping into native NG-RAN functions, a novel kind of logical channel priority has to be introduced. A logical channel of this blocking priority is not served at all for the respective TTI. In combination with a time variant LCP, this enables the realization of the gating mechanisms requested by the GCL.
6. Framework for Dynamic Logical Channel Prioritization
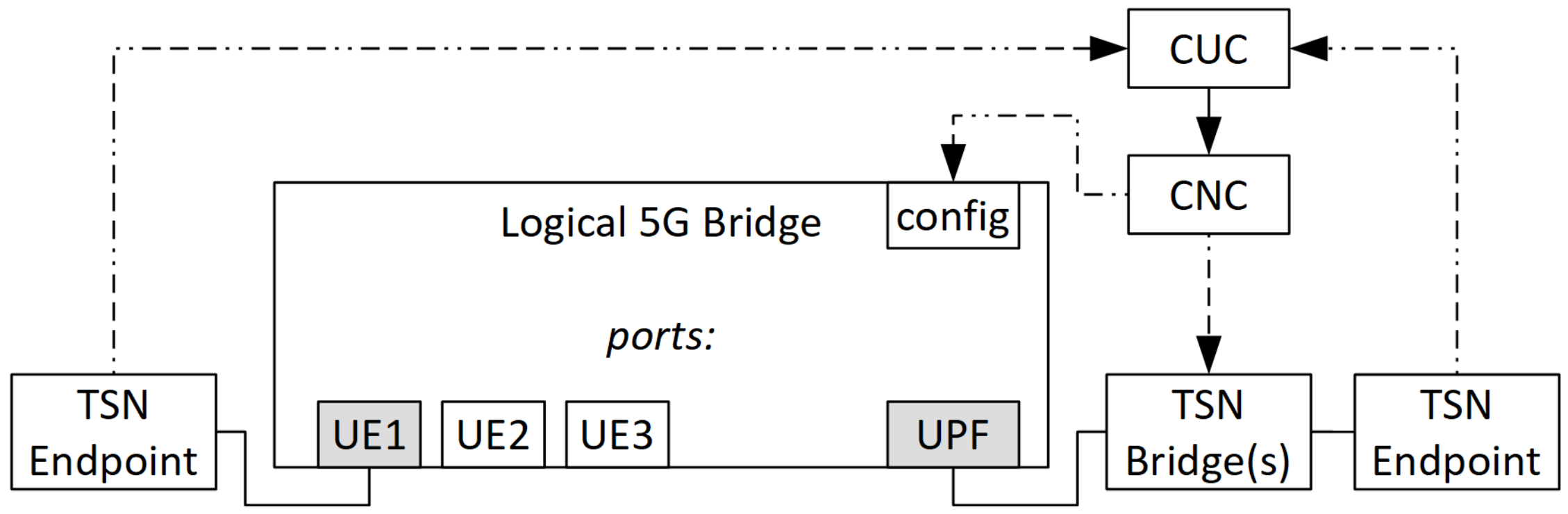
The 5GS in the role of a TSN bridge according to the introduced integration architecture can be depicted as shown in
Figure 3. UE1 and the UPF correspond to ports that are connected to the TSN domain, and which are therefore configured via the CNC, each with a GCL.
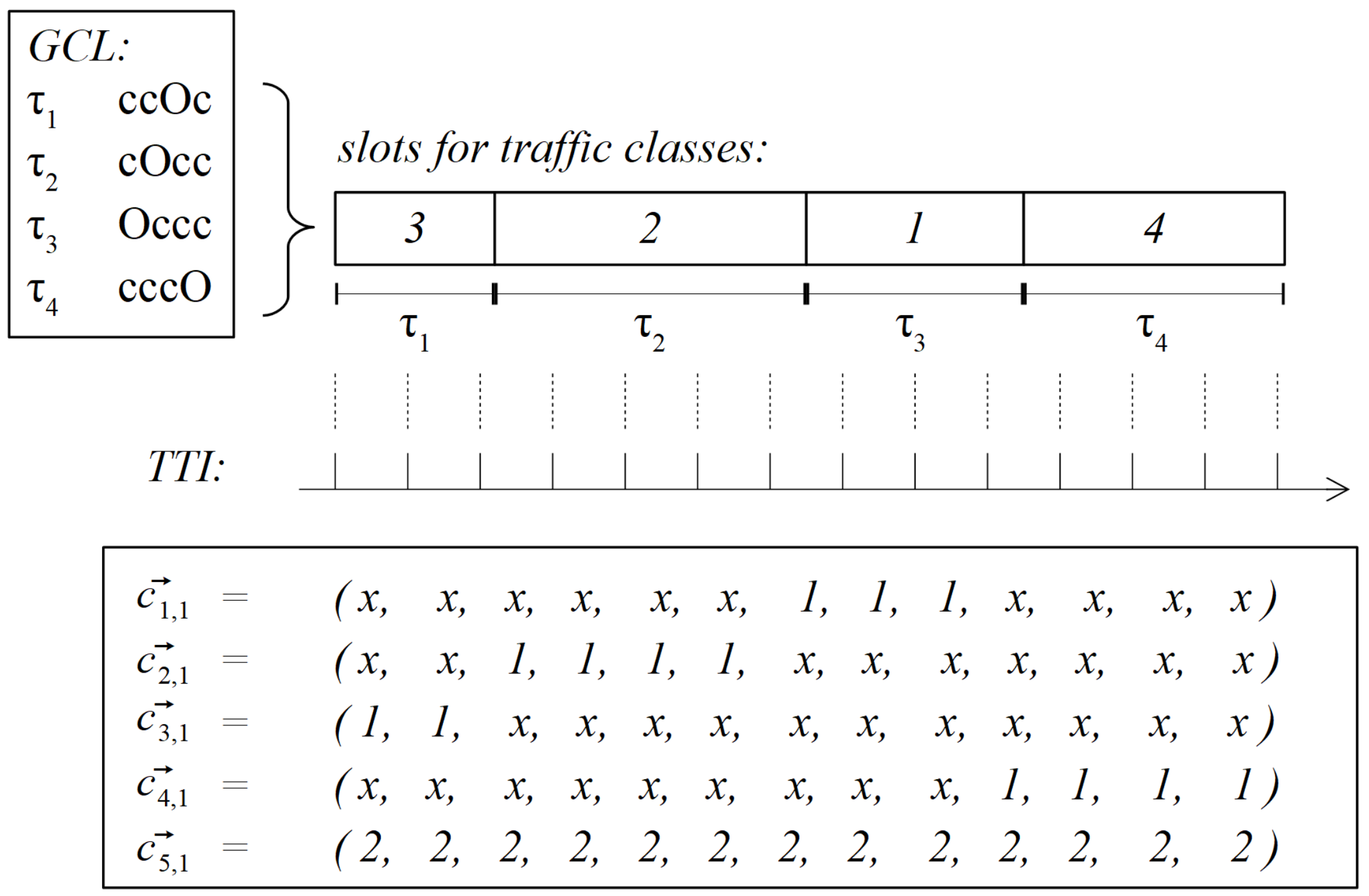
Figure 4 illustrates an example for the translation of a GCL’s requirements into discrete sets of logical channel priorities for the well suited case in which
matches the time grid of the TTI. Assuming that
Figure 4 depicts the GCL controlling the egress port of UE1 (
Figure 3), the derived logical channel priorities are applied in the downlink. Here,
x stands for the blocking priority. The LCP vector
corresponds to the Default Radio Bearer carrying Best Effort traffic with non-TSC priority. The GCL contains four gate control entries for four traffic classes each. The time interval values
depict the duration for every gate state, which carries the values
c (closed) or
O (open) for the four traffic classes. Every traffic class contained in the GCL is mapped to its own Radio Bearer, resulting in four logical channel instances for TSC traffic. Together with the Default Bearer, five DTCH instances are configured for this UE in the downlink.
The representation of the scheduling conditions in the form of LCP vectors makes the traffic shaping applicable to the MAC scheduler, as the only differences with the former scheduling procedure are cyclic iteration over the LCP vectors at every TTI and the interpretation of the blocking priority. The temporal variation of the logical channel priorities ensures guaranteed channel access for every TSN stream over the NG-RAN air interface, analogous to the functionality of the 802.1Qbv TAS. However, the proposed mechanism does not increase the reliability of the communication link provided by the 5GS to TSN, and therefore needs to be combined with further uRLLC mechanisms for high reliability, such as the use of a robust MCS, Packet Duplication via Packet Data Convergence Protocol (PDCP) layer, or redundant N3 paths.
7. Evaluation
The purpose of this evaluation is to validate the traffic shaping behavior of a scheduler using dynamic LCP (dLCP) for multiple TSN streams over a single UE. Therefore, we set up a system-level simulation of the NG-RAN using the Matlab 5G Toolbox. It contains Physical Layer (PHY), MAC, Radio Link Control (RLC), and an application layer. We configured four Radio Bearers for the connection of one UE and a gNB in the downlink direction. Three Radio Bearers carry TSN traffic classes. The packets for the three TSN streams are generated by the application layer with a periodicity of 10 ms, while the packets for the fourth Radio Bearer are generated every 1 ms, i.e., every slot with a SCS of 15 kHz. Radio Bearer 4 is deployed in order to simulate the influence of additional Best Effort traffic using the remaining channel resources after the allocation of resources to the highly prioritized traffic.
Across several series, measurements for the passed time between the sending and receiving of messages were captured and analyzed. This was performed for the dLCP in order to evaluate whether the requirements of deterministic and time-critical communication for TSN traffic were fulfilled. Additionally, a comparison with the static approach is provided here to demonstrate the difference in effect and prove that the proposed mechanism and our implementation operate as intended.
With dLCP deactivated, the three Logical Channels carrying TSN traffic are configured with the same Logical Channel Priority, and the Logical Channel carrying Best Effort traffic is configured with a lower Priority. The Prioritized Bit Rate is set to infinity, meaning that a Logical Channel being served is granted enough resources to send all of its remaining data. When dLCP is activated, the Logical Channel Priorities of the TSN streams are updated at every TTI, e.g., every slot, enforcing a GCL of the periodicity of 10 ms. The GCL contains time slots for each of the three TSN traffic classes, covering three TTIs, respectively. In order to isolate the consideration of the traffic shaping behavior from the influence of retransmissions and additional overhead, the RLC entities run in Unacknowledged Mode and the simulated Block Error Rate in the Physical Layer is set to 0. The variation of the channel quality is considered by varying the CQI for every Resource Block once in every slot by a random value in the range of ±5. The channel quality has an impact on the applied MCS, and therefore on the available Transport Block Size at every TTI.
Over a period of 100 NG-RAN frames, i.e., 1000 TTIs, measurements are made for the slot (TTI) in which every packet of each TSN stream is received completely.
Figure 5 and
Figure 6 show the accumulated and normalized amounts of packets received in each slot.
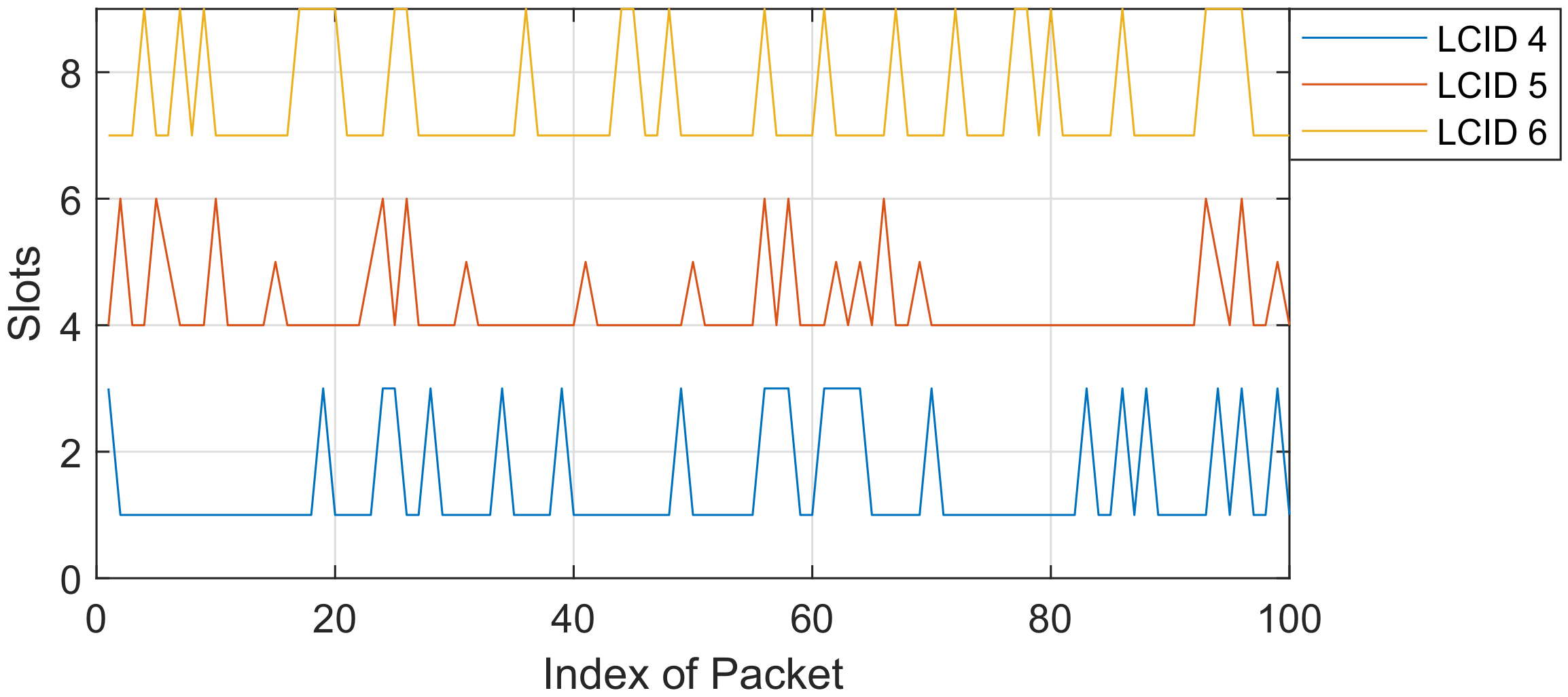
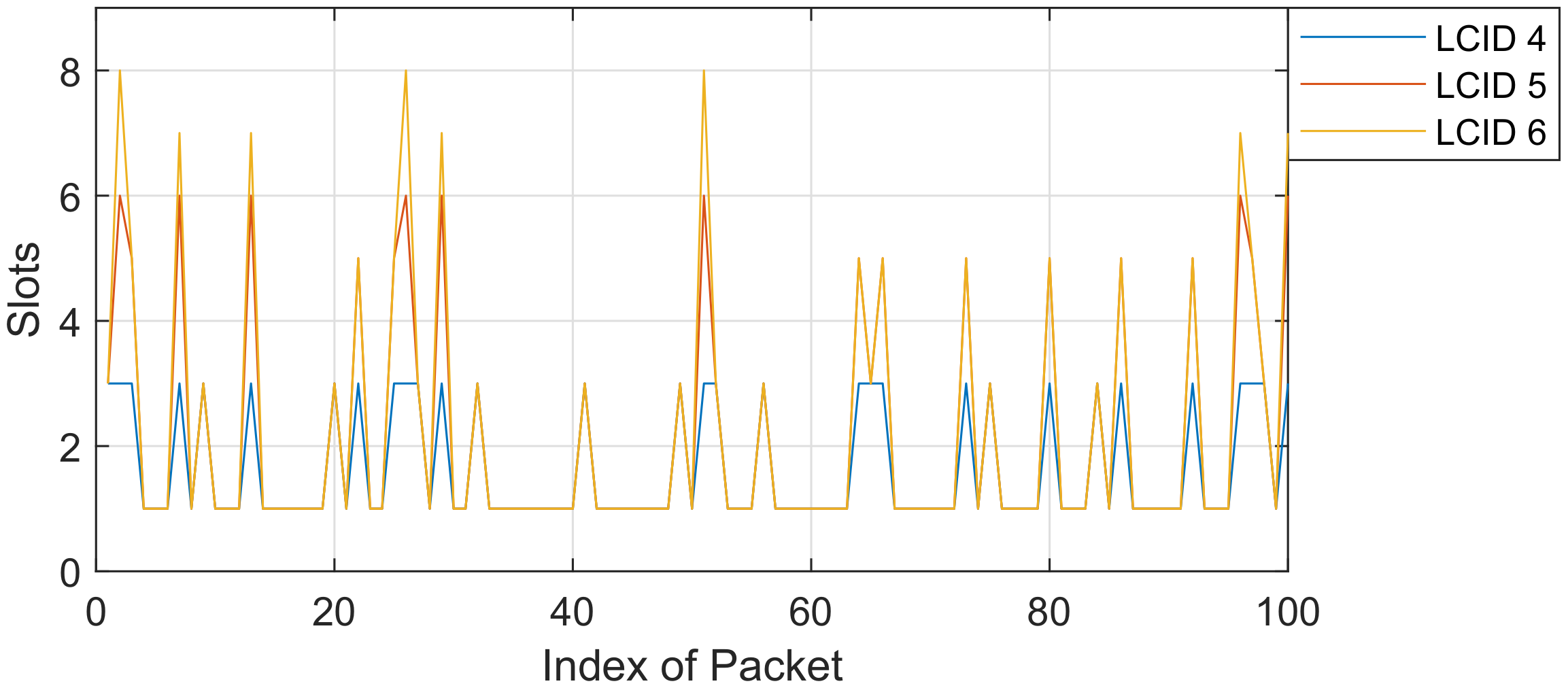
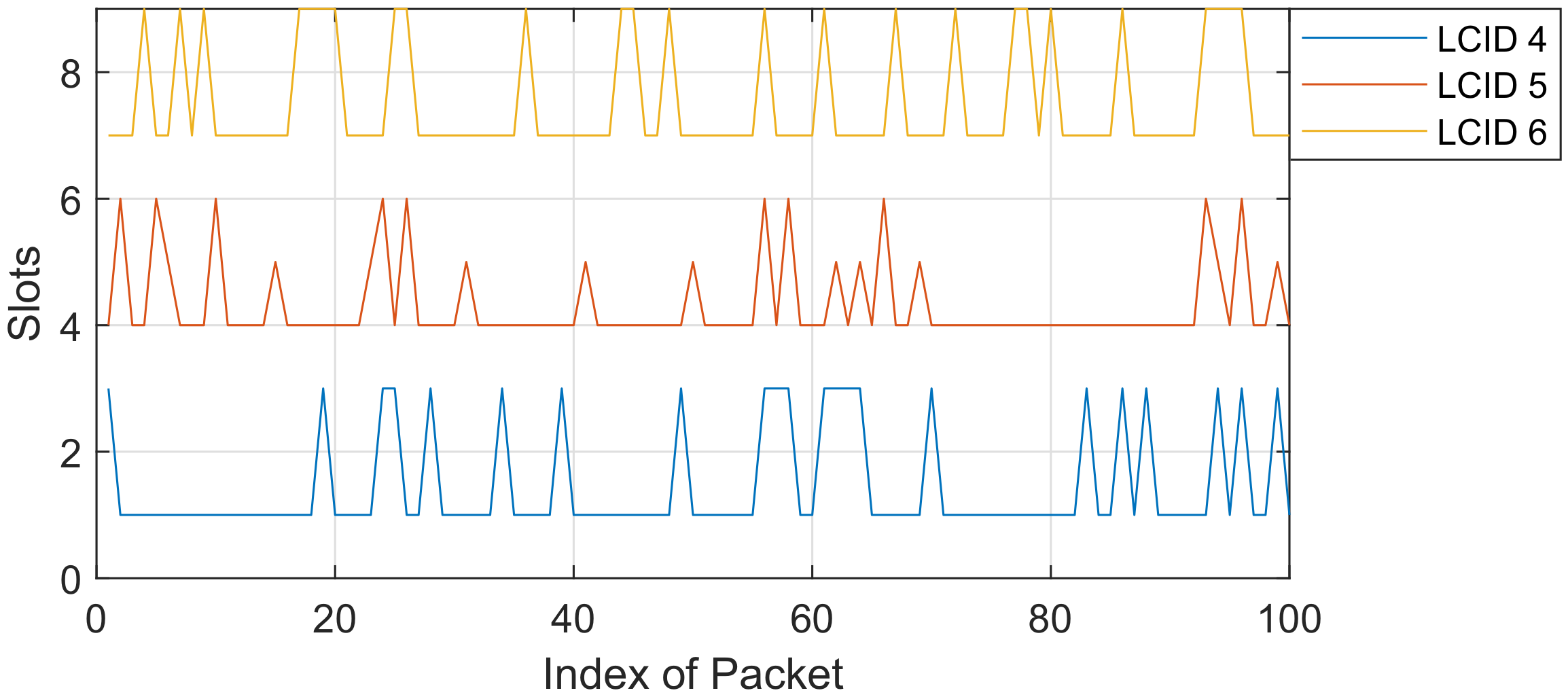
Figure 7 and
Figure 8 show the slots for the arrival of each packet with and without dLCP, respectively. In the latter case, the interval of ten slots is divided into three different slots, in which only a specific TSN traffic class is allowed to access the resources of a Transport Block.
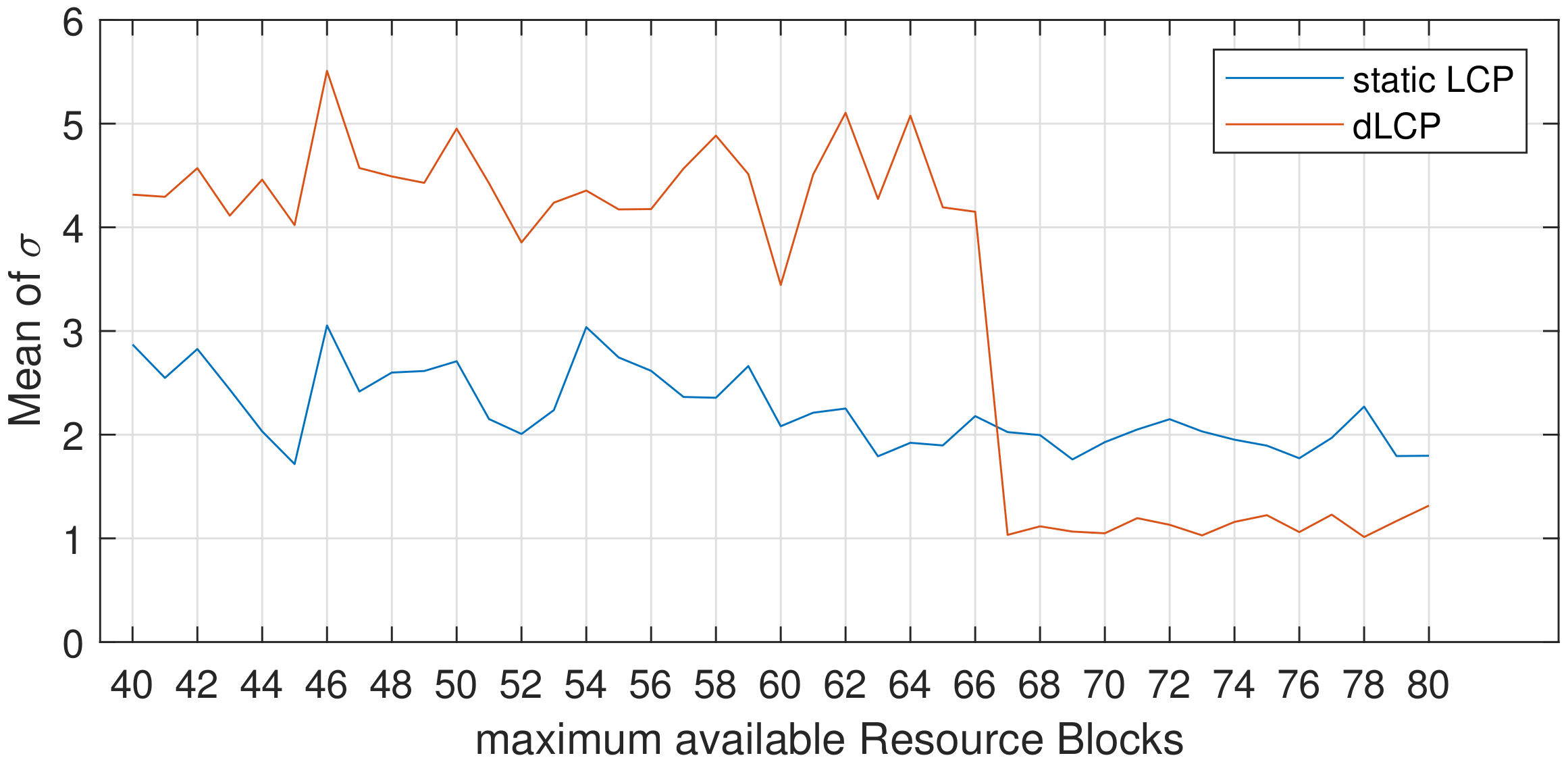
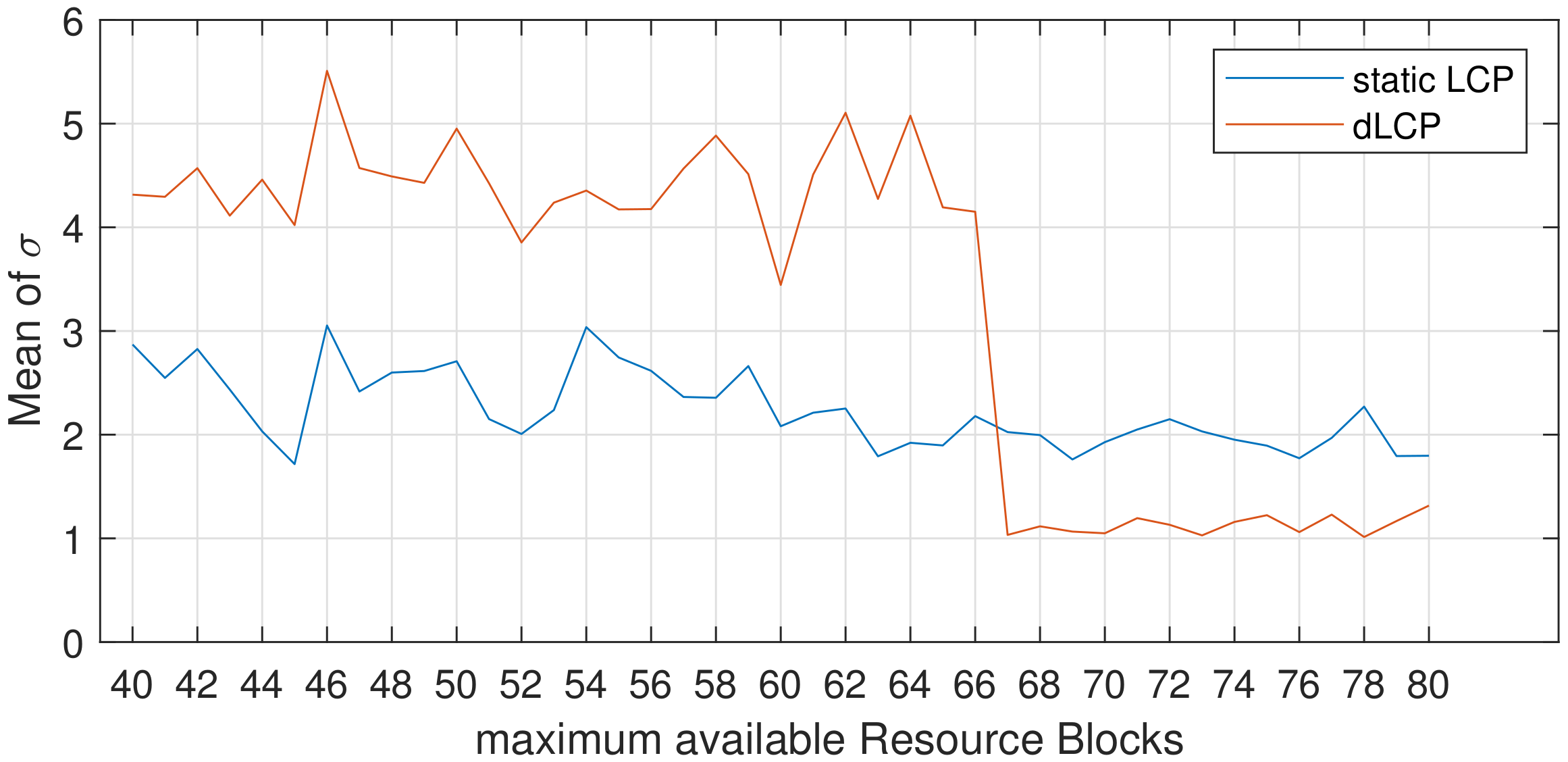
In order to evaluate the impact of dLCP on the determinism of parallel TSN streams, we consider the jitter of the packet arrival times in the UE. The amount of elapsed TTIs between the reception of two consecutive packets is measured. This results in a data series in which the deviation of a packet arriving from the regular transmission framework of 10 ms corresponds to a peak in the data. Therefore, the mean of the standard deviations of the data series can be taken as a measure of the determinism of the packet transmission, with lower values corresponding to a higher degree of determinism. This value is computed for the use of dLCP and the use of normal (static) LCP, respectively, for different packet sizes of the TSN streams. Additionally, the maximum amount of grantable Resource Blocks is varied.
Figure 9,
Figure 10 and
Figure 11 show the results for packet sizes of 700, 800, and 900 bytes. It can be derived that the arrival times of the packets can be shaped in a deterministic manner only when the resources of the radio channel in one GCL period are sufficient to transport the required traffic within the respective GCL slots of the traffic classes. In the event that a packet cannot be entirely transmitted before the end of its GCL slot, the TSN requirements cannot be met anymore, leading jitter to increase drastically because the data has to be queued until the next GCL period. The figures show that this turning point with respect to the number of available Resource Blocks depends on the packet size. This is an expected behavior, as larger payloads require more radio resources.
Depending on the criticality of the application, a strategy for this case may have to be configured beforehand. Possible tools allowing the network to react by temporarily decreasing radio channel resources include the dropping of packets or the transmission of feedback to the application via the Application Function in the 5G Core.
8. Conclusions and Future work
While the standardization process of 5G is moving on to Rel-17 and beyond, the need for a higher degree of compatibility with TSN has gained high interest and is already receiving attention. However, the restrictions involved with maintaining the scheduling mechanisms of former broadband mobile communications includes the need to add architectural structures which require additional configuration schemes themselves. The deployment of H/F functions separate from the AS consumes network resources and increases the complexity of Session Management, as traffic shaping has to be applied by Translator Functions.
In this work, we propose a novel LCP framework. An analysis of the different packet forwarding behaviors of TSN and 5G leads to the conclusion that TSN-compliant scheduling in 5G can be achieved through a time-variant LCP according to the periodic stream requirements in the GCL. Dynamic Logical Channel Prioritization (dLCP) enables the execution of TSN-compliant traffic forwarding by native RAN mechanisms, thus avoiding the need to deploy additional H/F functions in the core or the UE. The functional complexity of the Translator Functions is reduced, while the scheduling framework of the RAN gains a new degree of freedom. The simulation of an exemplary downlink traffic scenario for multiple TSN streams over a single UE has shown that the traffic shaping requirements of a GCL can be met using dLCP if the available radio resources are sufficient.
In subsequent work, we intend to evaluate which changes to the current 3GPP standards are necessary in order to apply a dLCP in NG-RAN. Furthermore, it is necessary to determine the configuration process needed to set up TSN streams over 5G, to be be followed by an implementation and evaluation phase presupposing the existence of a Standalone 5G Software Defined Radio (SDR) solution. The open source 5G RAN and Core components released in Q1 2021 [
31] by the OpenAirInterface Software Alliance are promising candidates for this purpose.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}